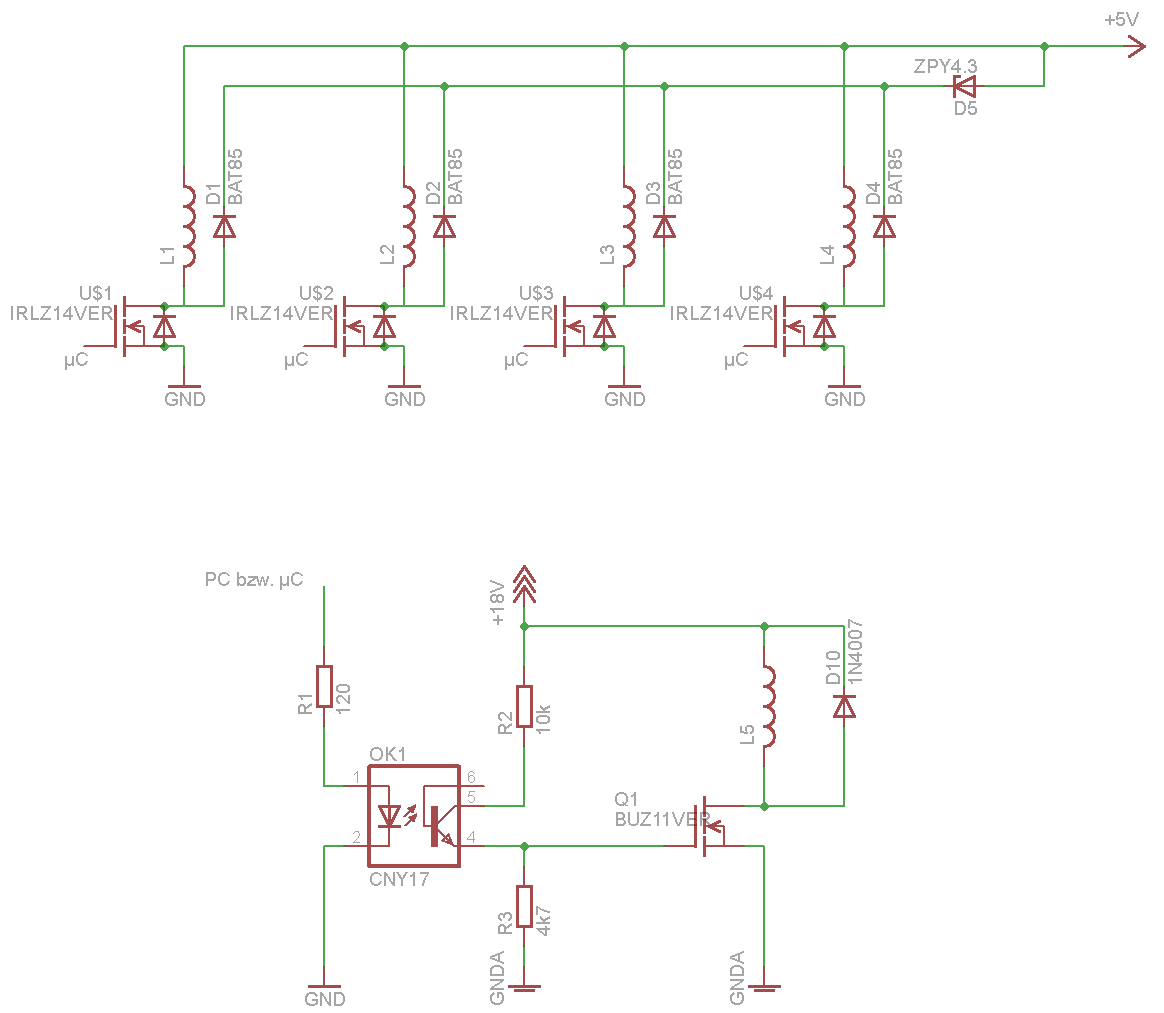
Hallo zusammen, ich bin gerade dabei, eine Steuerung für eine CNC-Fräse von LPT auf USB umzubauen. Das ganze wird letztlich ein Neubau, jedoch möchte ich einige Funktionsgruppen übernehmen. Z.b. auch den Leistungsteil für die Schrittmotorsteuerung. Bei der Analyse der vorliegenden Steuerung hab ich das angehängte Schaltbild extrahiert. Zwei Spulen bilden dabei jeweils eigentlich eine Spule mit Mittelanzapfung auf 5V. Die Dioden an den FETs (IRLZ14, http://www2.produktinfo.conrad.com/datenblaetter/150000-174999/151362-da-01-en-BUZ11A_STM.pdf) sind in die FETs integrierte Freilaufdioden. Jetzt meine Frage(n) dazu: 1. Was macht die Z-Diode da oben drin? Welchen Zweck erfüllt sie und sollte ich die in mein neues Design übernehmen oder kann ich sie weglassen? 2. Warum werden ausgerechnet SCHOTTKY-Dioden als Freilaufdioden verwendet? 3. Ich habe folgenden Schrittmotor: PKK244-01AA (http://www.orientalmotor.com/products/pdfs/SteppingMotors/2PhaseStep_B267-B288.PDF). Da sind 1.2A/Phase angegeben. Bin mir nich ganz sicher und hab auch den Motor noch nicht ausgemessen, deswegen vermute ich mal, dass das dann auf 600mA/"halbe Phase" (bzw. im Schaltbild halt dann pro Spule) rausläuft. So, die müssen ja jetzt beim Abschalten eines FET von der zugehörigen Schottky-Diode und der Zener-Diode übernommen werden (zumindest im ersten Moment). Nun ist das eine BAT85 (http://www.nxp.com/acrobat_download/datasheets/BAT85_4.pdf) mit max. continious forward current: 200mA max. repetitive peak forward current: 300mA Zudem wird der Motor ja sogar abzüglich FET noch mit knapp 4.5V, statt der Nennspannung aus dem Datenblatt von 4V betrieben, der tatsächliche Strom liegt wohl also noch höher, als die 600mA. Ist das vertretbar oder sollte man ne andere (Schottky-)Diode verwenden oder einfach ne 1N4007 4. Würde man überhaupt keine Dioden einbauen, würde es dann nicht auch funktionieren? Dann könnte doch die Freilaufdiode im FET den Job erledigen oder? Oder hab ich da ne nächtliche Bullshit-Idee? So, und gleich noch ne Frage zur Motorsteuerung der besagten Platine. Die Steuerung erfolgt über nen Optokoppler, der direkt vom Parallelport gesteuert wird. Die Platine besitzt zwei Versorgungen: 5V für Elektronik und Schrittmotoren und 18V für den Motor der Spindel. Die sind galvanisch getrennt, deswegen der Optokoppler. Die PC-Masse is mit der Masse der 5V-Versorgung verbunden. Ich hab beim Schreiben die eigentliche Frage vergessen, aber vielleicht fällt jemandem ne Optimierung ein. Die Schaltung dazu is auch im Anhang. L5 soll mal den Motor der Spindel darstellen. Sollte man abgesehen von Sättigungseffekten im FET noch aus anderen Gründen einen Widerstand in den Steuerzweig vors Gate setzen? Viele Fragen und ich bin für jeden Hinweis dankbar, auch, wenns nur zu einzelnen Punkten ist. Schöne Grüße Robert
Angehängte Dateien:
-

Stepper_Motor.png
8,4 KB
moin moin,
>>Steuerung für eine CNC-Fräse von LPT auf USB
wer schreibt die Software für USB?
mfg
Pieter
die gibts beim Ostermann. NC- Pilot, so sie schon fertig ist. Gruß
@Pieter >>>Steuerung für eine CNC-Fräse von LPT auf USB > > wer schreibt die Software für USB? Hallo Pieter, zugegeben, berechtigte Frage. Das wird erstmal ne proprietäre Eigenentwicklung, die zunächst erstmal Bohren können soll und einfache CAM-Dateien, wie z.B. Excellon verarbeiten soll. Bei der Windows-Programmierung bin ich Gott sei Dank nicht ganz auf mich allein gestellt, da hab ich jemanden zur Hand. Bin eher für die Hardwareseite, sowie die µC-Software verantwortlich. @Stephan Danke für den Hinweis auf die Seite von Thorsten Ostermann. Kannte ich bisher noch nicht. Im Prinzip sieht mein Projekt hier ganz ähnlich aus. Die "Intelligenz" steckt in der PC-SW und der µC übernimmt im wesentlichen die Schrittsteuerung und bekommt noch ne manuelle Steuerung über Taster. Die Kommunikation mit dem PC geht bei mir dann über nen FT232R. Jemand ne Idee zu meinen Fragen? Grüße Robert
moin moin,
>>Bin eher für die Hardwareseite ..... verantwortlich.
sorry, aber wenn Du solche Grundlagenfragen stellst, ist diese Aufgabe
bestimmt noch etwas zu groß.
Klar, sagt sich einfach. Vorallem wenn man als kleines Kind lieber an
einem Transistor, als an einem Nuckel lutschen wollte ;-)
zu 1.
Ohne die ZD wird die Rückschlagspannung der Spulen kurzgeschlossen, mit
ZD wird die Spule auf 4.3V entladen.
Bei meiner Schaltung fehlt diese Diode. Ob der Z-Strom von 260mA
ausreichend ist, will ich mal nicht nachrechen.
zu2.
SCHOTTKY-Dioden sind schneller und haben kleinere Flußspannungen.
zu3.
google mal Halbschritt...bipolar/unipolar Betrieb.
Bei Halbschritt sollten beide Spulen mit ca. 1,4 I bestromt werden.
Die Frage nach der Nennspannung ist falsch. Es muß einen Stromsteuerung
vorhanden sein.
zu4.
Freilaufdiode im FET ...nur als Notlösung.
Die Schaltung selbst ist eine Notlösung, 5V zur Schrittmotoransteuerung
ist ULK.
Als Treiber verwende ich TB6560 bei 24V.
Anbei mal als Demo ein G-Code-Viewer. Die selben Rechnungen laufen bei
mir auf einem 8051ED2 und steuern die Fräse dann direkt an.
Mit Gruß
Pieter
Hallo Pieter, danke für deine umfangreiche Antwort. > sorry, aber wenn Du solche Grundlagenfragen stellst, ist diese Aufgabe > bestimmt noch etwas zu groß. > Klar, sagt sich einfach. Vorallem wenn man als kleines Kind lieber an > einem Transistor, als an einem Nuckel lutschen wollte ;-) Nunja, ganz so schlimm isses auch nich. Mit Schrittmotorsteuerung hab ich mich eben bisher noch nicht beschäftigt. Hilft außerdem sowieso nix, gibt keinen anderen, der die Aufgabe übernehmen kann, muss also ich machen. Und irgendwie muss man damit ja mal anfangen. > zu 1. > Ohne die ZD wird die Rückschlagspannung der Spulen kurzgeschlossen, mit > ZD wird die Spule auf 4.3V entladen. > Bei meiner Schaltung fehlt diese Diode. Ob der Z-Strom von 260mA > ausreichend ist, will ich mal nicht nachrechen. Ok, das macht die Z-Diode. Das hab ich mir schon auch so überlegt, aber warum sie das machen muss, ist mir noch nicht klar. Denn ohne die ZD wäre da ja immer noch die Flussspannung der Schottky-Diode und mir sind eben bisher nur Schaltungen mit EINER pn-Freilauf-Diode untergekommen. Und dass Du diese Diode auch nicht verwendest und ich mal davon ausgehe, dass es funktioniert, scheint es mir, als sei sie auch nicht zwingend erforderlich. > zu2. > SCHOTTKY-Dioden sind schneller und haben kleinere Flußspannungen. Auch das ist mir bewusst, jedoch ist mir auch hier nicht ganz klar, warum das notwendig ist. Is hier schneller einfach besser? Beim Spindelmotor wird ja auch nur ne einfach 1N4007 verwendet. > zu3. > google mal Halbschritt...bipolar/unipolar Betrieb. > Bei Halbschritt sollten beide Spulen mit ca. 1,4 I bestromt werden. > Die Frage nach der Nennspannung ist falsch. Es muß einen Stromsteuerung > vorhanden sein. Hab meine Hausaufgaben gemacht ;-) Die Stromsteuerung scheint mir eigentlich auch die bessere Variante zu sein, aber wenn ich den Motor mit Nennspannung betreibe (was ja annähernd der Fall ist), muss es auch nicht unbedingt ne Stromsteuerung sein, wenn ich da richtig informiert bin. Ich werde zunächst erstmal die Variante verwenden, die auch auf der alten Steuerplatine war, behalte es jedoch im Auge, da später mal eine Stromsteuerung draus zu machen. > zu4. > Freilaufdiode im FET ...nur als Notlösung. > Die Schaltung selbst ist eine Notlösung, 5V zur Schrittmotoransteuerung > ist ULK. > Als Treiber verwende ich TB6560 bei 24V. Hmm... naja, s. 3. > Anbei mal als Demo ein G-Code-Viewer. Die selben Rechnungen laufen bei > mir auf einem 8051ED2 und steuern die Fräse dann direkt an. Danke dafür. Das kann ich bestimmt gebrauchen. > Mit Gruß > Pieter Vielen Dank nochmal und Gruß zurück!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.