Hallo zusammen, ich möchte einen Induktivgeber auswerten. (0,3 ... 120V / 0 ... 10KHz) Genauer : Den Nulldurchgang. Die Auswertung soll ein ATMega übernehmen. Habe mich noch nicht festgelegt, wird wahrscheinlich ein ATMega32. Ich muss also einen "Impulsformer" entwickeln : - Spannung des Signal begrenzen. CutOff bei wenigen Volt. Da müsste doch ein Tiefpass mit anschliessender Z-Diode reichen ? Eine Halbwelle abschneiden. - Verstärkung einer Halbwelle mit einem Operationsverstärker. So dimensioniert das die 0.3V den OP in die Begrenzung treiben. Mit dem Ausgang vom OP auf den INT0 des ATMega und den Interrupt auf die Flanke triggern. Könnte das Funktionieren ? Bzw liegen die Nachteile ?
Hallo, anstelle mit einem OP-Amp in die Begrenzung zu gehen würde ich eher einen Komparator mit Hysterese und ggf. ein digitales Glitch-Filter verwenden. Profi-Schaltungen verwenden anpaßbare Parameter für Empfindlichkeit sowie Schaltpunkte. http://www.semiconductors.bosch.de/pdf/CY30_Product_Info.pdf
@"Wie heißt du eigentlich?" >ich möchte einen Induktivgeber auswerten. >(0,3 ... 120V / 0 ... 10KHz) >Genauer : Den Nulldurchgang. Warum den Nulldurchgang? Kann das Signal wirklich zwischen 0,3V und 120V schwanken? Ist das der Spitzenwert? Von was für einem Signal? Wie soll die Elektronik erkennen, daß die 0,3V das eine Mal das Nutzsignal ist, das andere Mal ein unerwünschter Spike? Induktivgeber benötigen oft eine definierte Last (Integrationskondensator), um zu verhindern, daß die Elektronik zu sensibel auf Störspikes reagiert, die von schnellen Transienten herrühren. Kai Klaas
@Kai Klaas Die Spannungen sind Uspitze. (0,3V sind das minimalste was ich messen will) Es geht um ein Triggerrad an der Kurbelwelle. Zugegeben die 10KHz sind da ein bisschen viel... Da die Drehzahl ein aber einen Wert von ca 2/s - 130/s haben wir einen hohen Variationsbereich. Wenn ich mich richtig erinnere ist doch die Quellspannung proportional zu B und der Winkelgeschwindigkeit ??? Jedenfalls kommt das mit den Min und Max Werten gut hin. (Man brauchst ja auch immer ein wenig Reserve) Ich könnte nun auch die Spannung messen. Aber wenn sich was am Geber ändert, Luftspalt, anderes Rad ... Mag. vorspannung. Muss ich jedes mal neu kalibrieren oder ? Um den Scheitel bestimmen zu können, muss ich das Signal sehr oft abtasten, dabei bekomme ich meinen Trigger auch nur "nachträglich" wenn die Spannung schon wieder fällt ausgelöst. (Denn ich weiss nicht wie hoch das aktuelle Maximum liegt.) Das sicherste stellt für mich immer noch der Nullpunkt dar. Der ist Fix, schwimmt nicht kennt keine "Toleranz" und keinen drift. (Theroretisch) >die Elektronik erkennen, daß die 0,3V das eine Mal das Nutzsignal ist, >das andere Mal ein unerwünschter Spike? ^--- Destewegen bin ich scharf drauf den Nulldurchgang zu detektieren. Dabei muss ich im Prinzip nur ein Timeout bedenken wenn das Rad still steht. @ Anja Du bist mir schon öfter mit deinen guten Beiträgen aufgefallen :) Der Bosch IC wäre natürlich ganz genau mein Ding. Aber ohne Bezugsquelle... Soweit ich weiss gibt es da einen bekannten Pedant LMxxx. Gibts aber beide nicht bei Reichelt ;) Megasquirt scheint da was ähnliches zu machen wie ich es vorhabe. Vielleicht sollte ich bei denen einfach "abkupfern" http://www.microsquirt.info/schm4.gif Aber im Prinzip müsste doch schon ein einfacher Transistor reichen !? Sperrt die Negative Halbwelle und öffnet bei entsprechendem Arbeitspunkt schon bei recht wenig Spannung/früh bei der Pos. Halbwelle. Eine andere Idee wäre das ganze per Flipflop mit der NegativenHalbwelle "scharf" zu schalten, um ein bisschen mehr "Sicherheit" zu bekommen. Natürlich muss das Signal im µC dann immer noch auf Plausibelität geprüft werden. Ich denke ich baue das ganze mit einem Komparator auf Lochraster auf. Gibt es dafür vielleicht noch bessere "Standard" Schaltungen ??? Vielen dank schonmal für die Anregungen.
>Das sicherste stellt für mich immer noch der Nullpunkt dar. >Der ist Fix, schwimmt nicht kennt keine "Toleranz" und keinen drift. Aber nicht einmal die Profis detektieren den Nulldurchgang, sondern vielmehr eine Mindestimpulshöhe. Vorher wird noch kräftig integriert: http://www.datasheetarchive.com/pdf-datasheets/Datasheets-12/DSA-221503.pdf Kai Klaas
> Soweit ich weiss gibt es da einen bekannten Pedant LMxxx.
Kannst du auch die genaue Bezeichnung angeben oder ist das ein
Geheimnis?
Hi, es ist der LM1850. Ist allerdings nicht mehr wirklich auf der Höhe der Zeit. Das Konzept der variablen Hysterese sieht auf den ersten Blick ganz sinnvoll aus,m hat allerdings im realen Fahrzeug einige unangenehme Nebeneffekte, wie z.B. im Falle von Stall-Conditions (hier gibt es dann meist den gefürchteten SyncLoss). Falls ich es richtig sehe möchtes Du wohl eine z.B. 60-2 Triggerscheibe auswerten, oder ? Also wenn Du nur die Drehzahl wissen willst, dann ist die Detektion des Nulldurchgangs nicht so wichtig, wenn allerdings eine genaue Winkellage der Kurbelwelle (wie bei Motorsteuergeräten) benötigt wird, dann ist der Nulldrchgang zwingend erforderlich (variable Flankensteilheit des Signals in Abhängigkeit der Drehzahl -> drehzahlabhängiger Winkelverzug). Hier gibt es dann zwei Möglichkeiten: - Induktivgeber mit Hilfsspannung auf z.B. 2,5V legen und denn mit "normalen" Schaltungskonzepten, wie z.B. Komparator ... und definierter Hysterese auswerten. - Induktivgeber mit Massebezug auswerten. Funktioniert auch sehr gut, bedarf allerdings sorgfältiger Bauteilauswahl und einiger Schaltungstricks, da sich sonst der Nulldurchgang nur schwer detektieren lässt. Wichtig bei der ganzen Sache ist in jedem Fall noch die defnierte Last für den konkreten Induktivgeber, das sonst zu Fehlmessungen bei bestimmen Frequenzen und im Bereich der Lücke kommt ... Gruss
@Tom >...wenn allerdings eine genaue Winkellage der Kurbelwelle (wie bei >Motorsteuergeräten) benötigt wird, dann ist der Nulldrchgang zwingend >erforderlich (variable Flankensteilheit des Signals in Abhängigkeit der >Drehzahl -> drehzahlabhängiger Winkelverzug) Nicht unbedingt. Wenn die Drehzahl bekannt ist, kann ein Winkelfehler mit der Software herausgerechnet werden. Kai Klaas
@KaiKlaas: ja, natürlich kann man den Winkelfehler rausrechnen, aber falls Du z.B. entprechende winkelsynchrone Pulse generieren willst, gibt es immer eine Zeit zwischen Pulskonfiguration und -Auslösung, während derer man nicht korregieren kann aber durch Drehzahlschwankungen dann Fehler entstehen. Nulldurchgang ist z.B. bei Motorsteuergeräten zwingend erforderlich. @National sorry, geirrt meinte LM1815 ... Gruss
@Tom >aber falls Du z.B. entprechende winkelsynchrone Pulse generieren willst, >gibt es immer eine Zeit zwischen Pulskonfiguration und -Auslösung, >während derer man nicht korregieren kann Wieso? Verstehe ich nicht. >aber durch Drehzahlschwankungen dann Fehler entstehen. Die Änderungsgeschwindigkeit der Drehzahl eines Motors ist doch aufgrund seiner Trägheit sehr gering. >Nulldurchgang ist z.B. bei Motorsteuergeräten zwingend erforderlich. Also hier beispielsweise macht man es nicht: http://www.datasheetarchive.com/pdf-datasheets/Datasheets-12/DSA-221503.pdf Kai Klaas
Hallo, Ihr könnt einem Angst machen !!! ;) @ ... (Gast) Ich meinte den LM1815. http://www.national.com/mpf/LM/LM1815.html#Overview Es sollte kein Geheimnis sein. Ich denke schon ein paar Tage über das Problem nach, da kann man die Nummer schonmal vergessen. Alles was ich im Internet gefunden habe war entweder eine OP Schaltung oder die Beispielschaltung aus dem Datenblatt dieses IC. Letztendlich kann man ja nur ein "beliebig" kleines Fenster um 0V Signalspannung detektieren. Der Nulldurchgang dürfte bei drehendem Triggerrad unendlich kurz sein. Der zentralen Punkt : Fehlerabschätzung. Mein Ziel ist ein halbes bis ein Grad Genauigkeit. Die 360°KW teilen sich jetzt auf in 60 Lands und 60 Pits. Alle 3°KW kommt also ein Nullpunkt (360/(2*60)). Daraus folgt bei einer sinusförmigen Spannung ein : - Minimalwert von ca 150mV. - Maximalwert von ca 60V. (Die 3°KW entsprechen einer Halbwelle Umin = Udach * sin(180/6) Je grösser nun die Spannung ist, um so genauer wird doch meine Detektion ? - Hochohmiges RC-Glied. - Impedanzwandler. - Komparator gegen die 150mV. - Ausgang auf int0 des AVR. Was könnte noch fehlen ? @ Kai Klaas >Aber nicht einmal die Profis detektieren den Nulldurchgang, sondern >vielmehr eine Mindestimpulshöhe. Vorher wird noch kräftig integriert: Ich verstehe nicht was da Integriert werden muß ? Welche Grösse über was ? Das von Dir zitierte Datenblatt zeigt bei "Signal shaping" doch lediglich für Neg. und Pos. Halbwelle den OP mit Hysterese (R17 / R20). Zum Integrieren müsste da doch noch ein Kondensator rein !?? Nachgeschaltet wurde ein FlipFlop wenn ich das richtig erkenne. Somit bekommt man ein tolles Rechtecksignal welches aktiv genullt wird. Die Funktion von C15+R15 / C16+R16 ist mit nicht klar. (Am VR Eingang direkt hinter dem Grätz) R18+C14 / R25+C17 bilden wohl einen Tiefpass ??? @ tom Ja es handelt sich um ein 60-2 Triggerrad. Siehe oben, +/- 0.5 °KW damit kann ich leben. Ich hoffe meine Schätzung ist schlüssig ? >wird, dann ist der Nulldurchgang zwingend erforderlich (variable >Flankensteilheit des Signals in Abhängigkeit der Drehzahl -> >drehzahlabhängiger Winkelverzug). alpha = asin (u / Udach) u = 0,150v konstanter Vergleichswert. Udach steigt von 0,3V -> 120V alpha bleibt bei mir < 0,5° >- Induktivgeber mit Hilfsspannung auf z.B. 2,5V legen und denn mit >"normalen" Schaltungskonzepten, wie z.B. Komparator ... und definierter >Hysterese auswerten. Wofür benötige ich die Hilfsspannung, wenn die für den OP zur verarbeitung der negativen Halbwelle dient -> warum nicht einfach abschneiden ? Vielleicht verstehe ich Deinen Vorschlag nicht ?! Sorry, OP Schaltung hatten wir in der FOX nicht mehr... >- Induktivgeber mit Massebezug auswerten. Funktioniert auch sehr gut, >bedarf allerdings sorgfältiger Bauteilauswahl und einiger >Schaltungstricks, da sich sonst der Nulldurchgang nur schwer detektieren >lässt. Das war eher meine Idee. Eine Seite des Komparator auf Uref = 150mV Die andere Seite bekommt eine Halbwelle des Signal. Verstehe da leider nicht warum getrickst werden muss... Könntest Du mir das erklären ? >Wichtig bei der ganzen Sache ist in jedem Fall noch die defnierte Last >für den konkreten Induktivgeber, das sonst zu Fehlmessungen bei >bestimmen Frequenzen und im Bereich der Lücke kommt ... Ich denke das sollte ich empirisch machen wenn die Versuchsschaltung aufgebaut ist. Nochmal zu eurer Nulldurchgangs Diskussion. Dieser Zeitpunkt ist doch klitze klitze klein ?! Quasi ein "mathematischer Punkt". Den kann man doch aufgrund seiner Eigenschaften garnicht genau erfassen. Ich könnte mir vorstellen das man den nächsten Nullpunkt mit einen Gleichungssystem ausrechnen(eher schätzen) <könnte>. Das macht doch aber keine, oder ?? (KISS) Grüße Thomas
@Kai Klaas Tom meint doch bestimmt den Verzug der von den 0V bis zum AuslöseMin. vergeht. Dazu müsste aber die aktuelle Drehzahl bekannt sein. Allerdings ändert die sich innerhalb der 4 Quadranten recht stark. Bei einem 1 Zylinder 4 Taktmotor macht das extrem viel aus. Selbst ein 4. Takt 4 Zylinder hat noch gut Messbare Drehschwingungen. Man muss dann wenigstens für jeweils 180°KW Rechnen, sonst geht es schief mit der Zündung...
Hi, also folgende Problematik bei nicht genauer Nulldurchgangsmessung tritt auf: - der Zeitpunkt der z.B. Zündzeitpunktsberechnung liegst z.B. ca. 300°KW vor dem eigentlichen Zündzeitpunkt. Du gehst dabei von den aktuellen Werten aus die Du gerade misst (Periode, Frequenz) und kannst nur daraus die Winkelkorrektur für den Zündzeitpunkt ableiten. Während der folgenden 300°KW tut sich dann aber noch einiges an der Drehzahl durch z.B. Drehschwingungen und Gradient. Der letzte Zahn vor dem Zündzeitpunkt bildet dann die Referenz für Deinen aktuellen Zündzeitpunkt, allerdings kannst Du leider die aktuelle Korrektur an diesem Zahn nicht mehr korrekt berechnen. Es ist ja leider die Korrektur von vor 300°KW. Deswegen ist gerade für den Anlassfall (sehr niedrige Drehzahl und hohe Gradienten) der Nulldurchgang unerlässlich. - Unipolare Auswertung mit einem Koparator führt leider meist zu Verletzung des Eingangsspannungsbereiches des jeweiligen Komparators. Ausserdem ist die wechselspannungsmässige Belastung des Sensors nicht symmetrisch. Das führt im Bereich der Lücke zu Signalverzerrungen. Deswegen bietet sich die vorgespannte Auswertung an, da hier die Eingangsspannungsbereiche kein Problem sind und die Belastung des Sensors symmetrisch ist. Zusätzlich lässt sich hier einfacher die Durchlaufverzögerung des Impulsformers minimieren. Allerdings alles auf Kosten einer höheren Bauteilanzahl der vorgespannten Lösung. Ich muss natürlich noch fragen, ob Du eine Motor überhaupt befeuern willst. Wenn nicht ist das ganze Bemborium hier unnütz. Für eine einfache Drehzahlerfassung brauchst Du das nicht, da ist der Impulsformer nahezu egal (muss lediglich die Grenzfrequenz abkönnen) ... Gruss
@OP >Ich verstehe nicht was da Integriert werden muß ? >Welche Grösse über was ? Ein induktiver Geber hat eine für ansteigende Frequenzen ansteigende Quellimpedanz. Eingekoppelte hochfrequente Störungen (z.B. Zündimpulse!) können also nicht über eine niederohmige Quellimpedanz zur Masse kurzgeschlossen werden. Deswegen brauchst du in der Regel einen Kondensator am Eingang der Auswerteschaltung, um die Störungen nach Masse abzuleiten. Integrieren tust du einfach über das Signal des Gebers, wobei hier Integrieren lediglich das Tiefpaßfiltern bzw. Aussieben von hochfrequenten Störspikes meint. In dem Link war das immerhin ein 100nF Cap. Kai Klaas
Hallo Signal, > Der Bosch IC wäre natürlich ganz genau mein Ding. > Aber ohne Bezugsquelle... normalerweise hat Rutronik die meisten BOSCH-ICs: http://www.rutronik.com/webgate/stock.php?part=0+272+230+541&supplier=BOSCH
Angehängte Dateien:
-

induktiver_geber.PNG
100 KB
{kind=link}
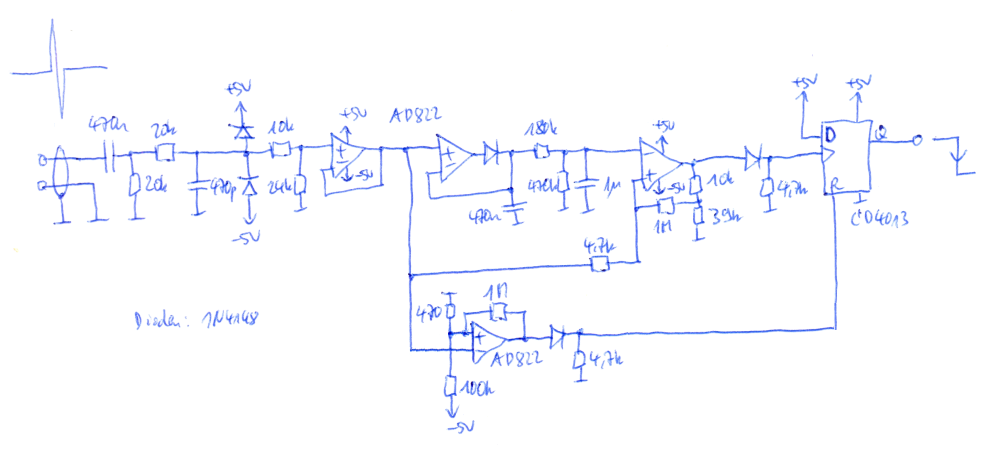
Im Anhang habe ich mal eine Schaltung gezeichnet, die den Nulldurchgang detektiert, aber nur, wenn vorher der positive Peak eine Mindesthöhe überschritten hat, die rund 70% des letzten Gebersignals entspricht. Der Schwellwert ist dabei aber nicht fest, sondern paßt sich dem Signal an. Das Signal am Eingang sollte nicht über 16Vss gehen. Als OPamp kann der AD822 ausprobiert werden. Der AD823 ist noch einmal deutlich schneller. Allerdings verlieren viele Rail-to-Rail OPamp ihre dynamischen Eigenschaften, wenn die Eingangsspannung in die Nähe der Rails kommt. Deswegen habe ich die Eingangsspannung an einigen Stellen auf rund 4V begrenzt. Wird ein erlaubter Nulldurchgang detektiert, gibts zur Belohnung eine 1-0-Flanke am Ausgang des CD4013 Flip-Flops. Die Spannungsversorgung ist +/-5V, damit die OPamps auch im Nulldurchgang ausreichend schnell sind. Außerdem vereinfacht das den Aufbau des adaptiven Schmitt-Triggers. Nicht gezeigt ist die Konstantstrom-Vorerregung des induktiven Gebers, die erforderlich ist, um überhaupt ein Magnetfeld zu erzeugen. Das Kabel zum Geber sollte unbedingt geschirmt ausgeführt werden. Kai Klaas
Kai Klaas schrieb: > Nicht gezeigt ist die Konstantstrom-Vorerregung des induktiven Gebers, > die erforderlich ist, um überhaupt ein Magnetfeld zu erzeugen. In der Regel sitzen da Dauermagneten drin. Jedenfalls in den Typen die wir für den Automotive-Bereich produzieren.
Es gibt von Maxim auch ein Device für diese Applikation, den MAX9924. Mehrere Modi, einstellbare Hysterese sind auch dabei. Der LM1815 ist nicht ohne weiteres für Geberräder mit fehlendem Zahn geeignet, da an dieser stelle die Peak/Threshold Logik leicht außer Tritt kommt.
@... >In der Regel sitzen da Dauermagneten drin. Jedenfalls in den Typen die >wir für den Automotive-Bereich produzieren. Dann kennst du ja sicher auch einige brauchbare Auswerteschaltungen, oder?? Kai Klaas
Kai Klaas schrieb: > Dann kennst du ja sicher auch einige brauchbare Auswerteschaltungen, > oder?? Sorry, aber der Bereich ist nicht bei uns angesiedelt. Bei uns wird nur darauf getestet ob der Geber bei gegebener Zahnzahl, Zahnabstand und Drehzahlbereich die vorgegebene Ausgangsspannung erzeugt.
@ Anja: Danke für Deine Bemühung ! Wenn ich das auf dieskretem weg nicht hinbekomme, bestelle ich dort :) Kai, das Du da gleich eine Schaltung aus dem Ärmel schüttelst... Dachte ich "baue" mich da in den nächsten Tagen Stück für Stück ran. Als Hobby Bastler muss ich erstmal schauen was ich im Keller finde. >Nicht gezeigt ist die Konstantstrom-Vorerregung des induktiven Gebers, >die erforderlich ist, um überhaupt ein Magnetfeld zu erzeugen. Das Kabel >zum Geber sollte unbedingt geschirmt ausgeführt werden. Das wird nicht nötig sein, in dem Geber sitzt Kfz. typisch ein Dauermagnet. Das Triggerrad erzeugt bei Drehung eine Flussänderung, das induziert die Wechselspannung. Ich versuche mal die Funktion der Schaltung auseinander zu dröseln. - Die 470nF + 20kOhm stellen wohl die "definierte" Last dar. - Danach der Tiefpass, sind das wirklich 470pF ? - Die Clampdioden zur Begrenzung der Spannung. - Spannungsteiler zum OP - OP als Impedanzwandler. Jetzt wird es für schon schwierig. - Der untere OP (für den R des FlipFlop) bekommt über das 1nF seine variable Hysterese. Wie hast Du die Werte (23,5mV) mit der 1nF Hysterese berechnet ?? (das stimmt nicht, oder ?) - Im oberen Zweig brauche ich nicht mehr zu versuchen... - Der erste OP ist doch wieder ein Impedanzwandler. - Die 470k 1µF = 0,47 Tau gespeist über 180k ergibt einen Spannungsteiler von ca 2,5-3V ? - Vermutung, der zweite OP komperiert gegen das aktuelle Signal + die 4,7kOhm vor dem Flipflop sind PullDowns + Die Dioden an den Ausgängen der OPs halten Negative Anteile vom Flipflip fern. Schönheitsfehler : Ich habe keine -5V. Stimmt der Rest ? Ich muss mir wohl erst nochmal OPs zu gemüte ziehen. :)
Hallo, >Kai, das Du da gleich eine Schaltung aus dem Ärmel schüttelst... Ist nicht alles von mir. Die Beschaltung des Gebers und die Idee mit dem mitlaufendem Schmitt-Trigger entstammen teilweise dem Artikel "AutoCheck" von Rolf Badenhausen in der ELRAD 5/90. Daher stammt auch die Anmerkung mit der Konstantstrom-Vorerregung des induktiven Gebers. Um die 90iger war das wohl üblich? >- Die 470nF + 20kOhm stellen wohl die "definierte" Last dar. Genaugenommen 470nF + 14,6kOhm, wenn man die Widerstände dahinter noch berücksichtigt. >- Danach der Tiefpass, sind das wirklich 470pF ? Ja, in meinem "Archiv" habe ich zwei Arten von Auswerteschaltungen gefunden, welche mit großem C und solche mit kleinem. Ich dachte mir, daß ein kleines C vielleicht besser mit einem Nulldurchgangs-Detektor konveniert. >- Die Clampdioden zur Begrenzung der Spannung. Genau. >- Spannungsteiler zum OP Genau. Auf rund 4V, wenn die Schutzdioden öffnen, wegen der dynamischen Eigenschaften des AD822. >- OP als Impedanzwandler. Richtig. Keine Verstärkung, da sonst die Ausgangsspannung wieder über 4V steigt. Außerdem sprachst du ja von einer Signalspannung, die eigentlich keine zusätzliche Signalverstärkung erforderlich machen sollte, obgleich ich deine 120V für ein bißchen übertrieben halte. Bei Bedarf läßt sich der erste 20k Widerstand als zusätzlicher Spannungsteiler ausführen. Gegebenenfalls ist das Tiefpaßfilter entsprechend anzupassen. Aber hier mußt du natürlich sowieso die Zeitkonstanten experimentell optimieren. >- Der untere OP (für den R des FlipFlop) bekommt über das 1nF seine >variable Hysterese. Wie hast Du die Werte (23,5mV) mit der 1nF Hysterese >berechnet ?? Der untere OPamp ist als Schmitt-Trigger mit festen Schaltschwellen beschaltet. Er ist der eigentliche Nulldurchgangs-Detektor. Sein Ausgang schaltet auf "high", wenn am "-" Eingang das Gebersignal auf unter rund -26mV fällt, und auf "low", wenn das Gebersignal wieder auf über -21mV steigt. Das Flip-Flop wird also zurückgesetzt, wenn das Gebersignal seinen Nulldurchgang hat, also von positiver Spannung nach negativer Spannung springt. Dein "1nF Hysterese" habe ich nicht verstanden. Du meinst wohl den 1M Widerstand vom "+" Eingang zum Ausgang? "Berechnen" tust du so etwas am schnellsten mit einer Simulation, z.B. mit TINA von Texas Instruments. >- Der erste OP ist doch wieder ein Impedanzwandler. Das ist ein Spitzenwertgleichrichter, der den 470nF Cap auf den positiven Maximalwert des Gebersignals auflädt. >- Die 470k 1µF = 0,47 Tau gespeist über 180k ergibt einen >Spannungsteiler von ca 2,5-3V ? Ja, am 1µF Kondensator hast du dann eine Spannung, die rund 70% des Maximalwerts des Gebersignals entspricht. Bei einem Gebersignal von 4Vs sind das also rund 2,9V, bei einem Gebersignal von 0,4Vs sind das rund 0,29V und bei 40mVs rund 29mV. >- Vermutung, der zweite OP komperiert gegen das aktuelle Signal Genau. Immer wenn der positive Peak des aktuellen Gebersignals rund 70% des Maximalwerts des vorherigen Gebersignals übersteigt, schaltet der Ausgang des Schmitt-Triggers auf logisch "high" und setzt das Flip-Flop. Dieser obere Schmitt-Trigger hat im Gegensatz zum unteren eine sich dem Gebersignal anpassende, mitlaufende Schaltschwelle: Erst muß der positive Peak des Gebersignals den oberen Schmitt-Trigger zum Umschalten bringen und das Flip-Flop setzen, damit der darauffolgende Nulldurchgang (und das Umschalten des unteren Schmitt-Triggers) das Flip-Flip wieder zurücksetzen kann. Ein erfolgreicher Nulldurchgang hat also einen high-low-Sprung am Ausgang des Flip-Flops zur Folge. >+ die 4,7kOhm vor dem Flipflop sind PullDowns >+ Die Dioden an den Ausgängen der OPs halten Negative Anteile vom >Flipflip fern. Genau. >Schönheitsfehler : Ich habe keine -5V. Dafür gibt es kleine aber feine DC-DC-Wandler, z.B. +5V -> +/-5V. >Stimmt der Rest ? Die Schaltung ist natürlich nur ein allererster Entwurf. Entscheidend ist, wie das Gebersignal konkret aussieht und wie es mit der Drehzahl variiert. Kai Klaas
Kai Klaas schrieb: > Dein "1nF Hysterese" habe ich nicht verstanden. Du meinst wohl den 1M > Widerstand vom "+" Eingang zum Ausgang? Ups, Ich habe einen Kondensator gesehen. Vor Monaten hatte ich das Signal Oszilloskopiert. Es sah ausserhalb der Lücke sehr nach einem Sinus aus. Habe am Freitag ein wenig gepfuscht und mit dem Multimeter gemessen : Anlasserdrezahl -> 2,4V 950 -> 10V 2000 -> 20,7 3000 -> 31 4000 -> 38,1 5000 -> 50 6000 -> 61,1 Für mich sieht das nach einer sehr schönen linearen Abhängigkeit aus. Jetzt bin ich am Zug mit dem aufbauen... :) Vielen Dank für die Zeit und Mühe !!!
Beitrag #6434015 wurde von einem Moderator gelöscht.
Dieser Beitrag ist gesperrt und kann nicht beantwortet werden.