Hey, Ich hab micht mit der ansteuerung eines Schrittmotors beschäftigt. Und ein ganz einfaches Programm geschrieben-- aber er dreht sich einfach nicht. Könnt ihr mir bitte helfen. Danke im Vorraus.
Kay L. schrieb: > Hey, > > Ich hab micht mit der ansteuerung eines Schrittmotors beschäftigt. Und > ein ganz einfaches Programm geschrieben-- aber er dreht sich einfach > nicht. > Könnt ihr mir bitte helfen. > Danke im Vorraus. Als Erstes solltest Du uns mitteilen, welche Leitungen Du wo angeschlossen hast und was für ein Schrittmotor das ist - wir haben keine Glaskugel :-) Ein Fehler ist schonmal, dass Du das Datenrichtungsregister (DDRD) mit den Werten des Arrays beschreibst. Das sollte aber wohl eher PORTD, also das Ausgangsregister, sein. Außerdem enthält Dein Array nur vier Werte, Du liest aber in jeder Schleife zehn Werte aus. Und: i kann als unsigned int nie kleiner als 0 werden, die zweite Schleife wird also nie beendet ... Näheres gibt es bei mehr Infos :-) Chris D.
Hey, Stimmt sorry, im Anhang liegen noch die Daten vom Schrittmotor vom QMOT Motor QSH2818 Port D 2 schwarz Port D 3 grün Port D 4 rot Port D 5 blau Wie könnt ich die denn verändern das sie beendet wird?? MFG
Angehängte Dateien:
-
 Anschlussplan.JPG
(28 KB)
Anschlussplan.JPG
(28 KB)
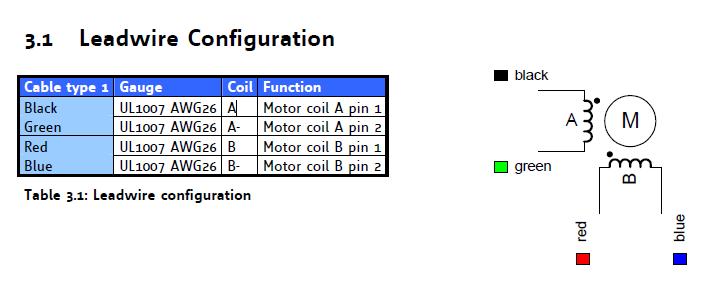
Kay L. schrieb: > Hey, > Stimmt sorry, im Anhang liegen noch die Daten vom Schrittmotor vom QMOT > Motor QSH2818 > > Port D 2 schwarz > Port D 3 grün > Port D 4 rot > Port D 5 blau Ok, also gehören PD2 und PD3 und PD4 und PD5 je zu einer Spule. Offensichtlich handelt es sich um einen bipolaren Motor. Du musst also die Spannungsrichtungen jeder Spule umschalten können. Laut Datenblatt arbeitet der Motor mit max. 0,7A - Du benötigst also einen Treiberbaustein, da der AVR das nicht packt; beispielsweise einen L298, L6219 etc. Im Vollschrittbetrieb (bei Deinem Motor also 1,8°-Schritte) werden immer beide Spulen bestromt und dann entsprechend nacheinander umgeschaltet: 1.Schritt: PD2=ein, PD3=aus, PD4=ein, PD5=aus 2.Schritt: PD2=aus, PD3=ein, PD4=ein, PD5=aus 3.Schritt: PD2=aus, PD3=ein, PD4=aus, PD5=ein 4.Schritt: PD2=ein, PD3=aus, PD4=aus, PD5=ein Dual sieht das für Deinen Port D also so aus: 1.Schritt: 0b00010100 = 0x14 2.Schritt: 0b00011000 = 0x18 3.Schritt: 0b00101000 = 0x28 4.Schritt: 0b00100100 = 0x24 Ich nehme mal an, dass Du an PA0 einen Taster hängen hast, der die Drehrichtung ändern soll. Im Prinzip ist es schon ok, das Array einmal von links nach rechts und dann von rechts nach links zu durchlaufen. Ich würde aber einfach i auf Unterlauf abfragen:
1 | |
2 | |
3 | |
4 | |
5 | |
6 | |
7 | |
8 | |
9 | |
10 | |
11 | |
12 | |
13 | |
14 | |
15 | |
16 | |
17 | |
18 | |
19 | |
20 | |
21 | |
22 | |
23 | |
24 | |
25 | |
26 | |
27 | |
28 | |
29 | |
30 | |
31 | |
32 | |
33 | |
34 | |
35 | |
36 | |
37 | |
38 | |
39 | |
40 | |
41 | |
42 | |
43 | |
44 | |
45 | |
Ich hoffe, ich hab nix vergessen - ist einfach so runtergeschrieben ;-) Chris D.
Hey du, ich hab das Programm abgeschrieben, aber es tut nicht--langsam bin ich am verzweifeln. Ich hab den L298 als Treiberbaustein auf einer Externen Platine gelötet. Anbei häng ihr dir den Schaltplan von meiner Platine. Ich habe alles durch gemessen Ein und Ausgänge sollten gehn. MFG kay
Kay L. schrieb: > Hey du, Redet man sich bei Euch so an? Hier sagt man "Hallo Kay" > ich hab das Programm abgeschrieben, aber es tut nicht--langsam bin ich > am verzweifeln. > > Ich hab den L298 als Treiberbaustein auf einer Externen Platine gelötet. > Anbei häng ihr dir den Schaltplan von meiner Platine. Ich habe alles > durch gemessen Ein und Ausgänge sollten gehn. Natürlich kann das so auch nicht funktionieren, weil Du nicht erwähnt hattest, dass PD0 und PD1 die Enable-Eingänge für den L298 sind und dementsprechend gesetzt (=1) sein müssen, damit der Motor überhaupt irgendetwas macht. Bit 0 und Bit 1 von PORTD müssen also immer gesetzt sein, wenn der Motor sich bewegen soll. Die Array-Werte musst Du dementsprechend anpassen. Chris D.
Hallo Chris,
reicht das denn wenn ich einfach bevor ich den Motoransteuerung
schreibe:
PORTD |= (1<<PD0);
PORTD |= (1<<PD1);?
MFG Kay
Nein, denn Du überschreibst die beiden gesetzten Bits ja durch die Bytes aus dem Array. Du musst die Bits 0 und 1 doch einfach nur im Array in jedem Byte setzen - fertig. Chris
Habe ich gemacht und die Hex-zahlen umgeschrieben --aber es tut trotzdem nichts Gruß Kay
Gast
#1295513
>// Warteschleife >// (nicht schön - so etwas macht man besser mit _delay_us etc.) >void warten (void) >{ > unsigned long p; > for (p=0; p<0x1fff; p++); >} Das ist nicht nur unschön, es wird auch nicht funktionieren, der Optimizer schmeisst die ganze Warteschlaufe raus, weil sie aus Optimizersicht nichts bewirkt! Der Schrittmotor wird mit Sicherheit viel zu schnell getaktet und kommt gar nicht zum drehen... Wenn es schon sein muss, das Zauberwort heisst "volatile" void warten (void) { volatile unsigned long p; for (p=0; p<0x1fff; p++); } Oder wie Du selber im Kommentar vorschlägst, verwende doch besser mal die _delay_us() oder _delay_ms() Funktion! => _delay_ms(2) // 500Hz Schrittfrequenz ist für den Anfang sicher ok
Dann würde ich zuallererst einmal die Leitungen "durchklingeln", also
ein kleines Programm schreiben, dass die Ausgänge PD0-PD7 setzt, z.B. so
unsigned char by;
while (1)
{
PORTD = by;
by++;
}
und dann mal mit dem Oszilloskop gucken, ob die entsprechenden Eingänge
des L298 auch wirklich angesteuert werden.
Wenn kein Oszi vorhanden, dann eine Warteschleife einbauen und per
Leuchtdiode messen.
Ansonsten sehe ich keinen Fehler.
Chris D.
@Peter: Recht haste - ich mache das immer ganz sauber über
Timerinterrupts, dann stimmen die verzögerungen auch halbwegs :-)
Moin (Das sagt man bei uns, den ganzen Tag und auch die Nacht ;) ) Also zum Thema, bei solchen Problem nehme ich immer ein paar LED´s und gucke mal ob überhaupt was aus dem AVR rauskommt. Besonders gern laß ich nen Timer (wenn frei) einfach laufen und toggle in einer Interruptroutine einen Pin. Da kommt auch eine LED dran und schon weiß man, dass der µC prinzipiell läuft. Weiter ist so recht sicher, dass das Programm fehlerfrei auf dem AVR gelandet ist. Evtl. ist das alles selbstverständlich, evtl aber auch nicht ;) Vielleicht hilft es ja Grüße aus Hamburg
Hab das Programm geändert und eine LED angeschlossen am Ausgang passiert nichts, aber wenn ich direkt an das ATmeaga 128 Board klemme blinkt die LED.Aber auch nur am PIN 0-3. Ich denke das der Motortreiber defekt ist. Oder habt ihr noch ne andere Idee?
Antwort schreiben
Bitte melde dich an, um einen Beitrag zu schreiben.