Hi, ich hab ein paar Fragen zum oben genannten Schrittmotortreiber, bei denen ich mir anhand der Aussagen im Datenblatt noch nicht ganz sicher bin: Lässt sich der Ausgangsstrom nur mit TQ1 und TQ2 über 4 Stufen digital einstellen? Wieso ist das im Datenblatt so seltsam mit den Prozentangaben beschrieben? Der Schrittmotortreiber ist für 3,5A pro Phase ausgelegt, soll ich dann davon die jeweils 100%, 75%, 50% und 20% davon nehmen? Ergo 3.5A, 2.62A, 1.75A, und 0.7A? Können Logikspannung und Motorspannung gleichzeitig hochgefahren werden oder müssen zuerst die 5V fest anliegen bevor die Motorspannung angelegt werden darf? Sind hier irgendwie Freilaufdioden empfehlenswert oder sogar notwendig? Im Datenblatt steht nämlich nichts davon, die Chinesen machen jedoch welche hin, sieht man auf diversen Schrittmotorsteuerungen die bei eBay angeboten werden. Ist es in Ordnung den Not-Reset Eingang permanent auf High zu legen? Ich brauch kein Reset und wüsste jetzt auch nicht wozu das gut ist. Um die Mikrostepping Treiberstufe zu resetten? Sind 100n bzw. 1µ Kondensatoren direkt an den Eingängen der Logikspannung notwendig oder reicht eine vom Netzteil aus stabile Spannung? (Auf der Netzteilplatine mit 100µ, 1µ.. 100n geglättet und stabilisiert) Wie schauts mit der Motorspannung aus? Was sind die Vorteile/Nachteile von hohen Schaltfrequenzen? Nachteile wärn doch u.A. die Schaltverluste, Vorteil wäre, dass die Induktivität des Motors besser genutzt wird, aber in wie fern ist das gut? mfg PoWl
Hi Paul, Beschäftige mich ebend auch mit dem IC TG Einstellung: Ja nur da mit läst sich der Strom einstellen. Der Strom richtet sich aber auch nach der Größe des Wiederstand am Pin NFA und NFB ! Ich habe 0,18 Ohm verbaut um auf den Max Strom zu kommen. Spannung ist bei mir ca. 35 Volt DC. IC oder Brücke Schalten ?: Auf jeden fall sollte man erst die Logik mit 5 Volt versorgen und dann die Brücke ein schalten. Erfahrungsbericht aus anderen Foren. Freilaufdioden: Freilaufdioden sollten auf jeden fall rein. Nicht unbedingt Standart sonder welche die schnell schalten. z.B. UF5404. Sind sehr groß, können auch etwas kleiner sein. Reset: Habe ich auch ignoriert. Brücke und fertig. Elkos: Sieb Elkos sollten auch mit drauf, da der Leistungsteil sehr dicht neben dem Logikteil verläuft. Die Pinbeleung ist bescheiden von 6560HQ Vor-Nachteile: Am besten läuft mein Bipolar Schrittmotor im Standart Mode. Je höher ich die Frequenz stelle um so schlechter läuft der Motor. Aber ich denke mal das hängt von jedem Motor ab. Besser oder schlechter gibt es in dem Sinne nicht. Hoffe ich konnte dir etwas helfen. PS: Bitte verbessert mit, ich bin kein Profie. Gnade vor Recht ;-)
Angehängte Dateien:
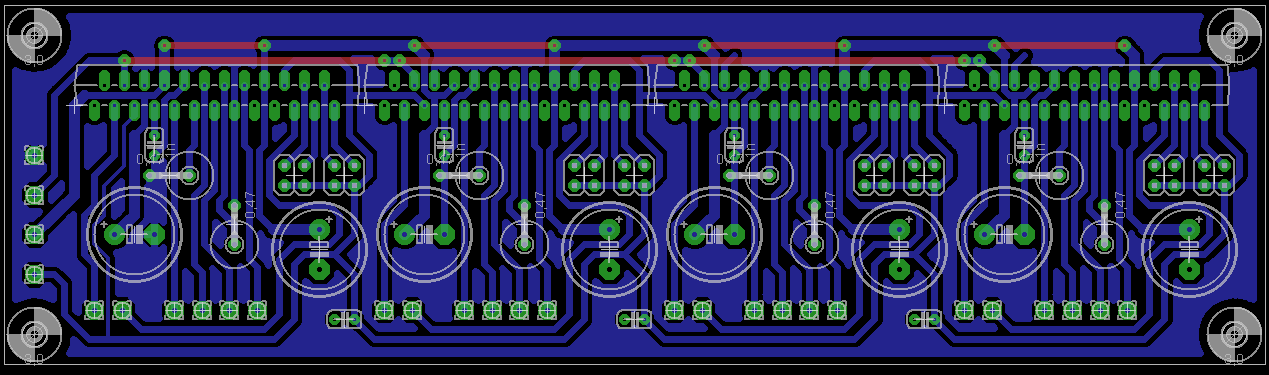
Hi, hätte nach so langer Zeit garnicht mehr mit einer Antwort gerechnet und wusste nichts mehr von diesem Thread. Aber trotzdem danke! Die Freilaufdioden sind beim TB6560AHQ im Gegensatz zum HQ nicht mehr nötig, daher habe ich mir ein paar AHQ-Treiber bestellt. Was für Konsequenzen kann das haben wenn die Brücke zuerst mit Spannung versorgt wird? Beispielsweise wenn ich die Logikspannung über einen Schaltregler erzeuge, der braucht ja erstmal ein wenig bis er das erste mal die 5V bereitstellt. Ist eine verzögerte Zuschaltung der Brückenspannung vonnöten oder nur reine Präventivmaßnahme gegen den worst case? Habe mal schon vor längerer Zeit ein Platinenlayout für die TB6560AHQ entworfen. Oben wo die Leiterbahn für den Motorstrom verläuft würde ich dann einfach einen 0,8mm Draht durchfädeln und über die ganze Strecke hin festlöten, da passt dann genug Strom durch. Die Elkos werden dann Low-ESR-Typen, dann passt das denke ich mal auch.
> Lässt sich der Ausgangsstrom nur mit TQ1 und TQ2 über 4 Stufen digital > einstellen? Wieso ist das im Datenblatt so seltsam mit den > Prozentangaben beschrieben? Weil der tatsächliche Strom vom externen Widerstand abhängt. > Der Schrittmotortreiber ist für 3,5A pro Phase ausgelegt, soll ich > dann davon die jeweils 100%, 75%, 50% und 20% davon nehmen? Ergo > 3.5A, 2.62A, 1.75A, und 0.7A? Nein. Du solltest den maximalen Strom an deine Schrittmotoren anpassen. Dabei kann man mit 100% durchaus über das erlaubte Maximum der Schrittmotoren gehen, wenn das nur kurzzeitig erfolgt, z.B. beim Beschleunigen, und die 75% dann der Normalstrom sein sollen. Wenn die Schrittmotoren nur ihre Position halten sollen, kann man digital vorgeben, daß nur reduzierter Strom und damit reduzierte Wärmeabgabe anliegen soll. > Können Logikspannung und Motorspannung gleichzeitig hochgefahren werden > oder müssen zuerst die 5V fest anliegen bevor die Motorspannung angelegt > werden darf? Das Datenblatt sagt deutlich, daß Logikspannung zuerst stabil sein soll. > Sind hier irgendwie Freilaufdioden empfehlenswert oder sogar notwendig? > Im Datenblatt steht nämlich nichts davon, die Chinesen machen jedoch > welche hin, sieht man auf diversen Schrittmotorsteuerungen die bei eBay > angeboten werden. Daraus kann man schlussfolgern, daß die internen nicht gut genug sind. > Ist es in Ordnung den Not-Reset Eingang permanent auf High zu legen? Ich > brauch kein Reset und wüsste jetzt auch nicht wozu das gut ist. Um die > Mikrostepping Treiberstufe zu resetten? Du brauchst RESET, wenn du das Mikrostepping verändern willst, also z.B: beim Fräsen mit 1/16 arbeiten willst, zum schnellen Verfahren aber mit 1/2 arbeiten willst. Dann muß der Übergang taktsynchron erfolgen, und damit musst du die internen Zähler definiert rücksetzen können. > Sind 100n bzw. 1µ Kondensatoren direkt an den Eingängen der > Logikspannung notwendig oder reicht eine vom Netzteil aus stabile > Spannung? Jeder IC braucht in seiner direkten Nähe niedrigimpedante Stützkondensatoren. Ob die 100nF reichen oder man die 1uF wirklich braucht, ist jedoch offen. > Wie schauts mit der Motorspannung aus? Die wird noch mehr belastet. Angenommen du hast Motoren mit 2.4V/3.5A an 24V. Dann werden vom Chopper kurz 24V an den Motor angelegt, bis der Strom auf 3.5A gestiegen ist, dann wird lange ausgeschaltet, bis der Stro wieder unter 3.5A flällt (dauert 10 mal so lange). Im Mittel braucht der Schrittmotor also nur 350mA, aber die Stromimpulse pro Spule liegen bei 3.5A. Das müssen die Kondensatoren ausgleichen, denn ein 350mA Netzteil hat keine ausreichenden Kondensatoren. Du brauchst also niedrigimpedante LowESR Elkos mit recht hoher Kapazitätt in der Nähe der Schrittmotortreiber, die dann langsam über das Netzteil nachgeladen werden. > Was sind die Vorteile/Nachteile von hohen Schaltfrequenzen? Nachteile > wärn doch u.A. die Schaltverluste, Vorteil wäre, dass die Induktivität > des Motors besser genutzt wird, aber in wie fern ist das gut? Die Vorteile sind vor allem, daß die oben angesprochenen Elkos einen kleineren Wert haben können, und dass der Strom beim ständigen Ein- und Ausschalten des Choppers nicht extrem stark steigt und fällt, sodenr eben nur um ein paar Prozent Abweichung von 3.5A stigt und fällt. Der Nachteil liegt darin, daß dein Platinenlayout wie bei einem Schaltregler auch die hohen Frequenzen unterstützen muss - deins tut das nicht, und daß bei zu hoher Schaltfrequenz un hohen INduktivitäten im Motor der Strom nciht schnell genug fällt, man also die Spulen nicht schnell genug ausschalten kann. Dazu hat der TB6560 immerhin schnelles Bremsen und langsames Bremsen DCY1 und DCY2. Deine Platine trägt den Anforderungen des TB6560 in keinster Weise Rechnung. Die Beitrag "TB6560HQ wird ohne Last warm" Autor: Michael Schildt (mschildt) Datum: 15.02.2010 22:16 hat zwar Dioden, Optokopler, Einschaltsequenz, ist aber auch nicht so gut, weil die Elkos nicht dicht genug an den Treibern sitzen.
Hi, danke für die Hinweise. Ich verwende die TB6560AHQ, die brauchen keine Dioden mehr (steht auch im Datenblatt nochmal explizit). Optokoppler brauche ich nicht auf der Platine, die kommen dann vorne dran oder garnicht. Die sind doch auch nur da um im Fehlerfall den Parallelport zu schützen, mit dem man solche Platinen meistens ansteuert, hm? Und der Fehlerfall sieht bei mir so aus, dass ein IC irgendeine Fehlfunktion hat. Einschaltsequenz kann ich noch dazu machen, so dass einfach nach ner kurzen Zeit ein Relais die Motorspannung bereitstellt. In wie Fern ist mein Layout sonst noch problematisch? Bei 50-100kHz kommt es doch nicht schon zu irgendwelchen störenden HF-Effekten, oder? Sind die zwei Low-ESR Elkos tatsächlich schon zu weit vom IC weg? Die Motorspannung wird außerdem auch ganz ordentlich vom Netzteil gepuffert. lg PoWl
> die brauchen keine Dioden mehr Nein. > Die sind doch auch nur da um im Fehlerfall den Parallelport zu schützen Nein. > Bei 50-100kHz kommt es doch nicht schon zu irgendwelchen störenden HF-Effekten, oder? Doch. Du schaltest 4A 24V mit 1us Flankensteilheit, und hast daneben eine Stromauswertung die auf 0.1V genau reagieren soll. > so dass einfach nach ner kurzen Zeit ein Relais die Motorspannung bereitstellt Achtung beim Ladestrom der doch grossen (noch entladenen) Elkos. > Sind die zwei Low-ESR Elkos tatsächlich schon zu weit vom IC weg? Das nicht unbedingt, aber sie liegen Hf-technisch ungünstig. > Die Motorspannung wird außerdem auch ganz ordentlich vom Netzteil gepuffert Nur wenn das massiv überdimensioniert ist und dicht dran wäre, also ohne Kabel angeschlossen wäre. Eigentlich wurde im Beitrag davon alles gesagt.
OK, d.h. die Shuntwiderstände sollten nicht auf der Seite liegen, auf der auch die Kondensatoren liegen bzw. die Leiterbahnen nicht so dicht aneinander? Ich habe die Platine so designed damit ich den Kühlkörper noch gescheit unterkriege. Aber vielleicht wäre es doch sinnvoll wenn ich mir einfach mal eine kaufe und mir anschaue, wie die so aufgebaut ist. Zu den Optokopplern, welchen Zweck erfüllen die denn dann?
> Zu den Optokopplern, welchen Zweck erfüllen die denn dann? Unterdrückung von Störungen in dem sie GND unterbrechen, mit der sonst die schnell geschaltete Hochstromseite auf die Masse des PCs gelegt werden würde, der seinerseits am Schutzleiter hängt. Lieber die Motorelektronik potentialfrei an der Fräse, und wegführende Leitungen per Drosseln störfrei halten. > Ich habe die Platine so designed damit ich den Kühlkörper noch gescheit unterkriege Ja, das ist durchaus ein Problem, die kommerziellen Lösungen zeigen da ja verschiedene Ansätze.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.