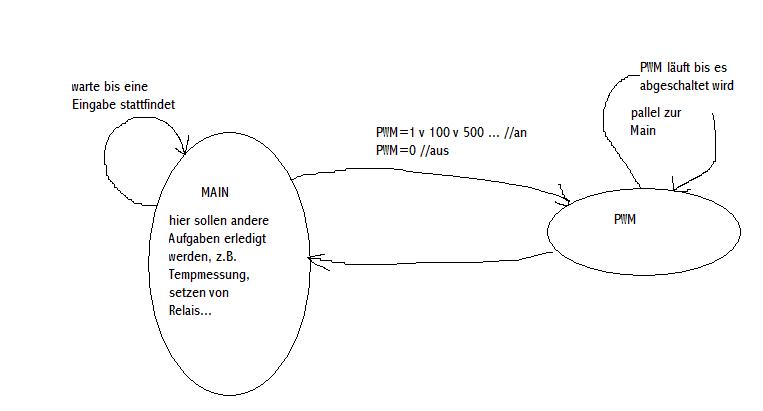
Hallo zusammen, Ist es möglich eine veränderbare PWM, parallel zur Main, aufzubauen? Wenn ja wie? In der Main sollen andere Aufgaben erledigt werden. Folgender Problemfall. Es soll eine Temperatur, in einem gewissen Bereich 10°C +/-1°C, konstant gehalten werden. Durch einen Sensor wird die akt Temp aufgenommen und durch einen Lüfter, bei dem die Drehzahl mit ner PWM geregelt werden soll, die Temp konstant gehalten werden. Die Zuluft wird von einer Kühlung bereitgestellt. Im WWW gibt es mehrere Ansetze wie man das Problem anpacken kann. Ich würde es gerne so gestallten dass während in der Main Aufgaben erledigt werden, wie z.B. Ausgabe auf nem LCD, Tempmessung, Parameter setzen ...., der Lüfter eigenständig und parallel über die PWM gehalten werden soll. Aus der Main soll lediglich der Vergleichswert für die Modulation übermittelt werden. Ich verwende dafür einen Atmega48. In der Zwischenzeit mache ich einen Beispielcode und stelle es hier rein. Vielen Dank für die Hilfe
Angehängte Dateien:
-

PWM.JPG
25 KB
So, ich habe mal das ganze auf ein Steckbrett aufgebaut. Statt dem Lüfter habe ich grad ne LED angeschlossen. Durch 4 Taster an PC0-PC3, soll in 25% Schritten die Leuchtstärke an der LED (PB1) gewählt werden. Nach einem Tastendruck, soll die gewählte Leuchtstärke z.B. 25% gesetzt werden, mit dem Wert aus der entsprechenden "IF-Schleife" in die PWM_init(), Vergleichswert setzten und wieder zurück zur Main. Währenddessen, soll die PWM-LED (PB1) mit dem übermittelten Wert dauerleuchten. Ist keine Taste gedrückt worden oder nach jedem Tastendruck, soll eine Kontroll-LED (PB5) ob man sich wieder in der MAIN befindet, blinken. Soviel zu meiner Überlegung. Nun zur Problembeschreibung: Nach dem entsprechenden Tastendruck b.B. PC1, wird zwar die LED an PB2 gesetzt aber der komischerweise der 100% PWM-Wertübermittelt Kurz gesagt die PWM-LED leuchtet mit voller Leuchtstärke. Was mache ich falsch??? Hier ist mein Code dafür.
1 | #define F_CPU 8000000UL // 8 MHz
|
2 | |
3 | #include <stdio.h> |
4 | #include <avr/io.h> |
5 | #include <util/delay.h> |
6 | #include <avr/interrupt.h> |
7 | |
8 | void PWM_init(int uewert); |
9 | int wert; |
10 | |
11 | int main() |
12 | {
|
13 | |
14 | PORTC |= (1<<PC0) | (1<<PC1) | (1<<PC2) | (1<<PC3); // PORTC = PULL-UP |
15 | |
16 | while(1) |
17 | {
|
18 | DDRB |= (1<<PB5) | (1<<PB4) | (1<<PB3); |
19 | DDRC &= ~(1<<PC0) | (1<<PC1) | (1<<PC2) | (1<<PC3); // PORTC = Eingang |
20 | |
21 | if (!(PINC & (1<<PC0))) // 0% Modulation |
22 | {
|
23 | wert=0; |
24 | PWM_init(wert); |
25 | }
|
26 | if (!(PINC & (1<<PC1))) // 25% |
27 | {
|
28 | wert=341; |
29 | PWM_init(wert); |
30 | PORTB |=(1<<PB3); // LED setzen |
31 | }
|
32 | if (!(PINC & (1<<PC2))) // 50% |
33 | {
|
34 | wert=512; |
35 | PWM_init(wert); |
36 | PORTB |=(1<<PB4); // LED setzen |
37 | }
|
38 | if (!(PINC & (1<<PC3))) // 100% |
39 | {
|
40 | wert=1023; |
41 | PWM_init(wert); |
42 | }
|
43 | |
44 | |
45 | // -------------- falls keinen Taster gedrückt ---------------------------
|
46 | |
47 | PORTB |=(1<<PB5); // LED setzen |
48 | _delay_ms(25); // Warte |
49 | PORTB &= ~(1<<PB5); // LED löschen |
50 | _delay_ms(25); // Warte |
51 | }
|
52 | return 0; |
53 | }
|
und der Code der PWM_init().
1 | #define F_CPU 8000000UL // 8 MHz
|
2 | |
3 | #include <stdio.h> |
4 | #include <avr/io.h> |
5 | #include <util/delay.h> |
6 | #include <avr/interrupt.h> |
7 | |
8 | |
9 | void PWM_init(int vergleichswert) |
10 | {
|
11 | DDRB = (1 << PB1); // PORTB als Ausgang |
12 | ICR1 =(uint16_t)250; |
13 | OCR1A = vergleichswert; // Vergleichswert aus Main |
14 | |
15 | //sei();
|
16 | TCCR1A = (1<<COM1A1) | (1 << WGM11) | (1 << WGM10); // non-inverting mode fuer Pin OC1A und Fast PWM Mode 10Bit |
17 | TCCR1B = (1 << WGM13) | (1 << WGM12) | (1<<CS11); // Fast PWM Mode und Prescaler: 1/8 |
18 | |
19 | |
20 | //return vergleichswert;
|
21 | }
|
Du benutzt Timer-Mode 15, dabei legt OCR1A den Top-Wert fest, nicht den Vergleichswert. Aber du setzt auch ICR1, wolltest du also eigentlich Mode 14 haben? Aber wenn ja, welchen Sinn macht es dann, den Vergleichswert größer zu machen, als den Top-Wert?
...jetzt mal vorerst eine Verständnisfrage. In welchem Register ( TCCR1A oder TCCR1B ) wird der Modus eingestellt und wie verwendet man genau die verschiedenen Modi. Ausserdem gibt es Für beide Register WGM-Einstellungen? Aus dem Datenblatt (Seite 127) kann ich zwar den Top-Wert lesen, aber ich bin mir nicht immer sicher welchen man für was verwendet. Z.B. Fast PWM ist auf 10 Modi aufgeteilt!! Vielen Dank
>In welchem Register ( TCCR1A oder TCCR1B ) wird der Modus eingestellt >Ausserdem gibt es Für beide Register WGM-Einstellungen? Eben. Der Modus wird mit daher in beiden Register eingestellt, durch setzten aller WGM-Bits auf den gewünschten Wert. >Aus dem Datenblatt (Seite 127) kann ich zwar den Top-Wert lesen, aber >ich bin mir nicht immer sicher welchen man für was verwendet. Das steht in der Beschreibung zu den einzelnen Modi. Wenn es zu einem Mosdus mehrere Variante gibt, unterschieden die sich dann entweder durch die verwendeten Register (z.B. enthält mal OCRx den Wert für TOP, mal ICRx), oder durch verschieden, fest vorgegeben TOP-Werte. Bei Fast-PWM z.B. 0x00FF, 0x01FF, usw. Oliver
Nachtrag: >Aus dem Datenblatt (Seite 127) >... >Z.B. Fast PWM ist auf 10 Modi aufgeteilt!! Eigentlich hat der Timer nur vier Betriebsarten: Normal, CTC, Fast PWM und Phase Correct PWM. Welche dieser Varianten jetzt für deine Aufgabenstellung die richtige ist, musst du selbst entscheiden. Das Datenblatt, welches ich vom Mega48 habe, zeigt auf Seite 131 in Tabelle 13-4 genau fünf Fast-PWM-Varianten. FAST-PWM-8bit, -9-bit, und -10-bit, mit festen TOP Werten, sowie jeweils eine mit einstellbarem TOP-Wert in ICR1 bzw. OCR1A. Dazu kommen dann noch die COM1Ax und COM1Bx-Bits in TCCR1A, über die du einstellen kannst, wann und wie die Pins OCR1A und OCR1B jeweils ihren Zustand ändern. Ähnlich ist es bei den anderen Timer-Betriebsarten. Oliver
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.