Hallo,
ich bin dabei mir einen kleinen Tacho für mein Motorrad zu bauen.
Folgender Aufbau (bis jetzt):
µC Attiny 24
Reedkontakt gegen Masse, der an den INT0 Pin des µC's geht. Zusätzlich
ein 10k gegen Vcc und ein 100nF von Pin gegen GND, interne Pullups an.
Widerstand und Kondensator dienen zum entprellen.
Der Reedkontakt löst also das INT0 aus und ich messe von 2 Flanken die
Zeit. Dabei wird bei einer fallenden Flanke eine LED eingeschaltet und
bei einer steigenden die LED wieder ausgeschaltet.
Das ganze funktioniert auch wunderbar, auch die Entprellung.
Nur, wenn der Motor des Motorrades läuft, bekomme ich (vermutlich)
dauernd irgendwelche Interrupts, da die LED blinkt, manchmal leuchtet
und nicht ausgeht, etc. Es ist willkürlich.
Drehe ich das Rad bei ausgeschaltetem Motor, bekomme ich keine
unbeabsichtigten Interrupts, sondern nur, wenn der Magnet tatsächlich am
Magnet vorbeiwandert, leuchtet auch die LED kurz auf.
Hat jemand eine Idee, woran das liegen könnte bzw. was man dagegen
machen kann?
Bevor ich keine sauberen Signale bekomme, brauche ich nicht weiter zu
machen. Ach ja, es soll eine Lösung mit Reedkontakt sein, nicht mit
Hallsensor oder ähnlichem. Das Entprellen funktioniert ja und macht auch
keine Probleme.
1
#include<stdint.h>
2
#include<avr/io.h>
3
#include<avr/interrupt.h>
4
#include<inttypes.h>
5
6
#ifndef F_CPU
7
#define F_CPU 8000000UL // processor clock frequency 8Mhz
8
#endif
9
10
#define LED PA6 // Pin für Steuerung der LED des Modus
11
12
#ifndef TRUE
13
#define TRUE 1
14
#define FALSE 0
15
#endif
16
17
18
voidinit(void);// Initialisiert die Ports, Enable global Interrupt
19
20
// Variablen in der ISR externes Interrupt 0
21
volatileuint16_tusStartTimeINT0=0;// TCNT1-Wert bei der 1.Low-Flanke speichern
22
volatileuint16_tusEndTimeINT0=0;// TCNT1-Wert bei der 2.Low-Flanke speichern
23
volatileuint8_tuchErsteFlankeINT0=TRUE;// Zu Beginn soll die erste Flanke eingelesen werden
24
volatileuint32_tulGesamtzeitINT0=65535;// Gesamtzeit in Timerzyklen des INT0 (Taktzeit inkl. Prescaler)
David schrieb:
> Hat jemand eine Idee, woran das liegen könnte bzw. was man dagegen> machen kann?
Unzureichend gesiebte Versorgungsspannung. Die Lichtmaschine deines
Motorrades bzw. sonstige Dinge im Stromkreis veranstalten ein wahres
Feuerwerk auf der Versorgungsspannung.
Was hast du denn unternommen um deinen µC vor Störungen auf der
Versorungsspannung zu schützen?
Hallo,
zunächst eine Diode 1N4007 - Spule 68µH - 100µF Elko - 100nF Kondensator
- Spannungsregler 7805 - 100nF Kondensator.
So ist meine Beschaltung, um die Spannung auf 5V zu halten.
'nabbend,
hoffentlich befindet sich das "Netzteil" direkt am Controller.
Mit den Reed-Kontakten wirst Du noch Spass bekommen:
-das sind mechanische Bauelemente und unterliegen mechanischem
Verschleiss
-mechanische Bauelemente haben eine maximale Schaltfrequenz, die
sich auf die Lebensdauer negativ auswirkt
Sind die Leitungen zum Reed-Kontakt verdrillt oder abgeschirmt?
Wenn nicht, solltest Du das DRINGEND machen. Die Leitungen wirken
prima als Antennen.
Viel Spass
Stefan
Hallo,
also ich habe testweise noch statt dem 100µF ein 470µF Kondensator
eingelötet mit gleichem Ergebnis. Auch ein 10µF nach dem Spannungsregler
zusätzlich brachte keine Änderung.
Das "Netzteil" ist ziemlich dicht am µC, was die Leiterplatte eben
zugelassen hat. Am µC selbst ist ein 100nF zwischen Vcc und GND.
Es sind normale Litze Leitungen, die ich momentan für den Reedkontakt
verwende.
Gibt es eine Möglichkeit so etwas softwaremäßig zu unterbinden?
Guten morgen,
was ich noch Ergänzen möchte bzw. wir aufgefallen ist:
Selbst wenn ich den Reed Kontakt nicht angelötetet habe an die Platine,
blinkt oder leuchtet die LED auf --> Es sind dann auch keine "Leitungen"
als Antenne vorhanden.
David schrieb:
> Selbst wenn ich den Reed Kontakt nicht angelötetet habe an die Platine,> blinkt oder leuchtet die LED auf --> Es sind dann auch keine "Leitungen"> als Antenne vorhanden.
Das unterstützt eigentlich die Theorie, dass die Störungen über die
Versorgungsspannung reinkommen.
David schrieb:
> Hallo,>> also ich habe testweise noch statt dem 100µF ein 470µF Kondensator> eingelötet mit gleichem Ergebnis.
Mach noch kleinere dazu.
Große Elkos können große Störungen auffangen, aber für kurze Spikes sind
sie zu träge.
> Gibt es eine Möglichkeit so etwas softwaremäßig zu unterbinden?
Ne. Die Versorgungsspannung muss stehen.
Du kannst an deinem Motorrad Elektronik anbringen soviel du willst. Wenn
du Dreck im Vergaser hast, wird der Motor stottern, egal was du an
Motorsteuerungselektronik mit hast.
Karl heinz Buchegger schrieb:
> Das unterstützt eigentlich die Theorie, dass die Störungen über die>> Versorgungsspannung reinkommen.
Und wie könnte man diese noch weiter entstören?
Die genannte Beschaltung habe ich schon öfter bei µC's am Motorrad
verwendet, jedoch keinen INT0 Pin genutzt. Da hat es einwandfrei
funktioniert.
Den Kontakt kann ich auch nicht pollen oder, da er letztendlich vom
Radumfang nur ein Bruchteil ausmacht und somit ist er schlecht in einer
zyklischen Abfrage zu "erwischen". Oder habe ich einen Denkfehler?
1. Mit Oszi Messen, nur dann kannst sicher was über die
Versorgungsspannung sagen.
2. Schaltplan/Bilder währen hilfreich.. evtl auch ein Foto der Schaltung
am Bike.
Wo greifst du deine Potentiale/Masse am Bike ab? Deine Störungen kommen
mit sehr großer Warscheinlichkeit von der Zündung. Die Frage ist nur..
past was mit deiner Entstörung ned, ist die Anordung allgemein ungünstig
plaziert oder ist was am Bike kaputt. (allgemeine Entstörung)
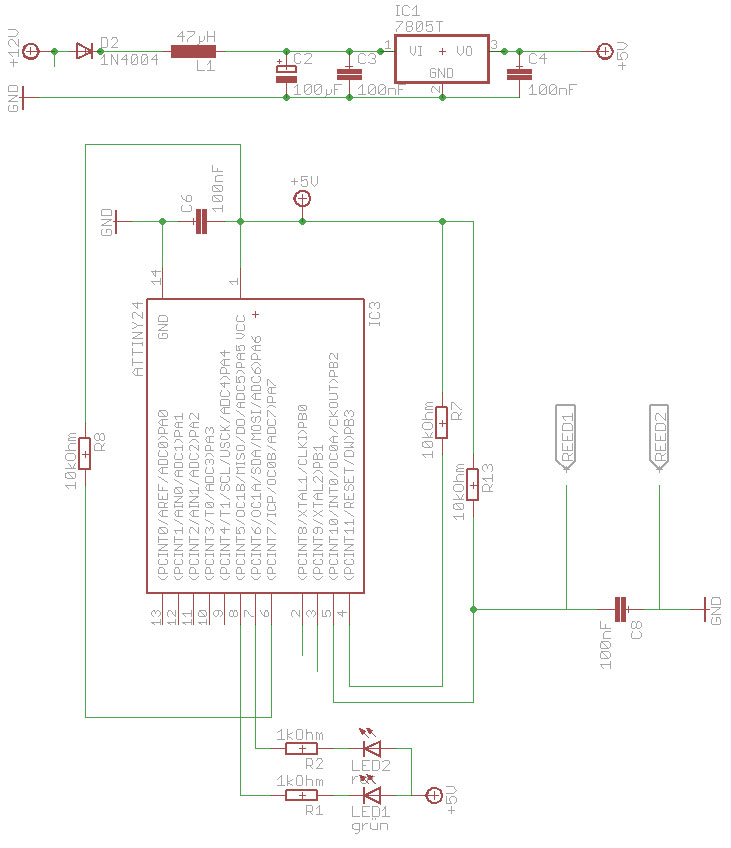
Hallo byte,
der Schaltplan ist im Anhang.
Das ganze ist auf einer Lochrasterplatine aufgebaut, aber die
Versorgungsspannung so dicht wie möglich am µC.
Ich wollte erstmal die Signalerkennung ordentlich einlesen, erst dann
mit der Auswertung und dem Display weitermachen. Jedoch ohne diese
Grundlage, ist der Rest hinfällig, daher ist der Schaltplan im Moment
nur minimal.
Ich denke als erstes sollte man mal rausfinden, was da im µC eigentlich
abläuft. Fängt sich der Pin Störungen ein oder wird der ganze µC
resettet.
Dazu würde ich vorschlagen, das Programm erst mal extrem abzuspecken :-)
1
#include<avr/io.h>
2
#include<utils/delay.h>
3
4
intmain()
5
{
6
DDRA=(1<<6)|(1<<5);
7
PORTA=0;
8
9
while(1){
10
PORTA^=1<<6;
11
_delay_ms(500);
12
PORTA&=~(1<<5);
13
}
14
}
Das würde ich mal auf den µC brennen.
Engine start und nachsehen was die LEDs machen.
LED 6 blinkt einmal / Sekunde
LED 5 geht bei Programmstart an und wird nach dem ersten Blinker
abgeschaltet
So sollte das sein.
Ist die Blinkfrequenz an LED 6 unregelmässig, bzw. leuchtet auch LED 5
sporadisch auf, dann wird der µC durch Störungen komplett ausser Tritt
gebracht und resettet sporadisch.
Das würde mir dann als Nachweis genügen, dass an der Versorgungsspannung
was getan werden muss.
Verhalten sich die LED aber wie programmiert, dann liegt das Problem bei
dem einen Eingang (oder im original Code).
Das wäre für mich jetzt erst mal das erste was ich aussortieren würde.
Reset offen? Offene "Beinchen" können bei sowas fatale Folgen haben.
Alles am besten nach Datenblatt fachgerecht festnageln (GND,
Pullup/down, was auch immer).
Hallo,
ersteinmal vielen lieben Dank, für die tolle Resonanz in dem Forum, dass
sich so viele "kostenlos" diesem Problem annehmen und helfen.
Ich bin momentan noch auf der Arbeit, während meine Schaltung zu Hause
einen auf Harz IV macht und hingegen nicht arbeitet :o)
Wenn ich zu Hause bin, werde ich von Reset nach GND noch einen 100nF
anlöten und mal das Programm von Karl Heinz aufspielen.
Das Ergebnis werde ich hier dann umgehend berichten.
byte schrieb:
> Reset offen? Offene "Beinchen" können bei sowas fatale Folgen haben.
Der Reset liegt über ein Pullup nach Vcc, also offen ist er nicht. Nur
der angesprochene Kondensator fehlt.
David schrieb:
> Wenn ich zu Hause bin, werde ich von Reset nach GND noch einen 100nF> anlöten und mal das Programm von Karl Heinz aufspielen.
Wenns dir nicht zu viel Arbeit macht, könntest du die Reihenfolge
umdrehen? Zuerst Programm ausprobieren und erst dann den C ergänzen.
Wäre interessant
* ob der µC wirklich resettet wird
* ob der C einen Unterschied macht.
Dazu musst du aber den Zustand bei unveränderter Hardware kennen.
Nichts ist so schlimm, wei x Veränderungen gleichzeitig machen und
hinterher nicht wissen, was den Unterschied ausmachte.
Karl heinz Buchegger schrieb:
> Wenns dir nicht zu viel Arbeit macht, könntest du die Reihenfolge>> umdrehen? Zuerst Programm ausprobieren und erst dann den C ergänzen.
Nein, das ist doch kein Problem. Die Reihenfolge ist mir egal, solange
es anderen hilft mir zu helfen und ich anderen dadurch weniger Arbeit
machen kann :-)
Hallo zurück,
ich habe nun folgendes ausprobiert:
1. Das Programm von Karlheinz läuft problemlos, blinkt konstant durch
ohne Störungen --> Die Spannungsversorgung dürfte also passen
2. Der zusätzliche 100nF von Reset nach GND hat (daher vermutlich) auch
keine Veränderung bewirkt.
Demnach muss es wohl am Code oder an einer Störung des INT0 Pins liegen.
Prinzipielle Frage:
Der Reedkontakt wird ja mittels Widerstand und Kondensator entprellt (+
Schmitt Trigger im AVR selbst). Muss/soll man dann zusätzlich den Pullup
anschalten?
Ich habe mit und ohne versucht, beides mit gleichem Ergebnis, aber was
davon ist üblich/richtig?
Nun stehen wir wohl wieder am Anfang und können nur sagen, dass es wohl
nicht an der Spannungsversorgung liegt.
David schrieb:
> Den Kontakt kann ich auch nicht pollen oder, da er letztendlich vom> Radumfang nur ein Bruchteil ausmacht und somit ist er schlecht in einer> zyklischen Abfrage zu "erwischen". Oder habe ich einen Denkfehler?
Guten Abend zusammen,
für mich steht diese Frage immernoch im Raum als alternative Lösung.
Angenommen mein Felge ist 17", macht 1,355m Radumfang. Rechnen wir mit
1,5m, da der Reifenhöhe auch noch mit einfließt beim abrollen.
Angenommen ich fahre max. 200km/h, entspricht 55,5 m/s. Damit erhalte
ich ca. eine Frequenz von 37Hz (Pi mal Daumen).
Mein Reedkontakt würde also bei 200km/h 37 mal pro Sekunde betätigt
werden. Die Schaltzeit inkl. Prellzeit beträgt laut Datenblatt 0,5ms.
Nun ist der Reedkontakt vll. 1cm breit, wo er auf den Magnet reagiert.
Der die restlichen 135cm des Radumfangs wird der Reedkontakt nicht
betätigt. Demnach ist die Periodendauer, wo der Reedkontakt betätigt
ist, sehr gering.
Schaffe ich das mit Polling? Und wenn ja, mit welcher zyklischen Zeit
wäre das zu pollen (im Hinterkopf habe ich 2xFrequenz).
David schrieb:
> für mich steht diese Frage immernoch im Raum als alternative Lösung.> Angenommen mein Felge ist 17", macht 1,355m Radumfang. Rechnen wir mit> 1,5m, da der Reifenhöhe auch noch mit einfließt beim abrollen.
ok
> Angenommen ich fahre max. 200km/h, entspricht 55,5 m/s. Damit erhalte> ich ca. eine Frequenz von 37Hz (Pi mal Daumen).
ok
> Mein Reedkontakt würde also bei 200km/h 37 mal pro Sekunde betätigt> werden.
ok
> Die Schaltzeit inkl. Prellzeit beträgt laut Datenblatt 0,5ms.> Nun ist der Reedkontakt vll. 1cm breit, wo er auf den Magnet reagiert.> Der die restlichen 135cm des Radumfangs wird der Reedkontakt nicht> betätigt. Demnach ist die Periodendauer, wo der Reedkontakt betätigt> ist, sehr gering.
Du hast sooo gut angefangen.
Und jetzt hörst du mitten drin auf zu rechnen.
Mit 'sehr gering' kann man keine Aussagen treffen.
Dein Rad dreht sich 37 mal in der Sekunde. D.h. alle 1/37 Sekunde kommt
der Kontakt wieder vobei.
Der Kontakt wird nich am äusseren Ende des Rades angebracht sein,
sondern irgendwo in der Mitte, Sagen wir bei einem Radius von 1m. D.h.
bei einer Umdrehung spulen sich wieviele cm in dieser 1/37 Sekunde
durch? Dann kann man im Umkehrschluss ausrechnen, wie lange dieser 1cm
lange Kontakt braucht, um am Sensor vorbeizuhuschen.
Und das ist dann die Zahl, die du brauchst: Wie lang ist der Kontakt im
SIchtfeld des Sensors.
Moin,
Polling ist doch scheisse! Das muss auch mit dem Interrupt
funktionieren. Da muss einen doch der Ehrgeiz mal packen! Hast du ein
oszilloskop, mit dem du mal nachschauen kannst, was auf deinem INT0-Pin
so alles ankommt?
LG, Björn
Karl heinz Buchegger schrieb:
> Der Kontakt wird nich am äusseren Ende des Rades angebracht sein,> sondern irgendwo in der Mitte, Sagen wir bei einem Radius von 1m. D.h.> bei einer Umdrehung spulen sich wieviele cm in dieser 1/37 Sekunde> durch? Dann kann man im Umkehrschluss ausrechnen, wie lange dieser 1cm> lange Kontakt braucht, um am Sensor vorbeizuhuschen.
Ich nehme an, du meinst folgerichtig Umfang 1m, nicht Radius :-)
1m = 100cm, sodass 100cm/37Hz = 2,70cm (+zerquetschte) bewegen sich also
in einer 1/37 Sekunde vorbei.
Nehme ich nun der Einfachheit wegen 3cm an, so müsste ich bei 1cm
Reedbreite 3*37Hz als Frequenz nehmen bzw. um alle zu erwischen, sagt
man ja, doppelte Abtastrate 2*3*37Hz = 222Hz, was ca. 0,45ms entspricht.
In dieser Zeit müsste ich also den Kontakt pollen. Richtig?
Björn R. schrieb:
> Moin,> Polling ist doch scheisse! Das muss auch mit dem Interrupt> funktionieren. Da muss einen doch der Ehrgeiz mal packen! Hast du ein> oszilloskop, mit dem du mal nachschauen kannst, was auf deinem INT0-Pin> so alles ankommt?
Hallo Björn,
leider nein. Mich hat zwar der Ehrgeiz gepackt, aber ich weiß einfach im
Moment nicht weiter, sodass ich nach Alternativen Ausschau halte. Da ich
erst seit ca. 3-4 Monaten mich mit µC beschäftige, habe ich auch nicht
so die Erfahrung, um mögliche Fehler zu erkennen.
Alle Ideen hier im Forum habe ich erfolglos versucht umzusetzen :(
Testweise habe ich heute auch den INT Pin mal als Ausgang gesetzt und
versucht. Das INT reagiert ja auch, wenn der Portpin als Ausgang
definiert ist. Dies blieb jedoch auch ohne erfolg. Auch habe ich mal die
100nF durch 1µF ersetzt, um vielleicht so durch einen anderen Tiefpass
diese seltsamen Interrupts wegzubekommen, auch ohne erfolg...
David schrieb:
> Karl heinz Buchegger schrieb:>> Der Kontakt wird nich am äusseren Ende des Rades angebracht sein,>> sondern irgendwo in der Mitte, Sagen wir bei einem Radius von 1m. D.h.>> bei einer Umdrehung spulen sich wieviele cm in dieser 1/37 Sekunde>> durch? Dann kann man im Umkehrschluss ausrechnen, wie lange dieser 1cm>> lange Kontakt braucht, um am Sensor vorbeizuhuschen.>> Ich nehme an, du meinst folgerichtig Umfang 1m, nicht Radius :-)> 1m = 100cm, sodass 100cm/37Hz = 2,70cm (+zerquetschte) bewegen sich also> in einer 1/37 Sekunde vorbei.
Äh nein.
Wenn Der Kreis, auf dem der Kontakt sitzt, 37 Umdrehungen pro Sekunde
macht, und der Kreis 100cm Umfang hat, dann können nicht 2.7 cm in 1/37
Sekunden vorbeirauschen, sondern logischerweise 100cm pro 1/37 Sekunde
> Nehme ich nun der Einfachheit wegen 3cm an, so müsste ich bei 1cm> Reedbreite 3*37Hz als Frequenz nehmen bzw. um alle zu erwischen, sagt> man ja, doppelte Abtastrate 2*3*37Hz = 222Hz, was ca. 0,45ms entspricht.> In dieser Zeit müsste ich also den Kontakt pollen.
Den Rechengang hab ich jetzt nicht verstanden
100 cm 1/37 Sekunde
3 cm x
-------------------------------------
1
---- * 3
37 3
x = -------------- = ----------- = 0.00081 Sekunden = 0.8 ms
100 37 * 100
Läuft der µC mit 1Mhz heist das, du hast 800 Takte Zeit um die
Veränderung zu detektieren. 800 Takte sind ~600 bis 700 Assembler
Befehle.
Stimmt. Allerdings habe ich wohl mit dem 3cm aus der vorherigen Rechnung
auch wieder Verwirrung gestiftet, der Reed Kontakt ist ja nur 1cm breit.
Demnach 1/3700 = 0,27ms
Wenn ich jetzt noch die Abtastrate mit einrechne von 2, wäre ich bei
0,135ms.
Der µC läuft mit 8Mhz (interner Oszillator).
Macht das überhaupt Sinn dann zu pollen? Der µC soll ja später auch noch
andere Aufgaben erledigen, als nur dieses Kontakt abzufragen.
David schrieb:
> Stimmt. Allerdings habe ich wohl mit dem 3cm aus der vorherigen Rechnung> auch wieder Verwirrung gestiftet, der Reed Kontakt ist ja nur 1cm breit.> Demnach 1/3700 = 0,27ms> Wenn ich jetzt noch die Abtastrate mit einrechne von 2, wäre ich bei> 0,135ms.> Der µC läuft mit 8Mhz (interner Oszillator).> Macht das überhaupt Sinn dann zu pollen? Der µC soll ja später auch noch> andere Aufgaben erledigen, als nur dieses Kontakt abzufragen.
Ein 8-Bit Timer, der mit full Speed taktet, erzeugt dir alle 0.032 ms
einen Overflow Interrupt :-)
Ich würds aber trotzdem nicht pollen.
Hat dein Tiny keine Input Capture Unit?
Die ist eigentlich prädestiniert für solche Aufgaben.
Das meinte ich nicht als Problem. Ich könnte auch durch ein CTC ein
schnelleres Interrupt erzeugen. Mir geht es nur darum, ob ein so schnell
wiederkehrendes Timer Interrupt nicht soviel Ressourcen verschwendet,
sodass andere Aufgaben nicht zeitkritisch erledigt werden können.
Angedacht war noch ein Drehzahlmesser über die Input Capture Funktion
und eben die Ausgabe auf einem LCD der Werte (das wäre weniger
zeitkritisch).
David schrieb:
> Das meinte ich nicht als Problem. Ich könnte auch durch ein CTC ein> schnelleres Interrupt erzeugen. Mir geht es nur darum, ob ein so schnell> wiederkehrendes Timer Interrupt nicht soviel Ressourcen verschwendet,> sodass andere Aufgaben nicht zeitkritisch erledigt werden können.
Dazu musst du überlegen, was denn alles im Interrupt gemahct werden
muss.
Wichtig: muss! Nicht kann!
Gemacht werden muss: Einen Zähler um 1 hochzählen um die 1 Radumdrehung
zu registreieren. Was noch? Nichts sonst. Alles andere muss nicht im
Interrupt gemacht werden.
Vielen Dank für die aufschlussreiche Hilfestellung.
Ich werde morgen mal versuchen, das wirklich auf das Input Capture
umzuschreiben.
Den Drehzahlmesser wollte ich über einen Optokoppler einlesen,
vielleicht stören da die Signale ja nicht und dies wäre dann über das
INT möglich.
Ansonsten werde ich wohl dann doch pollen, wenn obiges nicht
funktioniert.
Nochmals vielen Dank und eine gute Nacht :-)
Hallo,
habe das mit Interesse gelesen und solche Spielereien schon oft
erfolgreich gemacht (Motorrad, Reed, IRQ0, Tacho).
Ich bin nicht sicher ob es sinnvoll ist, das Schaltfenster zu messen (so
hab ich es verstanden). Dieses hängt wohl auch von der Magnetstärke, der
Trägheit der Kontakte, dem Abstand Magnet-Reed und auch Reed-Radachse ab
(Stichwort Bahngeschwindigkeit).
Ich habe immer die Umdrehungszeit gemessen, also die Zeit zwischen zwei
Interrupts. Diese ist von den genannten Faktoren unabhängig und liefert
ein einwandfreies Ergebnis für Geschwndigkeit und gefahrene Strecke.
Ausserdem ist die steigende Flanke mit der RC Entprellung auch
problematisch, es gibt da eine Aufladekurve die das Fenster
beeinflußt...
Ein Tip: Reed soweit wie möglich zur Radachse hin, da flitzt der Magnet
am langsamsten vorbei.
Viel Erfolg wünsche ich...
Gruß
Thomas
Hallo Thomas,
das Programm oben misst auch von fallender zu fallender Flanke und tut
genau das, was du beschreibst, eben die Zeit zwischen 2 Interrupts zu
messen.
Dabei wird bei jeder fallenden Flanke eine LED angeschaltet, die bei
jeder steigenden wieder abgeschaltet wird. Daher ist die Zeit, wann die
steigende Flanke auftritt, unkritisch, da diese nur die LED abschaltet,
aber nichts mit der Messung zu tun hat.
Die LED dient nur zum sehen, ob der Reedkontakt noch sauber arbeiten und
schaltet bzw. wann er schaltet (gerade bei der Testphase vom Programm
sehr hilfreich).
Der Kontakt hat einen sehr geringen Abstand und schaltet ja auch. Es ist
nur das Problem, dass die Interrupts von selbst ausgelöst werden, auch
wenn ich den Reedkontakt ablöte, auch dessen Anschlüsse.
Irgendetwas von der Bordelektronik stört und zieht den Pin INT0 auf
Masse.
Deshalb war die Idee mit dem Schaltfenster als alternative angedacht, da
ich das mit der seltsamen Eigenauslösung am INT0 nicht auf die Reihe
bekomme.
Die Umdrehungszeit hängt aber sehr wohl vom Raddurchmesser bzw.
Abrollumfang ab (beim Fahrradtacho muss ja auch die Reifengröße
einstellen).
Hast du mit solchen Problemen zu kämpfen gehabt? Das sich das INT0 ohne
Schließung des Reed Kontaktes sporadisch selbst auslöst?
Hallo David,
OK, dann hatte ich das falsch verstanden. Ich habe da keine Probleme mit
"Selbstauslösern". Klar ist der Radumfang entscheidend, ich habe in
meinen Geräten den mit 2160mm eingestellt und änderbar gemacht (21 Zoll
Geländereifen). Bin damit 7000km Africarace von Marseille nach Dakar
letztes Jahr gefahren, ohne Theater!!
Haste mal versucht das mit einer Batterie testweise ohne Bordspannung zu
betreiben?
Ich habe bei mir eine Batterie drin (4,5V) und parallel mit Dioden
entkoppelt einen 7805 mit 100nF vorn und hinten und einem 100 Ohm
Vorwiderstand und noch einem 10µF Elko am Eingang. Hatte Angst vor
irgendwelchen Spikes die da im Bordnetz auftauchen könnten. Funktioniert
immer ohne Problem, Prozessor ist ein Atmega162.
Ich bin in Hofheim zwischen Wiesbaden und Frankfurt. Wenn du kein
Oszilloskop hast kannste gerne mal vorbeikommen, ich bin da gut
ausgestattet.
Wenn es auch ohne Reedkabel von allein auslöst weiß ich es auch nicht,
ein Test mit separater Batterie wäre mein nächster Versuch.
Gruß
Thomas