Hallo, ich war auf der Suche nach einem billigen Variometer zum Gleitschirmfliegen. Bei den gängigen Anbietern fallen mir als armem Student allerdings doch echt die Löcher aus dem Käse. Das billigste mit Display kostet beispielsweise bei Bräuniger stattliche 229€ Da fragte ich mich, ob ich mir sowas nicht einfach selbstbauen kann. Weiss jemand, welche Drucksensoren dafür genau genug wären? Die Steig und Sinkraten sollten halt recht zeitig erfasst werden. Ein Wertebereich von + bis - 10 m/s sollte fürs Erste dicke ausreichen. Eine Hand voll Atmegas hab ich noch hier rumfliegen. Damit müsste da doch was Aufzubauen sein. Ich hab nur keine Ahnung was fürn Drucksensor ich da nehm. Und später halt, wie ich das dann programmiere. Ich konnte mir durch googeln nirgendwo einen Schaltplan zum Selbstbau beschaffen, daher dachte ich vielleicht kann mir ja jemand zur Seite stehen, ein Vario selbst zu bauen. Die ganzen Funktionen wie Speedsensoranschluss oder Barograph und Loggingfunktion sind für mich momentan noch recht unnütz. Ich möchte nur ein Instrument mit ner Anzeige, dass mir sagt, wie meine Sinkrate oder Steigrate ist. einetwegen kann die Anzeige auch lediglich durch ein Akustiksignal erfolgen. Bedanke mich shconmal im Voraus für hilfreiche Tipps Grüße aus saarbrücken Jochen
Selbstbau? Wäre mir zu gewagt. Es geht um verläßliche, reproduzierbare Werte.
Wo siehst du das Wagnis? Es soll ja nur als Low Budgetlösung dienen. Das ich da evtl kleinere Abweichungen drin hab macht ja nix. Ich richte mich ja nicht nach der Elektronik, sondern das Ding soll nur ein wenig Mehrkomfort bringen Gruß Jochen
Ein Wagnis ist es nicht. Aber fuer 229 Euro schafft man so eine Entwicklung nicht. Und dann noch in einem vernuenftigen Gehaeuse.
http://www.pixelproc.net/varios.html http://www.sparkfun.com/commerce/product_info.php?products_id=8161 siehe Documents
Stichworte: AVR Drucksensor ADC der Drucksensor liefert in Abhängigkeit des Drucks eine Spannung. Diese muss eventuell noch mit einem OPamp verstärkt werden. Der ADC liesst diese Spannung und rechnet diese laut Datenblatt in die Höhe um. Ein Lcd gibt diese auf einem LCD aus. Ein Logger auf SDcard (+Temperatur+GPS) sollte dann auch noch drinn sein. geschätze Gesamtkosten: <50€ je nach Drucksensor (Ebay). Entsprechende Projekte gibts ja genuegend im Forum.
Nicht Altimeter, Variometer. Da will man die Drueckaenderung messen koennen. Um die geforderten 10cm/s aufloesen zu koennen muss das Design mindestens 16Bit haben.
Jochen schreibt:Ein Wertebereich von + bis - 10 m/s sollte fürs Erste dicke ausreichen.
Ja. Das ist der gesammte Bereich. Passt. Bei mehr ist eh Panik angesagt. Aber die Aufloesung muss trotzdem besser als 10cm/s sein. Sonst ist es nicht brauchbar. Ich flieg selber. Bei +10cm/s will man ein Piep ... piep haben. Und das darf dann nicht Rauschen sein.
http://ludens.cl/Electron/Vario/vario.html http://www.rocznik.de/Marko/electronic/project/vario/vario_engll.htm http://topaflyers.com/kites/index.html http://electronicdesign.com/Articles/ArticleID/6241/6241.html http://www.avrfreaks.net/index.php?name=PNphpBB2&file=printview&t=35007&start=0 https://www.mikrocontroller.com/index.php?main_page=product_info&cPath=74&products_id=197
@ ?? Hast du dir mal den ersten der Links von Stefan B. angesehn, meinst du das kann man nachbauen und taugt dann? Den Sensor der dort verwendet wird find ich zwar nicht aber vllt. weisst du ja dann nen Ersatz. @ Stefan B. danke für die Links. Der erste sieht schonmal vielversprechend aus. Gruß Jochen
In dem ersten Artikel wird als Ersatz ein Motorola (heute Freescale) MPX 4100 vorgeschlagen. Den - soweit ich sehe moderneren, aber kompatiblen - MPX 4115 kann man in DE kaufen, siehe letzter Link zum Mikrocopter-Shop. Auf was ?? hinweist, hat mit dem AD-Wandler zu tun. Die 0-5V müssen seiner Ansicht nach (ich habe es nicht nachgerechnet) mit 16-Bit digitalisiert werden, um die geforderte Höhenabstufung von +- 10cm/s auf dem µC registrieren zu können. Das würde einen besonderen AD-Wandler IC oder einen µC mit einem integrierten 16-Bit ADC Eingang voraussetzen. Beim Mikrokopter wird kein 16-Bit ADC verwendet, sondern der "stinknormale" 10-Bit ADC eines Atmega644 (http://www.mikrokopter.de/ucwiki/FlightCtrl?action=AttachFile&do=get&target=FlightCtrl_V1_1_Schaltplan.gif). Der Trick ist wahrscheinlich die Offsetkorrektur / Bereichsspreizung mit einem Rail-to-Rail Operationsverstärker (TS914).
Schau mal auf http://www.mikrokopter.de/ucwiki/H%C3%B6hensensor, da wird von einer theoretischen (elektrischen) Auflösung von 5.26 cm gesprochen. In dem Video auf deren Startseite wird (gegen Ende des Videos) die Funktion demonstriert und sie tuts ganz gut... allerdings hat der Mikrokopter ja auch noch seine Accelerometer, also läßt sich daraus schlecht auf die Genauigkeit des Luftdrucksensors schließen.
Ich danke euch allen, ihr habt mir sehr weitergeholfen mit den Links. Ich geh morgen mal noch zum Typ aus meinem Elektroniklabor und klär das und dann bau ich sowas. Wenn ich den Kleinkram wie Elkos und Gerödel vernachlässige komm ich auf maximal 50€ Baupreis Das wär super. Gruß und danke Jochen
hast du dann vielleicht lust eine dt anleitung anzulegen, damit waere sicher vielen geholfen ;-)
Bei mehr als 1g hast Du Dich ganz gründlich verflogen, falscher Planet... Bosch hat einen Barometrischen Drucksensor, der besser als 10cm Höhenunterschied auflöst und die gesamte Auswertungselektronik im Chip hat, angesprochen wird der dann per IIC.
> Bei mehr als 1g hast Du Dich ganz gründlich verflogen, falscher > Planet... :-))
Guido Körber schrieb: > Bei mehr als 1g hast Du Dich ganz gründlich verflogen, falscher > Planet... > > Bosch hat einen Barometrischen Drucksensor, der besser als 10cm > Höhenunterschied auflöst und die gesamte Auswertungselektronik im Chip > hat, angesprochen wird der dann per IIC. Was kostet der bzw. ein Link? Welche Auflösung erreichen eigentlich die Module von hoperf? Gruß - Abdul
Sali bei den Bräuniger und Flytec Geräten sind Sensoren der Firma INTERSEMA verbaut (Bsp: MS5534C). Diese haben ein I2C Interface mit dem die Druckdaten als 16Bit Werte ausgelesen werden. Als Alternative gibt's die SCP1000 von VTI entweder mit SPI oder I2C Interface. Vorteile/Nachteile: - Beide benötigen ein 3V Singlesupply - INTERSEMA Sensoren haben eine Refreshrate bis zu 33Hz, der SCP maximal 9Hz (2Hz bei 16Bit) - Der SCP-1000 ist über den ganzen Messbereich kalibriert, INTERSEMA gibt Kalibrationswerte mit die Kalibration muss aber zwingend im uC erfolgen. Für den Bau eines Variometer würde ich einen INTERSEMA benutzen, die Anzahl Messwerte werden dir beim SCP wahrscheinlich kaum ausreichen um "schnelle" Änderungen zu registrieren und Rauschen zu filtern. Gruess und Happy Landing kubes
gabs bei elektor vor 3-4 jahren nen super eigenbau auf uc basis für segelflieger........
Angehängte Dateien:
-

gofly1.gif
27 KB
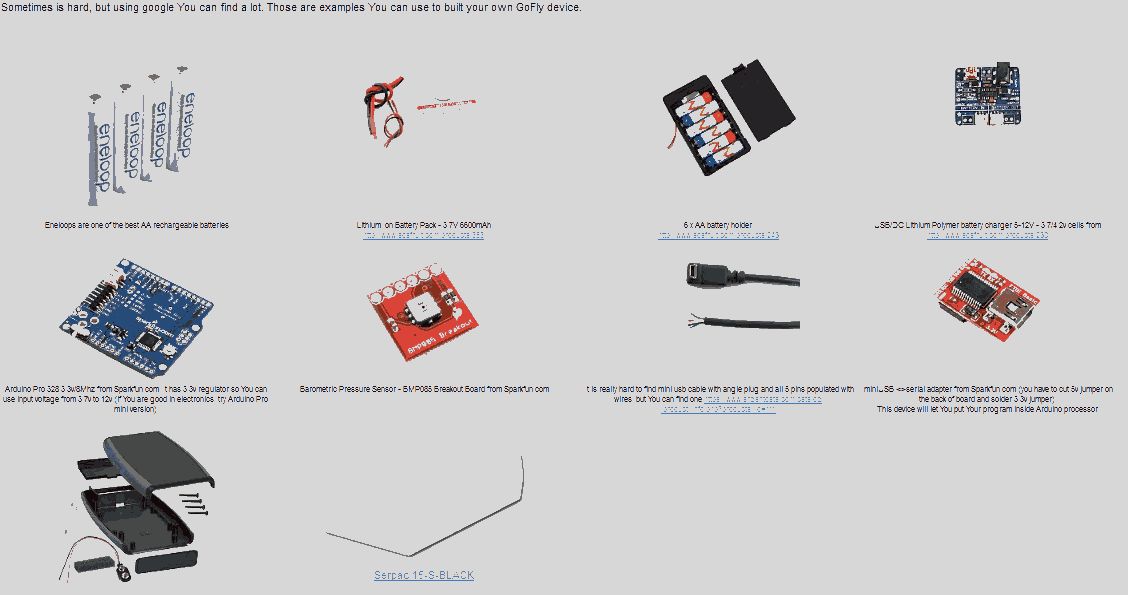
Ich liebe es alte verstaubte Threads auszugraben, besonders wenn es sich lohnt für ein Update zu sorgen. Jaro hat hier eine klasse Lösung gefunden. Die Kosten belaufen sich auf kleines Geld und jeder der sich's zutraut kann das bauen: http://sites.google.com/site/jarosrwebsite/para-nav Das ganze basiert auf einem preiswerten Autonavi in Kombination mit einem Arduino Board und einem Drucksensor.
Angehängte Dateien:
-

GoFly-Features.png
390 KB

{kind=link}
{kind=link}
Oh ja, wem es nicht klar ist: Die Lösung kommt mit einem GPS daher, da ja ein Mio Moov PNA verwendet wird und bietet den Luxus in Verbindung mit LK8000 (Freeware Projekt) Lufträume in der Seiten- und Draufsicht bei Annäherung darzustellen. Darüberhinaus werden von FAI anerkannte IGC-Files generiert - Das bieten normalerweise nicht mal Flytec Bräuninger Leonardo Skytraxx Aircotec und wie sie alle heißen mögen zu diesem Preis. Eine absolute de luxe Lösung für kleines Geld. http://www.youtube.com/watch?feature=player_embedded&v=JbgwO6_1T8E Why? - you can build this for about 150$ -really nice flying computer, with lot of features, -builtin variometer, -built in data logger approved by FAI -with color screen, TOPO maps and airspace maps -easily support competition tasks -your PNA is still very good car navigation system, so it will be peace of cake to come back from XC flying, If You have to parawait, there is plenty of other apps, games that You can find on the Internet for PNA.
Einer geht noch ;) http://www.gleitschirmdrachenforum.de/showthread.php?3689-Vario-Solario-Eigenbau/page2 Bevor Ihr Euch hier in den Details der Programmierung verliert: Ein Pieper kann mit wenig Aufwand auch ganz ohne Mikroprozessor und ohne AD-Wandlung realisiert werden. Der Drucksensor liefert eine Analogspannung, die Verstärkt wird. Davon lässt sich mit zwei Timer-Bausteinen der übliche Piepton mit ansteigender Piepfrequenz und parallel ansteigendem Piep-Takt umwandeln. Komparatorschaltungen erzeugen ab einer gwissen mit Trimmer einstellbaren Schwelle ein Signal, dass den Pieper entweder ganz abschaltet, oder den Pieptakt unterdrückt. Auf diese Weise bleibt das Vario beim Nullschieber still und gibt ein Dauertröten beim Saufen. Eine Temperatiurkompensation, wie weiter oben angesprochen, halte ich für überflüssig. Es soll ja kein Höhenmesser betrieben werden, sondern nur die Änderungen in ein Schallsignal ohne absolute Kalibrierung verwandelt werden. Ob da irgendwelche Offsetspannungen driften, oder nicht, fällt nicht weiter auf. Für die Verstärkung und Signalmassage gibt es reichlich Opamps zur Auswahl mit wenig Stromverbrauch und der Möglichkeit mit +5V Versorgung auszukommen. Als Timer-Baustein sollte der Klassiker NE555 das Mittel der Wahl sein. Für den eigentlichen Piep wäre Digisound F/WDP möglich, oder man geht mit dem Signal auf einen im Helm montierten Kopfhöhrer. Statt dem oben angesprochenen Sensor würde ich mir den MPX5010 anschauen. ( Datenblatt MPX5010 ) Der weist eine zehnfach höhere Sensitivität auf (450 mV/kPa statt 54 mV/kPa). Das erleichtert die an den Sensor anschließende Verstärkung. Conrad ist übrigens eine Apotheke. Bei Farnell und Digikey kosten die Sensoren zwischen 7 und 10 EUR in Einzelstückzahlen. Insgesamt scheint mir das ein nettes Bastelprojekt, das sich bei den Nischenpreisen, zu denen Varios gehandelt werden, sogar geldmäßig rechnen könnte. Arbeitszeit darf man dabei natürlich nicht rechnen. ---<(kaimartin)>--- PS: Die Lösung mit dem digitalen Sensor ist natürlich moderner und eleganter im Sinne von weniger ICs.
Als armer Student sollte man gar nicht erstmit Gleitschirmfliegen beginnen. speziell wenn ein Vario fuer 200 Euro schon ein Problem darstellen. Mach erst mal eine Baumlandung im unzugaenglichen Gebiet, sodass ein Heli kommen muss. Da fallen dann ganz andere Kosten an...
Halb Oschi schrieb: > Als armer Student sollte man gar nicht erstmit Gleitschirmfliegen > beginnen. speziell wenn ein Vario fuer 200 Euro schon ein Problem > darstellen. Mach erst mal eine Baumlandung im unzugaenglichen Gebiet, > sodass ein Heli kommen muss. Da fallen dann ganz andere Kosten an... Dafür hat man i.d. Regel eine Versicherung (DHV oder andere), wie ich auch. Da fallen also überhaupt keine Kosten an! Außerdem ist es doch recht wenig hilfreich, wenn man damit argumentiert, dass da sowiso irgendwann was passiert (Baumlandung, Unfall etc.). Dann kann ich mich gleich daheim einsperren! @ Jochen Ich vermute mal, dass du im Besitz der A-Lizenz bist und somit eh auf keine Strecken darfst, sondern nur im Gleitwinkelbereich des Fluggebiets fliegen darfst. Wenn du eine Minimallösung suchst, nimm ein Bräuniger Alto Vario II (http://www.ebay.de/itm/Brauniger-Alto-Vario-PII-/180876529132?pt=LH_DefaultDomain_77&hash=item2a1d14cdec), das reicht für den Anfang völlig aus und du hast ein fertiges Gerät mit vernünftigem Gehäuse. Ich selber fliege ein IQ Classic mit Analysefunktionen der letzten 20 Flüge usw. Wenn ich ehrlich bin, brauch ich das Vario fast nie, außer die Situation wird kritisch (absaufen), denn ich merke relevante Höhenänderungen an der A***backe :) Auch das zentrieren der Thermik mache ich ohne Vario (Vario ist aus). Das Vario oben im Link dürfte preislich niedrig bleiben, da viele auf die großen Bräuniger gehen, die aber die meisten gar nicht bräuchten ;) Gruß Stefan
>Dafür hat man i.d. Regel eine Versicherung (DHV oder andere), wie ich
auch. Da fallen also überhaupt keine Kosten an!
Schoen, wenn der DHV das bezahlt. Fuer die paar Kroeten die man da
abdrueckt. Hier in der Schweiz bezahlt die Versicherung des nationalen
Verbandes nur fuer Schaeden gegenueber Dritten (Haftpflicht), zB wenn
ich in ein Auto fliege. Eine Baumlandung hingegen ist natuerlich nicht
gedeckt(Kasko). Da fallen dann bis 2k Euro an.
Also bitte nachpruefen.
Halb Oschi schrieb: >>Dafür hat man i.d. Regel eine Versicherung (DHV oder andere), wie ich > auch. Da fallen also überhaupt keine Kosten an! > > > Schoen, wenn der DHV das bezahlt. Fuer die paar Kroeten die man da > abdrueckt. Hier in der Schweiz bezahlt die Versicherung des nationalen > Verbandes nur fuer Schaeden gegenueber Dritten (Haftpflicht), zB wenn > ich in ein Auto fliege. Eine Baumlandung hingegen ist natuerlich nicht > gedeckt(Kasko). Da fallen dann bis 2k Euro an. > Also bitte nachpruefen. Der Mann hat sein Studium vermutlich schon abgeschlossen...
Sagt mal, liebe Gleitschirmflieger: Eure Varios, die sind doch höchstens elektronisch kompensiert, oder sogar gänzlich unkompensiert? Oder fliegt ihr mit TEK-Varios?
> oder sogar gänzlich unkompensiert
Ein Absolutdrucksensor ohne Temperaturkompensation ist für
Höhenmessungen vollkomen ungeeignet. Ein Variometersignal könnte man
jedoch gewinnen.
Um nicht aus Versehen in kontrollierten Luftraum einzufliegen sollte
jeder, der auf Strecke geht, einen zuverlässigen Höhenmesser mitführen.
Ein unkompensierter Sensor hätte z.B. 3% Drift über einen definierten
Temperaturbereich und ein kompensierter <0,5%.
In einer guten Thermik wird es pro Kreis ca. 1 Grad kälter. 2000m
Höhengewinn entspricht -15°C. Das Gerät ist dem Fahrtwind ausgesetzt.
Der Unterschied wäre ganz grob ein Fehler von 250m gegenüber 30m.
Mir geht es nicht um Temperaturkompensation... Mir schwant, dass (manche, viele?) Gleitschirmflieger den Unterschied zwischen einem unkompensiertem und einem kompensiertem Vario (TEK = Total-Energie-Kompensiert) nicht kennen...
STK500-Besitzer schrieb: > Der Mann hat sein Studium vermutlich schon abgeschlossen... Hmm, irgendwie achte ich auch nie auf das Erstelldatum der Threads ;) @Interssierter Mein Vario ist ja nicht mehr ganz akutell, hat also keine TEK-Kompensation wie z.b. das IQ Competition/GPS von Bräuniger. Ich müsste jetzt auch gerade nachschauen, ob und wie eine Kompensation bei mir im Gerät gemacht wird. Beim GS fliegen sitze ich ja im Freien und ich kann die Signale des Varios ohne geräteinterne Kompensation direkt abschätzen. Beschleunige ich, bremse den Schirm dann wieder leicht aus und gewinne in diesem Moment wieder Höhe, ist das natürlich kein thermisches Steigen, sondern einfach die Überfahrt, die wieder umgesetzt wird. Bleibt die Geschwindigkeit in etwa gleich und ich hab ein stetiges Signal vom Vario, ist das eine relative Höhenänderung. Beim Segelfliegen hab ich ja keinen "Wind im Gesicht" und kann somit auch kleine Geschwindigkeitsänderung nicht am Körper wahrnehmen. Daher sind dort TEK-Düsen sinnvoll, dass das Vario keine "Knüppelthermik" anzeigt. Beim GS halte ich das allerdings als "nice to have". Die Meisten, die ich kenne, fliegen hauptsächlich nach Gefühl in den Fingern und im Hintern. Varios sind beim kritischen Situationen, wenn ich das Gelände noch nicht kenne oder in Wettkämpfen sinnvoll, ansonsten wohl eher ein Spielzeug :) Gruß Stefan
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.