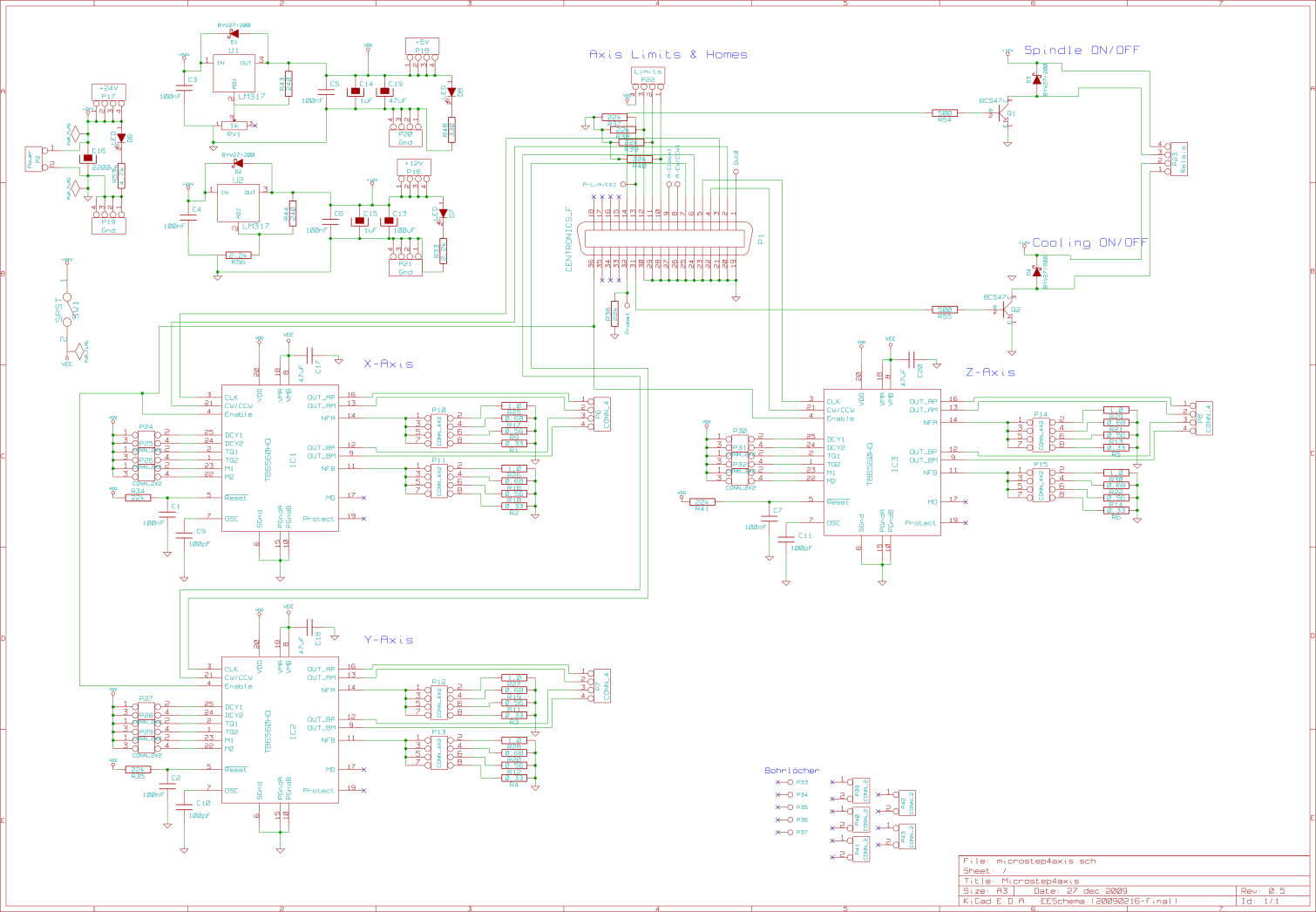
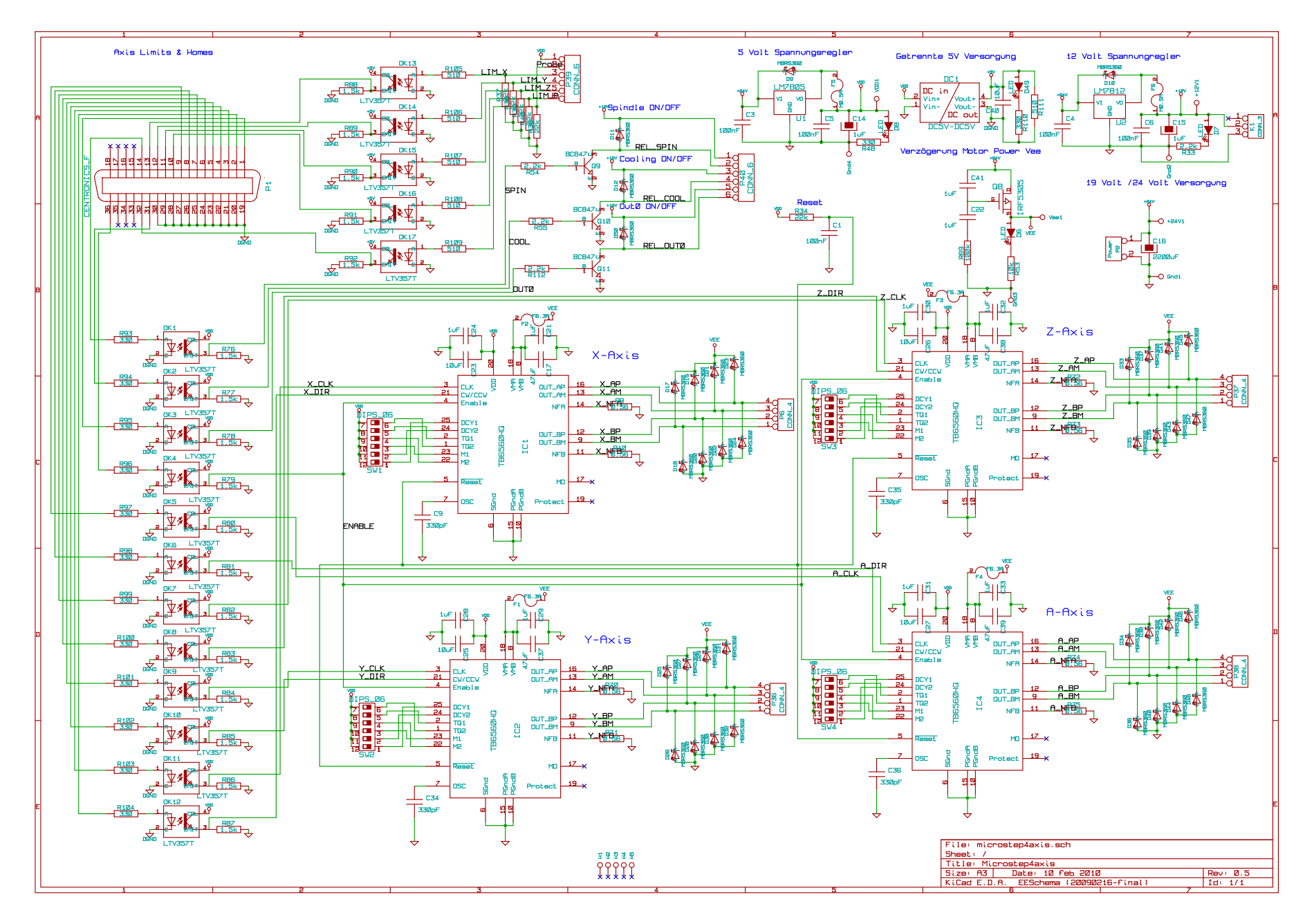
Hi, ich habe mir eine 3 Kanal Schrittmotor Steuerung für EMC mittels drei TB6560HQ am Parallelport aufgebaut und sie läuft auch, die drei Schrittmotoren lassen sich mit EMC2 kontrollieren. Doch leider, ein TB6560 wird warm, selbst wenn ich nur die 5V Versorgungsspannung anlege. Und ein LM317, der die Spannung generiert wird schnell heiß. Es wird offensichtlich sehr viel Strom vom TB6560 gezogen. Laut Datenblatt sollte das aber eher im 5mA Bereich sein. Die TB6560 sind alle identisch angeschlossen. Bei problematischen TB6560 hatte ich einmal beim Testen Pin 19 (Protect-Output) und Pin 18 (Motor Power=19V) vertauscht. Allerdings ist Pin 19 ein Open-Drain, da dürfte ja nichts passiert sein. Woran erkenne ich, ob der TB6560 ein Problem hat. Einfach mal tauschen kann ich den TB6560 nicht, da sie alle fest eingelötet sind. Hatte jemand schon mal so einen Effekt? Was kann ich noch testen? Der Schaltplan mit KiCad ist angefügt. Grüße, Michael
Angehängte Dateien:
-

microstep4axis.png
210 KB
> Bei problematischen TB6560 hatte ich einmal beim Testen Pin 19 > (Protect-Output) und Pin 18 (Motor Power=19V) vertauscht. > Allerdings ist Pin 19 ein Open-Drain, da dürfte ja nichts passiert sein. Hö hö, das wird der Chip anders sehen. Aber wenn ich deinen Schaltplan so sehe: 100pF ergeben eine ziemlich hohe Schaltfrequenz und die geht über die per Jumper (welcher Jumper schafft 3.5A? Ok, deine 0.33R erlauben nur 1.5A) an deine Shuntwiderstandsarmee ? Das sieht doch nach kommenden Problemen mit Leitungsinduktivitäten aus. Warum spendierst du keine Schottky-Freilaufdioden an den Motorausgängen ? Macht sogar jeder Chinese, und der würde sie sparen, wenn man sie sparen könnte. (Dafür hast du aber dicke Dioden an den Relais und eher überflüssigerweise an den Spannungsreglern, also an Dioden kann's dir nicht mangeln, auch wenn die BYV keine Schottkys sind wie fälschlicherweise im Schaltbild dargestellt). 500 Ohm als Basisvorwiderstand vor einem BC547? Keine galvanische Trennung per Optiokoppler von PC und Lastkreis ? Warum steht im Datenblatt 47uF und 1uF wenn du nur 47uF spendierst? Ist dir der 1uF SMD Vielschichtkeramikkondensator zu teuer ? Und dann donnerst du mit maximaler Schaltfrequenz auf den Chip ein? Und wenn ich das richtig sehe, erzeugst du die 5V VCC aus den 24V VDD, wie willst du da die im Datenblatt geforderte Power-Up Sequenz "erst VCC, dann VDD" sicherstellen ? Nicht ganz so kritisch, aber fragwürdig: Warum LM317 mit aufwändigen Widerständen und gar Potis und nicht uA7805 und uA7812 ? Dann hättest du vielleicht auch gemerkt, dass die dicken Elkos nicht an den Ausgang kommen, sondern dort die 100nF zu finden sind die du an den Eingang gehängt hast. Das wird noch ein langer Weg bis zur funktionierenden Motorsteuerung, vielleicht sollte du fertig per eBay aus HongKong kaufen. Die TB6560 sind eigentlich ganz nett, weil sie eine Umschaltung des Motorstromes, der Mikroschritte und des Bremsverhaltens im Betrieb ermöglichen, so kann man die Motoren im Schnellgang verfahren und im sauberen Mikroschritt mit Power arbeiten lassen, und nach dem Fahren auf einen Strom zurückgehen der nur noch dem Haltemoment entspricht (und dadurch die Motoren mit etwas mehr Strom fahren als zulässig, um mehr Drehmoment und damit weniger aus Versehen ausgelassene Schritte zu bekommen) weil sie sich in der nicht-benutzen Phase wieder abkühlen können. Aber all das nutzt du hier nicht, offenbar weil du keine Schaltung spendieren willst, die das aus den Steuersignalen gewinnt (retriggerbares MonoFlop aus CLK zur Reduzierung, differenzierte CLK Frequenz zur Entscheidung wann gebremst wird, Spindel Aus als Indiz wann im Schnellgang verfahren werden soll muss aber pro Baustein mit M0 synchronisiert werden). Sind dir die Bauteile dazu zu teuer?
Hi MaWin! MaWin schrieb: >> Bei problematischen TB6560 hatte ich einmal beim Testen Pin 19 >> (Protect-Output) und Pin 18 (Motor Power=19V) vertauscht. >> Allerdings ist Pin 19 ein Open-Drain, da dürfte ja nichts passiert sein. > > Hö hö, das wird der Chip anders sehen. Sei doch so nett und erklär mir warum? Der Protect-Ausgang schaltet durch, wenn der Chip zu heiß wird und ist ansonsten hochohmig und es fließt kein Strom. Welche Spannung (5.5 oder 26.4V) der Protect-Ausgang verträgt, erschließt sich mir leider nicht aus dem Datenblatt. > > Aber wenn ich deinen Schaltplan so sehe: > > 100pF ergeben eine ziemlich hohe Schaltfrequenz und die geht über die > per Jumper (welcher Jumper schafft 3.5A? Ok, deine 0.33R erlauben nur > 1.5A) an deine Shuntwiderstandsarmee ? Das sieht doch nach kommenden > Problemen mit Leitungsinduktivitäten aus. Ja, 100pF ergibt ca. 400kHz und ist im erlaubten Bereich. Allerdings kommt die Frequenz nicht an den Widerständen an, sondern äußert sich als Welligkeit durch die Stromsteuerung. Wenn eine Wechselspannung an den Widerständen ankommt, dann die maximal erlauben 15kHz des CLK-Eingang und das ist eindeutig noch NF. (Man kann die Widerstände auch kombinieren, die sind ja nicht nur exklusiv steckbar. Da kommt man auch über 3.5A wenn man das unbedingt will.) > > Warum spendierst du keine Schottky-Freilaufdioden an den Motorausgängen > ? Macht sogar jeder Chinese, und der würde sie sparen, wenn man sie Weder im alten(2006) oder im neuen Datenblatt(2009), noch im Application Note(2009) von Toshiba ist die Notwendigkeit beschrieben (hier im Forum übrigens auch nicht: Beitrag "Re: Gibt es integrierte Freilaufdioden oÄ?!"). Schaden würden sie sicher nicht, nur nützen vermutlich auch wenig.) > sparen könnte. (Dafür hast du aber dicke Dioden an den Relais und eher > überflüssigerweise an den Spannungsreglern, also an Dioden kann's dir Die sind für den Fall drin, das die 24Volt schneller abbauen als die 5 und 12 Volt und die Spannungsdifferenz negativ wird, siehe auch http://www.elektronik-kompendium.de/public/schaerer/ureg3pin.htm > nicht mangeln, auch wenn die BYV keine Schottkys sind wie > fälschlicherweise im Schaltbild dargestellt). Stimmt sind keine Schottkys nur schnelle Dioden, danke für den Tipp. > > 500 Ohm als Basisvorwiderstand vor einem BC547? Bei 3,3Volt die von der parallelen Schnittstelle kommen, sind das 6,7mA Basis-Emitterstrom, finde ich jetzt nicht kritisch, da Peak für Basis Emitterstrom mit 200mA angegeben ist und ich nicht die volle Stromverstärkung brauche. > > Keine galvanische Trennung per Optokoppler von PC und Lastkreis ? Kann man machen, denn es schützt den PC vor Schaden. Wenn man es nicht macht ist es eigenes Risiko, beeinträchtigt aber nicht die Funktionsweise. > > Warum steht im Datenblatt 47uF und 1uF wenn du nur 47uF spendierst? > Ist dir der 1uF SMD Vielschichtkeramikkondensator zu teuer ? Habe ich einfach vergessen, muss ich nachholen. > Und dann donnerst du mit maximaler Schaltfrequenz auf den Chip ein? > > Und wenn ich das richtig sehe, erzeugst du die 5V VCC aus den 24V VDD, > wie willst du da die im Datenblatt geforderte Power-Up Sequenz "erst > VCC, dann VDD" sicherstellen ? Das mache ich manuell per Schalter (im Schaltplan links), da das für meine Aufgaben ausreicht. Wenn du aber eine einfach Möglichkeit kennst, das sicher und automatisch mit ein paar Bauteilen zu erledigen, bin ich sehr interessiert an deiner Lösung. > > Nicht ganz so kritisch, aber fragwürdig: Warum LM317 mit aufwändigen > Widerständen und gar Potis und nicht uA7805 und uA7812 ? Dann hättest du Was ist daran aufwändig? Ich nehme sonst immer die Festspannungsregler, mir war diesmal eben nach einstellbaren Spannungsreglern, da ich mal damit arbeiten wollte. > vielleicht auch gemerkt, dass die dicken Elkos nicht an den Ausgang > kommen, sondern dort die 100nF zu finden sind die du an den Eingang > gehängt hast. Es sind sowohl am Eingang, als auch am Ausgang 100nF und "dicke" Kondensatoren vorhanden. > > Das wird noch ein langer Weg bis zur funktionierenden Motorsteuerung, Sie ist schon aufgebaut und funktioniert bereits, siehe 1. Beitrag. Ich habe lediglich gefragt, ob erhöhter Stromverbrauch ein Zeichen für einen defekten TB6560HQ sein kann. > vielleicht sollte du fertig per eBay aus HongKong kaufen. Wenn mich nur das Ziel interessieren würde, würde ich das sicher auch machen. > > Die TB6560 sind eigentlich ganz nett, weil sie eine Umschaltung des > Motorstromes, der Mikroschritte und des Bremsverhaltens im Betrieb > ermöglichen, so kann man die Motoren im Schnellgang verfahren und im > sauberen Mikroschritt mit Power arbeiten lassen, und nach dem Fahren auf > einen Strom zurückgehen der nur noch dem Haltemoment entspricht (und > dadurch die Motoren mit etwas mehr Strom fahren als zulässig, um mehr > Drehmoment und damit weniger aus Versehen ausgelassene Schritte zu > bekommen) weil sie sich in der nicht-benutzen Phase wieder abkühlen > können. > > Aber all das nutzt du hier nicht, offenbar weil du keine Schaltung > spendieren willst, die das aus den Steuersignalen gewinnt > (retriggerbares MonoFlop aus CLK zur Reduzierung, differenzierte CLK > Frequenz zur Entscheidung wann gebremst wird, Spindel Aus als Indiz wann > im Schnellgang verfahren werden soll muss aber pro Baustein mit M0 > synchronisiert werden). Sind dir die Bauteile dazu zu teuer? Da ich mit 1A pro Phase arbeitete, werden die Chips nicht so warm und ich benötige die ausgefeilten Strategien zum raus kitzeln des letzten Quäntchens Leitung nicht. Wenn der Fall doch mal eintritt, werde ich mich an deinen Post erinnern. Mein Ziel war eine einfache Steuerkarte für drei Achsen, mit der ich Schrittmotoren bis 3A pro Phase in Voll, Halb- und Mikroschritt ansteuern kann und die per EMC-Software steuerbar ist. Meine Gründe für die Wahl des TB6560 waren die wenigen zusätzlich notwendigen Bauteile, die einfache Ansteuerung (Step, Direction, Enable) und die Möglichkeit Mikroschritte zu nutzen. Viele Grüße, Michael
> Sei doch so nett und erklär mir warum? Kein Transistor des 5V CMOS Bereichs hält 19V aus, absolute maximum rating ist 5.5V (weil umgekehrt gepolte PN-Übergänge, siehe die BE-Diode eines Transistors, recht zuverlässig zwischen 6V und 7V wie eine Z-Diode anfangen zu leiten). Wenn der PN-Übergang bricht, fliesst der Strom über die Wanne in den ganzen Chip, und die 19V reichen noch, um auch eine zweite PN-Barriere zu überwinden, da floss also der Strom überallhin. > Ja, 100pF ergibt ca. 400kHz und ist im erlaubten Bereich. Aber kaum bei deinem zu vermutenden nicht-Hf-Schaltregler-sicheren Aufbau. > Allerdings kommt die Frequenz nicht an den Widerständen an Sehr wohl. Und an jeder Stromrichtungsänderung gibt es an den Induktivitäten der Zuleitung und des Widerstands hässliche Überschwinger und Resonanzen, die sich direkt auf die Messgenauigkeit auswirken. Soll ich dir die Spannungsverläufe am Shunt eines TB6560 mal zeigen ? > Weder im alten(2006) oder im neuen Datenblatt(2009), noch im > Application Note(2009) von Toshiba ist die Notwendigkeit > beschrieben Im Datenblatt steht: Die Ausgangstransistoren schalten den Strom der sonst durch die Dioden fliesst, aber mit 300ns Verzögerung. Bis zu den 300ns Verzögerung fliesst der Strom durch die Dioden. Die sind aber (siehe Datenblatt, kein Wort dazu) nicht als Freilaufdioden spezifiziert. Ich nehme nicht an, daß die Chinesen freiwillig externe Dioden spendieren, die werden durch Ausfälle gelernt haben. Die Spannung an den Motoranschlüssen geht jedenfalls ohne externe Schottkys problemlos auf -1.1V und Ub+1.1V, die internen Dioden leiten also nicht so gut, sind ja auch nur die parasitären Dioden der MOSFETs. > Die sind für den Fall drin, das die 24Volt schneller abbauen als die 5 > und 12 Volt Mach die dicken Elkos an den Ausgängen weg, und die Situation kann nicht auftreten. > Kann man machen, denn es schützt den PC vor Schaden. Wenn man es > nicht macht ist es eigenes Risiko, beeinträchtigt aber nicht die > Funktionsweise. Das kann sehr wohl die Funktion beinträchtigen. > Das mache ich manuell per Schalter (im Schaltplan links), da das für > meine Aufgaben ausreicht. Wenn du aber eine einfach Möglichkeit kennst, > das sicher und automatisch mit ein paar Bauteilen zu erledigen, bin ich > sehr interessiert an deiner Lösung. P-Kanal-MOSFET in 24V/19V Leitung, angesteuert von einer Zeitverzögerung wie bei RESET. Bei 19V geht es noch ohne Gate-Schutz, darüber muss das Gate vor mehr als 20V unter VDD geschützt werden. > Was ist daran aufwändig? Ich nehme sonst immer die Festspannungsregler, > mir war diesmal eben nach einstellbaren Spannungsreglern, da ich mal > damit arbeiten wollte. Was willst du da arbeiten? Testen, ob der TB ab 6.5V kaputt geht ?
MaWin schrieb: >> Sei doch so nett und erklär mir warum? > > Kein Transistor des 5V CMOS Bereichs hält 19V aus, absolute maximum > rating ist 5.5V (weil umgekehrt gepolte PN-Übergänge, siehe die BE-Diode > eines Transistors, recht zuverlässig zwischen 6V und 7V wie eine Z-Diode > anfangen zu leiten). Wenn der PN-Übergang bricht, fliesst der Strom über > die Wanne in den ganzen Chip, und die 19V reichen noch, um auch eine > zweite PN-Barriere zu überwinden, da floss also der Strom überallhin. Das klingt plausibel und gleichzeitig fatal, da kann ich sicher sein, dass ich den Chip getötet habe. Da werde ich nächste Mal besser aufpassen. Nun ja, neuer Chip ist jetzt bestellt. > >> Ja, 100pF ergibt ca. 400kHz und ist im erlaubten Bereich. > > Aber kaum bei deinem zu vermutenden nicht-Hf-Schaltregler-sicheren > Aufbau. Da ich mich im HF-Bereich nicht auskenne, kann ich das selber nicht beurteilen. Als Stromversorgung nutze ich im Moment ein altes Laptop-Netzteil mit 19Volt und 3.5A. Solange ich nicht alle Achsen gleichzeitig mit voller Leistung nutze, dürfte das für meine kleinen Motoren reichen. > >> Allerdings kommt die Frequenz nicht an den Widerständen an > > Sehr wohl. Und an jeder Stromrichtungsänderung gibt es an den > Induktivitäten der Zuleitung und des Widerstands hässliche Überschwinger > und Resonanzen, die sich direkt auf die Messgenauigkeit auswirken. Soll > ich dir die Spannungsverläufe am Shunt eines TB6560 mal zeigen ? Da ich kein Oszi habe, kann ich es mir nicht anschauen. Ich würde tatsächlich gerne ein paar solcher Kurvenverläufe sehen wollen. Und, was ist denn eine sinnvolle Schaltfrequenz für meine Schaltung? > >> Weder im alten(2006) oder im neuen Datenblatt(2009), noch im >> Application Note(2009) von Toshiba ist die Notwendigkeit >> beschrieben > > Im Datenblatt steht: Die Ausgangstransistoren schalten den Strom der > sonst durch die Dioden fliesst, aber mit 300ns Verzögerung. > Bis zu den 300ns Verzögerung fliesst der Strom durch die Dioden. Die > sind aber (siehe Datenblatt, kein Wort dazu) nicht als Freilaufdioden > spezifiziert. Ich nehme nicht an, daß die Chinesen freiwillig externe > Dioden spendieren, die werden durch Ausfälle gelernt haben. Die Spannung > an den Motoranschlüssen geht jedenfalls ohne externe Schottkys > problemlos auf -1.1V und Ub+1.1V, die internen Dioden leiten also nicht > so gut, sind ja auch nur die parasitären Dioden der MOSFETs. Ich werde sie noch hinzufügen, die Schaltung soll auf längere Zeit funktionieren. Wie ist denn die Verzögerung der BYV27? Im Datenblatt finde ich nur eine Reverse recovery time von 25ns, aber die ist wohl für den Fall von leitend nach nicht leitend? Gibt es eine besser Wahl für die Dioden? Die BYV sind ja nicht wirklich preiswert. >> Kann man machen, denn es schützt den PC vor Schaden. Wenn man es >> nicht macht ist es eigenes Risiko, beeinträchtigt aber nicht die >> Funktionsweise. > > Das kann sehr wohl die Funktion beeinträchtigen. Du meinst, wenn die Schnittstelle kaputt geht oder? Wie versorgt man die Optokoppler der Eingänge (der parallelen Schnittstelle) ohne viel Aufwand? Es ist nicht sinnvoll die Versorgung der Steuerkarte zu nutzen, oder? PC-USB Schnittstelle? ein zusätzliches Netzteil? > >> Das mache ich manuell per Schalter (im Schaltplan links), da das für >> meine Aufgaben ausreicht. Wenn du aber eine einfach Möglichkeit kennst, >> das sicher und automatisch mit ein paar Bauteilen zu erledigen, bin ich >> sehr interessiert an deiner Lösung. > > P-Kanal-MOSFET in 24V/19V Leitung, angesteuert von einer Zeitverzögerung > wie bei RESET. Bei 19V geht es noch ohne Gate-Schutz, darüber muss das > Gate vor mehr als 20V unter VDD geschützt werden. Ich werde das im Schaltplan aufnehmen. > >> Was ist daran aufwändig? Ich nehme sonst immer die Festspannungsregler, >> mir war diesmal eben nach einstellbaren Spannungsreglern, da ich mal >> damit arbeiten wollte. > > Was willst du da arbeiten? Testen, ob der TB ab 6.5V kaputt geht ? Nein, ich wollte wirklich einfach nur mal ein LM317 verwenden. Auch wenn es für solche Standardspannungen natürlich sinnfrei ist. Schonmal danke für die Hilfe, ich werde den aktualisierten Schaltplan im neuen Jahr rein stellen. Komme vorher nicht mehr dazu. In diesem Sinne schönen und unfallfreien Jahreswechsel, Michael
Angehängte Dateien:
-

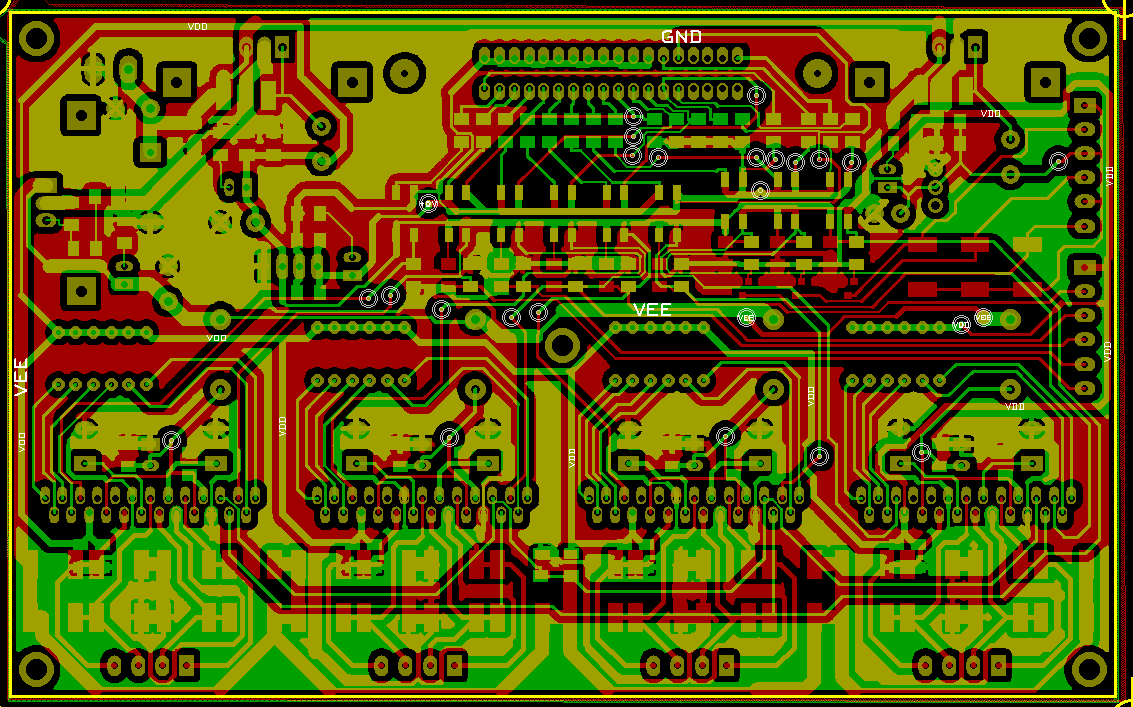
kicad_render.jpg
290 KB -

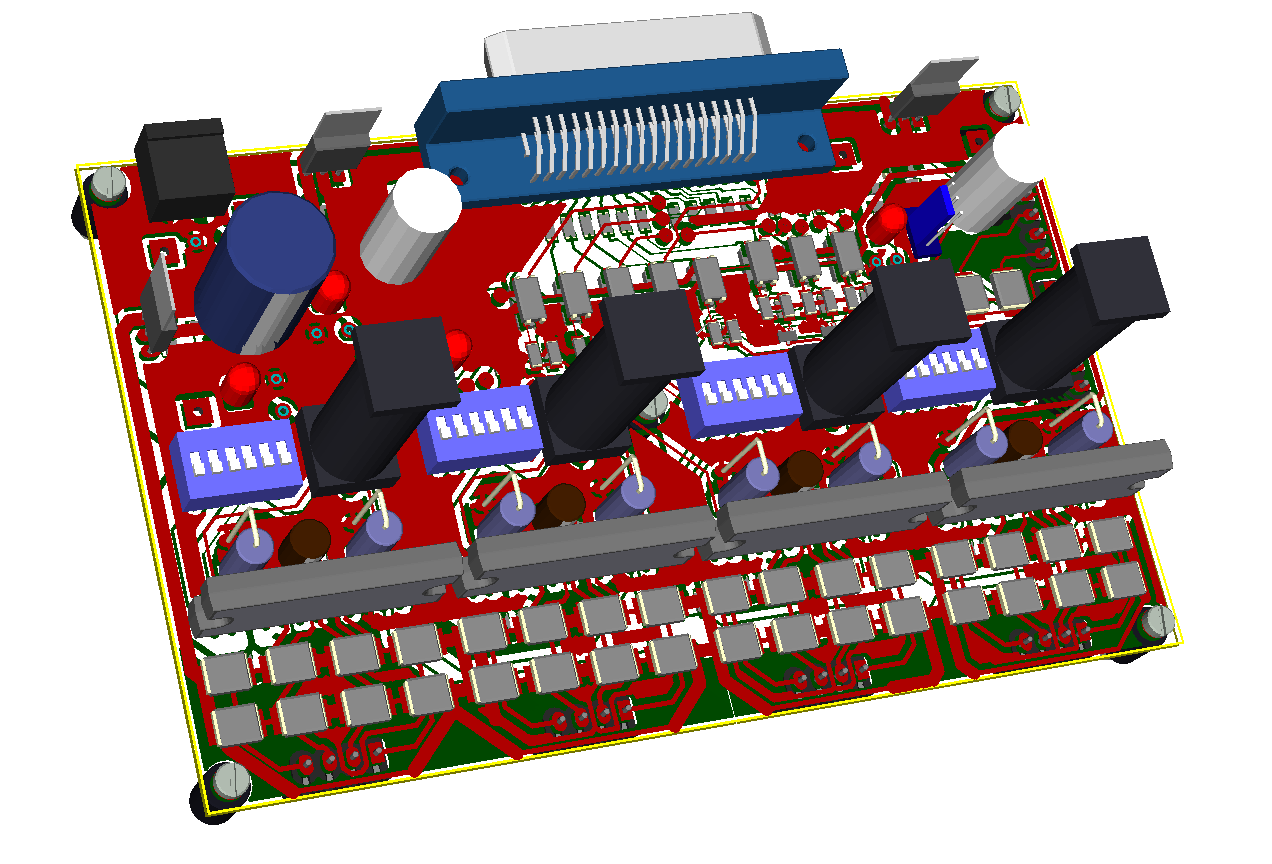
top.JPG
280 KB -

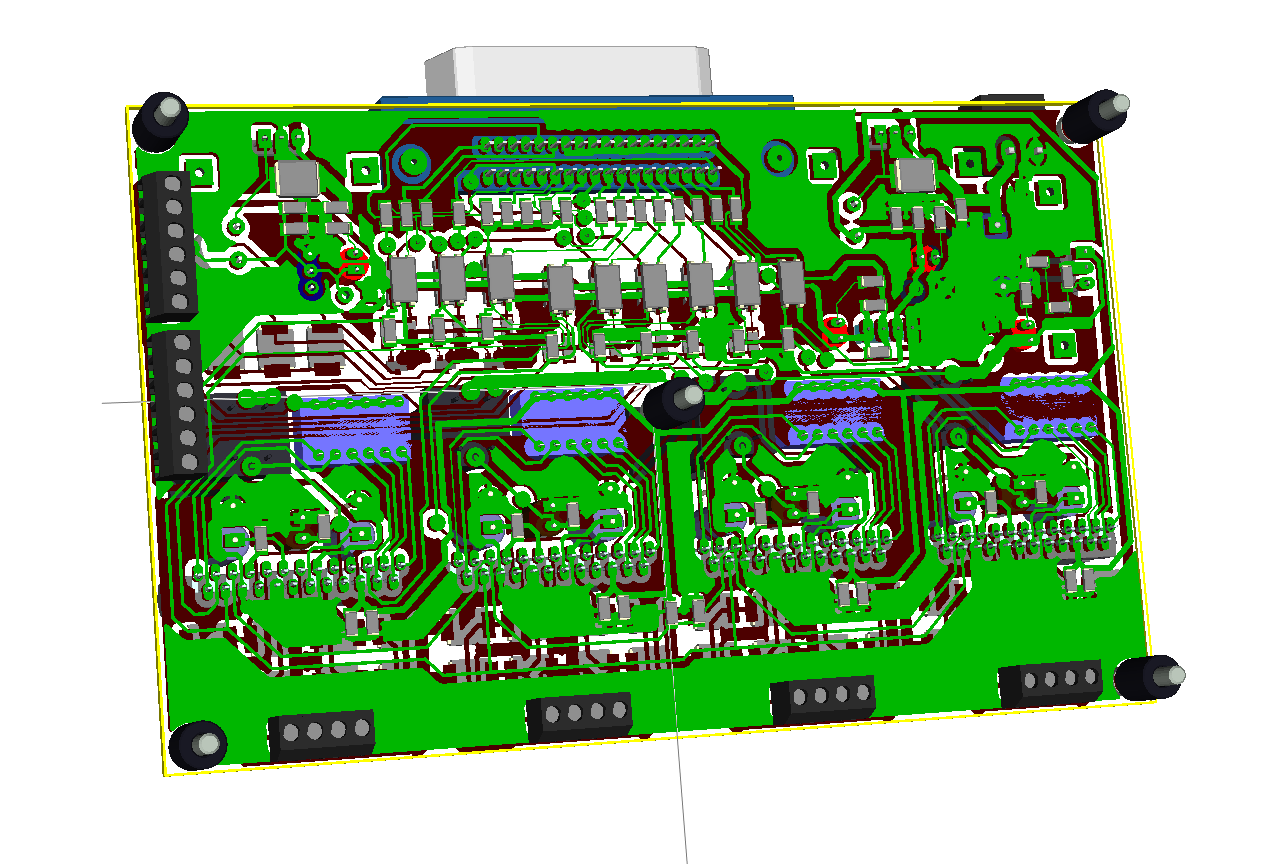
bottom.JPG
230 KB
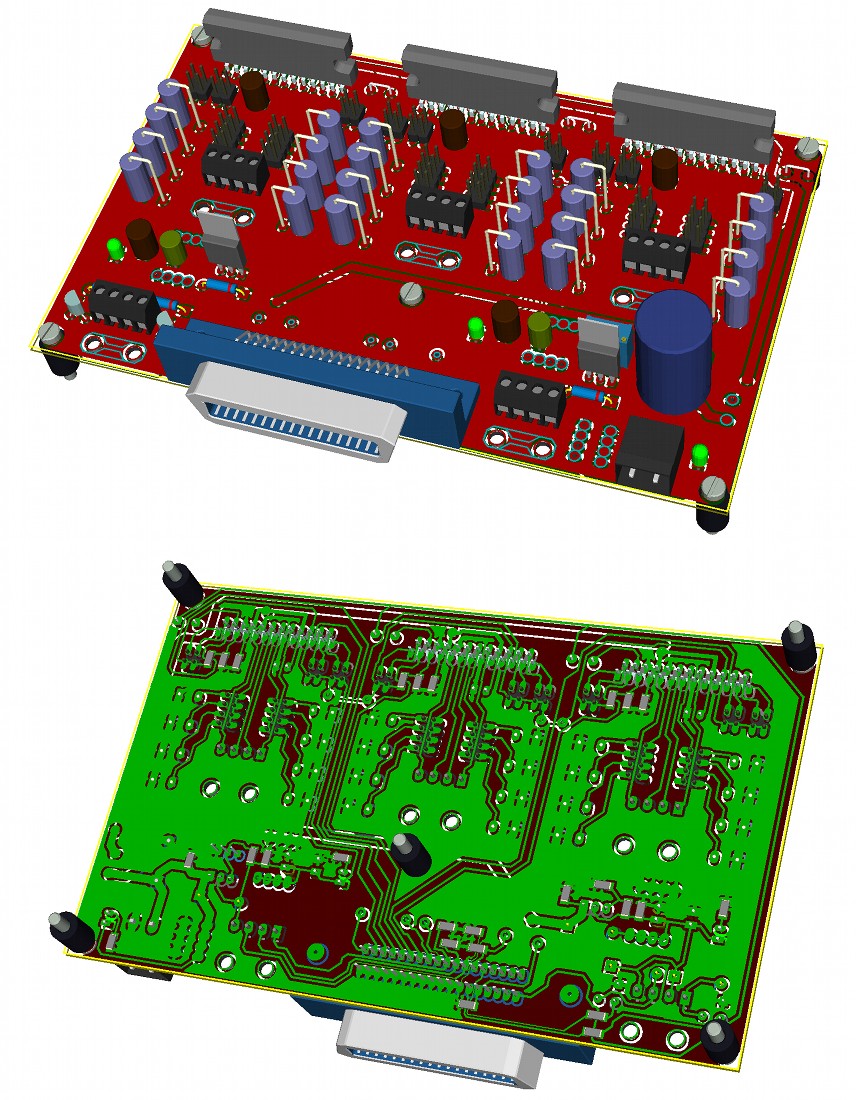

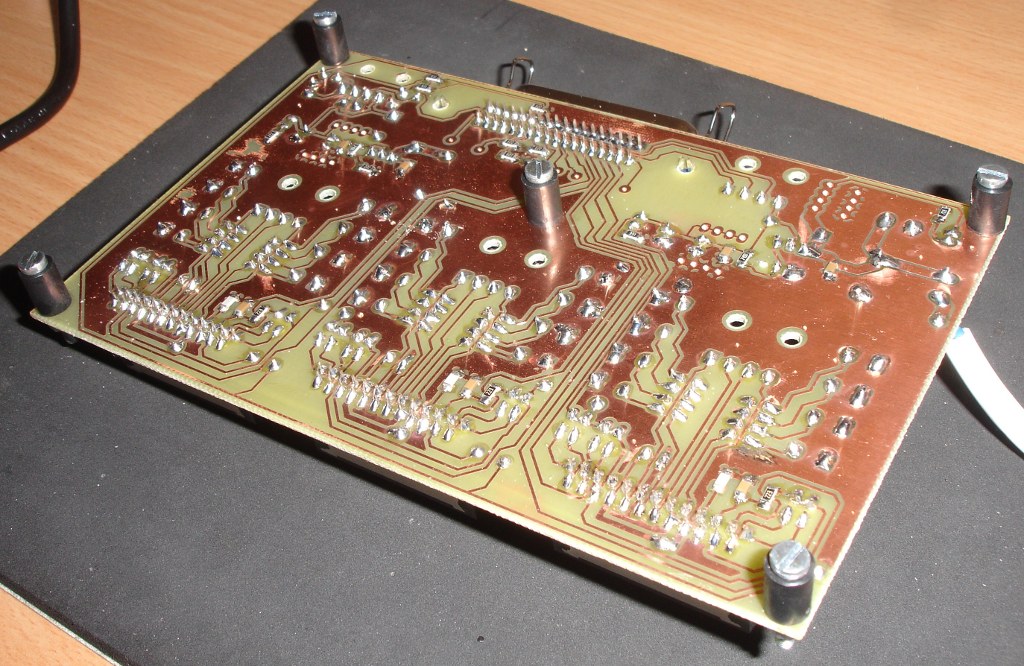
Eine Frage hätte ich noch, welcher MOSFET eignet sich für diese Aufgabe? Und zur Entspannung mal die Platine mit KiCad gerendert und zum Vergleich das momentane reale Gegenstück.
> Als Stromversorgung nutze ich im Moment ein altes > Laptop-Netzteil mit 19Volt und 3.5A. Solange ich nicht alle Achsen > gleichzeitig mit voller Leistung nutze, dürfte das für meine kleinen > Motoren reichen. Im Prinzip schon, die meisten Motoren brauchen ja keine 19V, sondern nur ein paar Volt (so 2.4) und werden absichtlich mit Überspannung betrieben, damit der Strom schneller steigt und die Drehzahl höher wird. Da dann aber bei erreichen des Stroms entsprechend lange wieder abgeschaltet wird, ist die mittlere Stromaufnahme nicht die vollen 3A (oder was du auch immer einstellst). Es geht nur um die Leistung (sagen wir ein 2.4V/2.5A Motor braucht mit seinen 2 Spulen bei Mikroschritt 8.5 Watt, zieht aus den 19V also nur 0.45A (12W bei Vollschritt). Zusätzlich wird der TB6560 mit Shunt und Dioden auch ein paar Watt verheizen. Allerdings muss der Elko auf dem Board diesen Strom auch puffern und ausgleichen können, also 3.5A Ripplestrom aushalten. Das kann deiner nicht :-( > Gibt es eine besser Wahl für die Dioden? Die taugt schon, ist schnell genug, besser wären lediglich Schottky-Dioden wie SB360 oder so wegen niedrigerem Spannungsabfall. > Ich würde tatsächlich gerne ein paar solcher Kurvenverläufe sehen wollen. Leider ist es kein Digitalscope. > Und, was ist denn eine sinnvolle Schaltfrequenz für meine Schaltung Du hast eine ca. 7cm grosse Schleife zu den Strom-Shunts, da sind 400kHz mit 3A ein Klasse Mittelwellensender. Ich schlag 330pF vor. > Eine Frage hätte ich noch, welcher MOSFET eignet sich für diese Aufgabe? Ein PMOSFET mit ausreichend niedrigem RDSon, so dass bei 3.5A keine Kühlprobleme auftreten.
moin moin, zu den "Ausgangsdioden": dreh mal den Motor ohne Schaltung und messe dabei Strom/Spannung, da kommt was! Den Fall "Motor wird gedreht" wird vorkommen, eventuell nur durch Unachtsamkeit oder weils beim Testen mal schnell gehen muss. Die Platine für den TB6560 ist wie ein Schaltregler zu gestalten. Meine Leitung zu den Shunts ist ca. 3mm, die Oberseite ist fast nur GND. Die gesamte Platine ist 56x62mm. ... Im DB ist keine Angabe zur Sperrspannung MO zu finden, ein OpenDrain kann jedoch durchaus bis 30V "aushalten". Vergleiche 7403(5V) und 7406(30V) oder HochVoltMOS mit 27V. Mit Gruß Pieter
Angehängte Dateien:
-

microstep4axis.png
150 KB
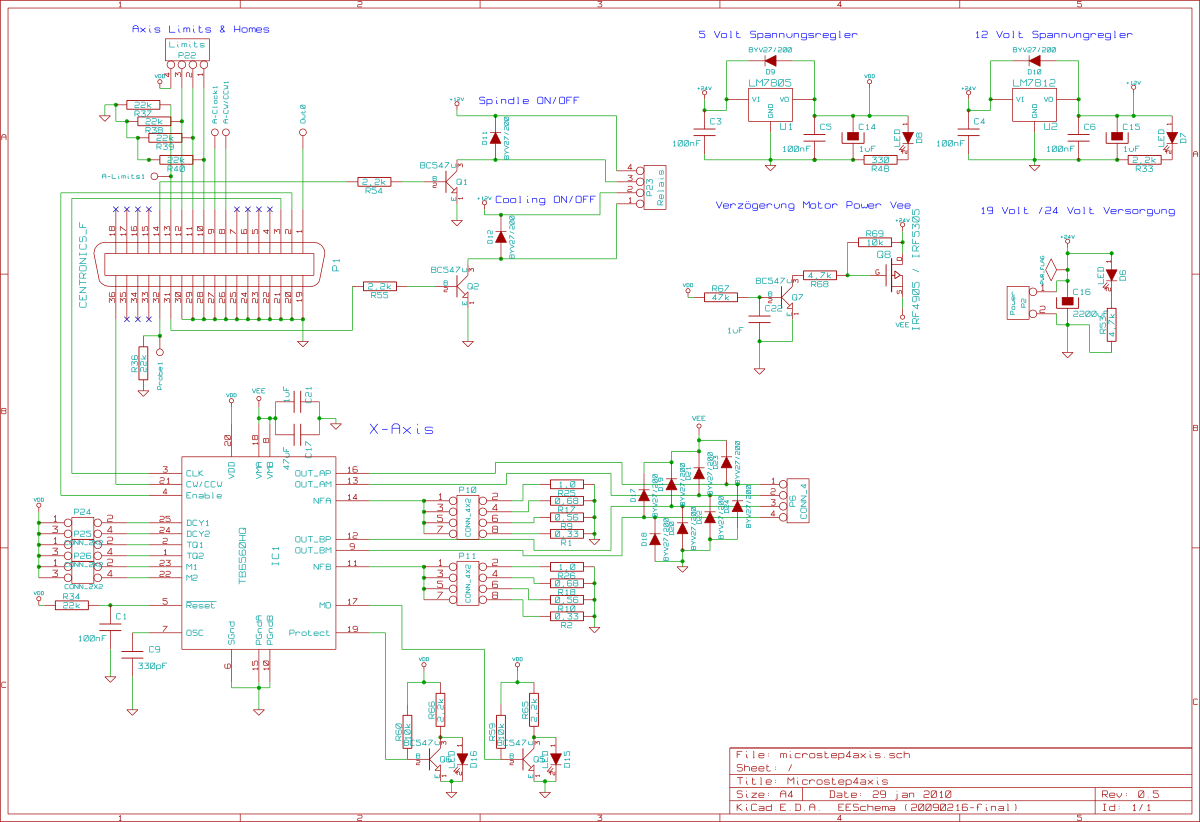
Guten Morgen, mangels Zeit gibt es erst jetzt ein Update... Ich habe folgende Änderungen vorgenommen: - auf eine Achse reduziert, um Änderungen und Kontrollen zu vereinfachen ( wenn alles ok, werden die anderen beiden Achsen einfach kopiert) - Vorwiderstände angepasst - Festspannungsregler benutzt, aber Dioden beibehalten, auf zwei mehr oder weniger kommt es nicht an - die Kondensatoren nach den Reglern entfernt - Kondensatorwert für Schwingkreis auf 330pF erhöht, um HF-Effekte zu reduzieren - 1µF Kondensator am TB6550 hinzugefügt - Schutzdioden an den Motorausgängen hinzugefügt - automatische Verzögerungsschaltung für Motorversorgung eingefügt - Optokoppler kommen später als Extramodul zwischen Schaltung und PC Könnte vielleicht jemand sagen, ob die Verzögerungsschaltung so funktionieren kann? Oder steuert der NPN zu schnell durch und danach sinkt sein Widerstand weiter? Die BE-Strecke steuert doch erst durch wenn mindestens 0,7 Volt erreicht sind und ab da ist der Steuerstrom entscheidend?
Angehängte Dateien:
-

microstep4axis_schema.png
540 KB -

microstep4axis_ls_bs.png
48 KB -

microstep4axis_oben.png
120 KB -

microstep4axis_unten.png
130 KB -

DSC02623.JPG
180 KB
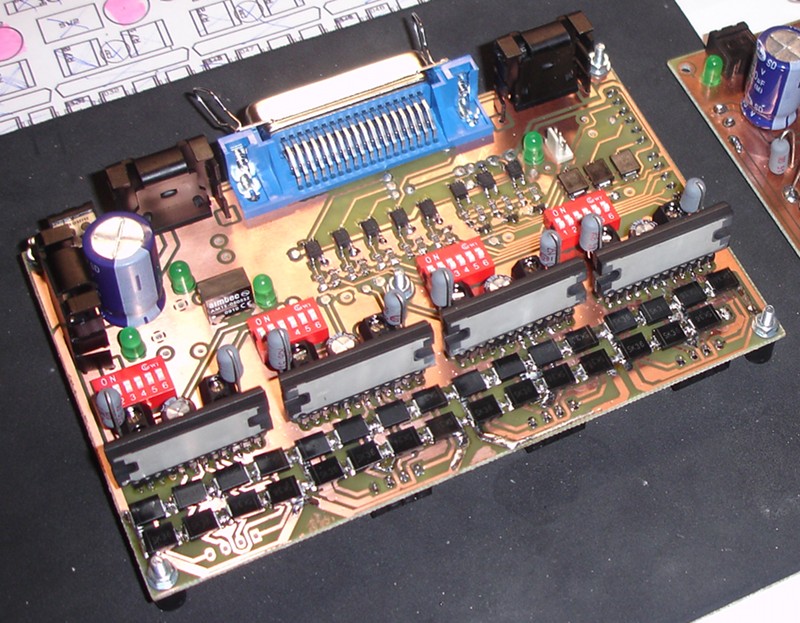
Hi, ich habe den ganzen Plan überarbeitet: - 4 Schrittmotor-Kanäle - 4 Limit- und Home-Switch-Eingänge - 1 Eingang für Werkzeuglängensensor oder Not-Aus - 3 Relaisausgänge - Galvanische Trennung für Ein- und Ausgänge per Optokoppler und DC-DC Wandler - Schutzdiode (Schottky MBRS360) an den Motoren-Ausgängen - Reset und Stromversorgung für Leistungsteil werden Zeit versetzt eingeschaltet - Vorwiegend SMD Bauteile - Wege auf PCB so kurz wie möglich Die Teile für Optokoppler und Zeitschaltung habe ich auf Steckbrett ausgetestet. Ich habe den LTV357T als Optokoppler verwendet, da die Geschwindigkeit mit den gewählten Widerständen für 15kHz laut Datenblatt ausreichen müsste. Grüße.
moin moin, wie soll die Ansteuerung von Q8 über 2 Cs funktionieren? MfG Pieter
Hallo Pieter, der P-Mosfet arbeitet spannungsgesteuert. Wenn die Spannungsdifferenz zwischen D und G größer als etwa 5 Volt wird, fängt der MOSFET an, zwischen D und S zu leiten bzw. seinen Widerstand zu reduzieren. Bei ca. 10 Volt ist er auf jeden Fall voll durchgesteuert und hat einen sehr geringen Innenwiderstand, ich glaube es waren 20 Milliohm bei diesem Typ. Im Gegensatz zu Transistoren, wo ein Basisstrom fließen muss, benötigt das Gate beim MOSFET nur eine Spannungsdifferenz zum Drain. Die beiden Kondensatoren und der Widerstand sind in Reihe zwischen zwischen Spannung und Masse geschaltet. Wenn der Strom eingeschaltet wird, liegen im ersten Moment die 24 Volt am Widerstand an und Null bei den Kondensatoren, es fließt ein Strom und die Kondensatoren werden aufgeladen. Dabei wird ihr Widerstand größer und an ihnen fällt eine Spannung ab. Gegen Ende des Ladevorganges haben beiden Kondensatoren einen quasi unendlichen Widerstand und jeweils einen Spannungsabfall von 12 Volt. Und die Spannungsteilung ist notwendig, damit die Gate-Drain-Spannungsdifferenz nicht größer als 20 Volt wird. Somit würde das ganze für Eingangsspannungen von 20 und 40 Volt funktionieren. Die Profis können es sicher noch besser erklären, das ist das was ich die letzten Tage zum Thema MOSFET gelernt habe. Ich habe diesen Schaltungsteil auf einem Steckbrett getestet, weil ich vorher noch nie mit MOSFETs gearbeitet habe und es funktioniert tatsächlich. Bei genügend großen Kondenstoren und Widerstand kann man die Einschaltverzögerung sogar sehen. Grüße, Michael.
moin moin, Profis werden eine solche Schaltung nicht benutzen. Was passiert bei einem kurzen Spannungseinbruch? Was ist, wenn die Cs durch Alterung unterschiedliche Leckströme haben oder die Platine z.B. Staubablagerung unterschiedliche Isolationswiderstände bekommt? Wunder Dich also nicht, wenn nach einiger Zeit diese Schaltung nicht mehr das tut, was Du Dir wünscht. MfG Pieter
Gut zu wissen, dann weiß ich ja schon mal, wo ich im Fehlerfall suchen muss. Und damit ich auch was lernen kann: Was würden denn die Profis für eine einfache und sichere Schaltung vorschlagen? Und was passiert bei einem kurzen Spannungseinbruch? MbG, Michael
moin moin, im Anhang ist die Schaltungssimulation für die verzögerte 24V Einschaltung. Auch bei den Optokopplern würde ich es anders realisieren. Die Simulation arbeitet mit LTSpiceIV. Mit Gruß Pieter
Mehrfachen Dank Pieter, Zum Einen, für die verbesserte Ansteuerung des P-MOSFET. Sie ist spannungsmäßig viel flexibler und funktioniert auch auf lange Sicht mit gealterten Bauteilen. Zweitens, deine Version für die Ansteuerung für den Optokoppler gibt echt schöne Flanken und damit auch genaueres Timing. Ich dachte immer ein invertierender Transistor kehrt nur das Signal um, aber er macht die Flanken steiler. Und drittens der Programmtipp. Ich arbeite zwar unter Linux. Mit Wine läuft es aber auch dort sehr gut. Werde das Programm jetzt sicher öfter mal zur Hilfe nehmen. Da bekomme ich auch ohne Oszi eine Idee, was bei einer Schaltung passiert. Da ich noch ein Platine bauen werde, werde ich dort deine Vorschläge integrieren. Ich habe die Schaltung jetzt getestet und sie arbeitet erstmal zufriedenstellend. Hier ein kleines Video des Tests: http://www.youtube.com/watch?v=dJIA00MJDjs Grüße, Michael
moin Michael,
>>er macht die Flanken steiler
jein. Die CB-Strecke ein Fototransis hat auch eine Kapazität. Die
Schaltzeit hängt vom Stromfluß und notwendigem Spannungshub ab. Bei
"Deiner" Schaltung ist der notwendige Hub > 2,5V, bei "meiner" Schaltung
ist dieser Hub < 0,6V. Läst man die e-Funktion aussen vor, ist meine
Schaltung bei gleichem Strom durch den FT mindestens 4 mal schneller.
Der Vorteil einer Simulation ist doch, auch wenn man nicht genug
Hintergrundwissen hat, man kann eine Schaltung in gewünschten Bahnen
bringen.
Für den TB6560 könnte man für den Vollschrittbetrieb auch eine
Simulation erzeugen und z.B. den Stromrippel auf 34V sehen.
"Spiel" ruhig erstmal die gesamte Schaltung durch.
MfG
Pieter
Michael Schildt, Would you share the PCB layout? Thank You Jeff... jalessi@aol.com
Hello, sure i share. Attached is an archieve of the project. It should contain all neccesary data. By the way, version 2010-04-06 is out for KiCad. Some remarks to the design: - when building the pcb on your own, you need to take care for the through connection and some parts needs to be soldered on both sides (some pins on IC1-4, all pins on U1,U2 and Q8) - the circuit works well with my Dell D600 Parallel port, but not with the parallel port from the docking station, may be due to difference in voltage, probably the hints of Pieter could help to solve this issue - when the steppers hold, they make minimal buzzing sounds, but much less than in the first version - i used the circuit for some hours with this device (http://www.cncecke.de/forum/showthread.php?t=51061) now and already cut some wooden parts, the stepper are working smoothly - and finally, i give no waranties in any way, since i'm an amateur in this field Ciao, Michael
Hallo Michael Bei aufmachen der Schaltung kommt Meldung "Bibliothek </usr/share/kicad/library/my_common_parts.lib> nicht gefunden." Kannst du auch dieser *.lib und *.mod da raus legen? Gruß Jakob
Hier ein Archiv mit hoffentlich allen nötigen Bibliotheken. Da sind auch die 3D Darstellungen bei. Wenn noch etwas fehlen sollte, dürfte es auch auf http://per.launay.free.fr/kicad/kicad_php/composant.php oder einem der Links zu finden sein. Ich habe meinen Rechner zwischen durch neu aufgesetzt und benutze auch nur die zusätzlichen Bibliotheken aus dem Archiv.
Angehängte Dateien:
-

DSC03076.JPG
170 KB -

DSC03077.JPG
170 KB -

DSC03082.JPG
150 KB -

DSC03086.JPG
140 KB
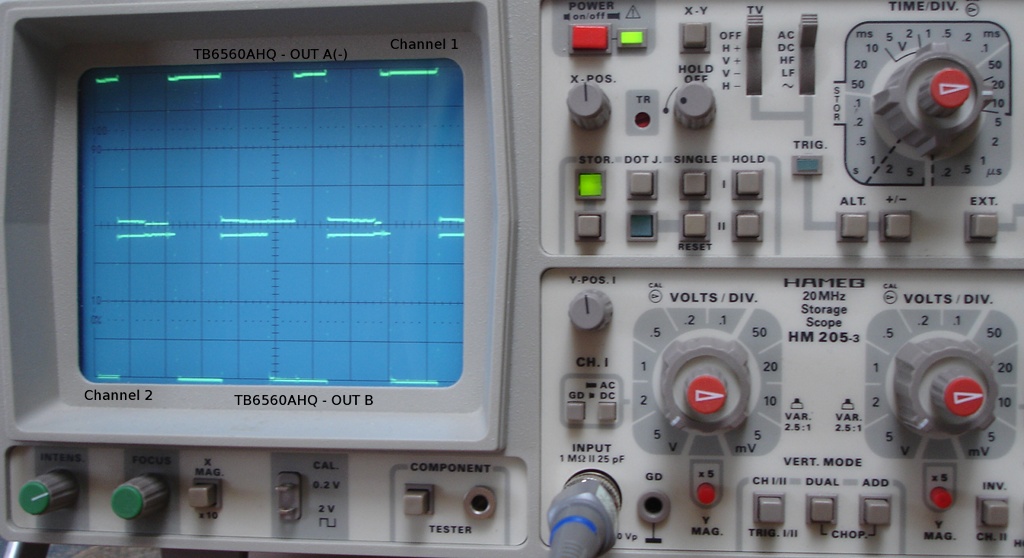
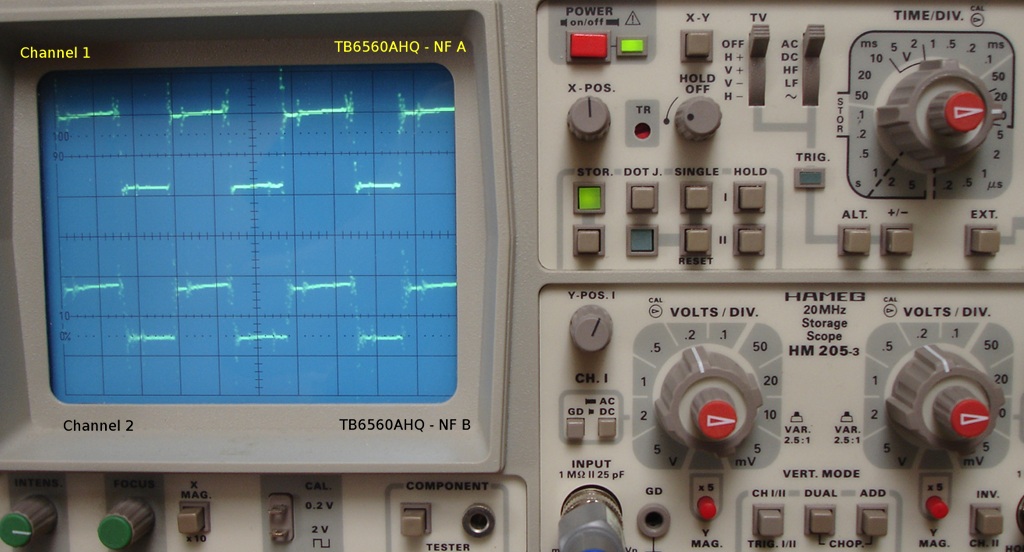
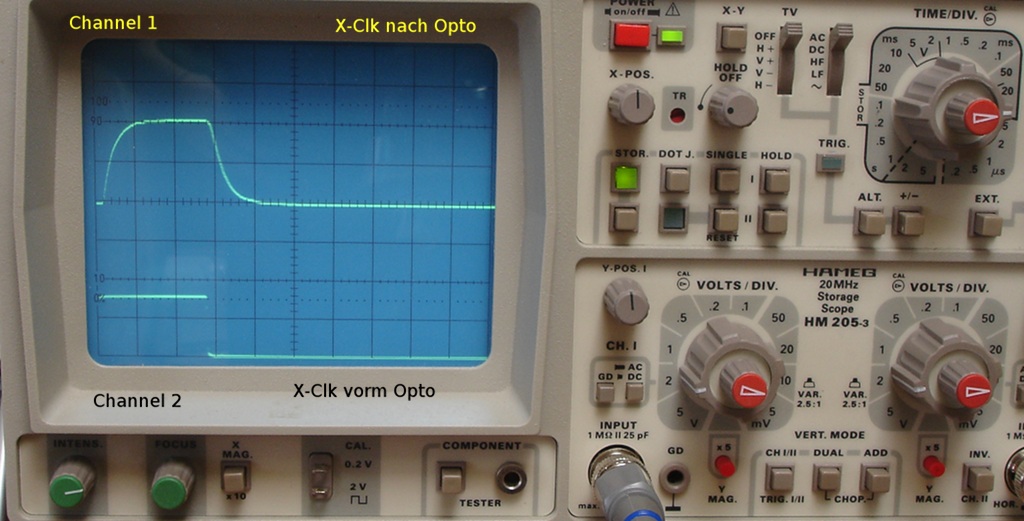
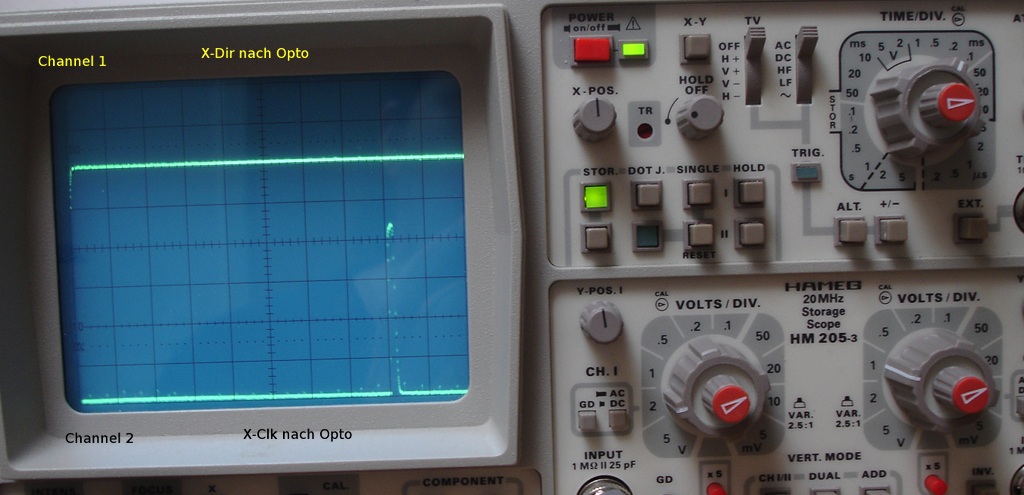
Nabend, ich habe jetzt schon das eine oder andere Teil gebohrt und gefräst. Beim Bohren sind die Löcher dort wo sie laut Programm sein sollen. Beim Fräsen gibt es auf der x Achse einige verlorene Schritte. Wenn ich die Motoren eine Weile beobachte, sehe ich sie hin und wieder kurz rucken. Deshalb habe ich die Schaltung nochmal mit einem Oszi unter die Lupe genommen. Aber keine Störungen oder schwachen Signale gefunden (man man mal von den Überschwingern an den Shunts absieht). Das Signal nach den Optokopplern sieht auch ausreichend gut aus. Die Bilder sind anbei, da sie vielleicht den einen oder anderen interessieren könnten. - Bild 1 zeigt die Spannung an den beiden Phasen eines Schrittmotors - Bild 2 Spannungsverlauf an den beiden Shunts für den TB6560 - Bild 3 Spannungsverlauf für Taktsignal vor und nach Optokoppler - Bild 4 Richtungs und Taktsignal der X-Achse nach den Optokopplern Ich habe mittlerweile Motoren und Achsen durch getauscht, aber das Problem bleibt. Mittlerweile habe ich den Laptop in Verdacht, da ich die Stockungen provozieren kann, wenn ich den Laptop in Ruhe lasse und dann mal wieder die Maus bewege, stockt es. Kann sein, dass er EMC2 nicht gewachsen ist. Wenn man mit dem Oszi mehrere Takte aufzeichnet, kann man recht deutlich den zeitlichen Jitter erkennen. Werde deshalb mal einen AVR an ein Centronicskabel basteln und damit die Takte generieren lassen. Wenn es dann nicht mehr stockt, liegt es wohl nicht an Karte. Oder weiß jemand noch andere Verdächtige für so einen Fall? Grüße.
moin moin, na EMC läuft auf einem PC, Multitasting, wenn alles in Ruhe ist wirds mit den Taktzeiten für die Schrittmotore hinkommen. Das Maustasting wird zwar kurz sein, reicht aber um den Schrittmotor ausser Takt zubringen. Zum Test mal die Schrittgeschwindigkeit auf absolutes minimum einstellen, dann solte die Maus keinen Einfluss haben. Bei meiner Steuerung gehe ich daher einen anderen Weg. Vom PC werden G-Codedaten per RS232 an einen MC gesendet, dieser speichert die Daten in einem seriellen EEPROM ab. Danach wird der G-Codeinterpreter im MC gestartet und der MC steuert die Schrittmotore. Meine TB6560Ahq betreibe ich ohne Kühlkörper, nach 1Stunde sind die bei 2A Phasenstrom so bei 55°C. Mit Gruß Pieter
> Vom PC werden G-Codedaten per RS232 an einen MC gesendet, > Danach wird der G-Codeinterpreter im MC gestartet und der > MC steuert die Schrittmotore. Das klingt wie eine gute Lösung, der uC könnte/sollte die Geschwindigkeitsrampen besser machen als ein PC. Aber was musst du implementieren, Kreisbögen ? Welche Software erlaubt überhaupt die Steuerung per G-Code über die serielle ? > Meine TB6560Ahq betreibe ich ohne Kühlkörper, nach 1Stunde > sind die bei 2A Phasenstrom so bei 55°C. Da hätte es natürlich auch ein L298 getan.
moin moin, z.B Eagle kann Daten als RS274 ausgeben, das sind fast richtige G-Codedaten, minimale Nacharbeit. Kreise/Bögen/Linien sind trivial, freude macht erst die Fräsradienkorrektur. Derzeit habe ich ca. 25 Befehle implementiert Im übrigen, EMC sollte auch nur G-Code können. Der L298 macht aber keine Microschritte. Mit Gruß Pieter
Pieter, das klingt sehr interessant. Gibt es dazu auch mehr Infos irgendwo? Ich hatte auch zuerst über MC nachgedacht, weil ein MC für Echtzeit immer eine gute Wahl ist und ein PC sich da ganz schön schwer tut. Allerdings ist EMC2 auch recht mächtig und ich wollte die Manpower die dort drin steckt gern nutzen. Mein Traum wäre eine Kombination von MC und EMC2. Der Echtzeitteil läuft auf dem MC und Die Daten werden von EMC2 geliefert, empfangen und dargestellt. Ich habe auch schon mal in die Dokumente von EMC geschaut, aber das ist wohl kein triviales Projekt. Grüße, Michael
Angehängte Dateien:
-

FM_Motor.PNG
890 KB
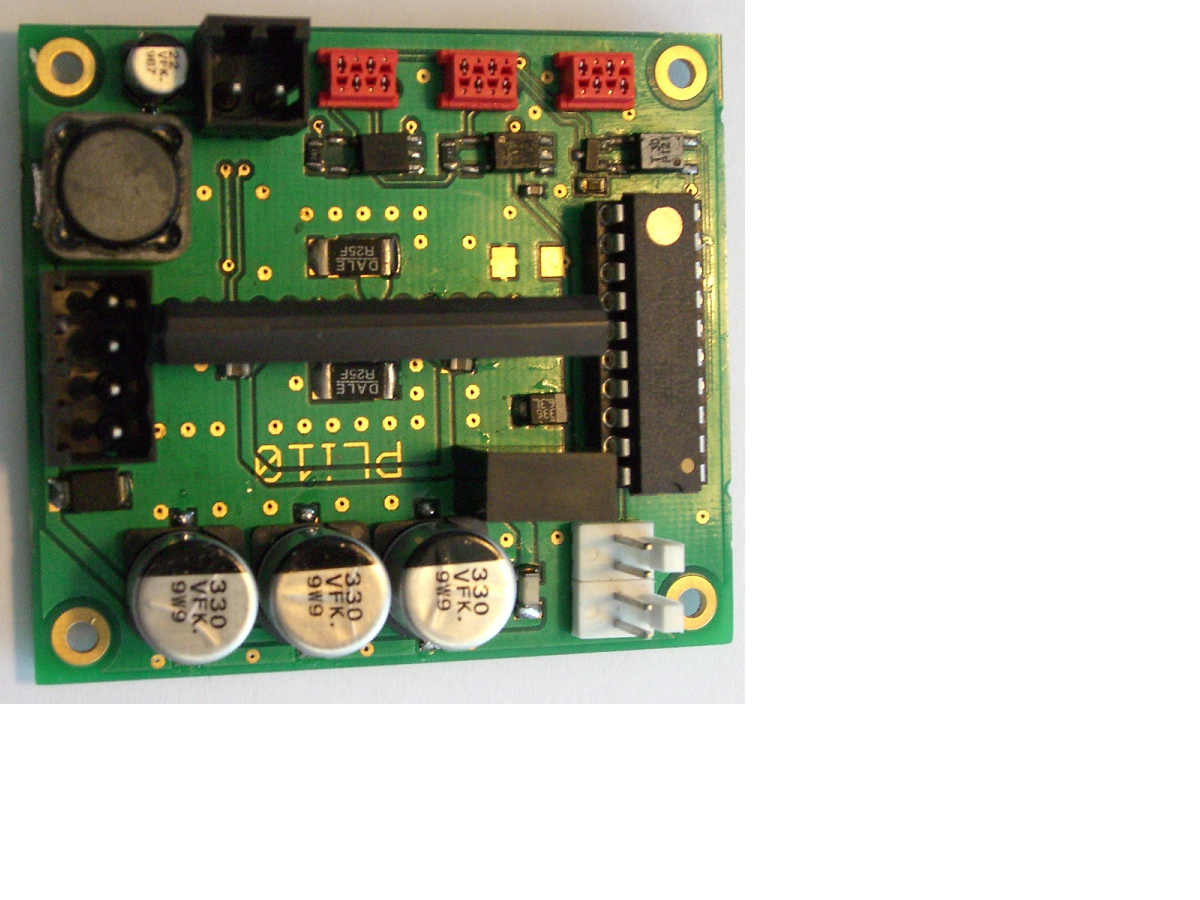
moin moin, wenn man in EMC reinpicken will, könnte das gehen. EMC berechnet die Eckdaten und ein MC macht die Feinarbeit. War mir jedoch zu aufwendig, daher alles selber geschrieben, hat ca. ein halbes Jahr gedauert. Anbei ein Bild von meiner Motorsteuerung mit TB6560AHQ und AT89LP4052 als lokaler Steuerrechner. Mit Gruß Pieter
> Anbei ein Bild von meiner Motorsteuerung mit TB6560AHQ und AT89LP4052 > als lokaler Steuerrechner. Ein Motor, also keine Kreise. Der DALE hat über 1W ? (ich hab hier 4 x 2512 1R) Du schaltest Vm erst nach Vcc an ? Erstaunlich, was der kleine 4052 alles kann.
moin moin, der Motortreiber sitzt bei mir immer direkt am Motor. Der lokale MC realisiert die Einschaltreihenfolge der Motore und dann die (otisch getrennte) SPI Umsetzung der Signale. SPI in: Steuersignale, SPI out: Endlagen/Referenzpunkt. >>Der DALE hat über 1W ? Die DALE: von Mouser laut Bestellung 71-WSL2512-0.25/R Vishay/Dale SMD Power Metal Strip/Current Sensing Resistors 1watt 0.25ohms 1% ECCN:EAR99 1Watt ist zugegeben eng. ABER beidseitige große Masseflächen das sollte reichen und eine Leistungsreduzierung ist erst ab 70°C notwendig. >>Du schaltest Vm erst nach Vcc an ? Der DC/DC Wandler arbeitet im Anstieg linear. Das Datenblatt des TB6560AHQ ist hierzu auch widersprüchlich: 1. VMA/B => VDD 2. Turn on VDD. When the voltage has stabilized, turn on VMA/B. Beim einschalten bleiben Enable und Reset auf L, damit sollte der Leistungsteil inaktiv sein. Mit Gruß Pieter
Ein schöner dezentraler Ansatz. Kurzer Weg zum Motor hat seine Vorteile. 25 Befehle ist schon eine ordentliche Anzahl. Lässt du die Achsen gleichzeitig arbeiten beim Fräsen, inklusive Beschleunigung? Das mit EMC2 werde ich mir noch mal genauer anschauen, muss halt nur mal Zeit sein für ... Gestern habe ich wieder ein paar Links zum Thema CNC und MC gefunden: - ReplicatorG a simple, open source machine controller - http://replicat.org/ - Wiki zum Thema MC kontrollierte Maschinen http://www.reprap.org/wiki/DocumentationMain - nicht mehr neu, aber eine Ausgangsbasis http://sourceforge.net/projects/avrcnc/ Überhaupt quellt das Netz über vor angefangenen Projekten rund um CNC. Das Meiste sind schöne Ideen, aber eben nicht zu Ende gebracht. Da möchte ich nicht noch ein Projekt hinzufügen. Hier macht allein kämpfen aus meiner Sicht keinen Sinn, auch wenn es sehr interessant ist. Grüße, Michael
Der Traum von einer Kombination aus EMC und AVR wird vermutlich ein Traum bleiben. "EMC is a smart controller and uses dump hardware" http://www.linuxcnc.org/component/option,com_kunena/Itemid,20/func,view/catid,27/id,2618/lang,en/ http://www.linuxcnc.org/component/option,com_kunena/Itemid,20/func,view/catid,27/id,2395/lang,en/ Wäre auch zu schön gewesen ...
Angehängte Dateien:
-

Blockbild.gif
17 KB
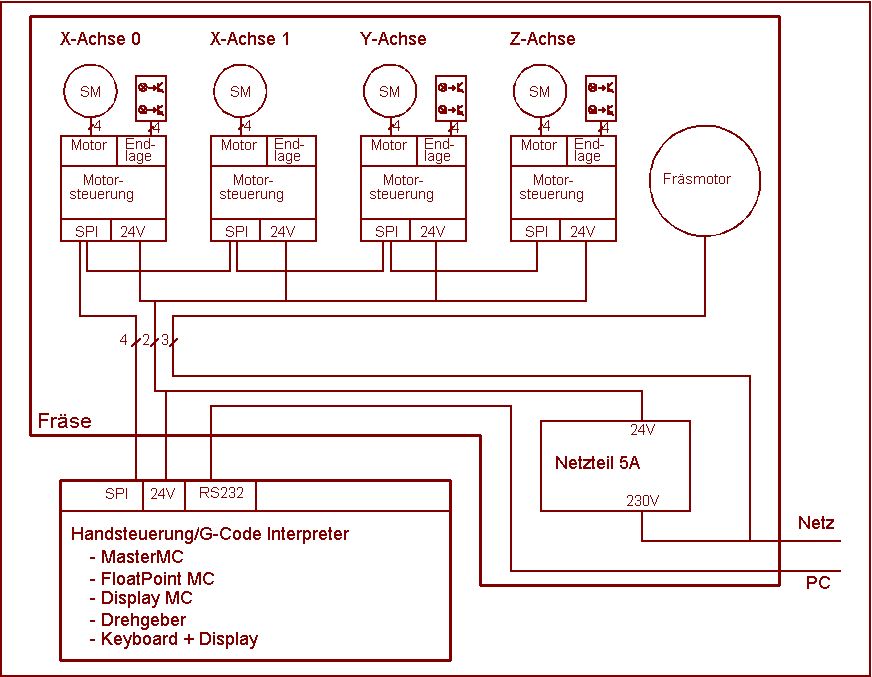
moin moin, anbei ein Blockschaltbild meiner Fräsensteuerung. Möchte aber bitte kein "maulen" hören, weil ich 7 MCs einsetze. Bei den geringen Preisen ist es einfacher die Aufgaben auf mehere MCs zu verteilen und dann einfacher zu proggen. Mit Gruß Peter
@Pieter ... und es ist auch einfacher bestimmte Komponenten zu erweitern oder zu ersetzen ... Hast du zufällig Bilder von deiner Anlage, Handsteuerung bzw. Controller? Bin da schon neugierig jetzt. Ich habe mich heute mal wieder mit EMC und dessen Latenz-Test beschäftigt und bin zu dem traurigen Ergebnis gekommen, das der Laptop eine schlechte Wahl war. (So sind im EMC Wiki wenigstens ein paar Testergebnisse hinzugekommen http://wiki.linuxcnc.org/emcinfo.pl?Latency-Test): Thread-Jitter von 707137 ns / 78715 ns, somit unbrauchbar. :( Dann habe ich noch zwei andere PCs getestet und die sind um Größenordnungen besser: ASRock K10N78FullHD?-hSLI R3.0 mit Athlon 64 X2 6000+ and NVidia 9800GTX+ Jitter 6811 ns / 15513 ns. Als Zweites: GA-MA785GM-UD2H mit Athlon Dual Core 4850e and Onboardgrafik hatte Jitter von 9141 ns / 9757 ns. Dann hatte ich kurz noch ein i7 System in der Hand, aber da war der Jitter schlechter als beim Dell, da habe ich die Werte gar nicht mehr notiert. Da werde ich wohl umdisponieren müssen. Aber zumindest (ziemlich wahrscheinlich) den Störenfried gefunden.
Angehängte Dateien:
-

Fraese_Mainboard.JPG
110 KB
{kind=link}
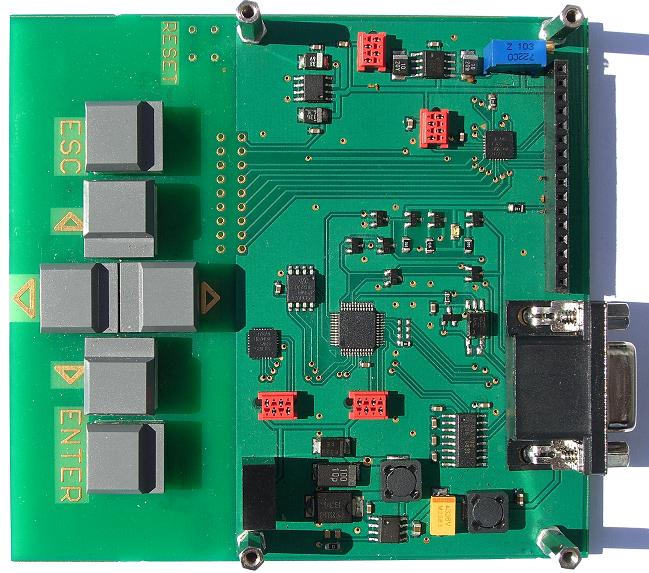
moin moin, @Michael, anbei ein Foto vom Testaufbau der (Hand-)Steuerung. Diese Platine und die obigen Motorsteuerungen sind alles was ich für die Fräse brauche. Auf die Stehbolzen kommt noch das 4x20 LCD-Display rauf...nur sieht man dann nichts mehr von der Schaltung;-) Bitte zur Beachtung : Ich bin 8051-Fan und arbeite nur unter Win. Mit Gruß Pieter
@ Pieter danke fürs Bild, sieht gut aus und relativ klein. Mir stellt sich aber sofort die Frage, wie steuerst du 3 bzw. 4 Achsen mit einem Steuerkreuz? Und diese roten Kontaktbuchsen, die mir schon auf deiner Motorsteuerung aufgefallen sind, was sind das für welche? Haben sie Vor- bzw. Nachteile gegenüber anderen Verbindungen? Viele Grüße
moin moin, @Michael, mit dem Steuerkreuz bewege ich mich in einem Menü, gesteuert wird immer nur eine Achse mit einem Drehgeber. Macht jedoch nicht so schöne Fräßbilder wie eine programmierte Bahn. Die Handsteuerung benutze ich oft nur zum positionieren. Die roten Steckverbinder sind schön klein, gibt es z.B. bei http://www.reichelt.de/?;ACTION=2;LA=2;GROUP=C1446;GROUPID=3228;START=0;OFFSET=16;SHOW=1;SID=26Lehv1awQARoAAHMJ6KA3aed134290f49612f98e4f759da8c5a2 Damit erfolgt die Programmierung der MCs. Die 4. Buchse ist für den Drehgeber. Die Programme für die MCs sind alle in Macroassembler geschrieben. Und den TB6560 A HQ gibts für 5€ bei Darisus: http://darisusgmbh.de/shop/advanced_search_result.php?XTCsid=19004cd1247895ddd5edba45c1d52dfe&keywords=tb6560 Mit Gruß Pieter
Danke für die Hinweise, ich denke ich werde dieses Stecksystem mal testen bei Gelegenheit. Meine TB6560AHQ auch bei Darisus bestellt. Bei ersten Mal noch bei Ebay für teuer Geld. Dein Kontroller-Software-Gespann ist ja für alle 2D und 2,5D Aufgaben gut gerüstet, sogar mit Simulation (läuft mit Emulator auch gut unter Linux). Schönes Projekt. Welchen GCode/RS274-Dialekt hast du da implementiert? Bei EMC wird RS274NGC genutzt, der macht bei G85 zum Beispiel was ganz anderes. Den Editor/Simulator kennst du bestimmt schon: http://betatechnical.com/autonc.htm. Den nutze ich hin und wieder.
moin moin, Hi Micha, hatte am WE erstmal Monitorausfall... Beim G-Code "kocht" jeder so sein eigenes Süppchen. Die Codenummer selber sind ja nur an einer Stelle codiert, da was ändern ist kein Problem. Bei den Kommandos selber gibt es auch Unterschiede und da wird es echt schwer gemeinsamkeiten zu finden. Im CNCView laufen genau die selben Funktionen wie auf dem 8051. So wird SIN/COS nicht über die FPU berechnet, sondern mit der selben Nachbildung wie in der Float-Lib des SDCC. Der wiederum macht bei vielen Sachen einen unheimlichen Overheat bei der Parameterübergabe. Durch die getrennte FPU kann ich Werte parallel berechnet, z.B: X = R * cos(a) Y = R * sin(a) Dazu wird a an die FPU gesendet, Kommand cos, aufs Ergebnis gewartet, Ergebnis abholen und Kommando sin senden. Im MainMC wird nun mit R multipliziert, abgespeichert. In der Zwischenzeit ist die Berechnung sin fast fertig und dann wird der Rest multipliziert. Beim LCD-MC ist es ähnlich. In der Initphase wird dem gesagt, wie Lang ein Step je Achse ist. Im Betrieb lauscht der LCD-MC an der Steuerleitung und addiert die Schrittlänge zur Anzeige, der MainMC arbeitet nur in Stepps. Was willst Du mit Deinen 3 Motoren ansteuern? Fräse? Mit Gruß Pieter
Hi, dem Monitor war sicherlich auch zu warm ... Ich steuere damit eine Holz-Fräse an, die existiert auch schon: http://www.cncecke.de/forum/showthread.php?t=51061 . Später will ich meine Minidrehbank auf CNC umrüsten. Dieser Umstand ist auch ein Grund warum ich EMC2 nutze, das kann auch Drehmaschinen ansteuern. Dafür würde ich die Karte auch nehmen, wenn sie sich weiter bewährt. Am Sonntag wollte ich EMC2 mal an einem geeigneteren PC testen, aber der hat keinen Parallelport mehr. Nun ja ... Grüße, Michael
moin moin,
Hi Micha,
>>keinen Parallelport mehr.
Das war mit ein Grund diese Steuerung so zu bauen. UART ist im MC noch
recht einfach zu proggen, USB (hat mein C8051F340 ja) ginge auch. Nur
hier wirds dann auf der PC-Seite blöde, welches Programm greift schon
auf USB zu?
Drehbank...hmmm was ist denn da so viel anders als bei einer Fäse?
Mit Gruß
Pieter
Hallo zusammen, hat jemand Platinen der microstep4axis angefertigt oder anfertigen lassen? Ich wäre an einer interessiert.
Hallo Ulrich, so wie die Schaltung im Moment ist, würde ich sie nicht fertigen. Sie funktioniert nicht mit jedem Parallelport. Ich habe sie an 4 Parallelports getestet und an Einem läuft sie problemlos. Bei Zweien gehen nur die Eingänge, jedoch die Ausgänge nicht (Home, Not-Aus u.s.w.) und beim 4. Port gingen weder Ein- noch Ausgänge. Wenn ich mich nicht vermessen habe, arbeiteten alle 4 Schnittstellen mit 3.3 Volt. Bei den nicht funktionierenden Ausgängen werden die Leitungen bei Low nur auf 0,8 Volt "runter gezogen" und das reicht eben nicht immer. Ein Pullup statt Pulldown ist hier vielleicht besser. Vielleicht hat ja jemand Zeit und Muse die Schwachpunkte zu beseitigen. Für mich funktioniert die Karte, so dass ich im Moment kein überarbeitete Version brauche. Und, es gibt fertig aufgebaute Karten mit gleicher Funktionalität bei Ebay (Suchwort TB6560) für 68 Euro inklusive Versand aus Hong Kong zzgl. Zoll. So etwa liegen auch die Materialkosten. Selbstbau lohnt nicht wirklich.
moin moin, @Michael, schau mal ins BIOS, was ist da als LPT-Mode eingestellt. Setz das mal versuchweise auf SPP und dann sollte es auf allen PCs laufen. Ist der LPT im bidirektem Modus müssen auch die Steuerregister gesetzt werden. Mit Gruß Pieter
Guten Morgen! @Pieter, ein guter Tipp. Ich habe alle Einstellungen (SPP, EPP, ECP, ECP+EPP) durch getestet. Wenn ich auf ECP oder ECP+EPP stelle arbeitet die Karte wie oben beschrieben, bei SPP oder EPP reagiert die Karte gar nicht. Warum auch immer!? Ciao, Michael
Michael Schildt schrieb: > Michael Schildt, > > Would you share the PCB layout? > > Thank You my email mirciugabriel@yahoo.com
gabriel schrieb: > Michael Schildt schrieb: >> Michael Schildt, >> >> Would you share the PCB layout? >> >> Thank You > > my email mirciugabriel@yahoo.com Please, look at the following messages of this thread with necessary files attched: Beitrag "Re: TB6560HQ wird ohne Last warm" Beitrag "Re: TB6560HQ wird ohne Last warm"
hallo Michael, habe auf Dein Anraten, bei Ebay mir eine Steuerung TB6560 3 Axis aus Hong Kong gekauft. Hat einer von Euch ein Schaltbild von dieser Steuerung. Sie läuft unter WinPC-NC ohne Probleme.
Hello, just for my information.... :) what is the reference of the DC/DC converter? nice project :) Thanks
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.