Hallo Leute! Ich arbeite da eigentlich schon länger dran, bzw. will jetzt wieder weiter machen. Also es sieht folgendermaßen aus: Ich mache ne Fernsteuerung für den Quadrokopter (mikrokopter) und die Bedienung dafür ist ein iPhone. Also iPhone WLAN --> Router WLAN zu Lan --> WEBSERVER + PPM-Ausgabe für TrainerPort einer Fernsteuerung. Damals hab ich das so gelöst, dass ich das myEthernet-Modul hatte und ein myAVR MK2 und die miteinander über i2c miteinander kommunizieren lassen wollte, also shared-Ram auslesen. Die Daten für das Shared-Ram werden per Ajax-Requests reingeschrieben. Da gab's dann aber seitens myAVR große Probleme beim i2c. Mit dem Bsp.-Skript zum auslesen eines solchen Datensatzes bekam ich keine Antwort wenn ich es als ganzes reingeschrieben habe, aber als ich es Befehl nach Befehl ins Terminal reingeklopft habe hat es funktioniert. Mit dem Bsp. C-code von ihnen hab ich sowieso nie was erreicht!...... selbst bei der Hotline gab's nur Fragezeichen zurück. Folglich zu kompliziert, buggy und wie's aussieht auch viel zu langsam!!! So, jetzt hab ich mir gedacht, dass die einzig SINNVOLLE Alternative wär, wenn ich im Webserver selbst gleich mein PPM generieren lasse mit den Werten die mir über's Lan reinkommen, aber was soll ich da jetzt konkret mir besorgen, verwenden.... was für Hardware würde sich dafür am Besten eignen??? Die Frage is halt auch noch, sind HTTP-Request's dafür wirklich geeignet (ich mein, ich brauch ja keine Daten zurück!)? 50 x 8Bit Datensätze pro Sekunde brauch ich für ein PPM. Ich könnte mehrere Datensätze zusammenfassen dann wärn das zb. 5 x 80Bit / Sekunde, also nen erfolgreichen Request jede 0,2 Sekunden, dass muss ja machbar sein!!! So jetzt lass ich mal eure Köpfe rauchen! ;-) Jeder noch so kleine Tipp, Trick, Hinweis..... bitte posten!!! DANKE!!!!! lg
Vermutlich weil die Köpfe noch rauchen? Wie groß wird wohl die Schnittmenge von Leuten sein, die AJAX und i2c können?
Wenn mir schon jemand mit "SCHNELL!" kommt ... Abgabetermin am Montag und bis jetzt den Arsch nicht hoch bekommen?
ja das ist ein wenig verwirrend! Ich hab damit den PPM gemeint. Ich wollt die ganze Sache eh editieren aber ich hab das als Gast geschrieben und hab mir dann nen Account gemacht für die Email-Benachrichtigungen. Jetzt steht da zwar mein Nickname neben dem (Gast), aber ich kann trotzdem NIX editieren. Ajax is Blödsinn (meines wissens nach)... das sind HTTP-Request's!!! Ich hab einfach Probleme den PPM zum laufen zu bringen, so dass ich ihn mit eben diesen halbwegs schnellen Update-Intervall von einem WEBSERVER beschalte. Ich würd ja auch gern auf I2C pfeiffen wenns geht. Nur beim myEthernet gabs da keine SINNVOLLE alternative, weil das mit seriell is meiner Meinung nach zu langsam und wie ich da die TImings hinbekomme versteh ich auch noch nicht so ganz. lg, sry
Winfried J. schrieb: > http://www.google.at/search?q=PPM&ie=utf-8&oe=utf-8&aq=t&rls=org.mozilla:de:official&client=firefox-a > > ???? naja, wenns ein Signal sein soll, dass in den Trainerport einer Fernsteuerung für ein Flugmodell eingespeißt werden soll, dann kann sich's vermutlich nurmehr um Puls-Pauen-Modulation handeln ;-) : http://de.wikipedia.org/wiki/Puls-Pausen-Modulation bei RC's gibts nur normale FM oder PPM, außer die 2,4Ghz extrabesonderheiten.. lg
Wieviele Daten/Bytes müssten denn seriell pro Sekunde rüber?
David P. (ThaBrad) schrieb: > > Die Frage is halt auch noch, sind HTTP-Request's dafür wirklich geeignet > (ich mein, ich brauch ja keine Daten zurück!)? > 50 x 8Bit Datensätze pro Sekunde brauch ich für ein PPM. Ich könnte > mehrere Datensätze zusammenfassen dann wärn das zb. 5 x 80Bit / Sekunde, > also nen erfolgreichen Request jede 0,2 Sekunden, dass muss ja machbar > sein!!! > das hab ich da oben schon mal kurz angesprochen... und ich denke, dass 256 Verfahrschritte pro Kanal zur Ansteuerung der Propellermotoren kan ok sind. .... ich seh gerade, dass du mich auf einen Fehler aufmerksam gemacht hast!!! .... ich hab nur für einen Kanal die Berechnung gemacht und es sind ja normalerweiße 8 Kanäle in einem PPM gemixt, wo ich aber nur jeweils die 4 für die 4 Motoren im Quadrokopter brauch! ;-) sorry!!! ok das heißt, das ganze mal 4 --> 4 x 8Bit / 22,2ms (45Hz) --> 32Bit/22,2ms in Sekunden -----> 1440Bit/s (min!) gut wär halt das Doppelte oder so, zur Fehlersicherheit vlt. lg
> Die in Modellfunkfernsteuerungen verwandte PPM ist nicht zu verwechseln > mit der Pulsphasenmodulation oder der Pulspositionmodulation. Es wird für > beide Verfahren dasselbe Akronym (PPM) eingesetzt, daher werden die > Verfahren häufig verwechselt. Es war mir nicht klar was du wohl konkret meinst und in der Übertreibung (mittels Google) liegt bekanntlich die Anschauung. zu deinem Problem die daten kommen als paket mittels IP und du hast einen Server, wenn nicht was spricht gegen XPort der hat außer der rs232 auch digitale statusports. Was spricht dagegen den in C oder jeden anderen Sprache so zu programmieren das er die gewünschtten PPM an einem Port ausgibt ansonsten such dir eine belibigen µC mit HW LAN und schreib ihm eine Firmware für dein Projekt, das spart nen haufen protokollumsetzungen und Rechenzeit
du gehst da völlig falsch ans problem dran... das iphone (website) besteht ausschließlich aus dem UserInterface und nichts anderem. das braucht daher keine 10ms sec nen request zu senden... (mal abgesehen davon bekommt man bei iphones, nokia n810/n900 etc. aufgrund der geringen power deutliche probleme mit hohen request zeiten. erfahrungsgemäß sind 200ms intervalle möglich, mehr jedoch nicht wenn es im browser läuft also AJAX. um die datenmenge zu reduzieren bietet sich json an). die frage ist jetzt was hast du als hardware für deinen embedded?? webserver zur verfügung, denn auf dem muss die gesammte signalgenerierung etc. unabhängig laufen! imao reicht da locker nen xport+atmega128 oder vergleichbares. dh zusammengefasst: überleg dir eine neue struktur bei dem der microcontroller alles an signalen erzeugt und ab und an mal neue daten über ethernet reinbekommt...
oder so etwas? http://www.modtronix.com/product_info.php?products_id=102 http://www.modtronix.com/popup_image.php?pID=102
Andi D. schrieb: > du gehst da völlig falsch ans problem dran... das iphone (website) > besteht ausschließlich aus dem UserInterface und nichts anderem. das > braucht daher keine 10ms sec nen request zu senden... (mal abgesehen > davon bekommt man bei iphones, nokia n810/n900 etc. aufgrund der > geringen power deutliche probleme mit hohen request zeiten. > erfahrungsgemäß sind 200ms intervalle möglich, mehr jedoch nicht wenn es > im browser läuft also AJAX. um die datenmenge zu reduzieren bietet sich > json an). > > die frage ist jetzt was hast du als hardware für deinen embedded?? > webserver zur verfügung, denn auf dem muss die gesammte > signalgenerierung etc. unabhängig laufen! imao reicht da locker nen > xport+atmega128 oder vergleichbares. > > dh zusammengefasst: überleg dir eine neue struktur bei dem der > microcontroller alles an signalen erzeugt und ab und an mal neue daten > über ethernet reinbekommt... Naja, ich hab ma eh dacht, dass einzige um das irgendwie sinnvoll zu lösen, wär, wenn ich das per JSON mache. Schnell felxible und es wird nirgends auf ein Ergebnis gewartet. Nur welcher WEBSERVER den ich, vorwiegend in AVR-Dialekt, C schreiben kann wär da die bessere wahl dafür?... Und KEINESFALLS will ich am WEBSERVER-Teil selbst Hand anlegen, max. der Kommunikation die die Daten weitergibt. Und lieb wär's mir, wenn ich mein myAVR MK2 dafür verwenden könnte (atmega8), also Verbindung zum Webserver (falls nötig) und zum generieren und ausgeben des PPM's. DAS zur HARDWARE, die ich gerne verwenden möchte. LOCKER auf jeden Fall reicht der für'n PPM und die Verbindung zu einem Webserver muss der auch sicher noch hinbekommen!!! ..... mit Xport hab ich keine Erfahrung. Hör das jetzt eigentlich denk ich zum ersten mal. Hast DU da genauere Info's dazu. Ich hab kurz mal gegooglt, aber aus dem bin ich nicht ganz schlau geworden. lg und danke schon mal!
Hmmm ... Ich persönlich würde von TCP und damit auch von HTTP abrücken und UDP benutzen. Kein Verbindungsaufbau und kein Protokoll, sondern einfach nur Pakete hinschicken. Sollte bei TCP nämlich ein Paket verloren gehen, wird dies nachträglich angefordert, bzw. muss neu geschickt werden, weil dafür keine Quittung eingegangen ist. Das könnte Deinen Datenstrom evtl. etwas aus dem Tritt bringen, vor allem, da Dir ja vermutlich nur die letzten Daten wichtig sind. UDP wird für Streaming genutzt. Ganz klar genau das, was Du machen möchtest. Im Server (Quadrokopt) werden dann einfach nur die UDP Pakete entgegengenommen, meinetwegen auch noch auf Korrektheit geprüft (Prüfsumme) und im Fehlerfall verworfen. Ansonsten hast Du an dieser Stelle einen Datenblock mit Daten wie Du sie abgeschickt hast. Auf dem Client läuft entweder eine eigenständige SW oder Du bettest z.B. ein Java-Programm in eine Webseite, die Du auf einem anderen Webserver ablegst, ein. ... meine Idee ... Gruß Jobst
äh.... ich weiß nicht so recht bzw. versteh ich's nicht so ganz, ich mein 10 MBit!!! da muss ich doch sowas langsames wie 1,4kbit hinbekommen ohne, dass ich gleich auf UDP umsteigen mach, was bei einem Flugobjekt die ganze Sache ziemlich unsicher macht! gibts nirgendswo was wo ich schnell wie http-post oder änlichen schnell arbeiten kann und direkt ausgänge ansteuern kann??? lg
David Panholzer schrieb: > äh.... > > ich weiß nicht so recht > bzw. versteh ich's nicht so ganz, ich mein 10 MBit!!! das ist die max. schnittstellen geschwindigkeit, protokol ist was anderes, und eine saubere impelmentation sowieso. > Also iPhone WLAN --> Router WLAN zu Lan --> WEBSERVER + PPM-Ausgabe da reicht eine sms aufs iphone oder kurz zu viel auslastung auf dem webserver, oder wlan oder lan und schon gibts ärger. > ... Bedienung dafür ist ein iPhone wofür ? weil es cool ist ? Ich habe ein kühlschrank mit TFT und WLAN - das ist viel cooler als iphone, ich würde trotzdem nicht auf so eine super idee kommen es für fernsteuerung zu benutzen. > Fernsteuerung für den Quadrokopter der soll dabei auch fliegen, oder ? Was kostet so ein teil? Wenn was schief geht stürzt der ab, oder ? Hauptsache cool gewesen.
sorry, aber solche Antoworten sind überflüssig..... ich werd wohl schon meine Gründe haben... und wenn ich schon fast alles fertig gehabt habe nur meine Verbindung über I2C jedesmal abgekackt ist, werd ich wohl ich nicht so ein Dummer Anfänger sein der einfach nur so dahinbaut und Sachen dafür verwendet NUR WEILS "COOL" IS!!!!! nein, es geht darum, dass ich mit dem Beschleunigungssensor von dem Ding arbeite als sozusagen MotionControl. Die Kraft liegt in der Software dann die man schreiben kann, die ich auf keinen µC bekomm in den ich nicht jetzt noch hunderte €'s investieren muss. Außerdem kann ich so noch brutal viele EXTRAS einbauen die sonst nur schwer oder sehr zeitaufwendig anders zu realisieren wäre. So paar Sachen dazu wär halt: - Beschleunigungssensoren + MAGNETFELDsensor (als Peripherie für µC alleine an die 100€) - Statusinformationen oder vlt. auch mal ne mini-CAM - vordefinierte Wegepunkte abfahren - A.I., lernen wie sich das Programm selber verbessern kann in gewissen Flug-lern-modi - großes Thema GPS..... alleine vom Ort des Quadro's zum Pilot zurückzufliegen .................undundundund.... ich glaube ihr versteht was ich meine..... es ist ja eigentlich ein ALTES UNFERTIGES Projekt, dass einzig und allein an der BLÖDEN Verbindung gescheitert ist. Und ja schon klar.... 10Mbit sind gleich 10Mbit, ich hab ja nicht umsonst das ganze OSI-Schichtenmodell und die VIEL VIELEN kleinen netten Details dazu in der Schule gelernt. Nur jetzt Programmiermäßig in RICHTUNG Hardware haben wir leider so gut wie NIX gemacht! AJA @Thomas R. http://ardrone.parrot.com/parrot-ar-drone/en/ und ja WiFi hat 54Mbit, aber nicht vergessen WLAN und LAN sind zwei paar Schuhe. Da bekommst du praktisch grade mal max. dass zusammen was du mit 10Mbit Ethernet schaffst!!! Aja und kann mir kaum vorstellen, dass eine sms bei den 400Mhz irgendwas anrichtet, da ich selbst schon drauf genügend Programme geschrieben hab. es geht jetzt rein um das WLAN und was mir da Geschwindigkeit rauben kann! ich brauch Lösungen für mein WEBSERVER Problem.... weiß keine wie ich das mit JSON lösen könnte??? lg
David Panholzer schrieb: > ich brauch Lösungen für mein WEBSERVER Problem.... > weiß keine wie ich das mit JSON lösen könnte??? Irgenwie check ich nicht was der Webserver jetzt damit zu tun hat? Zumal JSON nur die Serialisierung für Strukturierten Informationsaustausch ist. Mal mal am besten ein Bild welche Information von wo nach wo fließen sollen, und wo das Problem eigentlich liegt. Die komplette Steuereung über LAN/WLAN ist wohl etwas overpowered...
Angehängte Dateien:
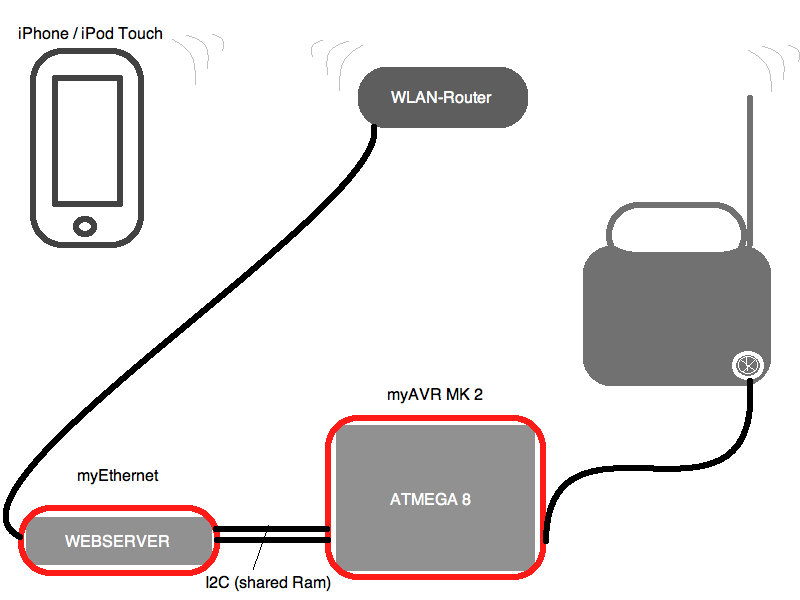
Vom iPhone einfach der Datenfluss von den 4*8Bit pro PPM Zeitschlitz (22,2ms) zum Webserver, rein die 4*8Bit-DAten weiter zum myAVR MK2 der verarbeitet das dann in einen PPM und gibt dass dann an den Trainer-Port der Fernsteuerung. (Sorry hab vergessen vom myAVR MK2 zur Fernsteuerung den PPM einzuzeichnen!!!) Ok das mit JSON is Mist.... wie gesagt, dass ist nicht mein Gebiet! Ich hab mal ein kleines Schema vom aktuellen Aufbau dranngehängt. Hoffe jetzt ist das oben beschriebene Problem verständlicher. lg
Angehängte Dateien:
-

PPM_-_Schema.png
10 KB
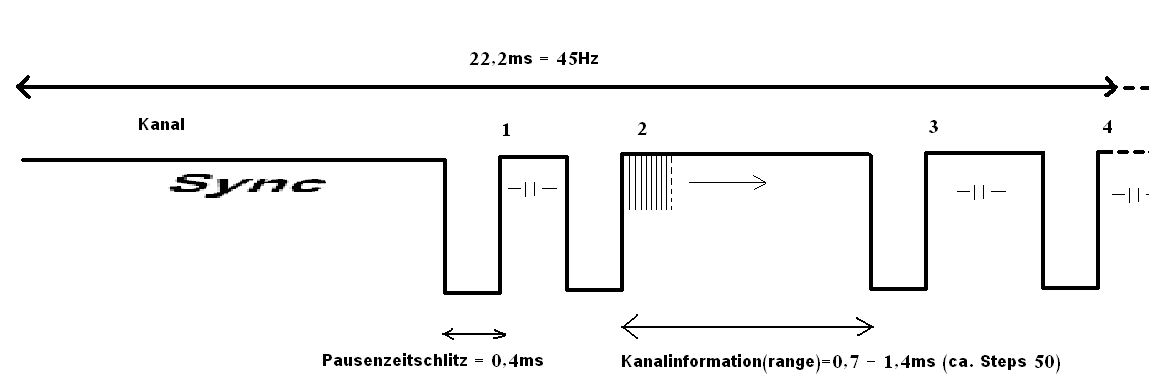
hier noch der PPM der Fernsteuerung kommt 8 mal vor, aber nur 4 davon brauch ich und die halt in 256 Schritte = 8Bit ... sollte reichen
David Panholzer schrieb: > sorry, aber solche Antoworten sind überflüssig..... ABer wenn etwas meiner ANsicht nach Mist ist, dann muss man das auch sagen dürfen. Und ja: Ich bin auch der Meinung du gehst das falsch an. > ich werd wohl schon meine Gründe haben... und wenn ich schon fast alles > fertig gehabt habe nur meine Verbindung über I2C jedesmal abgekackt ist, > werd ich wohl ich nicht so ein Dummer Anfänger sein der einfach nur so > dahinbaut und Sachen dafür verwendet NUR WEILS "COOL" IS!!!!! Trotzdem muss man ab und an zur Kentnis nehmen, dass sich eine Idee als nicht so gute Idee herausstellt. Selbst wenn schon alles fertig ist. Was du brauchst: Du brauchst einen µC der grundsätzlich deinen Mikrocopter ganz alleine fliegen lassen kann. Der alle Motorregler ansteuert, logischerweise die PPM Signale eigenständig generiert, und sich um das Gefährt autonom kümmert. Dieser µC erhält dann Befehle. Aber nicht Befehle auf niedriger Ebene, sondern auf hoher Ebene: Drehe 30° nach rechts, drehe 45° nach links, fliege vorwärts, 0.5 Meter hoch etc. Dein µC muss in der Lage sein, völlig autonom diese Befehle zu behandeln und auszuführen. Und an diesen µC macht es dann Sinn ein Web-Interface anzukoppeln, so dass du über Internet deinen Mikrocopter aus 6000km Entfernung steuern kannst. Und dazu reicht es völlig aus, wenn der Web-Server mit dem µC über eine RS232 kommuniziert. Und nein. Ohne Eigenleistung in Form von Programmierung wirst du da nicht weit kommen. Und ja: Ich denke, ehe du das über eine derart unsichere Verbindung realisierst, solltest du erst mal deinen Quadrokopter mit einer ganz normalen handelsüblichen Fernsteuerung in den Griff bekommen. Dann merkst du nämlich, was du eigentlich wirklich brauchst, wie schnell du wie reagieren musst und dass vor allen Dingen ein Touchscreen mit 20 mal auf einen Button drauftippen kein Ersatz für ein Kreuzknüppel darstellt.
Ich halte ein Iphone ja auf für ein unpraktisches User-Interface, aber sei es drum. Wo liegt denn nun das eigentliche Problem? Vielleicht auch zwei verschiedene überschneidende? Ist es so, daß der i2c nicht läuft? Das ist doch total easy.
@ Karl heinz Buchegger (kbuchegg) (Moderator) mich gehts nur an, wenn wer einfach nur kritisiert und nicht weiter zu helfen versucht, zu dem stell ich das nicht hier rein! Deswegen hab ich gesagt seine Antworten sind überflüssig! Es geht um die Plattform iPhone und einfach programmieren in Objective-C, dass war meine Arbeit für die Schule. Und in Objective-C bin ich schon halbwegs versiert deshalb will ich den Übertragungsteil so einfach wie möglich halten. Ich weiß schon was ich mach, bis auf die Lan-Übertragung, um rein DAS geht es mir. Ja ich hab schon alles mögliche mit dem Ding gemacht...!!! Und NEIN, eben nicht. Wenn es wirklich so ist, dass die Übertragung abbricht oder etc. schreib ich mir ein mini-Notfallprogramm noch rein, dass den PPM-Frame immer mitüberprüft und korrigiert aber den auf einer bestimmten Höhe einlocken ist ja nicht das Problem, dass bekomm ich leicht hin. Und NEIN, ich hab auch eben kein Problem mit programmieren. Hätte ja schon alles in den Atmega8 reineklopft, nur bleibt er in einer Schleife hängen jedesmal und somit kann ich keine Daten aus dem SharedRam abolen. Sonst wär der Teil bis auf die Fehlersicherheit ABGESCHLOSSEN. Ich versuch jetzt nur "neue Wege" zu gehen, weil ich mir denke, dass der myEthernet eben das auch nicht packen wird. Und iPhone soll keinen Steuerknüppel zwingend ersetzten. Es soll eine angenehme Alternative dazu mal sein. Über Beschleunigungssensor und Magnetfeldsensor generier ich mir meinen Knüppel zu den 4*8Bit-Strom, dass ist easy. Das ganze Richtungszeugs und und und.... alles per Objective-C am iPhone. Und wenns wer noch genau wissen will, Höhe werd ich warscheinlich einzig und allein per Touch machen. Das lasst mal meine Sorge sein....... .................ich will nur den Datenstrom rausbekommen in einer anständigen Zeit!!! ________ so bitte könnt mir für das was ich jetzt schreibe eine Lösung, Alternative oder einfach nur Tipps geben!!!!!!!!! DANKE!!! ________ @Abdul K. (ehydra)...... DANKE!!! er versteht mich! (ich weiß, aber es geht um Fluglogik die ich extrem angenehm auf dem iPhone, in der Programmiersprache, erledigen kann und gps und so...) - I2C mit dem myEthernet funzt nicht (obwohl ich ihr Bsp-Programm verwendet habe)!! - Gibt es noch eine BESSERE Alterative als mit HTTP-Request's zu arbeiten??? (bzw.) - Wie ist der von "Karl heinz Buchegger" genannte Tipp zu realisieren? Konkrete Gerätschaften, wenn möglich! lg
Mit dir ist es schwierig und eigentlich schrieb ich in einem anderen Thread zu solcher menschlicher Kommunikation, das ich solche nicht mehr weiterverfolge. Aber konkret würde ich an deiner Stelle die i2c-Kommunikation loggen. Wenn es denn in Software nicht geht oder keinen Erfolg bringt, dann eben auf Hardwareebene. WLAN ansich ist übrigens auch sehr unsicher. Bei besten Bedingungen kommt man gerade auf 300m. Etwas Hindernisse und du bist bei 30m oder eben es geht gar nix mehr!
David Panholzer schrieb: > .................ich will nur den Datenstrom rausbekommen in einer > anständigen Zeit!!! und wie schon gesagt: das wird nichts, wenn du die ppm Signale am iPhone generieren willst. Die PPM Generierung muss lokal am Mikrocopter erfolgen. Auf der Funkstrecke hast du Befehle laufen wie: Nicken 5° Rollen 90° etc. Daraus generiert dann der µC im Mikrocopter die PPM Signale, die diese Befehle mit den Motorreglern implementiern. Deine iPhone 0-Lage entspricht Nicken 0 Rollen 0 Gieren 0 Jede Lageänderung des iPhones wird dann in entsprechende Kommandos umgesetzt Nicken 5° (das bedeutet: du hast das iPhone nach vorne geneigt, auf eine Neigung von 5° und der Mikrocopter soll dieselbe Neigung einnehmen.) Hältst du das iPhone wieder waagrecht geht wieder ein Kommando zum µC im Mikrocopter Nicken 0° d.h. der µC soll sich wieder in die waagrechte ausrichten. Im Grunde sendet dein iPhone ständig seine Lage im Raum an den µC auf dem Mikrocopter. Und der µC im MC erzeugt daraus die PPM Signale für die Motoransteuerung. Auf die Art ist es auch nicht so schlimm, wenn mal ein Datenpaket verloren geht. Der µC im MC hält einfach seine letzte bekannte Lage bis er wieder ein korrektes Komplettpaket bekommt. Aber PPM über diese Verbindung: vergiss es. Das wird nichts. Dein Ansatz alles lokal am iPhone bis hin zur PPM Generierung machen zu wollen, taugt einfach nichts. In deinem Fall musst du Aufgabenteilung betreiben. Um den Kleinkram wie PPM Generierung muss sich der µC am MC kümmern. Anders als bei einer Funkfernsteuerung hast du ganz einfach keinen Übertragungskanal, dem du vertrauen kannst. Sowohl was Zuverlässigkeit als auch was Timinggenauigkeit angeht.
Wenn die Verzögerung einige 100ms überschreitet, wirds eh nur noch mit extensivem Training möglich sein, die Drohne am Himmel zu halten! Denn dann greifen die ganzen 'eingebauten' Dinge im Hirn nich mehr. Ich sehe schon das Iphone heftigst im Wind hin- und herschwingend, während der Benutzer angstvoll seiner schaukelnden Drohne am Himmel hinterhersieht. Autonomer Flug war doch genehmigungspflichtig??
Karl heinz Buchegger schrieb: > David Panholzer schrieb: > >> .................ich will nur den Datenstrom rausbekommen in einer >> anständigen Zeit!!! > > und wie schon gesagt: > das wird nichts, wenn du die ppm Signale am iPhone generieren willst. > Die PPM Generierung muss lokal am Mikrocopter erfolgen. > und wie von mir schon erklärt, wird der PPM im µ,C zu dem fertigen standardisiertem RC-Anlagen-PPM, zusammengebaut aus halt den 4 x 8Bit. Sonst würd ich Datenraten zusammenbekommen die bis in den Mbit-Bereich gehen würden!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! (so blöd bin ich dann auch wieder nicht) das is ja klar! ich hab ja eh gesagt, dass die 4 x 8Bit nur Übertragen werden sollen... oda hab ich mich da falsch ausgedrückt, dann SORRY!!! lg
Du hast zwar viel geschrieben (vor allen Dingen eine Menge Buzzwords aus dem HTML Umfeld) aber kaum was gesagt. Ich bin raus. Und wofür du für das alles einen Web-Server brauchst, ist mir ehrlich gesagt auch nicht wirklich klar.
Übertreib es doch nicht mit den Satzzeichen! Im Mikrokopter Forum gibt es übrigens schon eine Handy Steuerung über Bluetooth. Nur für den Fall, dass du das noch nicht wusstest.
David Panholzer schrieb: > ich hab ja nicht > umsonst das ganze OSI-Schichtenmodell und die VIEL VIELEN kleinen netten > Details dazu in der Schule gelernt. Dann wundert es mich umso mehr, daß Du nicht von Deinem komischen Webserver Abstand nehmen möchtest. Karl heinz Buchegger schrieb: > Ich bin raus. Ich auch. Ist mir zu dusselig ... Gruß Jobst
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.