Tim schrieb: > Ich bin immer noch auf der Suche nach eine guten Referenz für das > SWD-Protokoll. Kennt da zufällig jemand etwas? Ich hab letztens mal libswd gefunden: http://sourceforge.net/apps/trac/libswd Das ist eine SWD Library. Auf dieser Seite waren unter anderem folgende Dokumente zu SWD verlinkt: http://www.arm.com/products/system-ip/debug-trace/coresight-soc-components/serial-wire-debug.php http://www.arm.com/files/pdf/Low_Pin-Count_Debug_Interfaces_for_Multi-device_Systems.pdf An die genaue Spezifikation kommt man wahrscheinlich nur als ARM Partner :/ Edit: Die ARM Debug Interface Architecture Specification könnte noch interessant sein. (Kapitel 5.2) http://www.pjrc.com/arm/pdf/doc/ARM_debug.pdf
:
Bearbeitet durch User
Thema Gyros :-) Mal eine Verständnisfrage. Angeblich soll da doch ein präzises Gyrosop verbaut sein, so eins wie in modernen Smartphones. Wieso steht das verflixte Ding dann nicht still sondern driftet?
Oliver Stellebaum schrieb: > Angeblich soll da doch ein präzises Gyrosop verbaut sein, so eins wie in > modernen Smartphones. > Wieso steht das verflixte Ding dann nicht still sondern driftet? Der Drift wird normalerweise über den Beschleunigungssensor ausgeglichen, da dieser langzeitstabil ist. Ist alles eine Sache der Software. Der Drift kommt einfach daher, da das Gyroskop um den "0-Punkt" rauscht und zwar immer etwas mehr im positiven als im Negativen. Da der Absolutwinkel durch Aufintegration der Winkelgeschwindigkeit ermittelt wird, fängt dieser auch bei keiner Rotation des Copters an abzudrifen. Man kann das nicht völlig rausbekommen, da dies auch Temperaturabhängig ist. Normalerweise ermittelt man bei der Initialisierung den "Rauschoffset" und zieht diesen von den Werten ab, damit ist es dann einigermaßen driftfrei, aber eben nicht ganz Auch das Gyroskop im MPU6050 ist nicht driftfrei, solche MEMS-Gyros gibt es halt nicht. Darum verwendet man eben auch den Beschleunigungssensor (da Langzeitstabil) um den Drift wieder rauszubekommen, im einfachsten Fall über einen Komplementärfilter. Damit das natürlich richtig funtkioniert muss der Beschleunigungssensor beim starten auch einmal sauber auf "0°" eingestellt werden, denn sonst wird man immer eine falsche 0°-Lage drin haben.
:
Bearbeitet durch User
Tim schrieb: > Drittcopter Der Trend geht zum Zweitbuch? Äääh Quathsch! .. zum Drittcopter? Ich habe bisher keine Quelle für Copter ohne Fernbedienung gefunden. Hat jemand dazu schon mal Aktivitäten entfaltet? Wenn nicht, würde ich die Anbieter alle mal anschreiben, z.B. für 10 Stück - so als Idee.
Torsten C. schrieb: > Ich habe bisher keine Quelle für Copter ohne Fernbedienung gefunden. Hat > jemand dazu schon mal Aktivitäten entfaltet? Wenn nicht, würde ich die > Anbieter alle mal anschreiben, z.B. für 10 Stück - so als Idee. Vielleicht macht http://www.tmart.com so etwas ja? Meine Bestellung von dort ist inzwischen gut verpackt eingetroffen. Ich kann mich nicht beschweren.
Hat sich mal jemand dieses Kameramodul angeschaut? http://www.tmart.com/Hubsan-X4-H107C-RC-Quadcopter-Spare-Parts-H107-A28-Camera-Module-30W_p226133.html
Manuel Steiner schrieb: > Edit: Die ARM Debug Interface Architecture Specification könnte noch > interessant sein. (Kapitel 5.2) > > http://www.pjrc.com/arm/pdf/doc/ARM_debug.pdf Das hilft auf jeden Fall schon einmal deutlich weiter. Vielen Dank! Die Schnittstelle scheint eine Art bidirektionales SPI zu sein. Das Protokoll ist allerdings doch etwas komplexer, dafür bräucht man wohl einen Protokoll-Analyzer.
Ich suche momentan auch ne Kamera. Aber eher für meinen großen. Habt Ihr euch mal die T9000 angeschaut? Was ist dann da der unterschied zur T8000 habe nur gesehen das die T9000 anscheinend flüssiger läuft. Oder doch die Y3000. Bei Aliexpress liegen zwischen der Y3000 und der T9000 nur knapp 10$.
Also ich hab die HD-Keycam #16 V2. Mit einem dem größeren Öffnungswinkel der Optik macht die ganz passable Aufnahmen. Wenn man die auspackt und an den Flugakku anschließt, müsste sie auch von unserem kleinen getragen werden können. Mein V929 trägt sie ganz gut. Fliegen macht dann nur kein Spaß mehr...
Angehängte Dateien:
-

Capture.JPG
22 KB
Tim schrieb: > Hat sich mal jemand dieses Kameramodul angeschaut? > > http://www.tmart.com/Hubsan-X4-H107C-RC-Quadcopter-Spare-Parts-H107-A28-Camera-Module-30W_p226133.html ist das echt eine cam oder ein laser?
Angehängte Dateien:
-

20131106_174753.jpg
880 KB -

20131106_175904.jpg
1000 KB -

20131106_175945.jpg
880 KB -

20131106_175856.jpg
810 KB


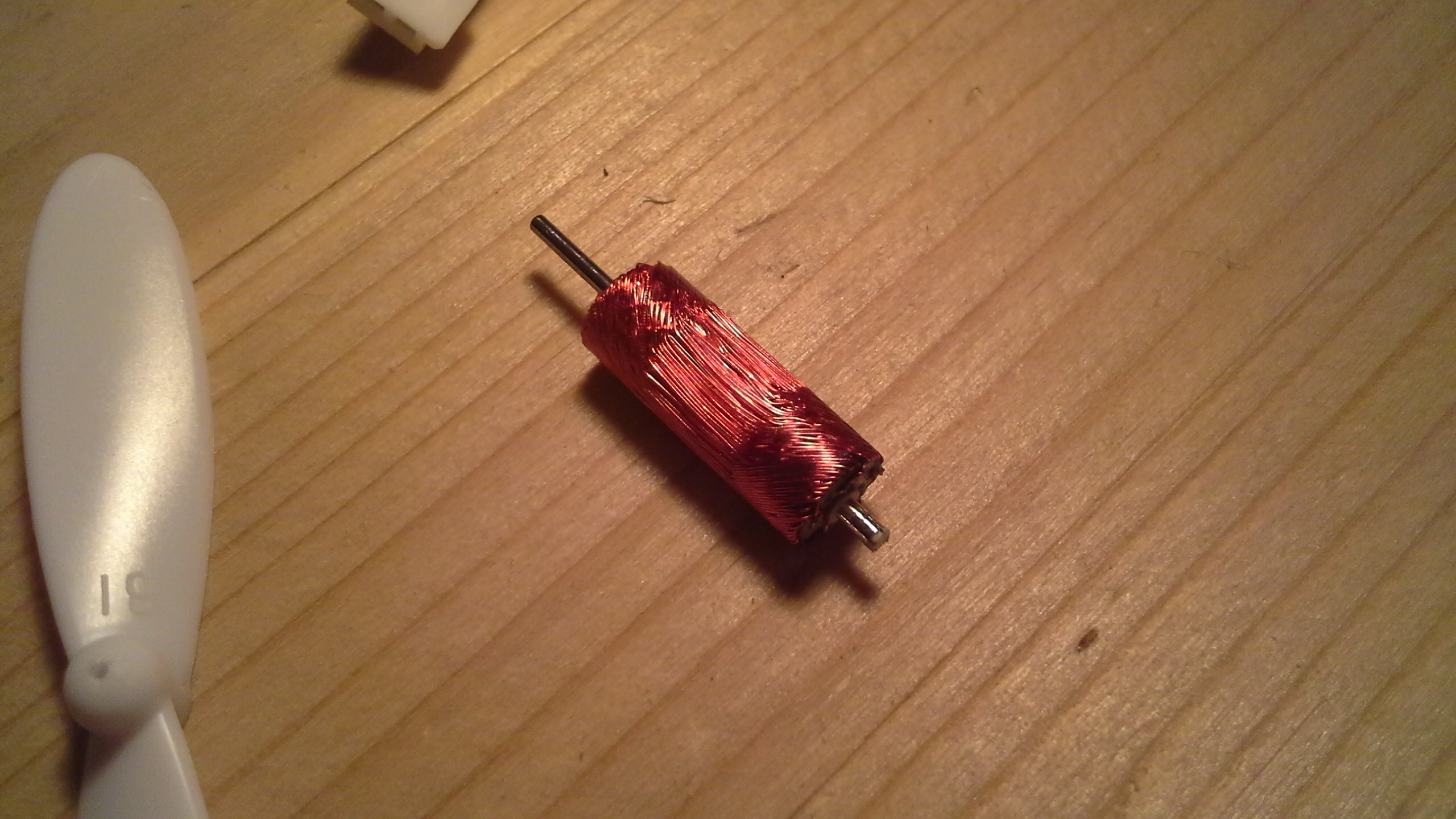
Meiner ist da und schon kaputt :D 2 stockwerke tief gefallen ist das teil auf stein jetzt da hat der motor sich schlecht gedreht , das hab ich behoben nur jetzt bekomm ich nichtmehr den anker in die bürsten :( kann mir da jemand einen Tipp geben ? Das problem war das das lager hoch gerutscht ist und der anker aus der bürste gerutscht ist .
Turbonator schrieb: > ich behoben nur jetzt bekomm ich nichtmehr den anker in die bürsten :( > kann mir da jemand einen Tipp geben ? Leider nur den hier: http://www.tmart.com/2Pcs-JXD-385-006-Alloy-Reverse-Rotation-Motors-Set-for-RC-Helicopter-Metal-Color_p192101.html Aber wenn der Copter flügellahm ist, ist ja mehr Zeit an der Hardware herumzubasteln :)
Hat noch jemand bei bessky_cn bestellt und auch die Ware erhalten? Ich habe inzwischen den Verdacht, dass gar nichts verschickt wurde.
Hmm 4€ für 2 Motoren? Ich hab mir einfach noch nen 2. bestellt.. :D lohnt sich glaub mehr... Hat man alles nochmal als Ersatzteile und zudem einen zum basteln während der andere zum heitzen funktioniert...
Tim schrieb: > Hat noch jemand bei bessky_cn bestellt und auch die Ware erhalten? Ich > habe inzwischen den Verdacht, dass gar nichts verschickt wurde. Ich habe bei dem bestellt, warte wie gesagt noch immer
Nach 40 Tagen läuft Paypal Käuferschutz aus. Würde früh genug das melden. Oder bestellt euch doch schnell den einen aus Frankfurt für 25€.. :http://www.ebay.de/itm/JD-185-MINI-Quadcopter-6-axis-2-4ghz-4-Kanal-Gyro-UFO-MINI-RC-Helikopter-/171097513221?clk_rvr_id=542414730071 Ist ja der selbe wie der aus China..
Tim schrieb: > Hat noch jemand bei bessky_cn bestellt und auch die Ware erhalten? Ich > habe inzwischen den Verdacht, dass gar nichts verschickt wurde. Habe am 11.10.2013 bestellt und der Copter ist noch nicht da. Allerdings ist es bereits der 2. Copter den ich bei bessky_cn bestellt habe. Der erste kam nach knapp zwei Wochen. Also Geduld.
Der copter läuft wieder das war den aufwand ja fast nicht wert für den preis des motors aber danke für den link
Ich weiss nicht obs schon erwähnt wurde, es gibt eine Rekalibrierung: "Maximum speed mode (press twice left button) and put both stick lower left. Led will blink fast when calibration is done." Meiner fliegt nun viel weniger driftend. Mir ist noch aufgefallen, dass er direkt nach einem Crash oft stark in eine Richtung driftet, etwa fünf Sekunden später geht es wieder.
hubsi schrieb: > Ich weiss nicht obs schon erwähnt wurde, es gibt eine Rekalibrierung: > "Maximum speed mode (press twice left button) and put both stick lower > left. Led will blink fast when calibration is done." Danke für den Tipp. Woher hast du ihn?
Ursus schrieb: > Habe am 11.10.2013 bestellt und der Copter ist noch nicht da. Bestellt am 15.10, als verschickt markiert am 17.10 ... noch ein wenig abwarten
hubsi schrieb: > Ich weiss nicht obs schon erwähnt wurde, es gibt eine Rekalibrierung: > "Maximum speed mode (press twice left button) and put both stick lower > left. Led will blink fast when calibration is done." Funktioniert bei meinem Copter nicht.
Joachim Drechsel schrieb: >> Danke für den Tipp. Woher hast du ihn? > > Steht im Handbüchlein. Habe leider nur ein chinesisches Büchlein mitbekommen.
Diese Rekalibrierung ist genau die, die auch nach dem Einschalten gemacht wird, sobald sich der Kopter für eine Sekunde nicht mehr bewegt hat
Chris L. schrieb: > Diese Rekalibrierung ist genau die, die auch nach dem Einschalten > gemacht wird, sobald sich der Kopter für eine Sekunde nicht mehr bewegt > hat Stellt sich die Frage, warum die Kalibrierung über die beiden Steuerknüppel aufgerufen werden kann.
Chris L. schrieb: > Diese Rekalibrierung ist genau die, die auch nach dem Einschalten > gemacht wird, sobald sich der Kopter für eine Sekunde nicht mehr bewegt > hat Gefühlt funktioniert es hier besser seit der Rekalibrierung :)
Ursus schrieb: > Stellt sich die Frage, warum die Kalibrierung über die beiden > Steuerknüppel aufgerufen werden kann. Damit man den rekalibrieren kann. Hmmm, aber das weißt Du ja selbst. Wie ist denn die Frage gemeint? Oder ist Deine Frage, wozu überhaupt eine Kalibrierung gemacht wird? Ist jedenfalls einfacher als den Akku-Stecker aufzutrennen.
:
Bearbeitet durch User
Angehängte Dateien:
-

Unbenannt.PNG
48 KB

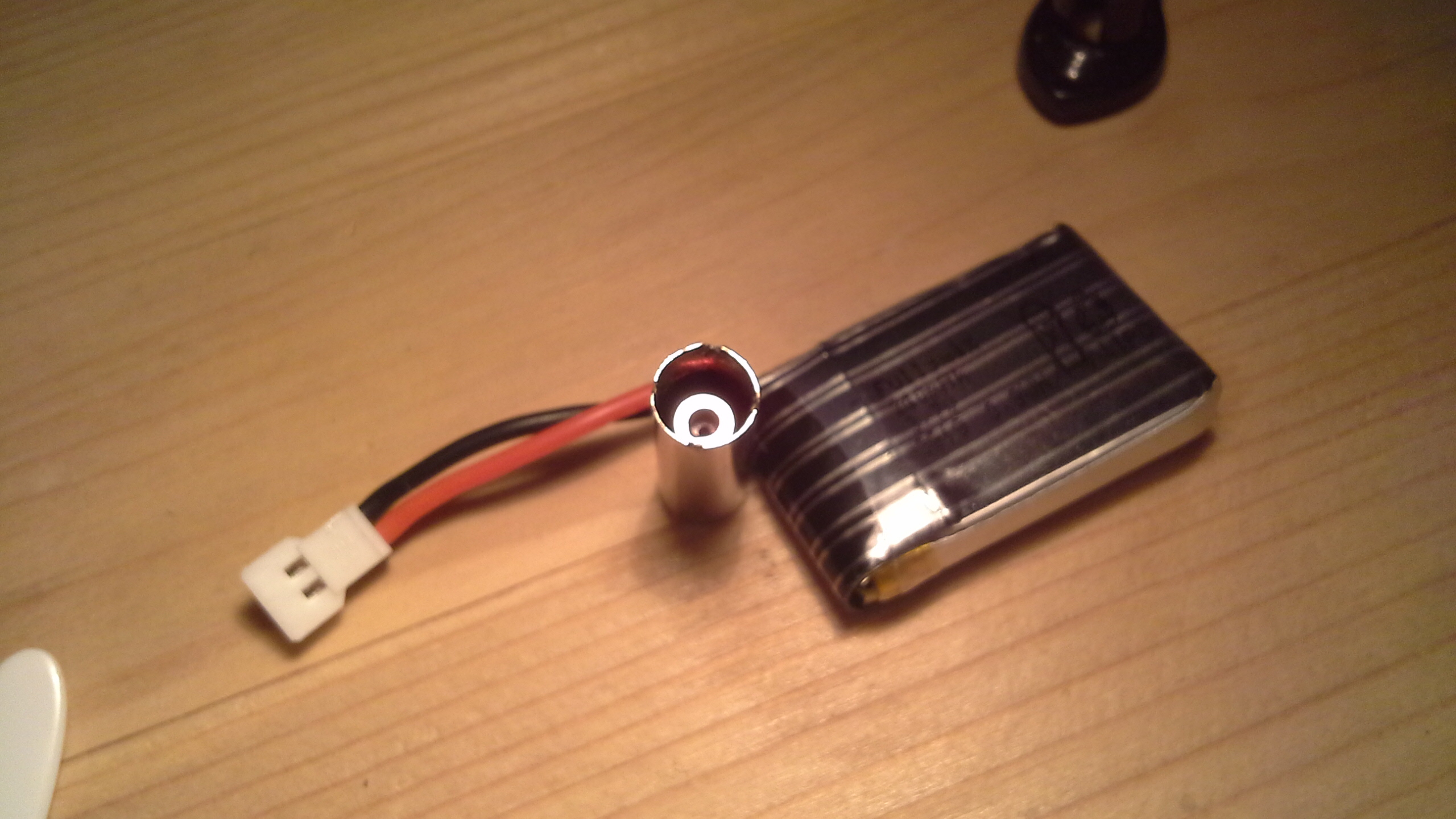
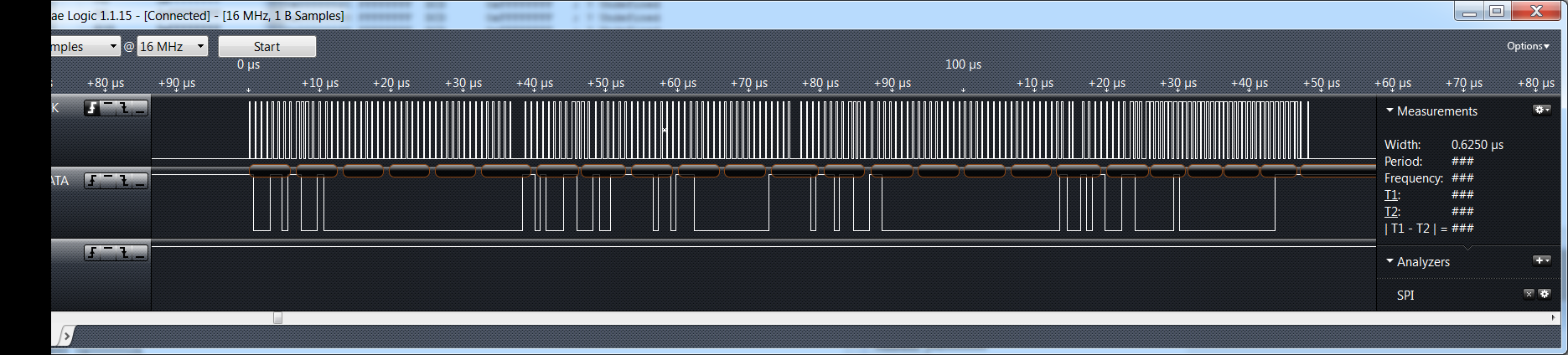
Ich habe es jetzt nochmal mit dem LA versucht. Habe jetzt auf rst getriggert und hatte auch festgestellt, dass ich rst und data vertauscht hatte. Kommt halt davon wenn man das abends vor der Glotze macht. Sieht jedenfalls sinniger aus. Fragt sich nur ob man damit was anfangen kann.
Was ich komisch finde ist, dass man mit dem J-Link bei dem copter nichts reißen kann... Ich hab gedacht der Nu-Link ist auch ein abgespeckter J-Link. Wie z.b die ST-Link und viele mehr.. Oder liegt es an Keil und mit Coocox geht es?
Robert Knipp schrieb: > Sieht jedenfalls sinniger aus. Fragt sich nur ob man damit was anfangen > kann. Na das sieht doch schon deutlich besser aus :) Danke, muss man mal schauen ob das was mit normalen SWD zu tun hat, oder eigenes Zeug ist. Vielleicht hilft ja auch einfach mal nachprogrammieren und den MCU damit vollspammen :D
No y. schrieb: > Was ich komisch finde ist, dass man mit dem J-Link bei dem copter nichts > reißen kann... > > Ich hab gedacht der Nu-Link ist auch ein abgespeckter J-Link. Wie z.b > die ST-Link und viele mehr.. Also soweit ich weiß ist J-Link primär ein JTAG Teil, kann aber auch SWD. Und Keil muss zum löschen seine Löschroutine in den RAM schreiben, und führt diese Routine dann aus, welche den Flash löscht. Der RAM is aber leider ebenso wie der Flash gesperrt. Von daher ist es glaub ich völlig egal mit welchem Teil man da verbindet. Wahrscheinlich macht das ICP Tool wirklich kein normales SWD für das unlocken und löschen. Und das ICP Tool wird eben gleich mal überprüfen, ob da ein Nulink am PC hängt oder nicht.
Robert Knipp schrieb: > Fragt sich nur ob man damit was anfangen > kann. Kann man da eigentlich noch etwas weiter hineinzoomen? Oder geht da nichts mehr? Also in der Software selbst, für die Screenshots
Robert Knipp schrieb: > Ich habe es jetzt nochmal mit dem LA versucht. Habe jetzt auf rst > getriggert und hatte auch festgestellt, dass ich rst und data vertauscht > hatte. Kommt halt davon wenn man das abends vor der Glotze macht. > Sieht jedenfalls sinniger aus. Fragt sich nur ob man damit was anfangen > kann. Das sieht wirklich deutlich sinniger aus :) Verbirgt sich unter dem Menupunkt "Decoder" evtl. etwas, um die Daten in ein verständlicheres Format umzuwandeln? Prinzpipiell könnte ein SPI decoder funktionieren, auch wenn SWD anscheinend nicht immer 8 bit Pakete sendet und Dummyzyklen für die Richtungsumstellung hat.
:
Bearbeitet durch User
Angehängte Dateien:
-

Unbenannt.PNG
47 KB -

Unbenannt2.PNG
47 KB
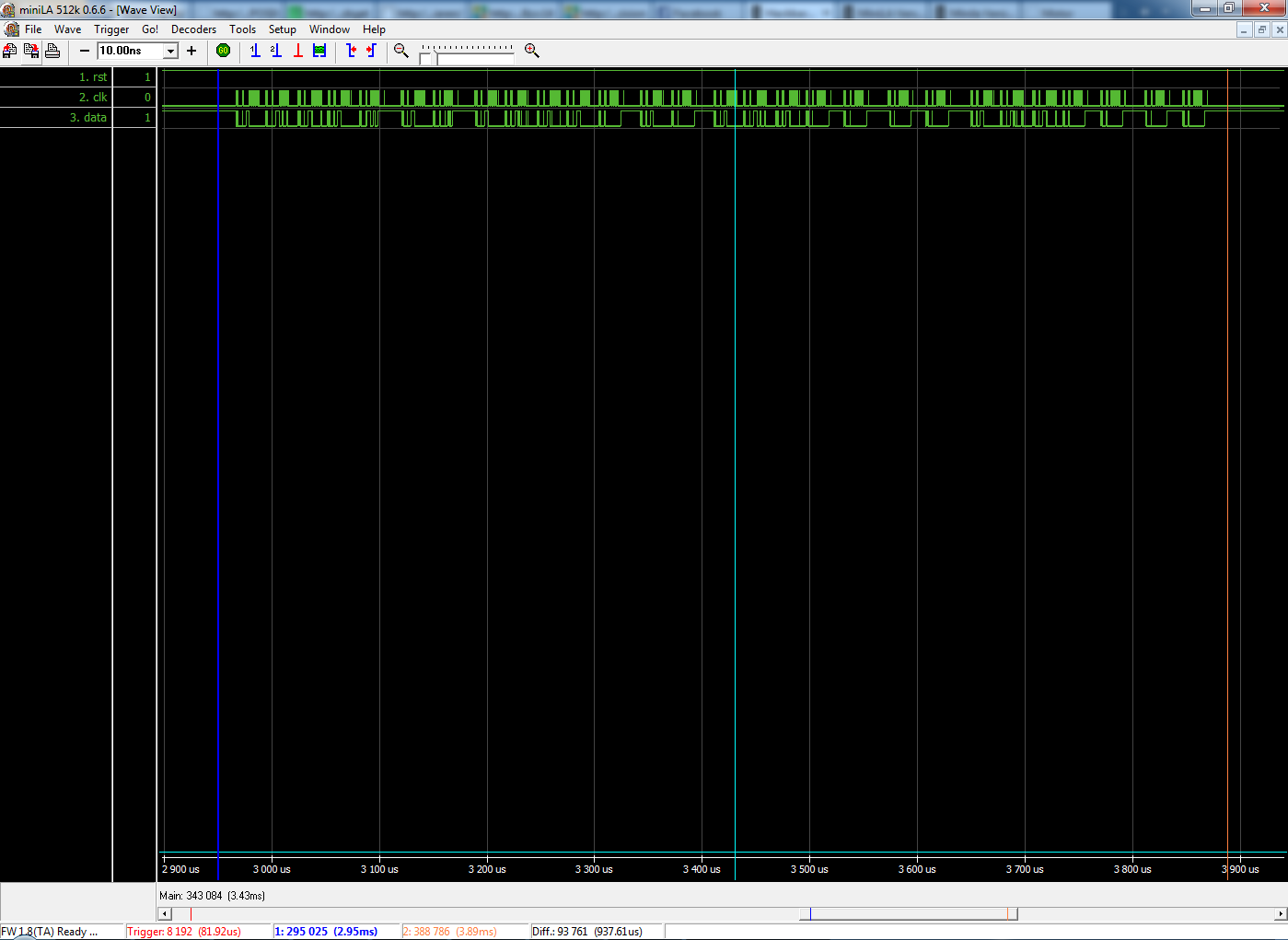
Besser gehts leider nicht.... Das erste is übrigens die linke Seite vom vorigen Bild und das zweite die rechte Seite. Manuel Steiner schrieb: > Vielleicht hilft ja auch einfach mal nachprogrammieren und den MCU damit > vollspammen :D Mal ne dumme Anfängerfrage. Wie bekomme ich denn aus den LA Aufzeichnungen die korrekten Timings für die Signale raus? Die Reihenfolge der 0en und 1en kann man ja leicht erkennen. Aber wie lange müssen die Signale anliegen?
:
Bearbeitet durch User
Das hier könnte interessant sein: http://www.ie.ksu.edu.tw/data/nuvoton/Training%20Material/NuMicro%20Mini51%20Series/2_8NuMicro%20Mini51%20FMC.pdf Auf den höheren Ordnern gibt es noch mehr.. http://newsletter.atxx.de/cms/website.php?id=de/index/atelektronik/atxx/data5357.html Ist hier die .bin Datei nicht die Firmware vom Nulink? Oder hab ich das in der einen Präsentation falsch verstanden? Kann man damit was Anfangen?
:
Bearbeitet durch User
Angehängte Dateien:
-

SPI.PNG
11 KB
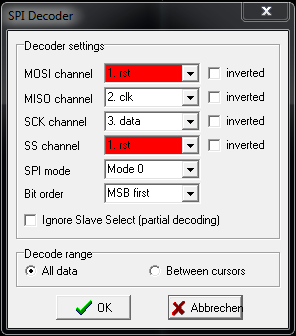
Tim schrieb: > Das sieht wirklich deutlich sinniger aus :) Verbirgt sich unter dem > Menupunkt "Decoder" evtl. etwas, um die Daten in ein verständlicheres > Format umzuwandeln? Prinzpipiell könnte ein SPI decoder funktionieren, > auch wenn SWD anscheinend nicht immer 8 bit Pakete sendet und > Dummyzyklen für die Richtungsumstellung hat. Der Decoder kann auch SPI. Aber was stelle ich da ein? Edit: Ich bekomme da leider keine Einstellung hin die er akzeptiert. Mindestens ein Kanal bleibt immer rot.
:
Bearbeitet durch User
Robert Knipp schrieb: > Aber was stelle ich da ein? "Ignore Slave Select" aktivieren? MISO, MOSI: einen Kanal mit Data, den anderen mit einem freien Kanal belegen; evtl. den unbenutzen auf definiertes Potential legen? Ob SWD und SPI das gleiche Protokoll zu grunde liegt kann ich nicht sagen, d. h. der Dekoder versteht die Botschaften evtl. nicht. Man sieht ja schon einen Unterschied bei den Datenkanälen.
:
Bearbeitet durch User
No y. schrieb: > Ich hab mir einfach noch nen 2. bestellt.. :D lohnt sich glaub mehr... Beim Bestellen darauf achten, dass zwei Motoren links herum drehen und zwei rechts herum!
Georg G. schrieb: > ... zwei Motoren links herum drehen und zwei rechts ... Lustig. :-) Noy meinte einen zweiten Hack-o-copter. Da sind immer zwei links und zwei rechts.
Da Nuvoton ARM- und 8051-Controller herstellt, und ein ARM für die Fernbedienung etwas übertrieben ist, nehme ich an, dass dort eine 8051-Derivat verbaut ist. Nur welches? Die Bezeichnung auf dem Controller lautet: NUVOTON CN2-S20 3118BD293 B118 ZN2DA Suchmaschinen geben nichts her. Wer weiß mehr?
Hat sich mal jemand von den "Cracks" mal die PDFs angeschaut aus dem oben geposteten Link? Bringt das irgendwas? Wie gesagt die höheren Ordner haben noch mehr..
No y. schrieb: > Hat sich mal jemand von den "Cracks" mal die PDFs angeschaut aus dem > oben geposteten Link? Bringt das irgendwas? Wie gesagt die höheren > Ordner haben noch mehr.. Ich hab mir mal die PDFs durchgesehen, aber außern den ISP (serieller Bootloader) Routinen (mit Code) und Speicherlayout usw (welche man auch im Datenblatt findet) wäre mir nicht viel Besonderes aufgefallen. ISP bringt uns leider relativ wenig, da eben alles gesperrt ist und erstmal mit dem ICP Tool entsperrt werden muss. Zu ICP ist nur die übliche Folie mit dem Screenshot vorhanden. Ich bezeichne mich jetzt allerdings nicht als "Crack". Vielleicht ist jemanden anderen ja noch etwas aufgefallen.
Geht ISP ? B15 oder D0 auf GND . Wenn ja braucht man nur rs232/usb. Ansonsten über CooCox und z.B. ST-Link oder OpenJtag/... APROM programmieren.
chris schrieb: > Geht ISP ? B15 oder D0 auf GND . Wenn ja braucht man nur rs232/usb. > Ansonsten über CooCox und z.B. ST-Link oder OpenJtag/... APROM > programmieren. Wie bereits öfter im Thread geschrieben: Nein. Ist gesperrt. Laut Tim ist da zwar irgend etwas für die serielle Schnittstelle am MCU zuständig, reagiert jedoch weder auf manuelle Eingaben noch auf das Nuvoton ISP Tool. Vielleicht ein proprietärer Bootloader Außer unlock und erase über ICP bietet sich im Moment keine Möglichkeit, den MCU mal so weit zu bringen, dass er programmiet werden kann.
Wäre es vielleicht einfacher zu versuchen das ICP Tool anzupassen... Also das auch der J-Link oder der ST-Link ist ja das selbe mit dem ICP läuft?? Bzw. hat es jemand schonmal mit coocox probiert anstatt Keil?
No y. schrieb: > Wäre es vielleicht einfacher zu versuchen das ICP Tool anzupassen... > > Also das auch der J-Link oder der ST-Link ist ja das selbe mit dem ICP > läuft?? > > > Bzw. hat es jemand schonmal mit coocox probiert anstatt Keil? Ja also wenn die Waveform bzw. das Timing für das erase und unlocking bekannt ist, kann man das ja durchaush in ein Discovery Board MCU flashen oder so und damit dann den MCU unlocken und erasen einmalig. Das wird auch gerade probiert. Robert hat dazu auch schon Waveforms gepostet. Die Vermutung liegt nahe, dass Coocox genau so wie Keil eine Löschroutine in den RAM laden muss, um den Flash zu löschen, und das funktioniert ja bekanntlich nicht.
Ja das mit den Waveforms hab ich alles gelesen. Ich meinte aber eher wirklich am PC das ICP Tool austricksen. So dass man das Tool normal benutzt was ja den löschvorgang kann aber mit nem ST-Link. Z.B vielleicht ist die das Tool nur über VID/PID an den Nu-Link gebunden. Sodass man vielleicht dort nur die VID/PID abändern muss oder es steht irgendwo in einer dll oder so drin... Werde es mir mal runterladen und mal schauen was so für dateien dabei sind und ob man etwas findet...
Manuel Steiner schrieb: > Ja also wenn die Waveform bzw. das Timing für das erase und unlocking > bekannt ist, kann man das ja durchaush in ein Discovery Board MCU > flashen oder so und damit dann den MCU unlocken und erasen einmalig. Das > wird auch gerade probiert. Robert hat dazu auch schon Waveforms > gepostet. Um den Bildern etwas entnehmen zu können, muss die Auflösung höher sein. Es dürfte nicht schwierig sein, das Ganze in einen ATTiny oder so zu gießen.
Ich hab leider keinen Nu-Link und noch nicht den 2. Copter hier... Sonst hätte ich es mal versucht mit meinem Saleae oder dem open Bench LS aufzunehmen...:(
No y. schrieb: > So dass > man das Tool normal benutzt was ja den löschvorgang kann aber mit nem > ST-Link. Ich schätze mal schon, dass das ICP Tool da mit dem Nulink ein wenig kommuniziert und das Nulink seinen Teil dazu beträgt, dass das löschen dann funktioniert. Also ich will darauf hinaus, dass das ICP Tool wahrscheinlich nicht genau so mit einem ST Link kommunizieren kann wie mit einem Nulink. Aber ich finde den Ansatz an sich nicht schlecht, vielleicht findet man ja wirklich etwas.
Mors ultima schrieb: > Es dürfte nicht schwierig sein, das Ganze in einen ATTiny oder so zu > gießen. Muss ja nicht unbedingt ein Atmel Teil sein, kann ja auch ein MCU auf einem Discovery sein. Aber die Aufläsung muss tatsächlich höher sein, um da etwas zu erkennen. Den Open Bench LS hab ich auch hier liegen, aber auch noch keinen Nulink.
Hat eigentlich jemand schonmal in so einen Nu-Link reingeschaut, ob da viel mehr als ein µC und die Spannungsversorgung/schutz drin ist? Sonst kann man vielleicht irgendwo die Firmware des Nu-Link finden. Optimalerweise als Source Code.. Als .bin findet man die ja im Netz...
:
Bearbeitet durch User
Ich hab ja wie bereits mal geschrieben im Nuvoton Forum gefragt, ob die mir mehr über ICP erase sagen können ... Wollten aber wie erwartet nichts rausrücken.
So hab meinen Quad jetzt doch mal an meinen J-Link drangemacht... In JFlash Connected er auch. Aber auslesen geht nicht bzw. es kommt eine Fehlermeldung... Muss mir da nochmal die Configuration anschauen.. Bei JFlash kann ich auch einzelne Adressen angeben wo etwas hingeschribene werden soll... Kann ich jetzt nicht einfach die Adresse des LockBit angeben und da mal ne 0 bzw 1 reinschreieben?? Weiß jemand gerade welche Adresse da beschriben werden muss und mit was?
Im Datenblatt Seite 74 steht doch was gemacht werden muss um den Chip zu unlocken.. Oder versteh ich da was falsch?
No y. schrieb: > Im Datenblatt Seite 74 steht doch was gemacht werden muss um den Chip zu > unlocken.. > > Oder versteh ich da was falsch? Mein Datenblatt hat nur 68 Seiten!?
No y. schrieb: > Im Datenblatt Seite 74 steht doch was gemacht werden muss um den Chip zu > unlocken.. Du kannst, durch das Schreiben von 0x59, 0x16, 0x88 auf die Adresse 0x5000_0100, die Register freigeben. Das Problem, das du dann hast ist, dass du mittels ISP den Chip nicht löschen kannst (siehe Seite 139).
Hm geht nix... bzw. wenn ich erasen will meckert Jflash das ich keine Lizenz hab... Hab ich ja auch net mim EDU...
Ich muss mich mal reinlesen... Den Unterschied zwischen ISP und ICP kenne ich bisher nicht. Wie gesagt komme von PICs bisher... Da gibts ICSP beim Pickit.
No y. schrieb: > ICSP beim Pickit. Praktisch, das ist dann ja wohl eine Kombination aus beiden :) Beim MINI54ZAN: ISP= Flashen über den potentiell eingebauten Bootloader und die serielle Schnittstelle. ICP= Flashen über SWD. So wie ich es verstehe kann ein gesperrter Controller nur über ICP entsperrt werden.
Tim schrieb: > ICP= Flashen über SWD. So wie ich es verstehe kann ein gesperrter > Controller nur über ICP entsperrt werden. Genau so verstehe ich das auch
Ich habe mir jetzt gerade mal Keil MDK 5 runtergeladen und wollte ein neues Projekt anlegen. Ich kann als Target aber nicht nuvoton auswählen... Es gibt nur ARM und STM32... Wenn ich dann aber auf File/Device Database gehe ist alles drin... Versteh ich nicht... Vor allem versteh ich auch die Einstellungen bei meinem J-Link GDB Server Config file nicht... Z.B welchen Controller muss ich denn auswählen es gibt nur 4 mal Mini54LAN statt ZAN aber dürfte der gleiche sein oder? Vor allem warum 3 mal??
No y. schrieb: > Ich kann als Target aber nicht nuvoton auswählen... Es gibt nur ARM und > STM32... Schau mal hier: Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter"
Der zweite (von meinem Sohn) ist heute angekommen, am 13.10.2013 bei
ebay 190881964364 bestellt.
Inzwischen fliegt mein Sohn ("Pilot Jonas") viel besser als ich.
Außerdem kamen die Akkus an,
http://www.aliexpress.com/snapshot/278000072.html.
Marius S. schrieb:
> Mein Quadcopter schaltet sich immernoch ab und zu einfach schlagartig
> aus.
Als Jonas flog, haben wir was beobachtet: Mit den größeren Akkus
funktioniert auch die "Low-Batt-Anzeige". Die LEDs beginnen erst langsam
zu blinken, dann schneller, erst dann läßt die Motorleistung nach.
@Tim: Ist Dein Bu-Link schon da? Wenn der gehnt, bestelle ich auch
einen. Ich hab' ja nun auch einen zum "kaputtflashen".
:
Bearbeitet durch User
Mors ultima schrieb: > Manuel Steiner schrieb: > >> Ja also wenn die Waveform bzw. das Timing für das erase und unlocking >> bekannt ist, kann man das ja durchaush in ein Discovery Board MCU >> flashen oder so und damit dann den MCU unlocken und erasen einmalig. Das >> wird auch gerade probiert. Robert hat dazu auch schon Waveforms >> gepostet. > > Um den Bildern etwas entnehmen zu können, muss die Auflösung höher sein. > Es dürfte nicht schwierig sein, das Ganze in einen ATTiny oder so zu > gießen. Auf nen Screenshot bekomme ich leider nicht mehr drauf. Aber die Datei im Anhang kann man in der MiniLA Anwendung öffnen. Den Link gibts im Artikel zum LA: http://www.mikrocontroller.net/articles/Minila_Version_MockUp Damit könntet Ihr Euch das genauer anschauen. Vielleicht kann man ja auch die .vcd Datei in einer anderen LA Anwendung öffnen.
Angehängte Dateien:
-

lader.png
1,5 KB
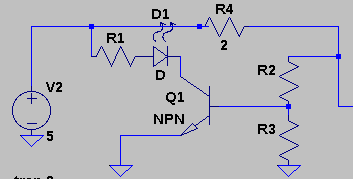
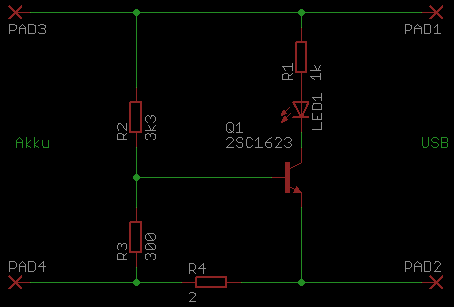
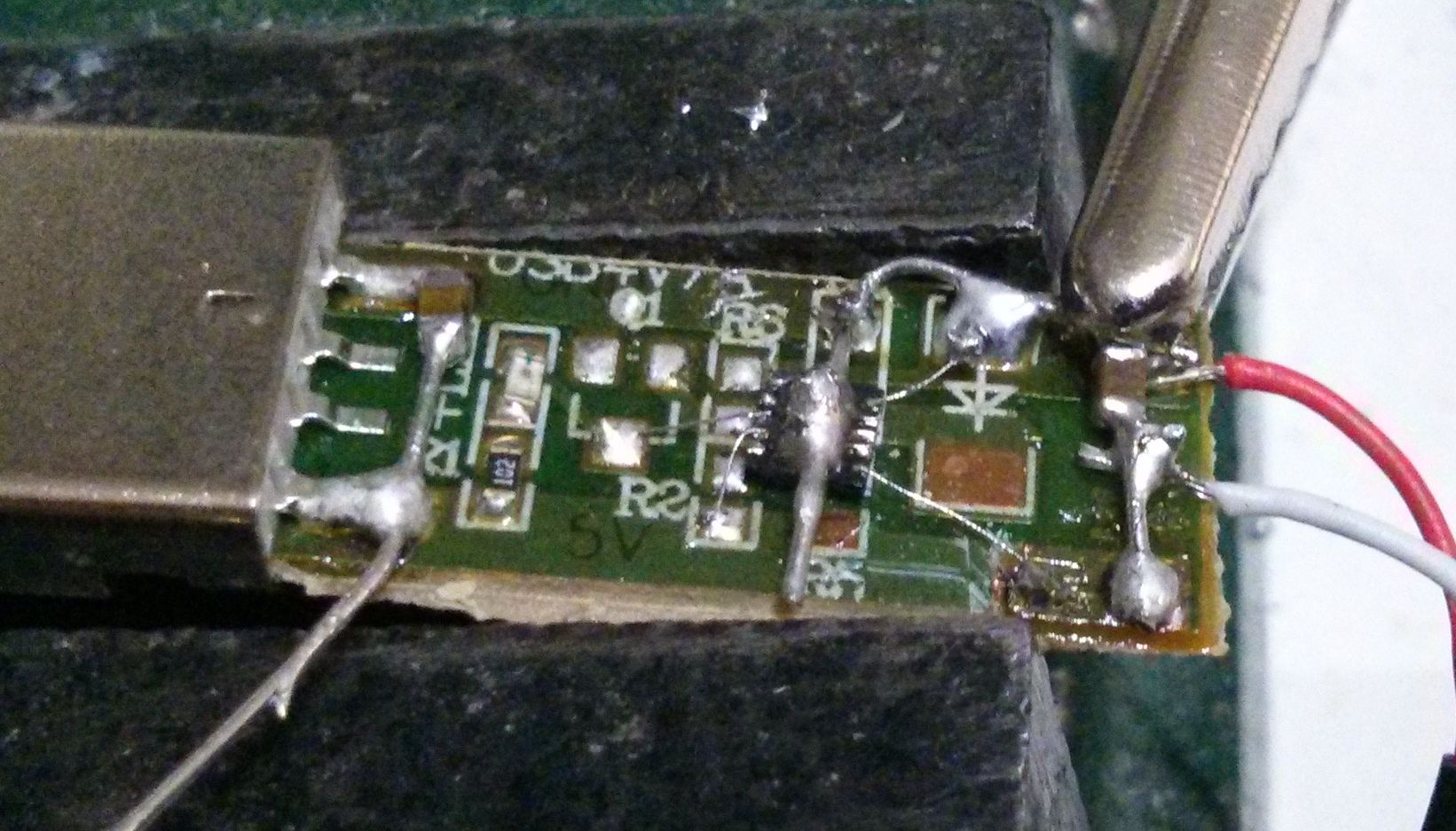
Ich hab das "Ladegerät" gestern an ein älteres USB-Handynetzteil, das eher 6V als 5V hat, gehängt und dabei ist mir das Ladegerät geschmolzen. Ich habs mal aufgemacht, im Anhang der Schaltplan, nur der 2-Ohm-Widerstand ist gemessen. Transistor ist geraten, ist ein SOT-23, beschriftet mit L6. Am 6V-Netzteil lädt das ding mit 400+mA, am 5V-Netzteil mit 260mA. Das Gehäuse des Ladegeräts wird auch mit 5V bei mir warm.
hubsi schrieb: > … das eher 6V als 5V hat Ich habe bisher "blind vertraut", aber nun auch mal nachgemessen: Bei 4,32V geht die rote Lade-Lampe aus und die Akku-Spannung geht auf 5,05V hoch . Ich habe das Verhalten bei beiden Ladegeräten. Ich denke, diese "Ladegeräte" sollte man keinesfalls verwenden.
Torsten C. schrieb: > Bei > 4,32V geht die rote Lade-Lampe aus und die Akku-Spannung geht auf 5,05V > hoch . Diese Aussage passt nicht zu dem publizierten Schaltbild. Da leuchtet die LED wird immer, relativ unabhängig von der Akkuspannung.
Angehängte Dateien:
-

Dsc_6191.jpg
25 KB -

Dsc_6192.jpg
27 KB -

Dsc_6189.jpg
87 KB


hubsi schrieb: > Und genau dabei kann es auch die Achse durch den Motor nach unten > drücken, dann brauchst du einen neuen Motor. "Pilot Jonas" hat deshalb auf seinen einen Schaumstoff-Klotz geklebt, der wiegt genau 1,0g. Anbei ein Foto des "Ladegeräts". Ich beobachte das Verhalten und die Spannungen nochmal weiter ...
Georg G. schrieb: > Diese Aussage passt nicht zu dem publizierten Schaltbild. Da leuchtet > die LED wird immer, relativ unabhängig von der Akkuspannung. Ich hab vergessen dazu zuschreiben, dass ich den Schaltplan abgepinselt habe, und er daher Fehler enthalten kann.
Georg G. schrieb: > Diese Aussage passt nicht zu dem publizierten Schaltbild. Oder das Schaltbild passt nicht zur Aussage. Ich denke, das ist ein PNP und die "LED-Aus-Spannung" wird von der Vorwärtsspannung der LED gegen die 5V bestimmt. Bei 6V ist auch die "LED-Aus-Spannung" entsprechend höher. Von einer "Ladeschlusspannung" kann nicht die Rede sein. 5..6V machen jeden LiPo-Akku kaputt. Wahrscheinlich hätten die Chinamänner die Diode (links auf Dsc_6189.jpg) bestücken sollen.
Hallo Leute, ein sehr interessanter Thread, ich habe auch einen Quadrocopter, zwar etwas größer aber mit den gleichen Chips. Ich möchte etwas zum 'Laderegler' beitragen. Der verwendete Transistor hat die Kennung 'L6', ist also ein 2SC1623, NPN, Ic=100mA, hFE=200..400 Von einem Laderegler mag ich bei dem Schaltbild gar nicht sprechen, es findet keine Regelung statt. R4 begrenzt lediglich den Ladestrom, eine Ladestromabschaltung erfolgt nicht. Bei einem 6V Netzteil und leerem Accu mußte R4 mehr als 3W Leistung verbraten, ich glaube im Dunkeln hätte er geleuchtet. Nach Schaltbild leuchtet D1 bei erreichen einer bestimmten Spannung am Spannungsteiler R2 / R3 Wie Torsten C. schon schreibt passt das Schaltbild nicht zu einer erlöschenden LED Aus 'Dsc_6189.jpg' kann ich aber auch nicht wirklich was Anderes erkennen. Ist da vielleicht noch was auf der Rückseite? Aber letzlich ist das auch egal. Auf jeden Fall ist dieser Ladeadapter ein Accu schädigendes Teil.
Angehängte Dateien:
-

ladeanzeige.png
1,8 KB
Ich habe selbst nochmal den Ladestecker geöffnet und selbst mal nachgeschaut. Im Anhang der Schaltplan, wie er bestückt ist. Vorgesehen sind weiterhin ein Widerstand parallel zum Akku und eine Diode in Reihe zum 2 Ohm Shunt.
Wo schrieb: > ist also ein 2SC1623 Warum kann das z.B. kein BSS69R sein? Der wäre PNP. Geht die LED bei Euch aus oder an? Bei mir geht sie aus, wenn der Akku voll ist. PS: Ich bae zum Glück noch einen Walkera Lama2. Da war ein ordentliches Ladegerät dabei und der Steker passt! :-p ;-)
:
Bearbeitet durch User
Was wäre denn eine gute Alternativschaltung mit leicht verfügbaren Bauelementen? Man könnte ja das bestehende Ladegerät schlachten und eine eigene Platinen im gleichen Format einsetzen?
Chris L. schrieb: > Im Anhang der Schaltplan, wie er bestückt ist. So macht er Sinn. Die LED geht aus, wenn der Ladestrom unter einen festen Wert sinkt (etwa 170mA bei 4.2V am Akku als erste Näherung).
Angehängte Dateien:
-

debug.png
80 KB
Ich habe mal mit einem Saleae Logicanalyer den Datanverkehr vom ST-Link mitgeschrieben. Einmal für den Start einer Debug-Session und einmal für eine versuchte "Erase"-Operation. Beides erzeugt eine Unmenge an Daten, die sich ohne Protokollanalyzer kaum untersuchen lassen. Files anbei, sie lassen sich mit "Logic" anschauen. Bleibt zu hoffen, dass der Chip-Erase wirklich so einfach ist. Ich werde einfach mal weiter auf den "Bu-Link" warten. Wenn er wirklich funktioniert, gibt es kaum einen Anlass, eine Alternativlösung zu entwickeln. (http://www.aliexpress.com/item/Free-Shipping-NuLink-BuLink-Compatible-Cortex-M0-M051-ISP-ICP-Program/674565728.html)
Chris L. schrieb: > ladeanzeige.png Ist ja gruselig. Das kann man doch nicht als Ladegerät bezeichnen. Ich habe hier noch einen MAX1551, den werde ich mal da rein pflanzen.
Marius S. schrieb: > Ist ja gruselig. Das kann man doch nicht als Ladegerät bezeichnen. Du musst das aus Sicht eines Kindes sehen (der Copter wird als Spielzeug angeboten): Das Kind will spielen. Leider ist bald der Akku leer. Also wird geladen und laufend auf die LED geschaut, ob er schon voll ist. Überladen also fast unmöglich. Und wenn dann die Lust am Fliegen für heute vorbei ist, wird der Kram entladen zurück gelegt. Du musst das mehr aus Sicht eines BWLers sehen, weniger als Techniker.
>> ist also ein 2SC1623 > Warum kann das z.B. kein BSS69R sein? Der wäre PNP. Weil ich keine PNP Transistoren mag, die waren immer so schwer zu beschaffen. Aber Spaß beiseite. Ich war tatsächlich bis vor wenigen Minuten der Meinung daß sich aus der Kennung der Transistor genau bestimmen läßt. Nun bin ich zu der Erkenntnis gekommen - die Kennung ist ohne original Schaltbild völlig nutzlos. Wenn Torsten C. einen PNP einsetzt und die LED tut was sie soll dann hat das Rätselraten wohl ein Ende. @ Chris L: Der Transistortype 2SC1623 kann nicht stimmen, ich hab mich da geirrt, mit dem von Torsten C. angenommenen PNP Transistor paßt das am Besten.
Angehängte Dateien:
-

ladeanzeige_pnp.png
1,8 KB
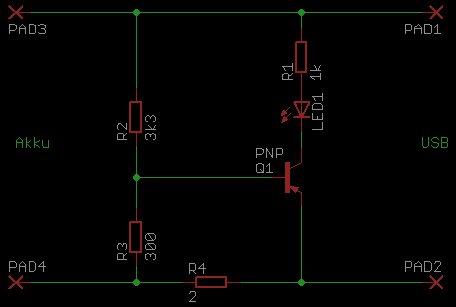
Wo schrieb: > @ Chris L: Der Transistortype 2SC1623 kann nicht stimmen, ich hab mich > da geirrt, mit dem von Torsten C. angenommenen PNP Transistor paßt das > am Besten. In diesem Fall sähe der Schaltplan folgndermaßen aus
Chris L. schrieb: > In diesem Fall sähe der Schaltplan folgndermaßen aus Wie herum sind denn die Polaritäten der Anschlüsse?
Chris L. schrieb: > In diesem Fall sähe der Schaltplan folgndermaßen aus wobei die LED nie leuchten würde :-)
Das die nicht leuchten würde ist mir klar. Aber im Schaltplan von Hubsi sind die Polaritäten komplett vertauscht. Das stimmt nicht mit dem Aufdruck auf meiner Platine überein. (Bei mir liegt der Shunt zum Beispiel in der Minusleiterbahn, auch auf der Platine ist dies so) Oben und Plus und unten ist Minus. Beim Transistor ist oben Collector und unten Emitter, das habe ich gemäß datenblatt du ermittelt.
Wenn "ladeanzeige.png" stimmt, ist es NPN. PNP hätte bei Hubsis Plan Sinn gemacht. Mann, was soll das erst werden, wenn wir uns über Flugstabiliserungs-Regelalgorizhmen unterhalten? Naja, im Moment überbrücken wie ja die Zeit, bis Tim den Bu-Link getestet hat.
Angehängte Dateien:
-

USB-Lader.gif
45 KB
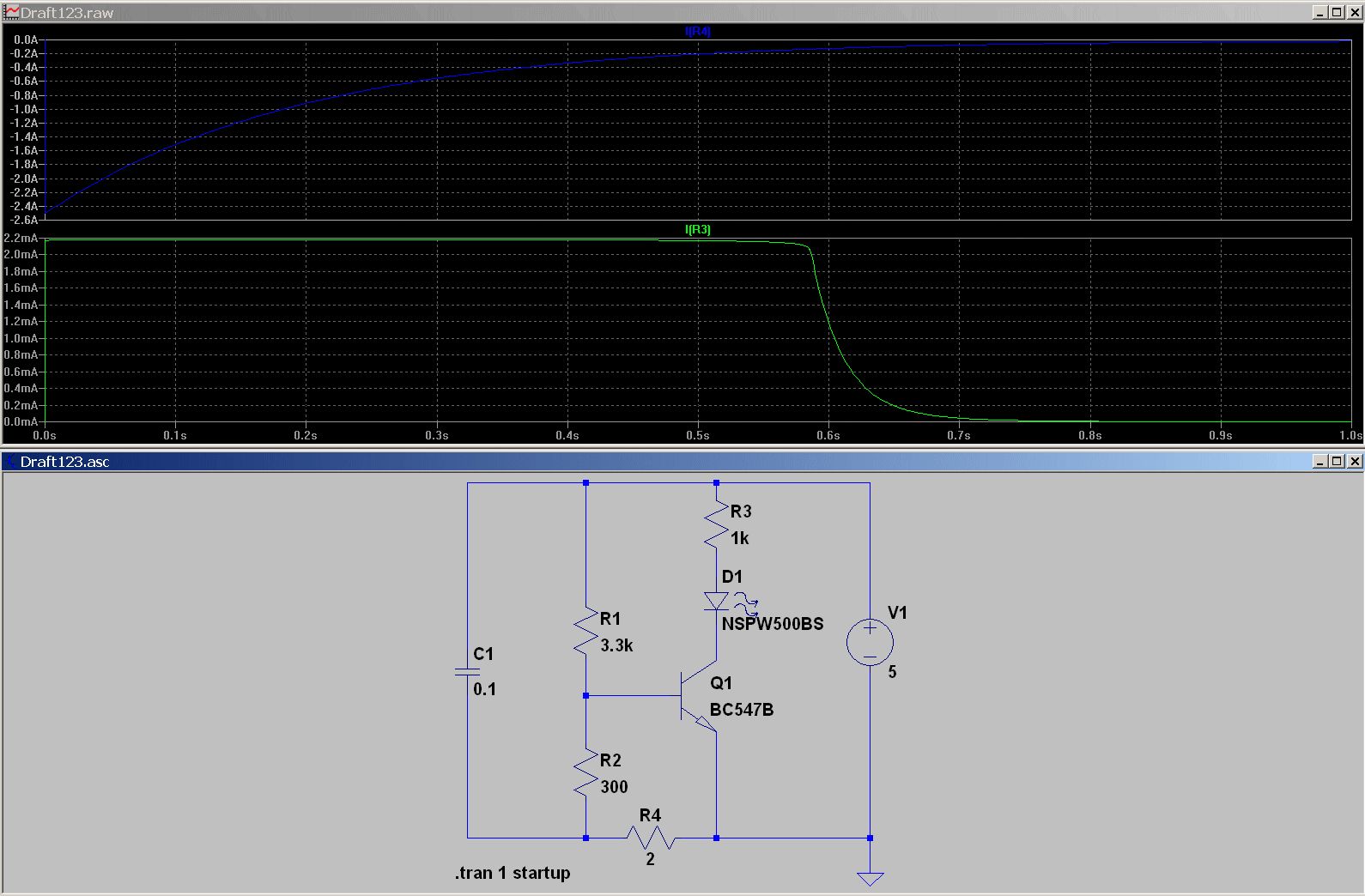
Georg G. schrieb: > Chris L. schrieb: >> In diesem Fall sähe der Schaltplan folgndermaßen aus > > wobei die LED nie leuchten würde :-) Einfach einmal ausprobieren: die leuchtet auf mit dem PNP. Es ist ein NPN in der Schaltung, da so die Schaltung wie beobachtbar "funktioniert" (siehe Anhang). LED-Strom: grün Akku.Strom: blau
da ich keine Lust hatte, den transistor auszulöten und an den Komponententester anzuschließen, habe ich mit dem Diodentest meine Multimeters mal gemassen. Ich konnte zwei dioden messen, die beide an Basis ihre Anode haben. Also ein NPN-Transistor [EDIT]Danke Davis, ich wollt auch grad anfangen, das ganze mal durch den Simulator zu jagen
:
Bearbeitet durch User
Das kann doch alles nicht war sein ... ich glaub das Teil veralbert uns :-)
Davis schrieb: > Einfach einmal ausprobieren: die leuchtet auf mit dem PNP. Kannst du das bitte etwas näher erläutern? Zwei Möglichkeiten: 1.) oben ist PLUS. Dann wäre die LED in Flussrichtung und könnte leuchten - was aber durch die in Sperrrichtung liegende Collector-Basis-Strecke des PNP verhindert wird. 2.) oben ist MINUS. Nun könnte der Transistor leitend werden. Aber dummerweise ist die LED nun in Sperrrichtung. Also auch dunkel.
Georg G. schrieb: > Davis schrieb: >> Einfach einmal ausprobieren: die leuchtet auf mit dem PNP. > > Kannst du das bitte etwas näher erläutern? 1. Fall (Emitter -> GND, Kollektor -> LED). Der Strom fließt durch die LED und vom Kollektor über die Basis nach GND. 2. Fall (Kollektor -> GND, Emitter -> LED). Der Strom fließt durch die LED und vom Emitter über die Basis nach GND. Beide Fälle lassen sich leicht auf dem Steckbrett überprüfen.
Es kam wie es kommen musste. Meiner liegt auf Nachbars Garagendach. Mit dem Kopf nach unten. Heul...
Wo schrieb: > Auf jeden Fall ist dieser Ladeadapter ein Accu > schädigendes Teil. Hmmm, bist Du da sicher? Ich hatte zwischen Aldi-Ladegerät mit USB-Steckdose (und Ladeschächten für alle üblichen NiMH-Rundzellen und 9V-Blöcke) und dem mitgelieferten USB-Lader einen USB-Strom/Spannungs-Tester geschaltet: http://www.ebay.de/itm/USB-Power-Current-and-Voltage-Tester-USB-Mobile-Power-Current-Test-HS-/221244340179 Dieser zeigte während des Ladens (bei leuchtender LED) um die 400 mA an, nach dem Laden bei erloschener LED 0 mA. Das sagt mir, dass der Lader den Ladestrom sauber abschaltet. Die Eingangsspannung war 5,0 V und brach während des Ladens nur gering ein. ...
Torsten S. schrieb: > Meiner liegt auf Nachbars Garagendach. Mit > dem Kopf nach unten. Da muss dann wohl der Berge-Copter ran... 8-( Käffchen? ...
Torsten S. schrieb: > Es kam wie es kommen musste. Meiner liegt auf Nachbars Garagendach. Mit > dem Kopf nach unten. > > Heul... Ich fühle mit dir ... Meiner könnt dann auch endlich mal ankommen hier, ist ja kaum auszuhalten.
:
Bearbeitet durch User
Seit Ihr Euch ganz sicher daß das Schaltbild korrekt ist? Unabhängig vom Transistor. Ich beziehe mich jetzt mal auf das 'ladeanzeige_pnp.png' von Chris L. Ich habe einen etwas anderen Ladeadapter, aber genau so sparsam aufgebaut. Bei dem hängt der Transistor mit einem Bein zwischen LED1 und R1, LED1 entsprechend direkt an Minus. Eventuell mal durchklingeln (den Ausdruck kennt Ihr wohl garnicht :-) ) um bei den Vebindungen sicher zu gehen.
Hannes Lux schrieb: > Torsten S. schrieb: >> Meiner liegt auf Nachbars Garagendach. Mit >> dem Kopf nach unten. > > Da muss dann wohl der Berge-Copter ran... 8-( > > Käffchen? > > ... Na klar, aber wie immer ;)
Wo schrieb: > Seit Ihr Euch ganz sicher daß das Schaltbild korrekt ist? Unabhängig vom > Transistor. > > Ich beziehe mich jetzt mal auf das 'ladeanzeige_pnp.png' von Chris L. > > Ich habe einen etwas anderen Ladeadapter, aber genau so sparsam > aufgebaut. Bei dem hängt der Transistor mit einem Bein zwischen LED1 und > R1, LED1 entsprechend direkt an Minus. Dann geht deine LED nach dem Ladeschluss an. Beide Varianten der Schaltung sind gleich "gut".
Hannes Lux schrieb: > Hmmm, bist Du da sicher Ja. Nach 'ladeanzeige_pnp.png' von Chris L. und meinem etwas anderen Adapter gibt es nicht was die Verbindung zum Accu trennt, der Transistor kann es nicht, egal welcher Typ. Wenn ab einer bestimmten Spannung tatsächlich kein Strom mehr fließt kann das nur bedeuten das der Accu selber abschaltet (eigene Elektronik). Das würde auch die Funktionsweise der LED erklähren. Eine ander Erklährung habe ich derzeit nicht.
Angehängte Dateien:
-

LiPO--charger-circuit.png
5,4 KB
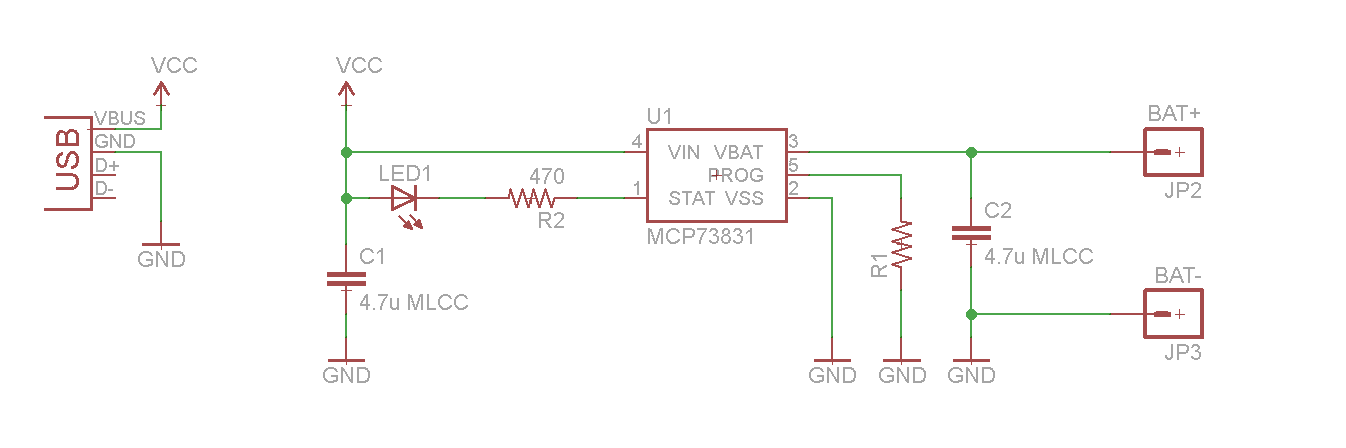
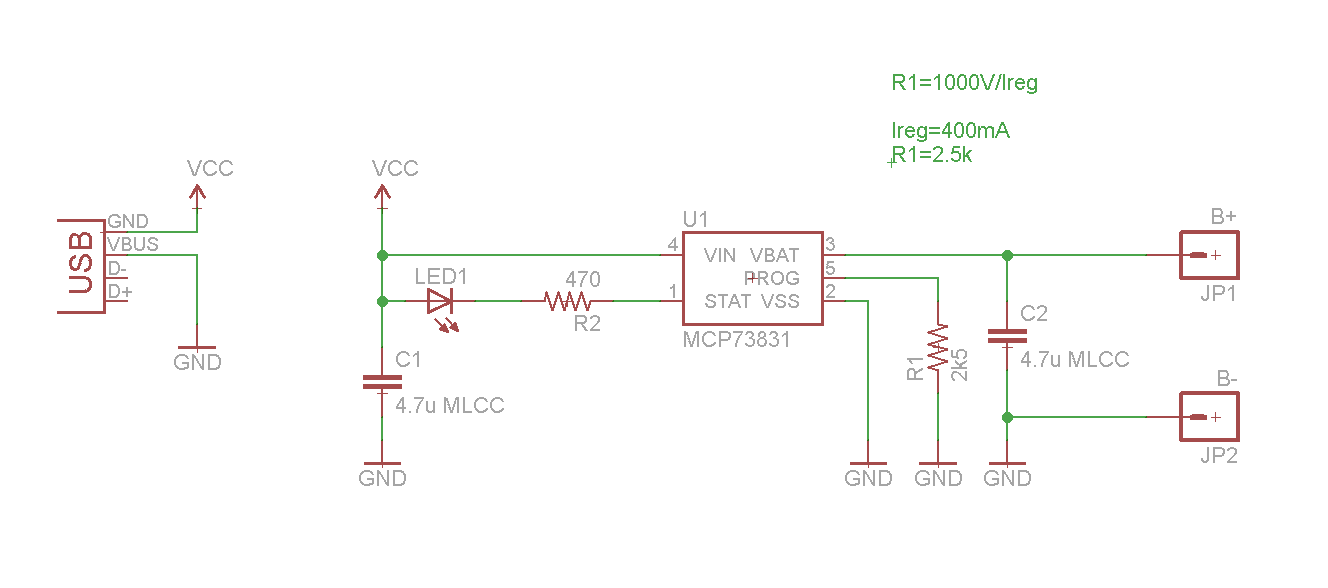
Ich habe mich einfach mal 'dran gemacht, ein neues Innenleben für das Ladegerät zu designen. Ich habe mich dabei für den MCP73831 entschieden, da er recht günstig zu haben ist. Anbei schon einmal die Schaltung. Beim Layout kämpfe ich noch mit dem USB-Stecker, da er in dem Ladegerät recht merkwürdig installiert ist. Eine Frage: Was verträgt der Akku denn für einen Ladestrom? Dieser kann über R1 eingestellt werden.
:
Bearbeitet durch User
Die kleinen Akkus haben eine Kapazität von 240 mAh, der Ladefaktor liegt bei 1,4 und die Ladezeit der mitgelieferten USB-Lader bei 45 Minuten. Das wären dann rund 450 mA.
Angehängte Dateien:
-

LiPo-Circuit.png
6,2 KB -

LiPo-PCB-Singleside.png
16 KB -

LiPo-PCB-Doubleside.png
11 KB
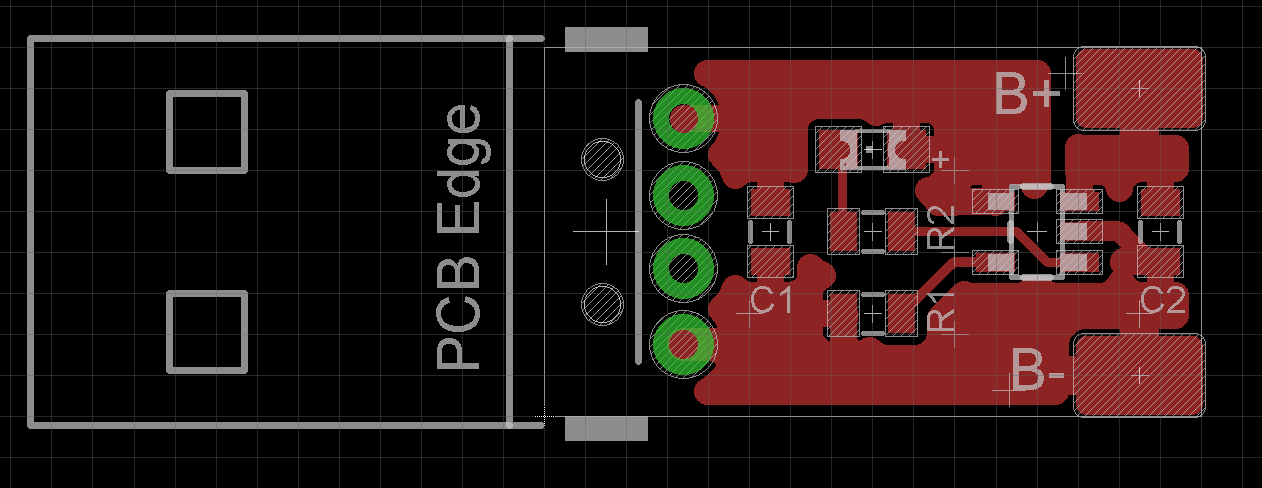
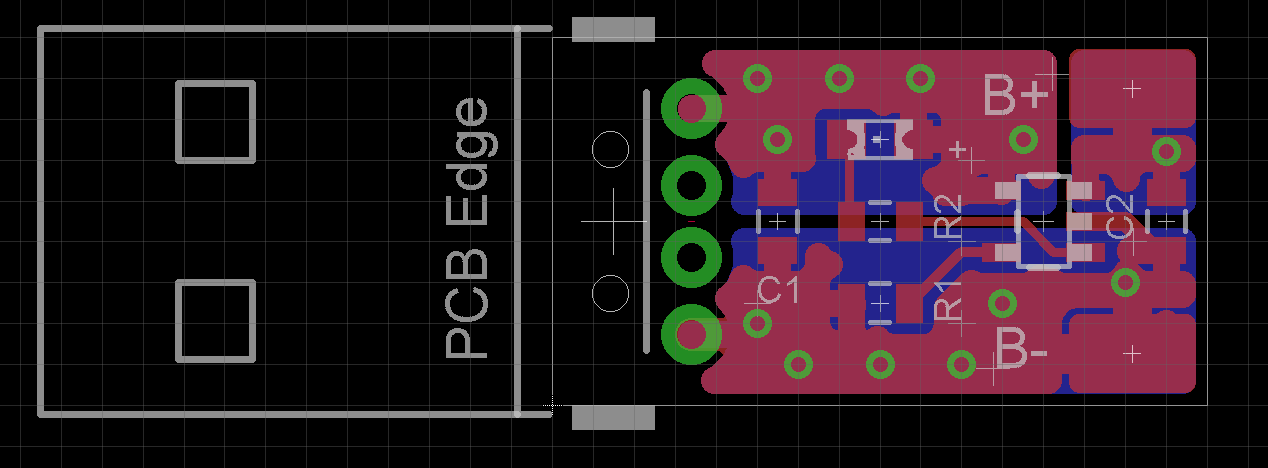
Platinen dauern doch immer länger als man denkt. Anbei das Platinenlayout für den Ersatz-LiPo Charger. Die Platine ist etwas kleiner als das Original und sollte in das gleiche Gehäuse passen. Es gibt eine einsetige Version und eine Zweiseitige, bei der, wie im Datenblatt vorgeschlagen, die Rückseite zur Wärmeableitung dient. Gibt es noch Ideen? Würde ansonsten Teile für ein paar Prototypen ordern... Alle relevanten Dateien liegen im Repository: https://github.com/hackocopter/LiPoCharger
Davis schrieb: > Die kleinen Akkus haben eine Kapazität von 240 mAh, der Ladefaktor liegt > bei 1,4 und die Ladezeit der mitgelieferten USB-Lader bei 45 Minuten. > > Das wären dann rund 450 mA. Danke! Ich habe den Ladestrom auf nominell 400mA gesetzt. (R1=2.5 kOhm)
Angehängte Dateien:
-

_copter_li2.jpg
240 KB
Ich habe das Ladegerät wie im Anhang gezeigt modifiziert. Das lädt so mit knapp 100mA, dauert zwar länger als mit dem Original, aber lädt nur bis 4,2V.
Omega G. schrieb: > Ich habe das Ladegerät wie im Anhang gezeigt modifiziert. Das lädt so > mit knapp 100mA, dauert zwar länger als mit dem Original, aber lädt nur > bis 4,2V. Schick! Was ist das für ein IC?
Sooo... Ich hab's mal ausprobiert, der Accu schaltet selber ab. Ich hab ihn über Ladeadapter und auch direkt am Netgerät geladen. Die Abschaltspannung lag zwischen 4,5V und 4,9V abhängig vom Ladestrom. Das ist mit Sicherheit keine Spannungsabschaltung sondern eher eine Temperaturabschaltung. Gute Nacht
Der Akku schaltet selbstständig ab? Würde mich wundern, wenn da noch eine Elektronik drin versteckt ist...
erweitern mit zb. gps ;kamera ;bluetooth ;drucksensor ;kompass ; nicht alles aber was würde machbar sein nach deinem kenntnis stand
Noobi schrieb: > erweitern mit zb. gps ;kamera ;bluetooth ;drucksensor ;kompass ; nicht > alles aber was würde machbar sein nach deinem kenntnis stand Naja da serielle Schnittstelle und auch glaube I2C herausgeführt sind, und man eine eigene Firmware dafür schreibt wohl ziemlich viel. Die Grenze wird wohl eher das Gewicht sein. Ich meinte hier im Thread gelesen zu haben, dass hier das Limit bei 30g oder so liegt.
I2C ok aber hängt der nicht am gyro ? leiterbahn durchtrennen oder wie ?
Marius S. schrieb: > wenn da noch > eine Elektronik drin versteckt ist... Er schaltet ab, für den Ladeadapter oder das Netzgerät stellt sich das als Lastabwurf dar, von Elektronik habe ich nichts geschrieben.
Noobi schrieb: > I2C ok aber hängt der nicht am gyro ? leiterbahn durchtrennen oder wie ? Man kann dahinter noch weiter I2C Teile hängen. I2C ist ja ein Bussystem und das MPU6050 kann selbst für einen Subbus als Master agieren und die Daten von angehängten anderen I2C Geräten weitergeben, soweit ich das verstanden habe.
Noobi schrieb: > ja ok aber daran löten wird schwierig ,wo ? Ich würde bei den I2C Leiterbahnen kurz vor dem Gyro etwas den Lack (bzw. Silkscreen) runter kratzen und verzinnen. Danach das ganze mit etwas Kleber versiegeln.
Noobi schrieb: > ja ok aber daran löten wird schwierig ,wo ? Man kann sich ja ein einges PCB machen wo man alles anschließt, was man so haben möchte und ein mal I2C zum Haupt PCB führt. Die 2 Pins wird man schon wo anlöten können. Oder einfach parallel als I2C an den MCU hänten, jedes Slave Gerät hat ja sowieso eine eindeutige Adresse. Edit: Zu langsam. Danke nosilent :)
:
Bearbeitet durch User
Der Controller scheint auch noch einige freie Pins zu haben. Da sollte sich auch noch Peripherie anschließen lassen.
soweit hab ich auch schon gedacht, löten kann ich gut aber viel platzt ist da nicht wenn da etwas lötzinn wegläuft . vorverzinnen ok ja wird schon klappen :D
Noobi schrieb: > was würde machbar sein Alles bis max. ca. 20 Gramm, bei mehr hebt er vielleicht noch ab, aber Flugzeit und Agilität wären dann irgendwann zu schlecht. Wir hatten weiter oben schon mal ein Brainstorming. Noobi schrieb: > zb. gps; ja, s.o. > kamera; ja, s.o. > bluetooth; ja, s.o. > drucksensor; ja, s.o., bringt aber bei DGPS nichts mehr. > kompass; wozu? Ginge aber auch. Der MPU-9150 ist z.B. fast SW- und Pinkompatibel zum MPU-6050. Manuel Steiner schrieb: > das MPU6050 kann selbst für einen Subbus als Master agieren Ja, aber das hat gegenüber "direkt anschließen" keine Vorteile, außer (1) man bekommt die "Motion Processing Unit" zum Laufen. Das ist für uns aber vermutlich 'ne Nummer zu hoch. Es würde mich natürlich freuen, wenn ich mich irre. Oder (2), man hat zwei Sensoren mit der gleichen Slave-Adresse.
:
Bearbeitet durch User
Torsten C. schrieb: > ja, s.o. >> drucksensor; > ja, s.o., bringt aber bei DGPS nichts mehr. >> kompass; > wozu? Ginge aber auch. Der MPU-9150 ist z.B. fast SW- und Pinkompatibel > zum MPU-6050. Das bringt alles etwas mit den richtigen Sensor-Fusion Algorithmen. Anbei mal ein paar Paper dazu. Hier einfach mal zur Dokumentation. Das ist aber ein Thema für sehr sehr viel später, und evtl. auch eher für einen professionelleren Copter mit mehr Rechenleistung. :) http://en.wikipedia.org/wiki/Sensor_fusion Wenn die Gyro/Acellerometer Fusion mit dem MPU6050 DMP richtig funktioniert ist das schon ein Riesenschritt.
Angehängte Dateien:
-

pcb-front_annotated.jpg
170 KB -

pcb-rear_annotated.jpg
140 KB
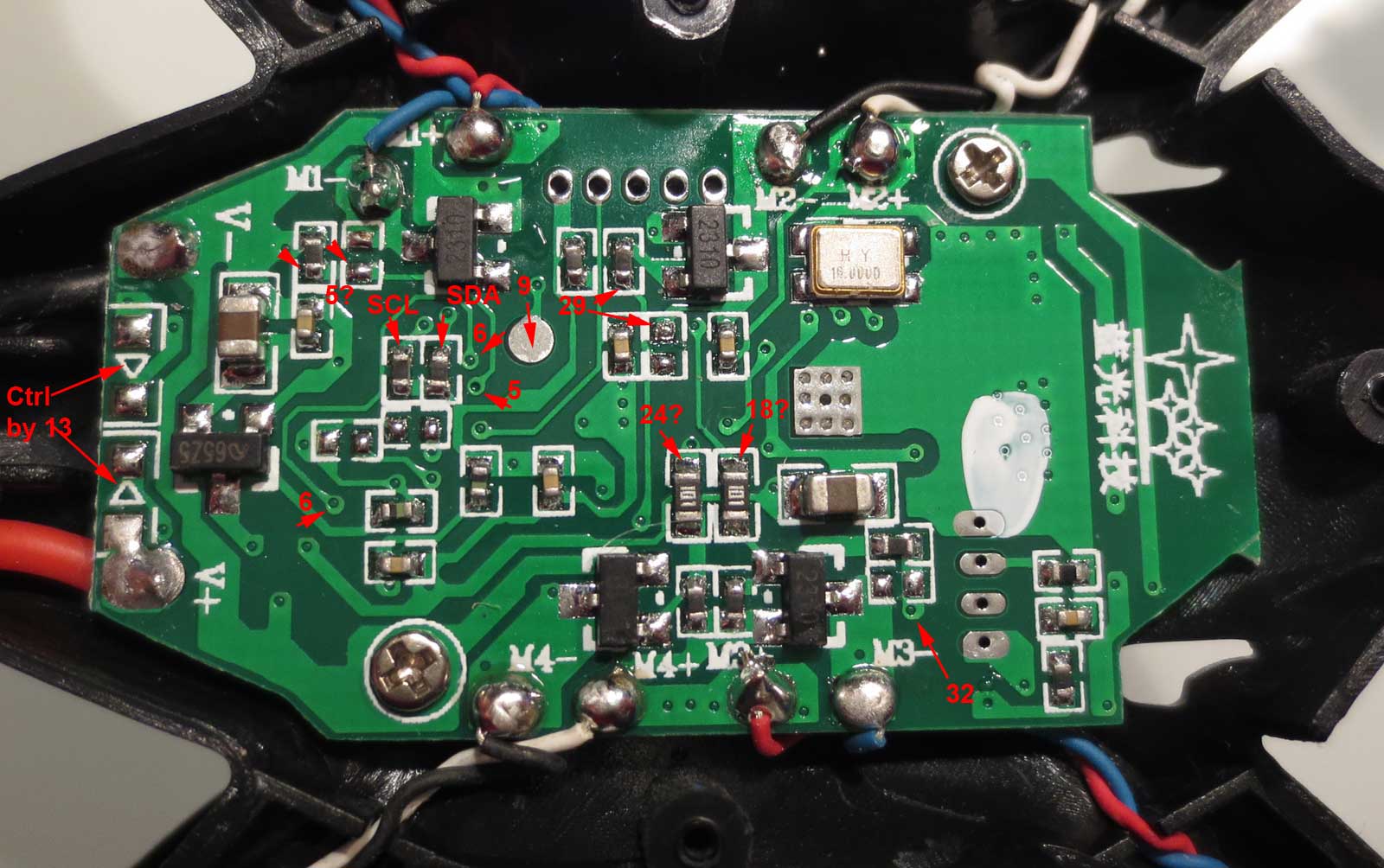
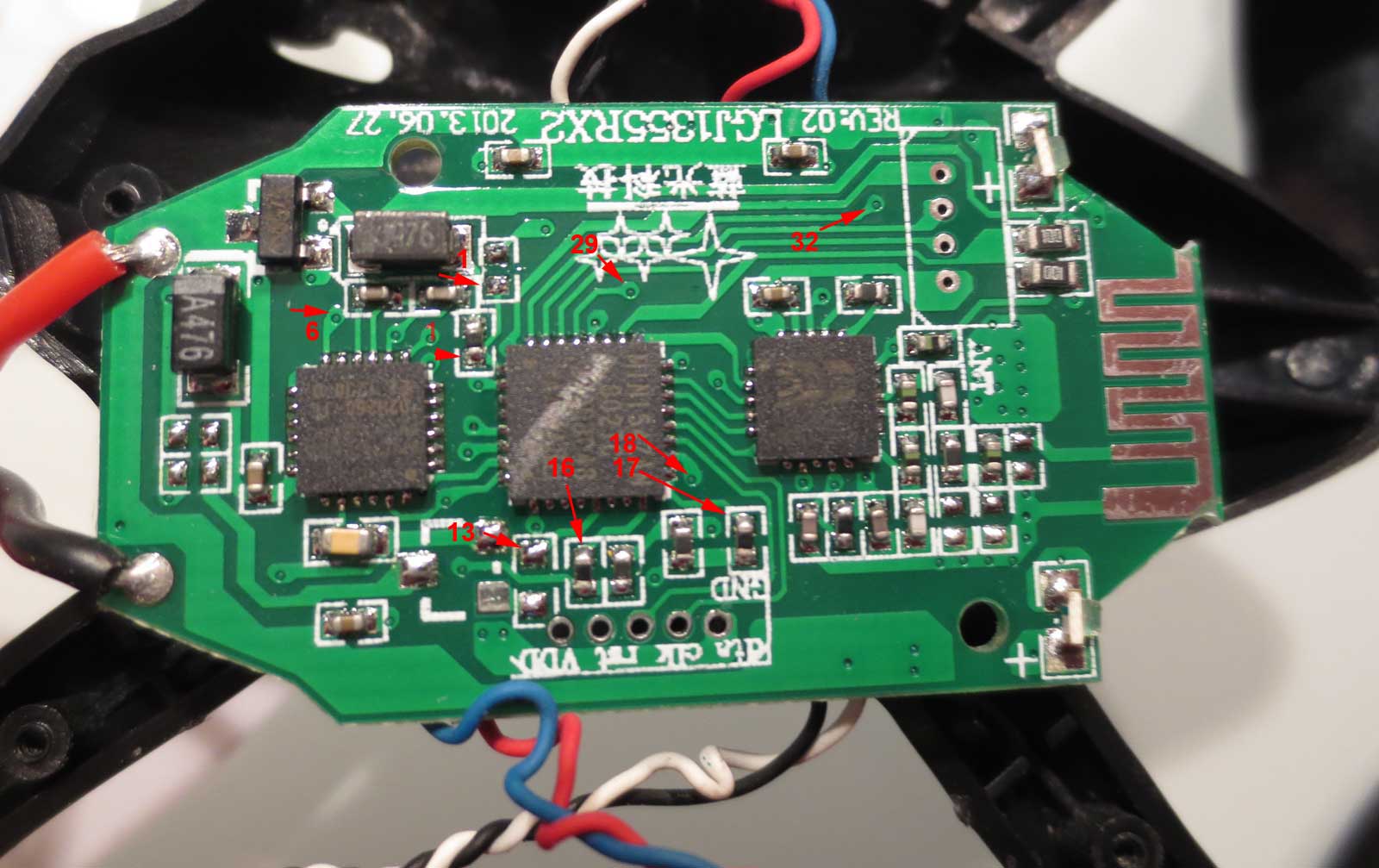
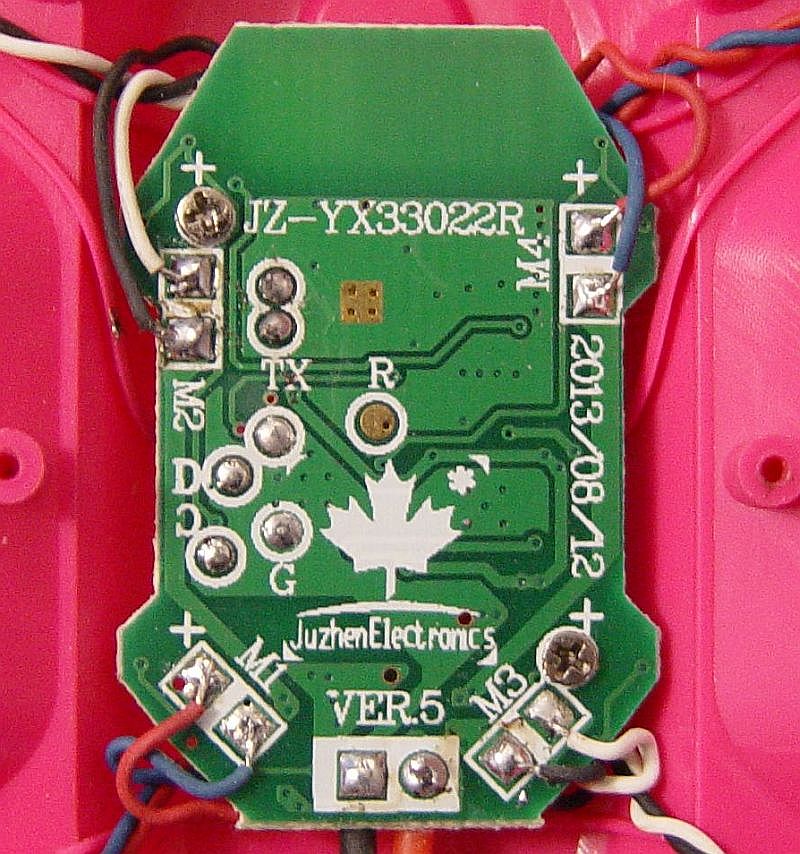
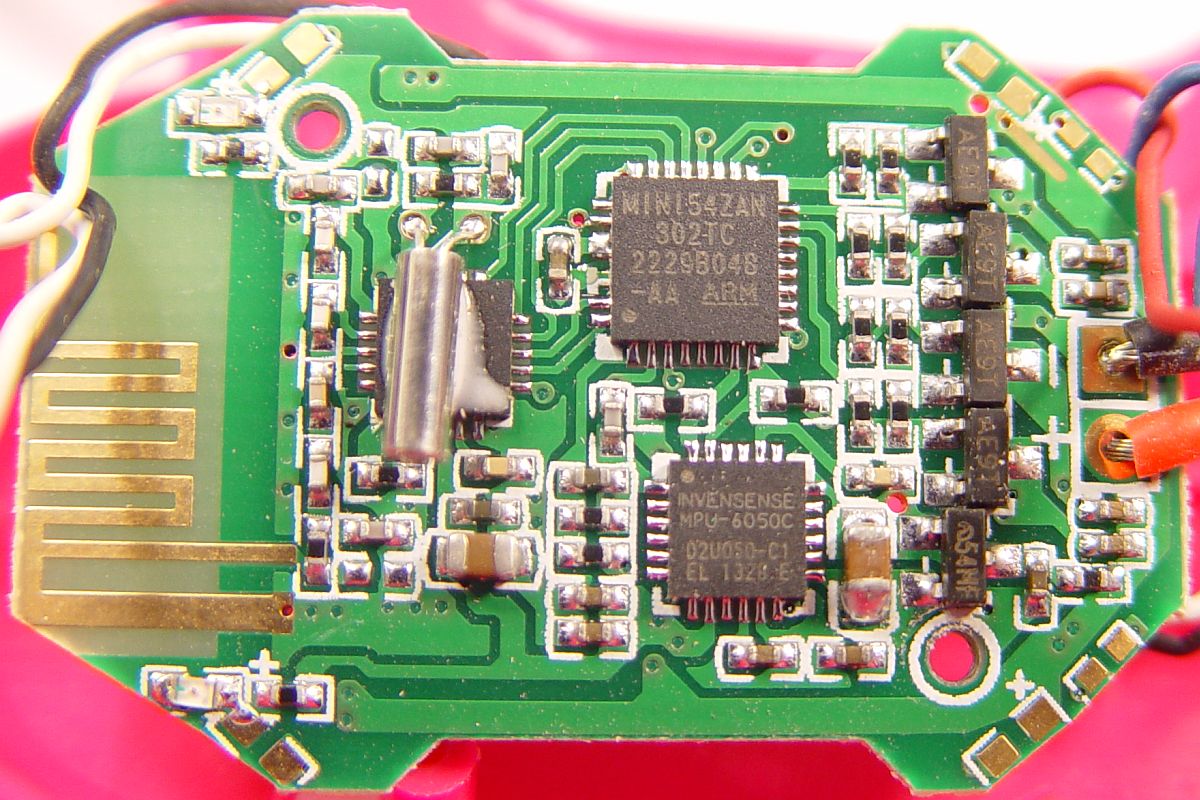
Ich habe heute in mühseliger Kleinarbeit begonnen, die an den Microcontroller angeschlossenen Funktionen zu entschlüssen. Anbei mein aktueller Stand und ein paar Anmerkungen, die ich mir als Gedächnisstütze gemalt habe. Interessant ist, dass die Treiberschaltungen für jeden Motor jeweils an einem PWM-Ausgang und an einem ADC-Eingang hängen. Auf irgendeine Weise gibt es also eine Rückkopplung von den Motoren. Es wäre interessant, die Treiberschaltungen als Schaltbild zu rekonstruieren. Vielleicht kann dabei jemand unterstützen? Andere interessante Fünde: - Den I2C Bus könnte man an den Pull-Up Widerständen abgreifen. (Wenn man an 0402 löten kann) - Pin 9 ist auf ein Pad herausgeführt. Funktion? - Pin 13 ist mit einen nicht bestückten Schaltungsteil verbunden, der möglicherweise noch weitere LEDs auf der linken Seite ansteuern soll. - BK2423 und MPU6050 hängen mit Minimalbeschaltung an der MCU. Eine besser formatierte Tabelle gibt es im Anhang als CSV und TXT.
1 | MINI51ZAN |
2 | QFN33-Pin Manual 3.2.2, p.16 |
3 | CPNx/CPPx = Analog comparator input |
4 | CPO=Analog comparator output |
5 | AINx= ADC input |
6 | CK0=Frequency divider output |
7 | TxEX=Timer capture/reset input |
8 | |
9 | Pin Primary Secondary Function understood External connection |
10 | 1 P1.5 AIN5, CPP0 Partially Connected to motor ctrl circuit 4 (sense?) |
11 | 2 reset YES SWD Port reset |
12 | 3 P3.0 AIN6, CPN1 NC? Not connected? |
13 | 4 P5.4 NC? Not connected? |
14 | 5 P3.1 AIN7, CPP1 Partially Connected to motor ctrl circuit 1 (sense?) |
15 | 6 P3.2 T0EX,STADC,INT0 YES MPU6050, pin 12 (interrupt) |
16 | 7 P3.4 SDA, T0 YES MPU6050, pin 24 (SDA) |
17 | 8 P3.5 SCL, T1 YES MPU6050, pin 23 (SCL) |
18 | 9 P3.6 T1EX,CK0,CPO0 Partially Connected to test pad |
19 | 10 P5.1 XTAL2 NC? Not connected? |
20 | 11 P5.0 XTAL1 NC? Not connected? |
21 | 12 VSS YES VSS |
22 | 13 P5.2 INT1 Partially Connected to unpopulated circuit part. Possibly be to control LEDS on left side |
23 | 14 P2.2 PWM0 NC? Not connected? |
24 | 15 P2.3 PWM1 NC? Not connected? |
25 | 16 P2.4 PWM2 Partially Connected to Motor 1 ctrl |
26 | 17 P2.5 PWM3 Partially Connected to Motor 2 ctrl |
27 | 18 P2.6 PWM4, CPO1 Partially Connected to Motor 3 ctrl |
28 | 19 P4.6 ICE_CLK (SWD) YES SWD Port CLK |
29 | 20 P4.7 ICE_DAT (SWD) YES SWD Port Dat |
30 | 21 P0.7 SPICLK YES BK2423 SPI CLK |
31 | 22 P0.6 MISO YES BK2423 SPI MISO |
32 | 23 P0.5 MOSI YES BK2423 SPI MOSI |
33 | 24 P0.4 PWM5, SPISS Partially Connected to Motor 4 ctrl |
34 | 25 P0.1 RTSn, RX, SPISS YES BK2434 SPI CSN |
35 | 26 P0.0 CTSn, TX YES Controls LEDS via 10 Ohm resistors |
36 | 27 P5.3 AIN0 NC? Not connected? |
37 | 28 VDD YES |
38 | 29 P1.0 AIN1 NO Connected to motor ctrl circuit 2 (sense?) |
39 | 30 P1.2 RX, AIN2 YES UART PORT RX |
40 | 31 P1.3 TX, AIN3 YES UART PORT TX |
41 | 32 P1.4 CPN0, AIN4 Partially Connected to motor ctrl circuit 3 (sense?) |
42 | 33 (Pad) VSS |
:
Bearbeitet durch User
Hallo kennt jemand einen deutschen oder eu shop der sowas ähnliches bietet ? http://www.fpvhobby.com/2-transmitter
Tim schrieb: > Pin 9 ist auf ein Pad herausgeführt. Funktion? Sieht fast so aus, als hätte der Pin bei dem Board nicht wirklich eine Funktion. Laut Datenblatt kann der Pin folgende Verwendung haben:
1 | Input/Output: Digital GPIO pin |
2 | Output: Analog comperator output pin |
3 | Output: Frequency divider output pin |
4 | Input: Timer1 external capture input/reset trigger input pin |
Also als Testpad würde das Ganze ja nur Sinn machen, wenns ein digital output pin oder analog comperator output pin wäre. In dem Fall wäre es interssant ob da digitale oder analoge Daten überhaupt anliegen oder sowieso nicht. Für eine eventuell eigene entwickelte Firmware aber dann wohl eher von weniger Bedeutung. Dann kann er ja nach belieben benutzt werden. Ich schätze mal nicht, dass man das PAD irgendwie für clock divider output oder external capture/reset input verwendet.
:
Bearbeitet durch User
Wie lange hat der Versand bei Euch gedauert? Ich warte schon seit fast einem Monat..
3 wochen ca. hat es gedauert . ich find kein kleines kamera modul
Noobi schrieb: > 3 wochen ca. hat es gedauert . > ich find kein kleines kamera modul diese hier müsste gehen: http://www.ebay.de/itm/200934338158 (ohne Gehäuse und gespeist vom Akku des Copter's)
:
Bearbeitet durch User
PIN9 aktiviert bestimmt die ISP-Programmierung...
@ Marius S.: "von Elektronik habe ich nichts geschrieben." Das bezog sich auf meinen Beitrag von 10.11.2013 22:32. Eine Zeitlang hatte ich an einem Ladecontroller im Accu gedacht, die Versuche gaben das aber nicht her. Ich sehe da eher eine Eigenschaft unter bestimmter Bedingung hochohmig zu werden und nach unterschreiten eines Haltestroms wieder niederohmig. Die Kombination Flieger - mitgelieferter Ladeadapter funktioniert ja so. Wer aber einen Fremdaccu einbaut braucht wohl auch ein richtiges Ladegerät. Einige hier im Forum bauen den Ladeadapter in ein richtiges Ladegerät um - sind vieleicht schon fertig. Ich werde erstmal nichts ändern.
Ich hatte auch vermutet, dass Pin 9/das Pad den ISP-Mode aktiviert. Leider passiert nichts wenn man das Pad mit Masse verbindet. Übrigens wird der Bootloader wohl normalerweise dadurch aktiviert, dass kontinuierlich 0x00 an RX gesendet wird.
:
Bearbeitet durch User
Turbonator schrieb: > Hallo kennt jemand einen deutschen oder .. Währe das was? http://www.ju-tec.de/art/099/099526/MRF24J40MA-I-RM-ZigBee-Modul-2-405-2-48GHz-95dBm-0-dBm-12-Module/ z.Z. nicht lieferbar, vor 14 Tagen hab ich noch zwei gekauft, aber noch nichts mit gemacht. Ist von 'Microchip' http://www.microchip.com/pagehandler/en-us/technology/personalareanetworks/home.html?tab=t1
Aaron Christophel schrieb: > diese hier müsste gehen Oder z.B. Y3000. Wir wiederholen uns. Die Wiki-Seite muss her. Tim schrieb: > Das bringt alles etwas mit den richtigen Sensor-Fusion Algorithmen. Du hast ja Recht. Bei dem Drucksensor hatte ich vergessen, dass GPS so träge ist. Und einen Kompass habe ich bisher nicht vermisst, da die Gier-Regelung suuuper Stabil ist. Aber der würde ja fast nix kosten und fast nix wiegen, also: Warum nicht? Manuel Steiner schrieb: > Für eine eventuell eigene entwickelte Firmware aber dann > wohl eher von weniger Bedeutung. Dann kann er ja nach belieben benutzt > werden. Genau. Z.B. Kamera auslösen oder so. Ist doch cool, wenn der Pin frei ist.
Marius S. schrieb: > Würde mich wundern, wenn da noch > eine Elektronik drin versteckt ist... Bei einem Akku ist mir heute das Kabel abgerissen und im Akku ist wirklich noch eine kleine Platine drin. Da Schutzschaltungen nur für Leute mit Angst vor explodierenden Akkus sind habe ich die natürlich gleich entfernt, habe jetzt auch einen Max1555 im Ladegerät...
Marius S. schrieb: > im Akku ist wirklich noch eine kleine Platine drin. Damit ist das Original "Ladegerät" also wieder "zur Benutzung freigegeben"? Klar: Mit dem Risiko, dass jemand Nachbau-Akkus ohne Schutzschaltung erwischt.
Torsten C. schrieb: > Oder z.B. Y3000. Wir wiederholen uns. Die Wiki-Seite muss her. Ja, der Thread wird langsam unübersichtlich und die Fragen wiederholen sich. Hast Du Lust eine Seite anzulegen? Was nehmen wir? http://www.mikrocontroller.net/articles/Hack-O-Copter http://www.mikrocontroller.net/articles/JXD-385 http://www.mikrocontroller.net/articles/Quadcopter-Hacking ...?
:
Bearbeitet durch User
Tim schrieb: > http://www.mikrocontroller.net/articles/Hack-O-Copter Würde am besten zum Namen in Github passen.
http://www.mik...cles/Hack-O-Copter (Für den harten Kern) http://www.mik...cles/Hack-O-Copter-BayAndFun http://www.mik...cles/Hack-O-Copter-xxxxxxxxx http://www.mik...cles/Hack-O-Copter-YYYYYYY Eine Struktur sieser Art schaffen, wär das was ?????
Wo schrieb: > wär das was? Das Prinzip ist gut, wenn's irgendwann mal zu unübersichtlich wird. Tim schrieb: > Hast Du Lust eine Seite anzulegen? Ja, ich fange mit "Für den harten Kern" an. ;-)
Kann es sein das unser Blinky Projekt falsch ist? Da ist der Header und die Startup vom M051 drin. Aber bei Keil wird gesagt das für den M54ZAn ein anderer Header und zwar Mini51.h und auch ein Startup Mini51 genutzt wird. Ist das Blinky somit falsch?
No y. schrieb: > Kann es sein das unser Blinky Projekt falsch ist? > Da ist der Header und die Startup vom M051 drin. Aber bei Keil wird > gesagt das für den M54ZAn ein anderer Header und zwar Mini51.h und auch > ein Startup Mini51 genutzt wird. Ist das Blinky somit falsch? Es funktioniert aber....
Robert Knipp schrieb: > Es funktioniert aber.... Ich glaube (hoffe), noy wollte fragen, ober er eine neue korrigierte Version hochladen darf, oder ob das so gewollt ist.
Hm, okay... Ich versuche mich halt gerade mit meinem J-Link. Das muss doch irgendwie gehen... Ich habe nur,leider absolut keine Ahnung was ich da noch wo einstellen muss.. Gibt da ja mehrere Flash-Scripte zur Auswahl usw... Jedesmal kommt failed mit der Meldung: Cortex-M0 ! Keine Ahnung was das sein soll. Wenn ich kein Script angebe löscht er ohne Probleme, aber es ist noch alles drauf... Also ich meine er sagt er hätte es gemacht ohne das was passiert... Vielleicht schrieb ich morgen mal ne Email an Segger... Vielleicht sind die ja nett. @ Torsten: Ne ich hab fast keine Ahnung von ARM. Bzw. bisher nur bissel mit Luminary Micro Boards oder den STM aber da ist mit Coocox ja schon alles drin... Wollte nur Nachfragen ob da der M051 korrekt ist oder ob es vielleicht etwas bringt das alles auf Mini51 umzustricken da Keil dies vorschlägt.
:
Bearbeitet durch User
Noy hat recht, das Projekt nutzt die M051 includes. Da die Register an der gleichen Addresse liegen, funktioniert es aber trotzdem. Nuvoton hat gerade eine neue Version der Mini51 Beispiele heraus gebracht: http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=4b47b09d-b116-4ccd-aa85-31e261a87d30 Ich werde bei Gelegenheit mal ein CMSIS Blinky implementieren.
Will noch jemand von Euch zur Github-"Organization" hinzugefügt werden? Wenn ja, bitte sendet mir den Namen auf Github. Ihr könnte die Repositories dann direkt auslesen und updaten.
Hat hier jemand Ahnung von J-Link? Und kann mir mal erklären was ich wo auswählen muss? Beim einrichten in Keil? In Coocox läuft es direkt... Bzw. in Keil bisher auch mit den STM Boards da muss ich halt das entsprechende Script auswählen under dem Flash Fenster... Aber für den Mini54ZAN gibt es kein spezielles Script...
noy, hast du den mini51 support in Keil installiert? (legacy device support?). Du kannst den Adapter in "Options for Target->Debug" rechts oben auswählen.
Ja da kann ich den auch auswählen und auch alles einstellen. Wenn ich dann auf Settings drücke beim J-Link kann bzw. musste ich bisher immer ein "Programming Algorithmen" Script auswählen. Also J-Link auswählen dann settings drücken und auf den Reiter Flash wechseln. An dem Rest muss ich ncihts einstellen oder? Das ist ja alles schon im Projekt festgelegt. Ich kann auch direkt im J-Link CMD das Device (M054ZN oder Mini54LAN ? Oder was ganz anderes sind viele da...) anwählen und dann erase eingeben. Aber da failed der Erase immer. Weil nix in den Ram geladen werden kann. Bzw. could not read target memory. Please check your Flash Settings.. Also beim J-Link gibt es den Befehl Unlock.. Der funktioniert aber nur bei bestimmten Controllern. LM3SXXXX und STM32 und EFM... Denke mal das es dann wirklich Nuvoto eigenes Zeug ist und Segger es deswegen auch nicht kann...
:
Bearbeitet durch User
Hier ist ein Blinky basierend auf CMSIS und der aktuellen Mini51 Lib: https://github.com/hackocopter/Examples/tree/master/Blinky-CMSIS Bisher noch ungetestet. Der Code sollte auch etwas über die serielle Schnittstelle ausgeben.
:
Bearbeitet durch User
Hallo kennt jemand einen deutschen oder eu shop der sowas ähnliches bietet ? http://www.fpvhobby.com/2-transmitter Aaron Christophel schrieb: > Noobi schrieb: >> 3 wochen ca. hat es gedauert . >> ich find kein kleines kamera modul > > diese hier müsste gehen: > http://www.ebay.de/itm/200934338158 > (ohne Gehäuse und gespeist vom Akku des Copter's) sry ich brauch ein kamera modul pal/ntsc oder mit funk was zur spannung vom akku passt ich möchte das bild direkt sehen
Turbonator schrieb: > oder mit funk 3 Worte, 2 Fragen: 1. Welcher Funk? Über den eingebauten nrf24l01+? Oder meinst Du, Du findest Sender, die leicht genug sind? 2. Was meinst Du mit "oder"? Soll alternativ ein Kabel am Hack-O-Copter hängen?
Ich habe auch einen Quadrocopter am 16.10. über eBay bestellt, nämlich extra den mit dem angegebenen Artikelstandort "Frankfurt" - damits auch schnell geht. Ich bekam dann einen Tag nach dem Kauf die Mail, dass der Versand ca. 12 Werktage (das sind knapp 3 Wochen!) dauern würde. Aus Frankfurt??? Mittlerweile ist die Zeit längst abgelaufen und der Copter ist immer noch nicht da. Ich habe dem Verkäufer daher eine Mail mit folgendem Wortlaut geschickt: "Hallo, mittlerweile sind die 12 Werktage längst um und bei mir ist nichts eingetroffen. Ich kann auch überhaupt nicht verstehen, warum Sie in der Artikelbeschreibung als Artikelstandort "Frankfurt" angeben, wenn doch offensichtlich ist, dass bei so einer langen Lieferzeit (12 Werktage sind ja real 3 Wochen!) die Quadrocopter gar nicht aus Frankfurt, sondern wohl direkt aus China kommen. Aus Frankfurt könnte meine Oma den Copter zu Fuß innerhalb der von Ihnen angegebenen Zeit bringen.... da stimmt also was nicht. Ich bitte Sie, mir verbindlich einen Liefertermin zu nennen. Mit freundlichen Grüßen, ..."
Frank M. schrieb: > Ich habe auch einen Quadrocopter am 16.10. über eBay bestellt, nämlich > extra den mit dem angegebenen Artikelstandort "Frankfurt" - damits auch > schnell geht. Hi Frank, das tut mir leid, das der immer noch nicht da ist. Ich hab auch aus "Frankfurt" bestellt und es hat knapp 2 Wochen gedauert. Du hast halt auf jeden Fall den Vorteil das du dich nicht mit dem Zoll rumärgern brauchst ;-)! Der wird dir wahrscheinlich anbieten das Geld zurückzugeben oder einen neuen Rausschicken. Vielleicht hast dann zwei. Grüße
Hi Kille, Kille H. schrieb: > Der wird dir wahrscheinlich anbieten das Geld zurückzugeben oder einen > neuen Rausschicken. Vielleicht hast dann zwei. Ja, so etwas stand schon in der ersten Kontaktmail vorsorglich drin: "Falls die Ware nach der max. Lieferzeit(12 Werktage) nicht bei Ihnen eintrifft, melden Sie sich bei uns. Bewerten Sie uns NICHT SOFORT negativ oder neutral.Es gibt verschiedene Gruende dafuer, meiste koennen wir leider nicht beeinflussen. Aber die Kundenzufriedenheit liegt bei uns in erster Linie. deswegen werden wir Ihnen den Gesamtbetrag zurueckerstatten. Sie koennen trotzdem den angekommenden Artikel als unsere Entschaedigung behalten." Ich habe dann mal in die Bewertungen geschaut: Es kommt ziemlich oft vor, dass die Leute anmerken, dass nichts angekommen ist. Aber in jedem Fall gab es wohl immer das Geld zurück.... immerhin etwas :-) Ich sehe es trotzdem als Unverschämtheit an, dass die als Artikelstandort grundsätzlich (egal, welcher Artikel) "Frankfurt" reinschreiben, das Zeug aber offenbar gar nicht in Frankfurt lagert. Naja.... warten wirs ab :-) Gruß, Frank
So einen Mist hatten wir wahrscheinich fast alle schon mal hinter uns. Es bringt aber m.E. nix, hier E-Mail-Kopien zu posten. Da geht die eigentliche Information: "Aus Franfurt geht's auch nicht schneller" schnell im "Grundrauschen" unter. Kille H. schrieb: > Du hast halt auf jeden Fall den Vorteil das du dich nicht mit dem Zoll > rumärgern brauchst Da kann man sich nicht grundsätzlich sicher sein. Sogar Zoll habe ich mal bezahlt, der Paypal Käuferschutz hat mir das Geld aber zurück überwiesen: http://notizblog.wordpress.com/2012/12/10/anstrengender-ebay-kauf/ Aber der Hack-O-Copter ist ja frei von Einfuhrumsatzsteuer, also kein Problem.
:
Bearbeitet durch User
Die schicken durchaus aus Frankfurt. Da sitzt ein Importeur, der einen Container aus China bekommt, wo mehr als nur dein einer Copter drin sein wird. Sonst lohnt sich der Versand auch garnicht. Und bis der Container nicht eingetroffen ist, kann der nette Herr oder die Dame in Frankfurt auch nix abschicken. Entsprechend muss man eben etwas warten...
Torsten C. schrieb: > "Aus Franfurt geht's auch nicht schneller" Also ich finde schon. Wahren aus China dauern bei mir meistens ca. 3-4 Wochen. Hatte aber auch schon Sachen nach EINER Woche da. Aber vielleicht hatte ich mit dem aus "Frankfurt" einfach nur Glück die Waren kommen aus China und bei mir ging es nur sehr schnell. Die Stichprobe reicht einfach noch nicht für eine aussagekräftige Statistik...
Torsten C. schrieb: > Turbonator schrieb: >> oder mit funk > > 3 Worte, 2 Fragen: > > 1. Welcher Funk? Über den eingebauten nrf24l01+? Oder meinst Du, Du > findest Sender, die leicht genug sind? > > 2. Was meinst Du mit "oder"? Soll alternativ ein Kabel am Hack-O-Copter > hängen? Nicht der eingebaute funk. http://www.fpvhobby.com/2-transmitter Einen sender hab ich gefunden oberer link jetzt brauch ich dafür eine Kamera wie diese http://www.electronics123.com/s.nl/it.A/id.2905/.f?sc=8&category=241 nur günstiger . Das ODER : oder was anderes fertig mit funk leicht und passend zur spanung des quadrokopters
Ich finde ja die Bezeichnung am Bild ganz putzig... http://www.fpvhobby.com/transmitter/21-2-55-volt-500mw-24ghz-video-transmitter.html http://www.globe-flight.de/58-GHz-FPV-SETs Aber nimm 5.8GHz nicht auch 2.4GHz wie bei der Steuerung...
Hast du schonmal gerrechnet was dein Transmitter bei optimalem Wirkungsgrad an Stom zieht bei 3,7V? ;) Wirst wohl nciht lange fliegen können... Ok wenn es ein 10mW wird gehts..
:
Bearbeitet durch User
Irgendwann kommt mein Copter bestimmt auch. Falls noch jemand das Schaltbild aufnehmen möchte, hier ist schon einmal der Mini51 als Eagle-Library. Gyro und TRx kommen als nächstes.
No y. schrieb: > es ein 10mW wird gehts. War da auch ein Sender mit 10dBm dabei? Ich habe nur gefunden: * 0,6 Gramm 2.4GHz 16dBm 60mA * 2,2 Gramm 5.8GHz 23dBm 200mA * 2,0 Gramm 680MHz 16dBm ???mA 2 Gramm gehen ja noch. Aber die leichteste Kamera hat 22 Gramm und braucht 5V. Richtig? Oder habe ich was übersehen? Testi schrieb: > nicht auch 2.4GHz wie bei der Steuerung
1 | Ch1: 2414 mHz |
2 | Ch2: 2432 mHz |
3 | Ch3: 2450 mHz |
4 | Ch4: 2468 mHz |
Die Kanäle 76..125 des NRF24L01 wären doch noch frei, das müßte doch reichen. @Georg: Cool, danke. :-)
Ich kenn es nur von den großen FPV. Wenn man 2,4GHz fliegt nimmt man ein 5.8GHz System! Wenn man mit 40MHz fliegt geht auch ein 2,4GHz System...
Ist mir zuviel das jetzt alles zu lesen hier. :-) Heute ist das Ding von Ebay angekommen das ich vorletzte Woche gekauft und bezahlt hatte. Ebay-Artikel Nr. 200978469863 Von wegen auch "Artikel Standort Franktfurt", die Teile werden aus Hong Kong geliefert - was auch die lange Lieferzeit erklärt die ja ausdrücklich angegeben ist. Ein Zoll Aufkleber war auch drauf. Da kann ich nur sagen, Finger weg von dem Ding. - Anleitung nur Chinesisch - zwischen den Pluspolen des Batterie-Fachs der Fernbedienung und den Zellen ist ein Luftspalt den ich erstmal mit etwas Alu-Folie überbrücken musste - fliegt katastrophal beschissen, haut sofort irgendwohin ab, stabil ist der nur auf dem Boden oder wenn er sich an der Decke festsaugt - Akku sehr schnell leer - die Schutzringe sind ein Witz Also da habe ich mit meinem Fun2Get "Falcon-X Metal RTF" Gyro-Heli der bei Amazon auch nur 20€ kostet deutlich mehr Spass, den kann man wenigstens in die Luft bekommen und dort halbwegs stabil halten.
Rudolph schrieb: > Ebay-Artikel Nr. 200978469863 Das ist auch nicht der richtige Quadcopter. Aber vielleicht kannst Du trotzdem mal ein Bild von der Platine machen?
Rudolph schrieb: > m Irgendwas muss kaputt sein ich trimm meinen nur kurz und der bleibt an einer stelle außer wenn er vorher in eine richtung beschleunigt hat das aber auch nur minimal kurz gegensteuern fertig
Georg G. schrieb: > Irgendwann kommt mein Copter bestimmt auch. Falls noch jemand das > Schaltbild aufnehmen möchte, hier ist schon einmal der Mini51 als > Eagle-Library. Gyro und TRx kommen als nächstes. Sehr schön! Du könntest noch die Pinnumern ergänzen?
> 2 Gramm gehen ja noch. Aber die leichteste Kamera hat 22 Gramm und > braucht 5V. Richtig? Oder habe ich was übersehen? 10 mw , 5,8ghz , 70ma ,1,2g sind dabei aber besser wäre 20mw , 2,4ghz , 42ma , 0,3g Keiner eine idee mit der kamera ?
Rudolph schrieb: > Ist mir zuviel das jetzt alles zu lesen hier. Ich habe mit dem Wiki-Artikel schon angefangen. Tim schrieb: > Das ist auch nicht der richtige Quadcopter. Kommt auch ins Wiki, als Warnung. @Rudolph: Kannst Du dafür ein Foto machen? Die Fotos aus dem ebay-Artikel sind zu heikel wegen des Urheberrechts. Erster Schuss einer Gliederung: ---------- Der Begriff Hack-O-Copter beschreibt einen Nachbau des Quadrocopters „Hubsan X4“, der er sich einfach „hacken“ lässt; die Original-Firmware kann also überschrieben und durch eigene ersetzt werden. Er wird für ca. 21€ verkauft, siehe Beitrag „Hackbarer(?) 21 EUR Quadcopter“. Die Original-Firmware kann nicht ausgelesen werden, es muss also eine komplett neue Firmware erstellt werden. 1 Beschreibung des Quadrocopters - Abmessungen - Gewicht - Lieferumfang - Reichweite - Flugdauer und Ladezeit - Funktionen (3 Empfindlichkeiten, umdrehen, Rekalibrierung?) - Link zur Bedienungsanleitung 1.1 Bedienung … 1.2 Komponenten Der Quadrocopter wird von vier kernlosen Gleichstrommotoren („Coreless DC“) angetrieben. Im Inneren des Gehäuses ist eine Platine. Ihre vergleichsweise modernen Hardware-Komponenten (Mikrocontroller, Sensoren, 120mΩ MOSFETs und ein Funkmodul) sind in den folgenden Kapiteln beschrieben. 1.2.1 Mikrocontroller … 1.2.2 Sensoren zur Flugstabilisierung … 1.2.3 ESC … Die verwendeten N-Kanal MOSFETs „G2310“ haben einen „Drain-Source On-Resistance“ von etwa 120mΩ. - http://www.mikrocontroller.net/attachment/193854/G2310.pdf 1.2.4 Funk- Transceiver Für die 2,4GHz Funkstrecke zur Fernsteuerung ist mit einem „Beken BK3423“ integriert. Die Vermutung, dass dieser voll kompatibel zum NRF24L01 ist, liegt nahe, ist aber noch nicht bestätigt. 1.3 Zubehör 1.3.1 Lade-Adapter … 1.3.2 Funkfernbedienung … 1.3.3 Propeller … 1.4 chnittstellen 1.4.1 SWD-Port … 1.5 Serielle Schnittstelle … 1.6 I²C-Schnittstelle … 2 Tipps und Tricks 2.1 Bezugsquellen und Kauf 2.1.1 Direktkauf aus China … 2.1.2 Lieferanten aus Europa … 2.2 Ersatzakkus … 2.3 Reduzierung der Unfallfolgen … 3 Ideen für neue Funktionen 3.1 Bessere Flugstabilisierung mit bestehender Sensorik … 3.2 Neue Funktionen mit GPS-Sensor … 3.3 Neue Funktionen mit Luftdruck-Sensor … 3.4 Neue Funktionen mit Kamera … 3.5 Neue Funktionen mit Ultraschallsensor … 3.6 Neue Funktionen mit Infrarot-Entfernungssensor … 3.7 Neue Funktionen mit Bluetooth … 3.8 Erweiterung der Original-Fernbedienung … 3.8.1 Funkmodul mit PA + LNA … 3.8.2 Erweiterung um ein Display … 3.9 Neue Funktionen mit alternativer Fernbedienung … 4 Programmierung neuer Firmware 4.1 Beschreibung der Toolkette … 4.1.1 Notwendige Hardware und Software … 4.1.2 Installation der Toolkette … 4.1.3 ISP und ICD … 4.2 Beschreibung der Firmware-Varianten 4.2.1 „Blinky“ … 5 Weiterführende Links und Quellen … ------------------
Angehängte Dateien:
-

DSCN0097.JPG
68 KB

Hier, nicht lachen, meine kleine Tochter hat sich die Farbe ausgesucht. :-) Dann werde ich das Teil mal zerlegen.
Oder auch nicht, das Ding wird auf der Unterseit von 15 Schrauben zusammen gehalten. Und die je zwei in den Auslegern sind tief versenkt. Ich finde hier gerade keinen passenden Schraubendreher, den zerlege ich morgen auf der Arbeit mal richtig.
Angehängte Dateien:
-

Dsc_6181_LumiaModul.jpg
120 KB
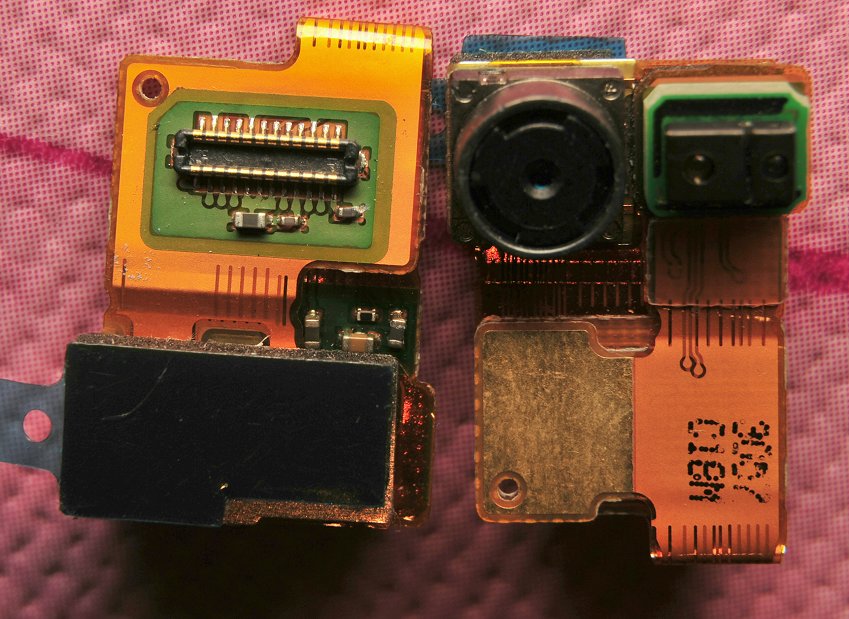
Turbonator schrieb: > Keiner eine idee mit der kamera ? Wiegt weniger als ein Gramm (siehe Bild). Ich arbeite dran. Das ist im Prinzip eine Raspicam (oder heißt die Raspcam?). Ich weiss nicht, wieviel die mit Adapter-PCB wiegt. Außerdem müsste noch etwas dazu, was Video-Siglale für den Sender daraus erzeugt. Oder reichen die 2MBPS vom NRF24L01+? Ach nee, den wolltest Du ja nicht.
Wollen ja können nein , ich bin ein bastler . Wie sieht das denn aus ? Das modul braucht bestimmt einen ic den man programieren muss , wenn du das hinbekommst ist die Auflösungen bestimmt sehr gut mit der lumia cam< ist das doch wenn ich mich nicht täusche , hast du mal geschrieben. Wenn das geht kann der ic osd einblenden wäre auch nicht schlecht
Hier sind zwei interessante Thread zum Nachrüsten einer Kamera für den/die(?) Crazyflie: http://forum.bitcraze.se/viewtopic.php?f=6&t=427 http://forum.bitcraze.se/viewtopic.php?f=6&t=491
:
Bearbeitet durch User
ich hab eine andere frage haben die motoren vom herstellungsprosses her eine feste laufrichtung ?
Noobi schrieb: > haben die motoren vom herstellungsprosses her > eine feste laufrichtung Nein. Das ist nur Verarsche, dass Du die getrennt bestellen kannst. ;-) Spass beiseite: Weiss jemand, woran das liegt? Ich nehme an, dass der Winkel zwischen Kommutator und Spule unterschiedlich ist und die deshalb nicht für ein "umpolen" geeignet sind. Rudolph schrieb: > Hier, nicht lachen, meine kleine Tochter hat sich die Farbe ausgesucht. > :-) Genau wie meine Tochter, die hätte auch Rosa verlangt. Danke.
:
Bearbeitet durch User
Ich hab mal zwei Videos des noch nicht Hack-O-Kopter gemacht. Bei einem sieht man auch meine "kreative" Akku Montage. So macht der auch Spaß, bissl schwieriger zu fliegen. http://m.youtube.com/watch?v=8-4TUFZ634k http://m.youtube.com/watch?v=zYgnTCoxasY Im Vergleich zu mein anderen liegt der viel stabiler. Bei so einer schnellen Drehung wurde der nie stabil bleiben. PS. Gar nicht so einfach das alles mit dem Telefon zu machen.
Torsten C. schrieb: > Erster Schuss einer Gliederung: Gefällt mir. Der Artikel kann ja sowieso mit der Zeit wachsen, aber das gibt erst einmal eine gute Vorlage zum "ausfüllen".
Ich könnte mir bei den Motoren hcöhstens vorstellen, das die schleifer entsprechend angeordnet sind und damit die drehrichtung vorgegeben ist. anderstrum geht auch, aber mit mehr verschleiß
Turbonator schrieb: > Das modul braucht bestimmt einen ic den man programieren muss Ja, den "Mini54ZAN" muss man neu programmieren, wenn die Original-Firmware gelöscht wurde. Sonst fliegt der nie wieder. Chris L. schrieb: > das die schleifer entsprechend angeordnet sind Ja, "Schleifer" == "Kommutator" ^^
Torsten C. schrieb: > Ja, den "Mini54ZAN" muss man neu programmieren Aber um eine RaspCam anzuschließen, braucht man einige Pins. Entweder man setzt einen Programmierbaren Logik-IC ein (der 5M40Z kostet bei Mouser z.B. nur 86ct, reicht aber vermutlich nicht), oder es sind noch genug Pins frei. Tim schrieb: > Der Controller scheint auch noch einige freie Pins zu haben. Wieviele sind's denn, außer "PIN 9"? Noobi schrieb: > hilft das weiter? Nicht wirklich.
Torsten C. schrieb: >> Der Controller scheint auch noch einige freie Pins zu haben. > > Wieviele sind's denn, außer "PIN 9"? Alles was in der Liste als "NC" aufgeführt ist.
Sry hatte die gleiche idee wie noobi mit dem bild und erst zu spät gesehen
Noobi schrieb: > ich hab es mal kopiert hilft das weiter Turbonator schrieb: > Ich meine einen extra ic Das Bild ist doch schon im Thread, warum nochmal hoch laden? Außerdem viel zu groß... Beitrag "Re: Hackbarer(?) 21 EUR Quadcopter" Wie bekommt man die Motoren unbeschädigt auf und wieder zu?
Hallo Leute, ich lese hier schon seid einiger Zeit mit und bin sehr angetan von dem guten Stück und euren Ideen. Aktuell kann ich mich aus Zeitmangel noch nicht mit meinem Exemplar befassen, wollte aber kurz eine Idee / Projekt mit euch teilen. Konkret geht es um den Crazyflie [1]. Ist vermutlich einigen hier schon ein Begriff. Da der Copter auch auf einer ARM-CPU aufbaut, scheint mir die Adaption der Crazyflie Firmware ein sehr vielversprechender Ausgangspunkt für die Entwicklung einer eigenen Firmware. Es ist natürlich die Frage, was genau das Ziel ist. Für die unter uns, die Lust haben so richtig alle Basics der Quadcopter Steuerung / Implementierung zu durchdringen und alles selber zu machen, für die ist diese Firmware sicher nicht das richtige. Ich persönlich möchte jedoch nicht umbedingt das Rad neu erfinden und dabei jedes einzelne Problem aufs neue lösen. Ich persönlich habe viel mehr Lust, einzelne Aspekte zu erweitern, neue Funktionen umzusetzen und verschiedenes auszuprobieren (gibt ja oben schon eine Liste spannender Ideen). Auch wenn mich einzelne Aspekte der Steuerung (Sensor Fusion, Regler) sehr reizen und ich diese neu implementieren werde, scheint mir das Framework der Jungs aus dem Norden eine super Grundlage für meine weiteren Schritte. Vor allem die Debug Möglichkeiten (über den 2,4 Ghz Downlink) sind sicher eine sehr große Hilfe. Daher wollte ich sie hier einmal kurz erwähnen. Es gibt allerdings auch hierbei ein paar Herausforderungen. Vor allem wurde die Firmware für einen Cortex-M3 mit DEUTLICH mehr Mhz, Ram, etc. geschrieben. Daher ist eine 1 zu 1 Übernahme sicher ausgeschlossen. Aber der Rahmen wird sich vermutlich übernehmen lassen... Viele Grüße [1] http://wiki.bitcraze.se/projects:crazyflie:index
Kille H. schrieb: > Ich hab mal zwei Videos des noch nicht Hack-O-Kopter gemacht. > ... > PS. Gar nicht so einfach das alles mit dem Telefon zu machen. http://www.youtube.com/watch?v=Bt9zSfinwFA ;) Grüße, Chris
Angehängte Dateien:
-

DSC00101.JPG
87 KB -

DSC00102.JPG
150 KB -

DSC00108.JPG
210 KB

{kind=link}
Hier mal ein paar Bilder vom Innenleben meines rosa Quadro-Taumlers. Das ist ja noch weniger komplex, Clon des Clons?
Tim schrieb: > Sehr schön! Du könntest noch die Pinnumern ergänzen? Die sind drin, nur default nicht sichtbar. Wird in der nächsten Version der Lib geändert. Als Nachtrag: Ich arbeite mit einem alten Adler (4er Version), zum einen, weil ich dafür eine Lizenz habe und ein Update auf eine neue Version für mich nicht lohnt (die Freeware kann nur eine Seite Schaltplan) und zum anderen, weil man problemlos alte Schaltbilder in neue konvertieren kann und es rückwärts nur mit erheblichem Aufwand möglich ist.
Gute Fotos. :-) Rudolph schrieb: > Clon des Clons? Auf den ersten Blick scheint ja alles dabei zu sein, damit er mit neuer Hack-O-Copter-Firmware nicht mehr taumeln muss. Aber mit EUR 23,19 ist der ja teurer als der JXD-385. Schade. Rudolph, hast Du auch vor, Dir einen Bu-Link zu kaufen? Oder war der mehr zum out-of-the-box-fliegen für Deine Tochter gedacht?
Der war eigentlich mehr zum Fliegen gedacht, ich hatte die Hoffnung, dass der sich leichter fliegen lässt als mein Falcon-X. ARM ist so mangels Bedarf an Rechenpower bzw. noch lange nicht ausgenutzter Rechenpower der AVRs bisher nur interessant für mich aber noch lange nicht ernsthaft im Fokus. Kosten/Nutzen halt, wenn die Kosten für den Controller quasi egal sind weil man nur Prototyping/Kleinstserie macht, hält einen der Umstiegs-Aufwand bei der gewohnten µC-Familie und Toolkette.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.