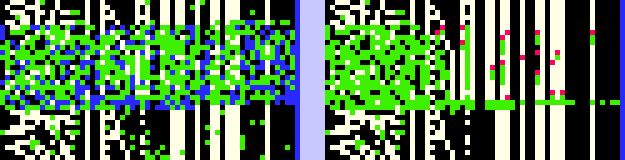
Hi. DCF-Empfänger-Software gibt es viele, ich hab hier aber noch nix gefunden, was eine Fehlerkorrektur bei mieser Empfangslage macht. Momentan bin ich in der heissen Phase der Implementierung und kann noch gut Ideen einbauen. Wenn jemand Interesse an so einer Software (AVR) hat würde den Code hier reinstellen, nachdem alles spruchreif und besser getestet ist. Das Bild zeigt die Software in Aktion: Links das empfangene Signal und rechts daneben das Fehlerkorrigierte Signal. Schwarz: Bit 0 Hellgelb: Bit 1 Grün: Bit unbekannt Blau: Minuten-Marke Rot: Ein Kuckucks-Ei (0 statt 1 oder 1 statt 0) wurde erkannt und korrigiert Paritätsprüfung mache ich noch keine und auch kein Plausibilitätstest, der mehrere Bits übergreift. Mein Problem momentan ist, daß ich keine miesen DCF-Daten habe. Entweder die Daten sind gut oder so mies, daß kaum was damit anzufangen ist. Im Bild habe ich die Antenne senkrecht gestellt für ne Zeit. Wenn jemand das alles testen will: Code kommt im nächsten Post. Johann
Angehängte Dateien:
-

out.png
1,8 KB
Johann wrote: > Entweder > die Daten sind gut oder so mies, daß kaum was damit anzufangen ist. Das ist auch mein Eindruck. Daher habe ich keinen Aufwand in die Fehlerkorrektur gesteckt, der Gewinn erscheint mir zu gering. Um wirklich einen nennenswerten Effekt zu erzielen, müßte man wohl schon das Analogsignal auswerten. In der Regel treten Empfangsstörungen nur zeitweise auf. Daher reicht es, wenn man mit einem fehlerfreien Datensatz die interne Uhr synchronisiert. Peter
Angehängte Dateien:
-

dcf-2100h.png
11 KB
> Daher reicht es, wenn man mit einem fehlerfreien > Datensatz die interne Uhr synchronisiert. Wie bekomm ich einen fehlerfreien Datensatz? Ich werde mal nen höflichen Brief an die PTB schreiben, damit die fehlerfreien Datensätze nicht an der österreichischen Grenze halt machen ;-) Johann
Johann wrote:
> Wie bekomm ich einen fehlerfreien Datensatz?
Du prüfst einfach, ob alle Bits einer Minute störfrei sind, d.h. 100ms
oder 200ms lang und 1000ms oder 2000ms Periode.
Da der Empfänger etwas verschleift, nimmst Du noch ein Toleranzfenster,
z.B. +/-20ms.
Und sobald ein Impuls ausreißt oder != 59 Impulse, wird das ganze Paket
verworfen.
Zusätzlich kann man noch die Parität prüfen.
Damit erziele ich einwandfreie Ergebnisse.
Peter
Ich neige dazu, zusätzlich zu ebendiesem und der Parity nach der Dekodierung 2 aufeinander folgende Minuten miteinander zu vergleichen, also Tag1=Tag2,Stunde1=Stunde2 usw. Dann fliegt zwar der Einfachheit halber jedesmal die volle Stunde raus, aber damit kann ich besser leben als mit einer falschen Zeit.
Andreas Kaiser wrote: > Ich neige dazu, zusätzlich zu ebendiesem und der Parity nach der > Dekodierung 2 aufeinander folgende Minuten miteinander zu vergleichen, Genauso mache ich das auch. Ich verwende dazu die Software von Peter Dannegger mit all den Bitlängen Prüfungen und hatte im letzen Jahr nur 1x den Fall, dass ich etwas falsches emfpangen habe (OK, ich muss dazu sagen, ich sitze natürlich nicht den ganzen Tag vor der Uhr und betrachte die OK/Fehler LED, und dass ich nur etwa 60km vom Sender wegwohne). An diesem einen Tag zeigte interessanterweise keine einzigste Funkuhr im Haus das Antennensymbol an. Es gibt übrigends nicht schlimmeres als eine Funkuhr die falsch anzeigt. Dummerweise steht bei mir so ein Billigmodell rum. Die zeigt dann statt z.B. 12 Uhr auch mal 10 Uhr an. Anscheinend prüft diese nur Parity, und wenn 2bits falsch sind wird dann eben falsch angezeigt.
Peter schrieb: > Johann wrote: >> Wie bekomm ich einen fehlerfreien Datensatz? > Du prüfst einfach, ob alle Bits einer Minute störfrei sind, d.h. 100ms > oder 200ms lang und 1000ms oder 2000ms Periode. Sind sie nicht. So komm ich doch nicht an einen fehlerfreien Datensatz. So kann ich nur testen, ob ein Datensatz fehlerfrei ist. > Da der Empfänger etwas verschleift, nimmst Du noch ein Toleranzfenster, > z.B. +/-20ms. Selbstredend. > Und sobald ein Impuls ausreißt oder != 59 Impulse, > wird das ganze Paket verworfen. Also immer. So ein Ansatz ist zum scheitern verurteilt. Wenn Du praktisch keine Störungen aufm Signal hast ist das Thema für Dich natürlich komplett ininteressant. > Zusätzlich kann man noch die Parität prüfen. Soweit komm ich garnicht. Es geht an diesem Punkt noch nicht darum, etwas zu prüfen. Es geht darum, an was ranzukommen, um es prüfen zu können. > Damit erziele ich einwandfreie Ergebnisse. > Peter Soweit die Praxis in Deutschland und die Theorie in Österreich. Wenn ich n gutes Signal hätte, würd ich mir die Gedanken nicht machen, glaub mir. Zusätzlich bügel ich kuze Spikes aus, d.h. wenn sowas wie 00100 oder 11011 im 10ms-Raster auftaucht, wird das ausgebügelt. Hilft auch nix. Ich hab ich mal angefangen, ein Konzept zu machen. Als Diskussionsgrundlage sind da auch Daten und eine Wahrscheinlichkeitsbetrachtung zur Empfangsdauer. http://www.gjlay.de/pub/dcf77/konzept.html Johann
Johann wrote: > Soweit die Praxis in Deutschland und die Theorie in Österreich. Wenn ich > n gutes Signal hätte, würd ich mir die Gedanken nicht machen, glaub mir. Zuerst hattest Du aber gesagt, daß Dein Signal gut ist: Johann wrote: > Mein Problem momentan ist, daß ich keine miesen DCF-Daten habe. Peter
Peter schrieb: > Johann wrote: >> Soweit die Praxis in Deutschland und die Theorie in Österreich. Wenn ich >> n gutes Signal hätte, würd ich mir die Gedanken nicht machen, glaub mir. > Zuerst hattest Du aber gesagt, daß Dein Signal gut ist: > Johann wrote: >> Mein Problem momentan ist, daß ich keine miesen DCF-Daten habe. > Peter Sorry für das Missverständnis. Will meinen: Ich hab kaum mieses Originaldaten für den Test. Hintergrund: Ich hab schon mehrere DCF-Uhren gebaut, funktionieren alle prima. Stehen 200km bzw. ca. 350km von Mainflingen (Saar + Nagold). Eine steht jedoch bei Wien und schafft den Abgleich nicht, auch nicht mit Ausbügeln von Spikes etc. Das Problem ist dort wohl bekannt, ein Kumpel 2-3km weiter hat ähnlichen Huddel mit einer gekauften Funkuhr. Ich will also ein Update des Programms machen für den ATmega8. Den alten DCF-Algorithmus hab ich komplett in die Tonne gekloppt, weil er einfach (trotz Toleranzen) viel zu strikt war. Das dcf-2100h.png von enthält Originaldaten, bzw einen brauchbar aussehenden Ausschnitt daraus -- Rest ist kompletter Müll. Aber eben zu kurz, um mein neues Verfahren zu testen. Die Uhr steht 1000km weit weg, daher hab ich schlechte Daten selber geschnitzt durch Verdrehen der Antenne. Alternativ wäre das Thema Antennenbau. Aber Analog-Technik ist mir zu schwer, und ohne Oszi wird das wohl eh nix... Johann
Hab mich ein bisschen angelesen zum Antennenbau. Soweit ich weiß, ist in dem Modul ein Temic U4224B drinne, im Datenblatt steht was zum Antennenabgleich: http://www.datasheetcatalog.net/datasheets_pdf/U/4/2/2/U4224B.shtml Das ist mir etwas zu hoch, davon abgesehen verfüge ich nicht über die Ausrüstung von mehreren tausend Euronen wie Oszi und F-Generator... Johann
Hi, hast du mal im Forum gesucht? ICh hatte da mal was geschrieben, was mir einen theoretisch Idealen Empfänger realisiert: Du musst das Empfangssignal mit der zeitinvertierten Impulsantwort deines Sendeformfilters falten und zum Abtastzeitpunkt abtasten. Das machst du natürlich mit 0 und mit 1 und kommst zu zwei Ergebnissen, die dir eigentlich aufschluss über den Wert des gesendeten Bits geben. Nennt sich Signalangepasster Filter (SAF). Implementiert hier: Beitrag "DCF77 Uhr, zum X.ten Mal, jetzt mit SAF" Nachzulesen. z.B. im Nachrichtenübertragungsskript von Prof. Noll, Tu-Berlin. Ansonsten Schoenes Projekt. Vielleicht erläuterst du hier in möglichster kürze, wie du dein Signal aufbereitest, um die Qualität (Ich vermute, du redest vom Signal Rausch Abstand SNR) zu verbessern? Den Code wollte ich mir deswegen nicht gleich reinziehen müssen. grüße, Clemens
Angehängte Dateien:
-

haar-faltung.gif
110 KB
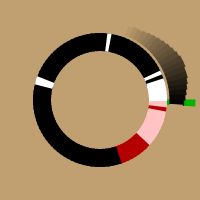
sum wrote: > Hi, > > hast du mal im Forum gesucht? ICh hatte da mal was geschrieben, was mir > einen theoretisch Idealen Empfänger realisiert: > Du musst das Empfangssignal mit der zeitinvertierten Impulsantwort > deines Sendeformfilters falten und zum Abtastzeitpunkt abtasten. Das > machst du natürlich mit 0 und mit 1 und kommst zu zwei Ergebnissen, die > dir eigentlich aufschluss über den Wert des gesendeten Bits geben. Nennt > sich Signalangepasster Filter (SAF). Implementiert hier: > Beitrag "DCF77 Uhr, zum X.ten Mal, jetzt mit SAF" Ich hab zum Falten zyklische Haar-Wavelets gewählt, das ist am einfachsten zu impementieren und passt auf das Signal. > Ansonsten Schoenes Projekt. Vielleicht erläuterst du hier in möglichster > kürze, wie du dein Signal aufbereitest, um die Qualität (Ich vermute, du > redest vom Signal Rausch Abstand SNR) zu verbessern? Den Code wollte ich > mir deswegen nicht gleich reinziehen müssen. Den Fred hier hatte ich nicht weiter verfolgt, weil offenbar niemand sonst Probleme mit schlechtem DCF-Empfang hat, und ein Neustart der Empfänger-Software als probates Mittel bei nem schlechten Bit üblich ist. In meinem Link oben hab ich ein bisschen was geschrieben, ist aber noch unvollständig. Die Aufbereitung geht in 3 Schritten: -- Sekunden-Sync und Bit-Erkennung Über zyklische Faltung wie gesagt, das kleinste Problem -- Minuten-Erkennung Ist bei miesem Signal ebenfalls problematisch, weils viele falsche Minuten-Marken hat. Geht ebenfalls über Faltung, wobei man als Nebenprodukt das wichtige Bit 21 (Minute mod 2) sicher bestimmen kann. -- Fehlerkorrektur Ist gut möglich wegen der hohen Redundanz der DCF-Info. Man darf sich nur nicht von den eingestreuten Minuten-Marken wurres machen lassen. Bei den Daten in http://www.gjlay.de/pub/dcf77/konzept.html sind 1/4 bis 1/3 der empfangenen Bits Schrott. Warum es nicht ratsam ist, die Toleranzen für die Bits hoch zu schrauben, hab ich dort erklärt. Würd mich mal interessieren, was Dein Algorithmus zu dem Datensatz sagt. Johann
Also, nachdem ich nun den Term "Haar Wavelets" gefunden habe, kann ich nur sagen, dass ich die auch verwendet habe. Denn die 0 und die 1 sind ja bekanntlich einfach nur rechteckimpulse unterschiedlicher länge. Passt also als zeitlich invertierte impulsantwort des sendeformfilters. Wenn du den ausgang der Faltungen anschaust, erhälst du Dreieck/Trapez-ähnliche Signalformen. Anhand der Dreiecksspitzen und der Trapezdeckel kannst du den Abtastzeitpunkt erzeugen (Bit Synchronisation), die fehlende Absenkung kannst du wie in deinem Link gesagt ganz gut erkennen, wenn keine Dreieck/Trapezform vorhanden ist. Soweit ich mich entsinne, war der Empfang bei mir nicht ideal, das Ausgangssignal meines Empfängermoduls hatte viele "Prellungen", ähnlich wie an Tastern, Spikes, die eben störungen wiederspiegeln. Dennoch konnte ich mit dem Empfang von mind. 3 oder 5 Datensätzen, von denen mehr richtig als falsch sein mussten, nach 5-10 min. die Uhrzeit sicher empfangen, Die Uhr ist mit dieser SW bei mir seit dem Beitrag (8/06) in Betrieb und hat bisher immer die Uhrzeit angezeigt und nie eine falsche angezeit - nagut ich hab auch nich immer davor gesessen. MIch würde durchaus interessieren, was die Uhr bei deinem Signal anzeigt... Die restlichen Fehlerkorrekturen die du vorschlägst beruhen ja auf der Charakteristik der übertragenen daten. Diese korrekturen geschehen ja erst nach der Entscheidung 0 oder 1. Mein Ansatz war halt, schon vorher dafür zuu sorgen, dass die Entscheidung 0 oder 1 entsprechend richtig ist. Grüße, Clemens
Angehängte Dateien:
-

dcf-10ms-pulses-ec.png
9,2 KB
{kind=link}
{kind=link}
sum wrote: > Also, nachdem ich nun den Term "Haar Wavelets" gefunden habe, kann ich > nur sagen, dass ich die auch verwendet habe. Denn die 0 und die 1 sind > ja bekanntlich einfach nur rechteckimpulse unterschiedlicher länge. > Passt also als zeitlich invertierte impulsantwort des sendeformfilters. So verrät jeder den Stall, aus dem er kommt. Der eine aus der Mathe und der andere aus der E-Technik ;-) > MIch würde durchaus interessieren, was die Uhr bei deinem Signal > anzeigt... Demnächst kommt die Software bei nem Kumpel in eine Mutteruhr. Falls ne Zeit falsch ist wegen Progammierfehler, tickern dann überall die Uhren los, so daß man falsche Zeit schnell mitbekommen würde :-) Für das Bild (zeigt 4 Stunden) gelang einmal der Abgleich aller 3 Zeit-Komponenten Minute, Stunde und Datum. Allerdings hatte ich noch keine Fehlerkorrektur/-erkennung für Minuten-Parity drinne. > Die restlichen Fehlerkorrekturen die du vorschlägst beruhen ja auf der > Charakteristik der übertragenen daten. Diese korrekturen geschehen ja > erst nach der Entscheidung 0 oder 1. Mein Ansatz war halt, schon vorher > dafür zuu sorgen, dass die Entscheidung 0 oder 1 entsprechend richtig > ist. Die Frage ist ja nicht wie bei Hamlet 0 oder 1. Was machst Du zum Beispiel mit einem Puls der Länge 130ms oder 3ms? Erster ist sehr wahrscheinlich eine 1 und zweiter wahrscheinlich eine 0, aber darauf bauen würd ich nicht. Von daher muss man auch nicht-identifizierbare Bits "?" zulassen, um die Sekunden-Synchronisation nicht zu verlieren. Durch die Fehler-Korrktur sammelt man die Zeitinfo über mehrere Minuten und füllt immer mehr unbekannte Bits auf, bis schliesslich alle zusammen sind. Bei erkannten 0/1-Widersprüchen kann man das entsprechende Bit auch auf "?" setzen. Und das Verfahren muss sorgfältig durchdacht werden, um Fehlerausbreitung zu vermeiden. Erzwingt man für jedes Bit einen der Werte 0,1 oder M-Marke, wird man bei schlechtem Signal recht viele Falsch-Bits bekommen. Dadurch erhöht sich die Wahrscheinlichkeit eines falschen Zeitabgleicht deutlich, weil schon 2 Falschbits pro Parity-Bereich genügen (Range-Tests geben nur nen recht kleine Zusatzgewinn an Sicherheit). Die Faltung ist also eher ein einfaches Werkzeug, um bei Schotter-Bits nicht den Sync zu verlieren bzw. nachzuregeln; daß man den Wert eines Bits dabei rausbekommt ist fast nur noch ein angenehmer Nebeneffekt. Der betriebene Aufwand hängt natürlich auch mit der Empfangslage zusammen, und selbstverständlich will man nicht mehr AUfwand treiben als nötig. Bei miesem Empfang dauert alleine die Minuten-Synchronisation schon fast 10 Minuten. Die Faltungen sind der kleinste Teil des Programms, und ich bin noch am überlegen, was ich wie optimieren kann, weil je nach Verfahren viel Code gebraucht wird (1-3kByte).
Meiner Meinung nach ist ne FehlerKORREKTUR beim DCF-Signal ziemlich sinnfrei. Ich meine, außer ner grob gewählten Parität hab ich keine Ansatzpunkte, irgend nen Fehler zu korrigieren. Sinnvoller finde ich es, dafür zu sorgen, dass nur korrekte Datenrahmen auch ausgewertet und übernommen werden -- für die restliche Zeit muss halt eine freilaufende Uhr sorgen. Die Prüfung auf korrekten Empfang hab ich mal Idiotensicher auf folgende Weise umgesetzt: 1. Beim Empfang der Datenbits wir deren Länge von oben und unten geprüft. Ich versuchs mal als ASCII-Art auszudrücken:
1 | | zu kurz | Bit 1 | undefiniert | Bit 0 | zu lang |
2 | +-----------------------------------------------------------> t |
2. Tritt ein Timeout auf, und sind bislang weniger als 59 Bits empfangen worden, führt das zum Neustart. 3. Werden mehr als 59 Bits empfangen, führt das auch zum Neustart 4. Es werden die Informationen aus dem Rahmen gewonnen (Minute, Stunde etc.). Dabei werden die mitgelieferten Paritätsbits geprüft. 5. Die Informationen werden einer Bereichsprüfung unterzogen (beim Tag des Monats wird vorher mit Berücksichtigung von Schaltjahren die Maximalzahl errechnet). 6. Der zerpflückte Rahmen wird zwischengespeichert und dann mit den folgenden Rahmen verglichen. Erst nach einer bestimmten Zahl von korrekten, aufeinanderfolgenden Rahmen werden die Daten dann übernommen. Die Prüfung berücksichtigt dabei Szenarien wie Stunden-, Tages- oder Monatswechsel entsprechend.
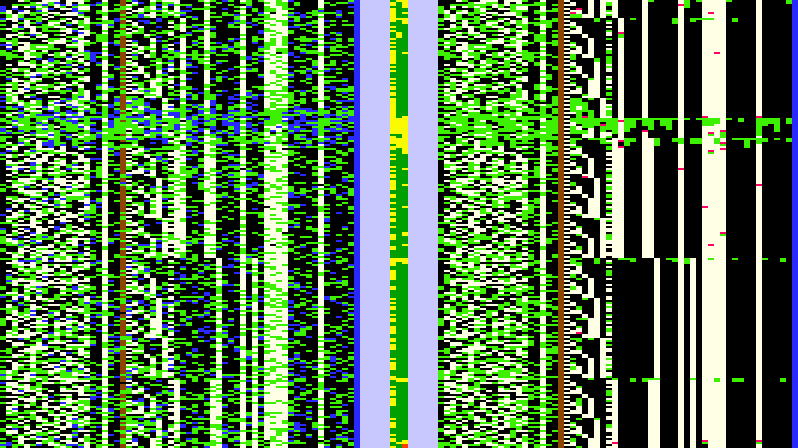
Johann L. wrote: > Für das Bild (zeigt 4 Stunden) gelang einmal der Abgleich aller 3 > Zeit-Komponenten Minute, Stunde und Datum. Tippfehler. bei dem Bild war es viel öfter, nämlich immer dann, wenn der Mittelbalken ganz grün ist. Der Mittelbalken sind die 3 Parity-Bits für den rechten Block: grün=ok, gelb=unbekannt, rot=Parity-Fehler erkannt. Der linke Block stellt die Original-Daten dar, der rechte Block die gleichen Daten nach Fehlerkorrektur.
Sven Pauli wrote: > Meiner Meinung nach ist ne FehlerKORREKTUR beim DCF-Signal ziemlich > sinnfrei. Ich meine, außer ner grob gewählten Parität hab ich keine > Ansatzpunkte, irgend nen Fehler zu korrigieren. Das Parity dient der Fehlererkennung und nicht der Fehlerkorrektur, kann aber selbst fehlerkorrigiert werden. Also nicht verwirren lassen... > Sinnvoller finde ich es, dafür zu sorgen, dass nur korrekte Datenrahmen > auch ausgewertet und übernommen werden -- für die restliche Zeit muss > halt eine freilaufende Uhr sorgen. Daß eine alles-oder-Nichts Ansatz nicht zum Ziel führt bei schlechter Empfangslage habe ich oben bereits ausführlich erklärt. Natürlich werden nur als korrekt eingestufte Datensätze in die interne Zeit übernommen und natürlich läuft eine DCF-unabhängige Zeitbasis im Hintergrund und natürluch funktioniert das bei 1A-Signal und man wird keinen Aufwand treiben. Mit vollen Hosen ist eben gut Stinken ;-) und in all meinen bisherigen DCF-Uhren hab ich mich auch nie mit dem Thema auseinandersetzen müssen. Aber geh einfach mal davon aus, daß mindestens 25% der empfangenen Bits nach Deiner Methode weder als "0" noch als "1" einstufbar sind. Die erwartete Zeit, bis bei so einem Signal alle Bits einer Minute einmal korrekt empfangen wurden, ist mindestens
Bei 40 Sekunden -- was für die Zeitinfo ausreicht -- sind's zwar nur noch 10 Wochen, aber eine solche DCF-Software ist damit wie Du gerne sagst "sinnfrei". Weil die Bit-Ausbeute pro Minute nicht allzu prickeln ist, muss man die Bits eben über mehrere Minuten einsammeln. Schreibt man die Minuten zeilenweise untereinander, dann ist die Redundanz in waagerechter Richtung wie Du korrekt bemerkst sehr gering und kann nicht zur Fehlerkorrektur herangezogen werden (hat nur Hamming-Abstand 1). Die damit realisierbare Fehlererkennung ist nicht sehr stark, kann aber durch die landläufigen Plausibilitätstest (Bereich und BCD-Format) verbessert werden. In senkrechter Richtung ergibt sich hingegen eine sehr hohe Redundanz. Je nach Gusto kann diese zur Fehlerkorrektur oder -erkennung genutzt werden, was aber Plausibilitäts-Tests auf oberster Ebene m.E. nicht überflüssig macht.
Ich hab mal versucht, mich in die Theorie von Haar-Faltungen einzulesen -- nun raff ich auch was ihr hier alle wollt -- entsprechend war mein Post weiter oben bissi vorschnell (tschuldigung), aber nun gut. Angenommen, man versucht einen Empfang Fehlerkorrektur durch Haar-Faltungen, dann werden zunächst zyklisch in jeder Sekunde die Abtastwerte vom Funkempfänger gefaltet, wodurch das Signal aus Mainflingen in drei diskrete Zustände (1, 0 und indeterminant) überführt wird. Über die Empfangsdauer entsteht dadurch ein eindimensionales Feld, ja? Der Beginn eines jeden Feldes sei bekannt (praktisch die fehlende Absenkung des Trägers, also unterm Strich eine Zeitüberschreitung oder sowas). Eine Anzahl dieser Felder wird nun nebeneinander angeordnet (es entsteht ein zweidimensionaler Vektor) und es wird wiederum gefaltet, um eventuelle Fehlstellen (also indeterminante Zustände) zu interpolieren, wenn man es denn so formulieren möchte.
1 | n | 1 | 2 | 3 | 4 | z |
2 | --+---+---+---+---+--- |
3 | 0| 0 0 0 0 | |
4 | 1| 1 0 0 1 | |
5 | 2| 1 1 1 1 | |
6 | 3| 0 0 0 1 | |
7 | .| . . . . | |
8 | .| . . . . | |
9 | .| . . . . | |
10 | 56| 0 0 ? 1 | |
11 | 57| ? 1 ? 0 | |
12 | 58| ? 0 1 1 | |
13 | 59| ? ? ? ? | |
Nach Empfang eines neuen Feldes rücken die drei gespeicherten Felder um eine Stelle weiter, wobei das älteste der Felder verloren geht und das gerade empfangene an erster Stelle erscheint. Die Spalte z soll das Ergebnis der Faltung über die Zeile aufnehmen und darf keine indeterminanten Zustände mehr enthalten. Schließlich werden die z-Spalten nach DCF-Manier ausgewertet, die Paritätsbits geprüft und all das damit angestellt, was ich in meinem ersten Post erwähnt hatte. Wobei zu überlegen wäre, ob sich die Kontinuität (auf Minute 4 folgt Minute 5) nicht auch schon während der letzten Faltung prüfen ließe. Hab ich das Prinzip soweit einigermaßen ... verstanden?
Hoi Hey, deine Beschreibung, Johannes, ist sehr schön formuliert: "Die bits einsammeln". Natürlich erhält man dann eine deutlich bessere Signalqualität und kann Fehler korrigieren, wenn der Hamming-abstand stimmt. Nur: wonach misst du die "Länge" der Absenkungen? Wenn du von x oder y ms redest, denke ich immer gleich (tschuldigung), an DCF77->INT0, was natürlich totaler quatsch ist. Insofern: deine Iddee, die ich jetzt endlich verstanden zu haben scheine, ist super. Ich hoffe, du legst auch die richtigen Grundlagen bei der Entscheidung 0/1/M/?. Vorbereitung ist die Halbe Arbeit. Für mich ist jetzt noch folgende Frage interessant: Wie bewertest du das Ausgangssignal des Integrators, wie lang integriert dein INtegrator (ich vermute du wirst auch einen Kammfilter/fliessender Mittelwert nehmen), und woher nimmst du den abtastzeitpunkt. Vielleicht erklärst du das noch kurz (oder habe ich es überlesen? ich zweifle langsam an mir selbst...) oder nimmst hier noch ein paar Anregungen von den Ideen aus meinem Code (Link sieze oben). Grüße, Clemens
Sven Pauli wrote: > Ich hab mal versucht, mich in die Theorie von Haar-Faltungen einzulesen > -- nun raff ich auch was ihr hier alle wollt -- entsprechend war mein > Post weiter oben bissi vorschnell (tschuldigung), aber nun gut. > > Angenommen, man versucht einen Empfang Fehlerkorrektur durch > Haar-Faltungen, dann werden zunächst zyklisch in jeder Sekunde die > Abtastwerte vom Funkempfänger gefaltet, wodurch das Signal aus > Mainflingen in drei diskrete Zustände (1, 0 und indeterminant) überführt > wird. Über die Empfangsdauer entsteht dadurch ein eindimensionales Feld, > ja? Soweit korrekt, nur sind es 4 Zustände. Der 4te ist die Minuten-Marke, abgekürzt als M oder #. > Der Beginn eines jeden Feldes sei bekannt (praktisch die fehlende > Absenkung des Trägers, also unterm Strich eine Zeitüberschreitung oder > sowas). Nein, keine Zeitüberschreitung. Wie in der Animation "haar-faltung.gif" zum Haar-Wavelet wird dieses verwendet, um das Maximum zu finden. Wenn das Maximum klein ist, zB kleiner als 2 bei 100 Samples/Sekunde, dann ist das Bit ein #. > Eine Anzahl dieser Felder wird nun nebeneinander angeordnet (es entsteht > ein zweidimensionaler Vektor) und es wird wiederum gefaltet, um > eventuelle Fehlstellen (also indeterminante Zustände) zu interpolieren, > wenn man es denn so formulieren möchte. Nein. Wenn Bit n von Minute m ein 0 ist und zwei Minuten später ist es eine 1, kannst Du nicht interpolieren, um Bit n von Minute m+1 zu bestimmen (übrigens auch nicht, wenn die Werte beide 0 sind). > Nach Empfang eines neuen Feldes rücken die drei gespeicherten Felder um > eine Stelle weiter, wobei das älteste der Felder verloren geht und das > gerade empfangene an erster Stelle erscheint. Jepp. Zuerst hatte ich 3 Minutel à 60 DCF-Bits gespeichert (jedes DCF-Bit kann wie gesagt 4 Werte haben. Ist also eher ein double Bit). Es hat sich aber gezeigt, daß ich das nicht brauche und 2 Minutensätze reichen. Minute m wird fehlerkorrigiert aus Minute m-1, das genügt zum Aufsammeln. > Schließlich werden die z-Spalten nach DCF-Manier ausgewertet, die > Paritätsbits geprüft und all das damit angestellt, was ich in meinem > ersten Post erwähnt hatte. > Hab ich das Prinzip soweit einigermaßen ... verstanden? Bis auf das, was in der Fehlerkorrektur passiert. Die Werte der DCF-Bits aus der Faltung zu erhalten stellt zwar genau genommen schon eine Art der Fehlerkorrektur dar (Mainflingen sendet nur exakt 100ms oder 200ms oder keine Absenkung, sobald man etwas anderes als 0 oder 1 akzeptiert, ist das ne Fehlerkorrektur). Das meine ich aber nicht, wenn ich von "Fehlerkorrektur" rede. Die Fehlerkorrektur bzw. das Flicken unbekannter DCF-Bits ist unabhängig davon, wie man an diese Bits herankommt. Die Fehlerkorrektur ist blankes Bit-Gefummel. Nehmen wir mal an, es sind folgende Werte für DCF-Bits ab Position 21 (Minute.0) empfangen worden:
1 | 21 22 23 24 25 26 |
2 | ------------------------- |
3 | m ? ? 0 1 ? 1 |
4 | m+1 ? 1 0 ? ? 0 |
5 | ------------------------- |
6 | m+1 ? 1 0 1 ? ? |
Das wäre ein schlechtes Signal, zeigt aber das Prinzip: Weil Bit 22 von Minute m+1 gleich 1 ist, müssen alle höherwertigen Bits von m und m+1 übereinstimmen. Zunächst kann von m nach m+1 kein Reset stattgefunden haben (der Reset-Wert der Minute ist 0, und Bit 22 ist 1). Damit ist die Minute von m nach m+1 um 1 erhöht worden. Daraus folgt, daß alle Bits ab Bit 23 gleich sein müssen (überleg Dir, warum). Daher kann Bit 24 übernommen werden. Bit 26 wurde gelöscht, weil es offenbar einen Übertragungsfehler gab. Bits höher als 26 können auch alle übernommen werden, ausser Minuten-Parity. Diese Korrektur geschieht bei mir nur auf Bit-Ebene. Es ist nicht ratsam, zu viel Kenntnis zu nutzen. Beispiel: Minute m wurde als 19 übertragen. Fehlt Minute m+1, dann muss der Wert 20 sein. Verwendet man dieses Wissen zur Korrektur, raubt man sich eine wichtige Möglichkeit zur Fehlererkennung. Gerade bei schlechtem Signal sind Falsch-Bits relativ häufig, und eine Fehlererkennung also doppelt wichtig. Wenn man aber 20 berechnet aus 19+1, wird der Fehler-Check trivial. Zudem ergibt sich die Frage: Was, wenn im obigen Beispiel Bit22 falsch übertragen wurde? Dann würde man daraus viele falsche Schlussfolgerungen ziehen. Ein Weg aus dem Dilemma wäre, bei mehr als einem Falschbit pro Datensatz den Satz komplett zu löschen. Ein anderer Ausweg ist, sich nicht auf unsichere Voraussetzungen zu verlassen. Bit 0 der Minute wechselt mit jeder Minute und ist jede 2-te Minute 1. In allen ungeraden Minuten kann man also alle Bits ausser Bit 0 und Minute-Parity aus der Vorminute übernehmen bzw. nen Test auf Bitfehler machen, wenn beide Bits ungleich ? sind. Und man weiß in dem Fall, daß Minute-P wechseln muss. Dieser einfache Fall ist sehr leicht zu implementieren. Er korrigiert nicht so agressiv wie der Algorithmus, der Grundlage für die Daten in der Visualisierung "dcf-10ms-pulses-ec.png" war, aber bringt eine deutliche Verbesserung der Datenlage. Wenn man nicht korrigieren möchte, bietet er immer noch die Möglichkeit der Erkennung von Falschbits, die deutlich besser ist als sich nur auf Parity zu verlassen. Zugleich bleiben genügend Redundanzen, damit auf höherer Ebene Plausibilitäts-Tests nicht trivial werden aufgrund der Korrektur. sum wrote: > Hoi Hey, > > deine Beschreibung, Johannes, ist sehr schön formuliert: "Die bits > einsammeln". Natürlich erhält man dann eine deutlich bessere > Signalqualität und kann Fehler korrigieren, wenn der Hamming-abstand > stimmt. Nur: wonach misst du die "Länge" der Absenkungen? Wenn du von x > oder y ms redest, denke ich immer gleich (tschuldigung), an DCF77->INT0, > was natürlich totaler quatsch ist. Insofern: deine Iddee, die ich jetzt > endlich verstanden zu haben scheine, ist super. Ich hoffe, du legst auch > die richtigen Grundlagen bei der Entscheidung 0/1/M/?. Vorbereitung ist > die Halbe Arbeit. Was aus den Faltungen rauskommt bewerte ich ganz analog zu einer gebräuchlichen Bitlängen-Bestimung. Der Maximalwert ist implizit gegeben durch die Breite des Wavelets und muss nicht mehr getestet werden. Als Minimalwert geht Länge -2ms bis -3ms. Größer würde ich die Toleranz auf keinen Fall machen. Wie gesagt ist es besser mit ? zu leben als mit einer falschen 0 oder falschen 1. > Für mich ist jetzt noch folgende Frage interessant: > Wie bewertest du das Ausgangssignal des Integrators, wie lang integriert > dein INtegrator (ich vermute du wirst auch einen Kammfilter/fliessender > Mittelwert nehmen), und woher nimmst du den abtastzeitpunkt. -- zyklisch Falten mit 100ms Haar-Wavelet -- zyklisch Falten mit 200ms Haar-Wavelet -- (zyklisch) Falten mit 1s Haar-Wavelet, d.h alls Samples der Sekunde summieren Wenn noch kein Sek-Sync erfolt ist, wird überall gefaltet. Die Samples mehrerer guter Bits (einsortiert als DCF0 oder DCF1) werden aufsummiert, im Endeffekt also das Signal über mehrere Sekunden gemittelt. Im Idealfall sieht das so aus:
1 | ********** |
2 | * * |
3 | * ********** |
4 | * * |
5 | * * |
6 | *********** ****************************** |
Damit erkennt man den Sekundenanfang und weiß danach, wo zu falten ist. Nach dem Sekunden-Sync bewerte ich auch anders, hier mal als C-Snip
1 | #define LEN_SEC 100
|
2 | // Länge einer Sekunde, d.h. Anzahl Samples pro Sekunde
|
3 | // Muss < 127 sein
|
4 | |
5 | #define LEN_0_MIN 7
|
6 | #define LEN_0 9
|
7 | |
8 | #define LEN_1_MIN 17
|
9 | #define LEN_1 19
|
10 | |
11 | uint8_t rate_bit (void) |
12 | {
|
13 | haar_eval_t * r = timeinfo.dcf.eval; |
14 | uint8_t mode = timeinfo.dcf.synced_sec ? HAAR_0_START : HAAR_0_ALL; |
15 | haar3 (summ, mode, r); |
16 | |
17 | // Jeweils Maximum (und Index) für zykl. Haar-Faltung mit Wavelet-Breite
|
18 | uint8_t r0_max = r[0].max; // 1s |
19 | uint8_t r1_max = r[1].max; // 100ms |
20 | uint8_t r2_max = r[2].max; // 200ms |
21 | |
22 | if (!timeinfo.dcf.synced_sec) |
23 | {
|
24 | if (r2_max >= LEN_1_MIN) |
25 | if ((uint8_t) (r0_max-r2_max) <= 6) |
26 | return 1; |
27 | |
28 | if (r1_max >= LEN_0_MIN) |
29 | if ((uint8_t) (r0_max-r1_max) <= 6) |
30 | if ((uint8_t) (r2_max-r1_max) <= 3) |
31 | return 0; |
32 | }
|
33 | else
|
34 | {
|
35 | if (r2_max >= LEN_1_MIN) |
36 | if ((uint8_t) (r0_max-r2_max) <= 10) |
37 | return 1; |
38 | |
39 | if (r1_max >= LEN_0_MIN) |
40 | if ((uint8_t) (r0_max-r2_max) <= 10) |
41 | if (r2_max <= 12) |
42 | return 0; |
43 | |
44 | if (r2_max == 0) |
45 | if (r0_max <= 5) |
46 | return 2; |
47 | }
|
48 | |
49 | return 3; |
50 | }
|
51 | |
52 | // 0 = 0
|
53 | // 1 = 1
|
54 | // 2 = Minuten-Marke
|
55 | // 3 = Schrott
|
D.h. ich schau auf Mindestlängen (Maxlängen sind gegeben durchs Wavelet). Ausserdem erlaub ich ausserhalb des Wavelets nur ne gewisse Anzahl an Spikes. Die Anzahl Spikes ausserhalb des Ansenkung erhält man einfach, indem man das Faltergebnis von der Gesamtsumme über 1 Sekunde abzieht. Grüß, Johann
Hallo Johann, nun war ich ein paar Tage nicht hier und schon schreibst du dir die Finger wund! Sehr schön. Aber leider kann ich aus deinem Code-Beispiel nicht so richtig schlau werden, dafür sind die Abkürzungen zu kryptisch. ICh denke aber, du hast dir schon sehr wohl Gedanken über Toleranz-Schwellen, Abtastzeitpunkt, etc gemacht... Deine Erklärungen zur Bit-Sammlung/Korrektur, nachdem auf 0/1/#/? entschieden wurde, sind einleuchtend. Man kann das Prinzip ja auch ganz gut in den Grafiken Erkennen (Weiter oben). Meinst du, es ist möglich, diese Vorgehensweise (Wenn Minutenbit X = 0 dann Minutenbit Y = 1 oder auch m-1 und m+1 und soweiter) in eine Formulierungsform zu bringen, die durch den Mikrocontroller selbst gelesen (und verstanden) werden kann? Ich denke da an eine Art Tabelle im Flash, in der die Informationen über die Zusammenhänge der Bits zueinander von aufeinanderfolgenden Datensaetzen und von Bits eines Datensatzes untereinander gespeichert sind, die du dann in eine Funktion speist, die dir nach Möglichkeit gleich die fehlerkorrigierte Version ausspukt. Also mal ein Beispiel, was nichts mit DF77 zu tun hat: Du Hast ein Display und implementierst ein Menu, das kann Strings, WErte anzeigen, auf die Tasten gibt es Reaktionen und die Reaktionen können Wieder MEnues aufrufen oder Werte verändern. Das könnte man schön in eine Struktur packen, die dann genau dieser Funktion (Menu) übergeben wird und die Funkion Menü hat mit dem eigentlichen Menü nichts mehr am Hut. Um dein Menü zu ändern brauchst du nur die Sturktur ändern (im Flash). Die Idee ist, dass es A) einfach zu formulieren ist (eine Struktur im Flash ablegen sollte nicht so schwer oder Fehleranfällig sein) und der Code (das, was normalerweise Fehleranfällig ist - bei mir zumindest), ist mehr oder minder regulär, d.h. es gibt keine großen und vor allem nicht so leicht testbaren If-Verschachtelungen. Die Interpretierfunktion würde man dann mit einem Stückchen Daten zum Testen füttern, die praktisch alles Abdecken. Durch die (gründliche und vor allem Einfache) Formulierung des eigentlichen Inhalts in einer Tabelle/Struktur sollten dann keine Fehler mehr kommen. Abgesehen davon, dass eine Tabelle schneller leichter und einfacher zu programieren ist, als unendlich viele IF-Then-Else sachen... Vielleicht fällt dir ja etwas gutes ein, ich habe da erstmal an sowas wie Bitmuster gedacht, die mit den Daten gefaltet werden. Damit das alles klappt müsste man halt "ausreichend" viele Daten im Ram lagern, wobei man auch das formulativ auf die nötigen Daten reduzieren könnte (Minutenbits nur die letzten 5 minuten, Stunden nur Mittelwerte der Stunde oder sowas, damit der RAMbedarf begrenzt bleibt). Weiterhin kann man in der StrukturTabelle auch ablegen, mit welcher Frequenz gefaltet wird... Naja, ich hoffe du bekommst einen Eindruck vondem, was ich mir so dazu denke. Grüße, Clemens
sum wrote: > Hallo Johann, > > Meinst du, es ist möglich, diese Vorgehensweise (Wenn Minutenbit X = 0 > dann Minutenbit Y = 1 oder auch m-1 und m+1 und soweiter) in eine > Formulierungsform zu bringen, die durch den Mikrocontroller selbst > gelesen (und verstanden) werden kann? Ich denke da an eine Art Tabelle > im Flash, in der die Informationen über die Zusammenhänge der Bits > zueinander von aufeinanderfolgenden Datensaetzen und von Bits eines > Datensatzes untereinander gespeichert sind, die du dann in eine Funktion > speist, die dir nach Möglichkeit gleich die fehlerkorrigierte Version > ausspukt. Möglich ist so ein abstrakter Ansatz sicher, aber für Hänflinge wie kleine AVR tendiere ich eher dazu, Resourcend-schonend zu programmieren. Ausserdem dürfte so eine Fehlerkorrektur sehr speziell sein und ausserhalb von DCF/HBG keine Anwendung finden. Die sehr einfachen Regeln hatte ich in http://www.gjlay.de/pub/dcf77/konzept.html#fehlerkorrektur beschrieben. Dabei muss man darauf achten, nicht zu viel Wissen zu nutzen, weil sonst wie gesagt die Konsistenz-Tests trivial werden oder Fehlerausbreitung stattfindet. Die Regel würde ich so zusammenfassen:
1 | Wenn eine 1 in Minute oder Stunde empfangen wird, |
2 | dürfen alle höherwertigen Bits der Vorminute |
3 | übernommen werden. |
Das hat den Vorteil, daß es trivial einfach ist und keine große Arithmetik gebraucht wird. Ausserdem kommt es sehr viel häufiger vor, daß 0-statt-1-Fehler auftreten als 1-statt-0-Fehler, die ich praktisch nicht beobachte. Es sei denn, das Signal ist so krass, das es eh nicht auswertbar ist. Das erhöht die Sicherheit der Korrektur. Es gibt zwar auch eine Regel für 0-Bits, die ich aber wegen der zwar geringen, aber immerhin existierenden 0-statt-1-Fehler nicht anwende, weil das zu falsch-angewandter Korrektur führen würden. Nachgeschaltete Konsistenztests erkennen das zwar, aber ich verzichte dennoch darauf. > Grüße, > Clemens
Ich habe diesen Thread gerade gefunden... Unabhängig von der sehr fortgeschrittenen Diskussion kann ich anmerken, dass ich einen stark gestörten DCF-Empfang habe. Sieht aus wie ziemlich viele Fehlpulse, eine testweise angeschlossene LED ist wie wild am Blinken, statt ruhig im Sekundentakt. Mein Empfänger (eine Haussteuerung) kann locker viele Tage damit zubringen auf eine intakte Uhrzeit zu warten. Letztens habe ich das Ding entnervt mauell gestellt. Manchmal zieht er sich auch falsches Datum/Uhrzeit rein, aber glücklicherweise selten. Falls ich die Steuerung mal durch einen Eigenbau ersetze bin ich an so einem Algorithmus sehr interessiert. Das ist also kein rein akademisches Thema. Wenn jemand also so ein Signal zum Testen braucht, damit kann ich lang weg dienen. :-/ Wäre noch zu klären wie ich das aufzeichne. Als WAV? Jörg
Moin Jörg, du kannst das Signal aufzeichnen, indem du den Demodulatorausgang (also hinter der Erkennung der Absenkungen) mit z.B. 1ms Taktperiode abtastest und zeilenweise (0/1) in eine Datei packst. Das ganze kann man dann gut mit Zip/Gzip packen und hier posten. Wäre aber wichtig, dass du da einige Zeit aufzeichnest (ohne Lücken), damit die Erkennung tatsächlich simuliert werden kann (einsammeln dauert halt...). Ich habe leider keinen sonderlich gestörten Empfang hier und kann damit nicht dienen. Grüße, Clemens
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.