Hallo,
beim Vergleich zwischen Gyroskopen und Beschleunigungssensoren werden
beide an einem Pendel befestigt. Das Pendel wird wie folgt ausgelenkt
und dann losgelassen.
-------------------- ---------------------
| | | |
------------ |
|
|
|
Hierbei werden sowohl die Signale des Gyros ω (tangential) sowie die at
erfasst.
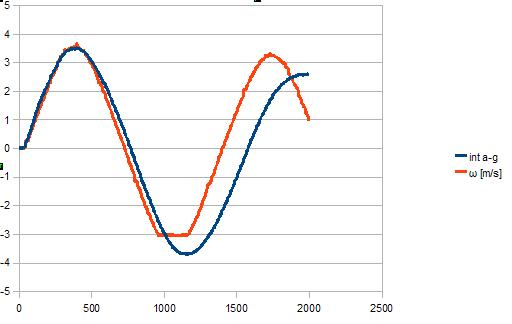
Nun wird das Beschleunigungssignal nach Offsetkorrektur und
winkelabhängiger Subtraktion von g (Erdbeschleunigung) integriert.
Diagramm siehe Anhang
Die Phasenverschiebung soll nun noch kompensiert werden.
Bisher wird die Erdbeschleunigung linear über g*sin(alpha) subtrahiert.
Nun meine Frage, kann die Pahsenverschiebung durch den Linearitätsfehler
der g-Kompensation zustande kommen, bzw. gibt es eine Möglichkeit, die
Erdbeschleunigung sinnvoller zu kompensieren?
Grüße Yel
Angehängte Dateien:
-

Diagramm.PNG
59 KB
Yel schrieb: > Bisher wird die Erdbeschleunigung linear über g*sin(alpha) subtrahiert. Meinst du damit, dass du den sinus über seine Reihendarstellung approximiert hast? Das ganze bringt aber nur brauchbare Ergebnisse, wenn der Auslenkungswinkel klein ist.
Die ganze Bewegung wird mit 100Hz digitalisiert, dies entspricht für einen Winkel von 90° in etwa 40 Messwerten. Die Kompensation läuft wei folgt: Zeitpunkt t=0ms g*sin(Pi/2) ... Zeitpunkt t = 400ms g*sin(0) Die Abstufung zwischen t=0ms und t=400ms bzw. zwischen 90° und 0° ist linear. Daher meine Vermutung, dass sich diese Linearität durch die Integration als Phasenverschiebung bemerkbar macht. Grüße
André M. schrieb: > Yel schrieb: >> Bisher wird die Erdbeschleunigung linear über g*sin(alpha) subtrahiert. > > Meinst du damit, dass du den sinus über seine Reihendarstellung > approximiert hast? Das ganze bringt aber nur brauchbare Ergebnisse, wenn > der Auslenkungswinkel klein ist. hä? wieso das denn?
Yel schrieb: > Die Kompensation läuft wei folgt: > > Zeitpunkt t=0ms > g*sin(Pi/2) > ... > Zeitpunkt t = 400ms > g*sin(0) Jetzt sind wir genau so schlau, wie vorher ;-) Yel schrieb: > Daher meine Vermutung, dass sich diese Linearität durch die Integration > als Phasenverschiebung bemerkbar macht. Der Bereich, in dem du hier Approximierst ist schon sehr groß. Da wirst du schon mit deutlichen Ungenauigkeiten rechnen müssen, wie sie eben auch auftauchen.
Johann L. schrieb: > André M. schrieb: >> Yel schrieb: >>> Bisher wird die Erdbeschleunigung linear über g*sin(alpha) subtrahiert. >> >> Meinst du damit, dass du den sinus über seine Reihendarstellung >> approximiert hast? Das ganze bringt aber nur brauchbare Ergebnisse, wenn >> der Auslenkungswinkel klein ist. > > hä? wieso das denn? Unter der Voraussetzung, dass alle Terme mit Potzen > 1 fallen gelassen werden.
Ok, gibt es eine andere Möglichkeit, die Erdbeschleunigung aus dem signal herauszubekommen?
André M. schrieb: > Johann L. schrieb: >> André M. schrieb: >>> Yel schrieb: >>>> Bisher wird die Erdbeschleunigung linear über g*sin(alpha) subtrahiert. >>> >>> Meinst du damit, dass du den sinus über seine Reihendarstellung >>> approximiert hast? Das ganze bringt aber nur brauchbare Ergebnisse, wenn >>> der Auslenkungswinkel klein ist. >> >> hä? wieso das denn? > > Unter der Voraussetzung, dass alle Terme mit Potzen > 1 fallen gelassen > werden. Wer lässt wo Terme fallen?
Johann L. schrieb: >> Unter der Voraussetzung, dass alle Terme mit Potzen > 1 fallen gelassen >> werden. > > Wer lässt wo Terme fallen? Ich bin davon ausgegangen, dass der Threadstarter für seine Berechnungen den Sinus linear approximiert hat. Dies lässt sich relativ gut über die Reihendarstellung des Sinus machen, indem man die Potenzen > 1 fallen lässt. Dies lässt sich aber nur für kleine Argumente des Sinus rechtfertigen.
> Nun meine Frage, kann die Pahsenverschiebung durch den > Linearitätsfehler der g-Kompensation zustande kommen, Ich hab aus deiner Beschreibung eher den Eindruck, als ob die Phasenverschiebung eigentlich 90 Grad sein muss, und du nur künstlich und fehlerhafterweise am Anfang bei beiden Signalen von 0 ausgehst, was sich dann (ähnlich dem Einschaltstrom eines Trafo der mit einem Schalter eingeschaltet wird) mit der Zeit hinbiegen muss.
Vielleicht ein Vorzeichenfehler? Die Gesamtbeschleunigung ist
wobei phi bei waagerechter Auslenkung 0 ist und am unteren Scheitelpunkt pi/2. Fehlerrechnung gemacht? Und leigt das Ergebnis in der erwarteten Toleranz?
Angehängte Dateien:
-

Diagramm2.PNG
4,4 KB
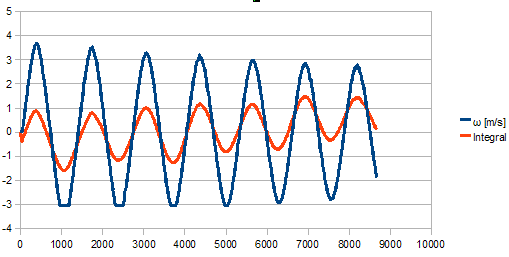
Wieso sollte die Phasenverschiebung 90° sein. Wenn ich ohne g-Kompensation die Werte des Beschleunigungssensors integriere kommt folgendes Bild zustande (siehe Anhang) Hier herrscht keine Phasenverschiebung, der Drift ist auch nicht das Problem. Allerdings muss die Erdbeschleunigung entfernt werden, was zur Phasenverschiebung des Diagramms aus meinem ersten Post führt. Meine Vermutung ist, dass durch die Variable Winkelgeschwindigkeit bzw. -beschleunigung ja nicht zu jedem Zeitwert der Selbe Winkel überstrichen wird, was durch die Linearität g*sin(alpha) zu einem Fehler führt.
Fehlerrechnugn hab ich keine gemacht, im Moment zeigt mir das Diagramm, das die Toleranz bei weitem überschritten wird. Vorzeichenfehler glaub ich nicht, da zum Einen die Erdbeschleunigung in der Ausgangslage wirkt und zum anderen es keinen Unterschied macht ob sin(90) oder cos (0). Der Sensor ist so am Pendel angebracht, dass zum Zeitpunkt t=0 die betreffende Achse des Sensors senkrecht auf dem Pendel steht.
Also nochmal zum Mitschreiben... 1) Du hast am Pendel ein Gyroskop, das die Auslenkung phi liefert 2) Du hast am Pendel einen a-Sensor, der die Beschleinigung in Tangentialrichtung des Pendels misst (ist das |at|?). 3) Aus dem gemessenen Tangential-Wert willst du den g-Anteil eliminieren
Johann L. schrieb: > Also nochmal zum Mitschreiben... > > 1) Du hast am Pendel ein Gyroskop, das die Auslenkung phi liefert > 2) Du hast am Pendel einen a-Sensor, der die Beschleinigung in > Tangentialrichtung des Pendels misst (ist das |at|?). > 3) Aus dem gemessenen Tangential-Wert willst du den g-Anteil eliminieren Zu 1) ich habe am Pendel ein Gyroskop, das die Winkelgeschwindigkeit ω in [°/s] liefert, dieser Wert wird in die Bahngeschwindigkeit (tangential) ω_t [m/s] umgerechnet. Zu 2) Ja Zu 3) Ja
Angehängte Dateien:
-

sin.gif
13 KB
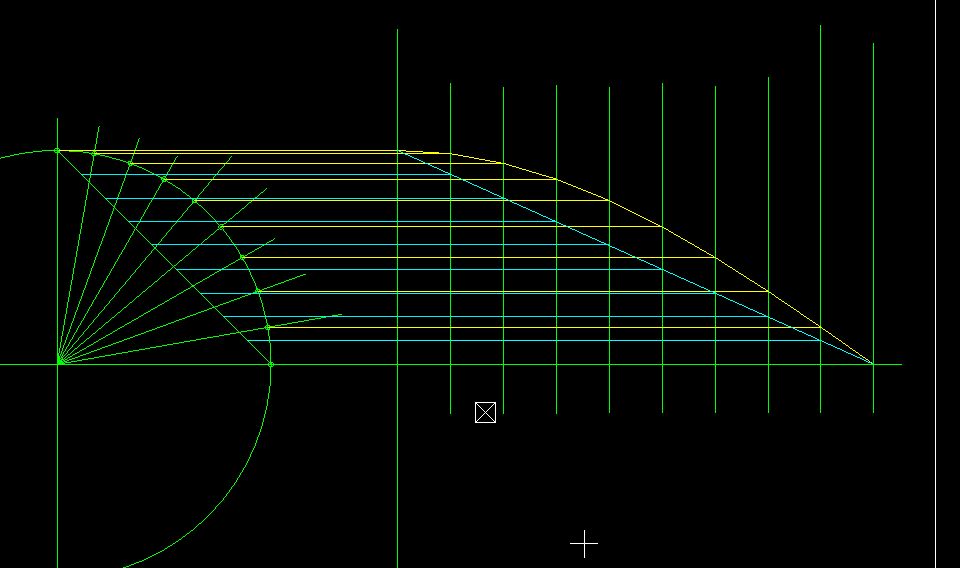
Wenn ich deine 'Interpolation' richtig verstanden habe, dann hast du folgendes gemacht. Du müsstest eigentlich für, sagen wir, alle 10 Grad der Schwingung den Sinus ausrechnen. (Im Bild die gelbe Konstruktion) und mit diesem Wert weiterrechnen. Das hast du aber nicht gemacht. Statt dessen hast du den Startpunkt und den unteren Totpunkt mit einer gedachten Geraden verbunden, diese Gerade in 9 gleiche Abschnitte geteilt (wegen der 10 Grad in diesem Beispiel), und dessen Wert statt des Sinus benutzt (hellblaue Konstuktion) Und dann wunderst du dich warum hinten und vorne nichts stimmt?
Danke, genau das ist das Problem, nun bin ich auf der Suche nach einer Möglichkeit, eben keine linearen Werte sondern die dementsprechend passenden Werte zu nehmen, allerdings habe ich weder den Winkel (den ich zwar über Integration der Gyroowerte bekommen könnte, was aber ja nicht sinnvoll ist, da ich die Messung der Geschwindigkeit über die Integration der Beschleunigung mit der des Gyroskopes vergleichen möchte) Karl heinz Buchegger schrieb: > Wenn ich deine 'Interpolation' richtig verstanden habe, dann hast du > folgendes gemacht. > > Du müsstest eigentlich für, sagen wir, alle 10 Grad der Schwingung den > Sinus ausrechnen. (Im Bild die gelbe Konstruktion) und mit diesem Wert > weiterrechnen. > > Das hast du aber nicht gemacht. > > Statt dessen hast du den Startpunkt und den unteren Totpunkt mit einer > gedachten Geraden verbunden, diese Gerade in 9 gleiche Abschnitte > geteilt (wegen der 10 Grad in diesem Beispiel), und dessen Wert statt > des Sinus benutzt (hellblaue Konstuktion) > > Und dann wunderst du dich warum hinten und vorne nichts stimmt? Danke, genau das ist das Problem, nun bin ich auf der Suche nach einer Möglichkeit, eben keine linearen Werte sondern die dementsprechend passenden Werte zu nehmen, allerdings habe ich leider den Winkel (den ich zwar über Integration der Gyrowerte bekommen könnte, was aber ja nicht sinnvoll ist, da ich die Messung der Geschwindigkeit über die Integration der Beschleunigung mit der des Gyroskopes vergleichen möchte). Gibt es eine Möglichkeit den Winkel bei gegebener Geometrie rechnerisch zu ermitteln? Gruß
Yel schrieb: > Danke, genau das ist das Problem, nun bin ich auf der Suche nach einer > Möglichkeit, eben keine linearen Werte sondern die dementsprechend > passenden Werte zu nehmen, allerdings habe ich weder den Winkel (den ich > zwar über Integration der Gyroowerte bekommen könnte, was aber ja nicht > sinnvoll ist, da ich die Messung der Geschwindigkeit über die > Integration der Beschleunigung mit der des Gyroskopes vergleichen > möchte) Es hilft alles nichts, du brauchst den Auslenkungswinkel Aber um ehrlich zu sein. Ich habe nicht den blassesten Schimmer, was eigentlich das (global gesehene) Ziel der ganzen Übung ist.
Karl heinz Buchegger schrieb: > Aber um ehrlich zu sein. > Ich habe nicht den blassesten Schimmer, was eigentlich das (global > gesehene) Ziel der ganzen Übung ist. Yel schrieb: > da ich die Messung der Geschwindigkeit über die > Integration der Beschleunigung mit der des Gyroskopes vergleichen > möchte Der Auslenkungswinkel beträgt 90°, es muss sich doch bestimmt über die Mathematik des physischen Pendels der Winkel zu einem bestimmten Zeitpunkt errechnen lassen. Karl heinz Buchegger schrieb: > Und dann wunderst du dich warum hinten und vorne nichts stimmt? Nein,ich wunder mich nicht, deswegen ja mein Posting ;)
Yel schrieb: > Der Auslenkungswinkel beträgt 90°, es muss sich doch bestimmt über die > Mathematik des physischen Pendels der Winkel zu einem bestimmten > Zeitpunkt errechnen lassen. Der a-Sensor misst die Geschwindigkeit in Tangentialrichtung, "sieht" also nicht, daß er sich auf einer Kreisbahn bewegt (das ergibt sich auch, wenn man's formal ausrechnet). Der a-Sensor misst also
ergo
...dabei gehe ich mal aus, daß der Beschleinigungssensor eine Beschleunigung miss -- eine Beschleunigung im phsyikalischen Sinne. :-) Oder tut er das nicht?
Johann L. schrieb: > Der a-Sensor misst die Geschwindigkeit in Tangentialrichtung, "sieht" -------------------------^^^^^^^^^^^^^^^ natürlich Beschleunigung
Johann L. schrieb: > ...dabei gehe ich mal aus, daß der Beschleinigungssensor eine > Beschleunigung miss -- eine Beschleunigung im phsyikalischen Sinne. :-) > > Oder tut er das nicht? Doch tut er Werd mich morgen früh mal mit den Formeln auseinandersetzen Vielen Dank an alle für die Antworten
Yel schrieb: > Johann L. schrieb: >> 2) Du hast am Pendel einen a-Sensor, der die Beschleunigung in >> Tangentialrichtung des Pendels misst (ist das |at|?). > > Zu 2) > Ja Was mich sehr wundert, ist daß du da überhaupt was misst. Die Bewegung ist nämlich in Tangentialrichtung (also in Messrichtung) frei, d.h. im Bezugssystem des a-Sensors wirst du ein Null-Resultat als Messergebnis bekommen. Ganz analog zum freien Fall oder zur reibungsfreihen Abfahrt auf einer schiefen Ebene und a-Messung in Fahrtrichtung. Das einzige, was du so wirst messen können, sind Zwankskräfte von aussen. Beispiel: Reibung. Und natürlich auch Festhalten in einer bestimmten Position. Wenn zB das Pendel um alpha aus der Ruhelage ausgelenkt und dort festgehalten wird, ist g*sin(alpha) zu gemessen; direkt nach dem Loslassen aber eben nicht mehr. Und das gilt für jeden Punkt der Bahn. ...was sich zusätzlich in der Messung niederschlägt ist das Trägheitsmoment (bzw. Effekte dessen) bei nicht-punktförmiger Pendelmasse. Ob dieser Effekt relevant ist, ist jedoch ne andere Frage. Also entweder versteh ich deinen Aufbau komplett falsch (der ja offenbar Messwerte != 0 liefert) oder ich brauch hier ganz dringend 'ne Physik-Auffrischung :o)
Guten Morgen, physikalisch gesehen ist die Tangentialkomponente der Erdbeschleunigung verantwortlich für at, was wiederum bei dem vorliegenden Messaufbau dazu führt, dass at !=0 ist. Da in der Realität aber zum Zeitpunkt t=0 keine Beschleunigung wirkt,die Achse des Sensors allerdings in Richtung der Erdbeschleunigung zeigt, zeigt der Sensor 1g an. Zwangsgräfte wirken vermutlich nur in Pendelrichtung.
Yel schrieb: > Guten Morgen, > > physikalisch gesehen ist die Tangentialkomponente der Erdbeschleunigung > verantwortlich für at, was wiederum bei dem vorliegenden Messaufbau dazu > führt, dass at !=0 ist. Da in der Realität aber zum Zeitpunkt t=0 keine > Beschleunigung wirkt,die Achse des Sensors allerdings in Richtung der > Erdbeschleunigung zeigt, zeigt der Sensor 1g an. Zwangsgräfte wirken > vermutlich nur in Pendelrichtung. Zum Zeitpunkt t=0 kann der Sensor doch nix anzeigen? Er befindet sich zu dem Zeitpunkt im senkrechten freien Fall nach unten, gerade nach dem Loslassen. Oder addiert er selbsttätig immer 1g in seine Achsrichtuing?
Johann L. schrieb: > Zum Zeitpunkt t=0 kann der Sensor doch nix anzeigen? Er befindet sich zu > dem Zeitpunkt im senkrechten freien Fall nach unten, gerade nach dem > Loslassen. Oder addiert er selbsttätig immer 1g in seine Achsrichtuing? Sorry, mein Fehler, vor dem Loslassen zeigt er 1g an, dann je nach Abtastung kurz 0 bzw die mit der Zeit größer werdende tangentiale Komponente.
Yel schrieb: > btastung kurz 0 bzw die mit der Zeit größer werdende tangentiale > Komponente. Zeigt er nicht eher eine radial wirkende Kraft an?
U.R. Schmitt schrieb: > Zeigt er nicht eher eine radial wirkende Kraft an? Auf dem anderen Kanal schon (Zentripedalbeschleunigung)
Johann L. schrieb: > Der a-Sensor misst die Geschwindigkeit in Tangentialrichtung, "sieht" > also nicht, daß er sich auf einer Kreisbahn bewegt (das ergibt sich > auch, wenn man's formal ausrechnet). Der a-Sensor misst also
kann eigentlich garnicht stimmen, denn dies würde bedeuten, dass beim Durchqueren der Nulllage
wäre, was aber aufgrund der Trägheit eigentlich nicht geht oder?
das mit at=0 passt doch auch. Das Pendel geht beim Durchqueren der Nulllage von der Beschleunigungsphase in die Abbremsphase über. Dein Messaufbau wirft aber generell irgendwie Rätsel auf. Die Tangentialbeschl.(also der Anteil der Erdbeschl. entsprechend Formel) wirkt doch in jedem Punkt der Kreisbahn auf das ganze Pendel (also auf Sensorgehäuse und der kleinen Seismischen-Masse gleichermaßen). Der Beschleunigungssensor kann aber nur die Unterschiede Zwischen seinem Gehäuse und eben dieser Seismischen-Masse auswerten. Der Effekt wäre also, dass der Beschleunigungssensor in jedem Punkt der Pendelbahn 0g anzeigen sollte (in Tangetialrichtung). Beschreib evtl den Aufbau nochmal genauer.
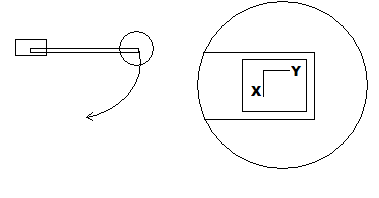
Richtig, das mit
stimmt, ist ja logisch ;-) Der Messaufbau entspricht dem angehängten Bild. bs schrieb: > Der > Beschleunigungssensor kann aber nur die Unterschiede Zwischen seinem > Gehäuse und eben dieser Seismischen-Masse auswerten. Der Effekt wäre > also, dass der Beschleunigungssensor in jedem Punkt der Pendelbahn 0g > anzeigen sollte (in Tangetialrichtung). Da ich ja definitiv reproduzierbare Messwerte bekomme, kann es eigentlich nicht sein, wobei die Erklärung plausibel klingt. Seltsamerweise funktioniert ja auch die Integration mit der gemessenen Geschwindigkeit überein, zumindest am Anfang. Ich vermute weiterhin, dass das Problem in der angenäherten Subtraktion der Erdbeschleunigung liegt und sich mit fortlaufender Zeit weiter fortsetzt.
bs schrieb: > Beschreib evtl den Aufbau nochmal genauer. Achso, ok, etwas genauer. Das Pendel wird aus horizontaler Position losgelassen. Die analogen Messwerte werden mit 10bit AD-gewandelt und in Excel in physikalisch sinnvolle Einheiten umgerechnet und integriert. Das Pendel besteht aus einem 50cm langen Alustab.
zeigt das Diagramm1.png die tatsächlichen Messwerte der at oder ist hier schon eine Verrechnung/Normierung mit dem Gyro erfolgt? Verdacht: Gyro verändert durch Berechnung den Offset (die g-Korrektur), was sich dann auf die erwarteten 0g addiert den Sinus ergibt.
Diagramm 1 zeigt in rot die gemessene Winkelgeschwindigkeit in [m/s] umgerechnet. Hierzu wird ω von [°/s] in [1/s] und dann mittles Multiplikation mit dem Radius in die Bahngeschwindigkeit [m/s] umgerechnet. Die blaue Kurve entspricht den integrierten Werten des Beschleunigungssensors, die ja im Moment der Messung bereits g also [m/s²] liefern.
bs schrieb: > Die > Tangentialbeschl.(also der Anteil der Erdbeschl. entsprechend Formel) > wirkt doch in jedem Punkt der Kreisbahn auf das ganze Pendel (also auf > Sensorgehäuse und der kleinen Seismischen-Masse gleichermaßen). Der > Beschleunigungssensor kann aber nur die Unterschiede Zwischen seinem > Gehäuse und eben dieser Seismischen-Masse auswerten. Der Effekt wäre > also, dass der Beschleunigungssensor in jedem Punkt der Pendelbahn 0g > anzeigen sollte (in Tangetialrichtung). Ja, müsste so sein. Deshalb verstehe ich auch nicht, warum überhaupt Messergebnisse != 0 rauskommen bei freischwingendem Pendel. Es sei denn (wie ich oben bereits schrieb) -- Reibung ist nicht vernachlässigbar -- a-Sensor ist nicht exakt in Tangentialrichtung justiert Es entspricht dem Versuchsaufbau eins Klötzchens auf einer Schaukel: Das Klötzchen fällt nicht um.
So langsam versteh ich deine Messergebnisse: Die blaue Kurve ist das Integral der a-Messung, begonnen bei waagerechter Auslenkung. Die Ableitung, also das a-SIgnal, war also cos-förmig. So wie auch bs schon schrieb, ist die Bewegung in Taggentialrichtung frei, und im Loslassmoment ist das Pendel im freien Fall nach unten. Daher muss das Messergebnis von einer Bremsung herrühren. Ich gehe mal davon aus, daß die Masse des Al-Stabes nicht gegen die Masse der Sensoren vernachlässigbar ist? Das bedeutet aber, daß das Trägheitsmoment der Aufhängung (des Pendels) nicht vernachlässigbar ist. http://de.wikipedia.org/wiki/Tr%C3%A4gheitsmoment Das Trägheitsmoment der Stange ist
r = Radius des Al-Stabes l = Länge des Al-Stabes m = Masse des Stabes J bewirkt eine Bremsung, d.h. das Pendel bewegt sich nicht vollkommen frei. J wirkt sich um so stärker aus, je größer die Tangentialbeschleunigung ist. J in die Rechnung einzubeziehen geht recht einfach über die Energieerhaltung, d.h. zu potentieller und kinetischer Energie kommt noch eine Rotationsenergie, deren Summe eine Invariante ist (Energieerhaltung)
Ich denke Johann hat recht. Eigentlich misst der TE einen Seiteneffekt, weil der Sensor nicht im Schwerpunkt des Pendels aufgehängt ist. Wäre er im Schwerpunkt und man könnte die Reibung (incl. Luftreibung) vernachlässigen, dann dürfte er nur radial etwas messen da tangential die Bewegung frei ist.
U.R. Schmitt schrieb: > Wäre er > im Schwerpunkt und man könnte die Reibung (incl. Luftreibung) > vernachlässigen, dann dürfte er nur radial etwas messen da tangential > die Bewegung frei ist. Selbst dann hat die Aufhängung ein Trägheitsmoment.
Johann L. schrieb: > Selbst dann hat die Aufhängung ein Trägheitsmoment. Hmm das ist richtig. Oh man Physik ist schon so lange her und man vergisst so viel... :-)
Stimmt das mit dem Trägheitsmoment des Stabes spielt hier die entscheidende Rolle. Ziel war es doch die at zu messen. Sinnvoll erscheint es mir daher den Beschl.Sensor am Drehpunkt des Pendels zu montieren (als Statischer Neigungssensor). Die dann gemessene Beschleunigung entspricht der at im Schwerpunkt des gesamten Pendels. Wenn Sensor und Schaltung ausreichend klein gegenüber Pendel sind kann deren Trägheitsmoment ja dann vernachlässigt werden (r geht gegen Null)
bs schrieb: > Stimmt das mit dem Trägheitsmoment des Stabes spielt hier die > entscheidende Rolle. Das ist richtig, die rechnerische Überprüfung der Gyrowerte, also der Winkelgeschwindigkeit findet über die Energieerhaltung
statt und hier geht das Trägheitsmoment mit ein. Die gemessenen Werte stimmen bis auf ein paar Kommastellen (Reibung, Luftwiderstand,...) mit den rechnerisch ermittelten Werten überein. Da nachweislich eine sich ändernde Geschwindigkeit vorhanden ist, muss auch eine Beschleunigung vorhanden sein. Eben diese versuche ich zu messen. Fakt ist, dass die Beschleunigungswerte integriert, bis auf die Phasenverschiebung (Diagramm 1) ja auch mehr oder weniger übereinstimmen, also ein physikalisch sinnvolles Ergebniss liefern. Karl heinz Buchegger schrieb: > Statt dessen hast du den Startpunkt und den unteren Totpunkt mit einer > gedachten Geraden verbunden, diese Gerade in 9 gleiche Abschnitte > geteilt (wegen der 10 Grad in diesem Beispiel), und dessen Wert statt > des Sinus benutzt (hellblaue Konstuktion) > > Und dann wunderst du dich warum hinten und vorne nichts stimmt? Ich denke eher, dass das Problem in der g-Kompensation liegt. bs schrieb: > Ziel war es doch die at zu messen. Sinnvoll erscheint es mir daher den > Beschl.Sensor am Drehpunkt des Pendels zu montieren (als Statischer > Neigungssensor). Die dann gemessene Beschleunigung entspricht der at im > Schwerpunkt des gesamten Pendels. Wenn Sensor und Schaltung ausreichend > klein gegenüber Pendel sind kann deren Trägheitsmoment ja dann > vernachlässigt werden (r geht gegen Null) Klingt vielversprechend, werd ich am Montag auf jeden Fall mal ausprobieren.
Yel schrieb: > Da nachweislich eine sich ändernde Geschwindigkeit vorhanden ist, muss > auch eine Beschleunigung vorhanden sein. > Eben diese versuche ich zu messen. Folgendes Gedankenexperiment: Du lässt einen a-Sensor vom Tisch fallen. Nachweislich gibt es eine Geschwindigkeitsänderung während des Falls, denn es ist eine Beschleunigung vorhanden. Preisfrage: Was wird der a-Sensor messen? Zweites Gedankenexperiment: Der a-Sensor liegt auf einem Tisch. Er bewegt sich nicht, hat folglich keine Geschwindigkeitsänderung und es wirkt keine Beschleunigung. Preisfrage II: Was zeigt der a-Sensor nun an? Der Knackpunkt ist das Bezugssystem, auf das du die Beschleunigung beziehst. Wenn du von einem Bezugsystem in ein anderes wechselst, kannst du nicht einfach Beschleunigungen übernehmen. > bs schrieb: >> Ziel war es doch die at zu messen. Sinnvoll erscheint es mir daher den >> Beschl.Sensor am Drehpunkt des Pendels zu montieren (als Statischer >> Neigungssensor). > Klingt vielversprechend, werd ich am Montag auf jeden Fall mal > ausprobieren. Jepp
Johann L. schrieb: > Folgendes Gedankenexperiment: Mir ist schon klar was gemeint ist, bringt mich ja auch zum Nachdenken. Ist halt schon ein großer Zufall, dass mein gemessenes Signal, woher auch immer dieses dann stammen mag, integriert meiner nachweislich richtigen Geschwindigkeit entspricht. Irgendwie passt da doch was nicht zusammen...?
Johann L. schrieb: > Vielleicht ein Vorzeichenfehler? > Die Gesamtbeschleunigung istwobei phi bei waagerechter Auslenkung 0 ist und am unteren Scheitelpunkt > pi/2. http://www.mikrocontroller.net/math/d32199835b8951d5b5c7b1d2152fa999.png?source=%0D%0A%5Cvec+a+%3D+%5Cbinom%7B-r%5Comega%5E2%5Csin%5Cphi%7D%7Br%5Comega%5E2%5Ccos%5Cphi%2Bg%5Csin%5Cphi%7D%0D%0A Könntest du bitte erklären, wie du auf diesen Vektor gekommen bist?! Ich nehme an, dass sich das ganze auf Polarkoordinaten bezieht. Ist die erste Komponente in radialer oder tangentialer Richtung? Normalerweise schaut die Bewegungsgleichung eines Pendels in Polarkoordinaten anders aus. Die Erdschwerefeldstärke g beeinflusst die Radial- und Tangentialkomponente, ebenfalls ist die zweite Ableitung des Winkels enthalten.
Johann L. schrieb: > Folgendes Gedankenexperiment: Nochmal was dazu, beim freien Fall ist ja klar, dass der Sensor mit der Zeit nichts mehr anzeigt, Beim zweiten Experiment zeigt er je nach Lage -1 bis 1g an ;) Klingt ja alles plausibel. Beim Pendel aber befindet er sich ja nie im freien Fall, da die Erdbeschleunigung mit zunemehnedn Winkel gegen 0 geht, erst beim durchqueren der Nulllage findet wieder eine Beschleunigung(Bremsen) statt. Jedoch ändert sich doch die tangentiale Beschleunigung mit jeden Zeitschritt. Oder? Somit müsste auf den Sensor eine sich ständig ändernde Beschleunigung wirken, die schon allein durch die Trägheit der Sensorelemente detektierbar sein müsste. Da sich der Sensor ja nie mit einer konstanten Beschleunigung wie im freien Fall bewegt.
Yel schrieb: > > Nochmal was dazu, beim freien Fall ist ja klar, dass der Sensor mit der > Zeit nichts mehr anzeigt, Der Sensor zeigt keine Beschleunigung wird aber beschleunigt... > Beim zweiten Experiment zeigt er je nach Lage -1 bis 1g an ;) ...bzw. wird beschleunigt liegt aber still aufm Tisch. Wo ist der Denkfehler? > Klingt ja alles plausibel. > > Beim Pendel aber befindet er sich ja nie im freien Fall, da die > Erdbeschleunigung mit zunemehnedn Winkel gegen 0 geht, erst beim > durchqueren der Nulllage findet wieder eine Beschleunigung(Bremsen) > statt. > > Jedoch ändert sich doch die tangentiale Beschleunigung mit jeden > Zeitschritt. Oder? > Somit müsste auf den Sensor eine sich ständig ändernde Beschleunigung > wirken, die schon allein durch die Trägheit der Sensorelemente > detektierbar sein müsste. > Da sich der Sensor ja nie mit einer konstanten Beschleunigung wie im > freien Fall bewegt. Du hast immer noch den gleichen Denkfehler drin wie oben schon, indem du die Bezugssysteme durcheinanderbringst bzw. unbedacht von einem Bezugssystem in ein relativ dazu beschleunigtes wechselst. Durchdenke nochmals das Experiment "Klötzchen auf Schaukel" und warum es nicht umkippt oder runterfällt!
Johann L. schrieb: > Durchdenke nochmals das Experiment "Klötzchen auf Schaukel" und warum es > nicht umkippt oder runterfällt! Dreht sich die Schaukel um 360° ? @Johann L.: Könntest du bitte erläutern, wie du auf den a-Vektor gekommen bsit? Falls nicht, sollte stark davon ausgegangen werden, dass dieser falsch ist.
Bernd schrieb: > Johann L. schrieb: >> Durchdenke nochmals das Experiment "Klötzchen auf Schaukel" und warum es >> nicht umkippt oder runterfällt! > > Dreht sich die Schaukel um 360° ? Wenn sie sich um 360° drehen soll, geht das nicht, indem sie bei 90° losgelassen wird. Um einen Umschwunk zu erreichen muss Schaukel+Klötzchen eine hinreichend große Startgeschwindig mitgegeben werden. > @Johann L.: Könntest du bitte erläutern, wie du auf den a-Vektor > gekommen bsit? Es ist in kartesischen Koordinaten. der rw^2 Anteil ist aufgrund der Kreisbewegung, der g-Anteil geht auf die Erdbeschleunigung zurück. Es ist die a im Bezugssystem des Beobachters mit Ruhelage des Pendels bei 0°.
Angehängte Dateien:
{kind=link}
{kind=link}
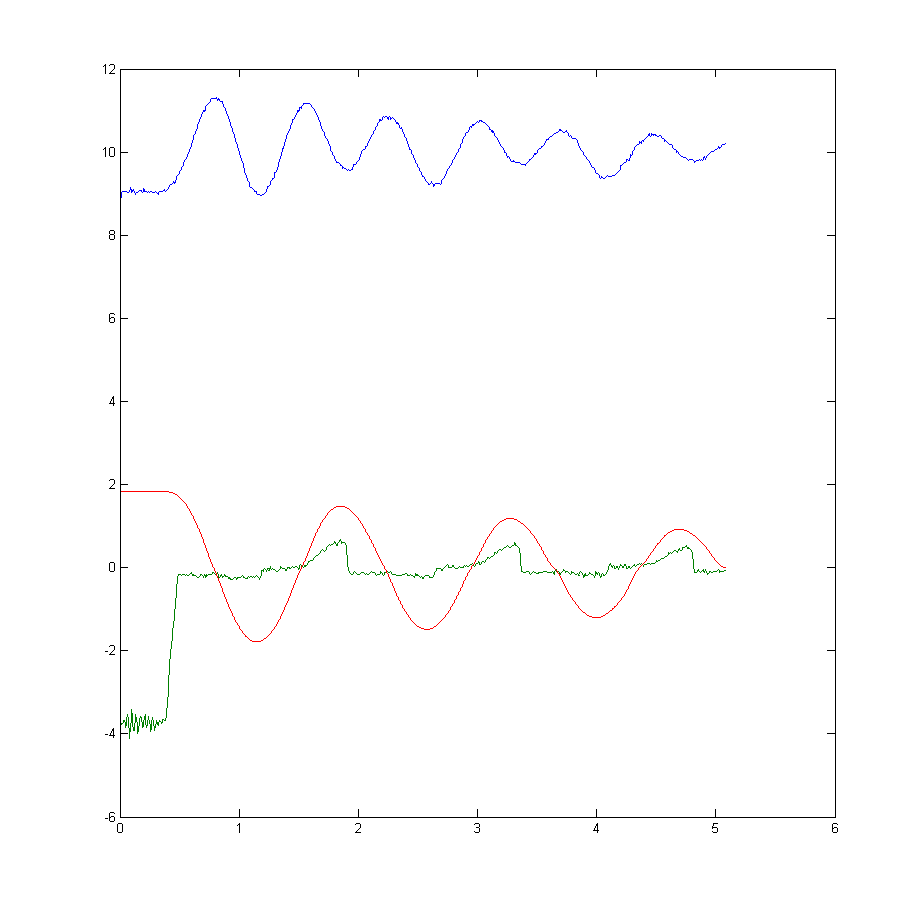
Hallo allerseits, ich weiß der Thread ist schon "ein wenig" angestaubt ;-), aber trotzdem vielen Dank Ich hatte das selbe Experiment und auch den selben zugrunde liegenden Denkfehler wie Yel, ohne diese Diskussion zu kennen Mein Ergebnis verhielt sich genau wie von Johann beschrieben und ich dachte schon ich dreh langsam durch, weil ich nicht auf den Denkfehler kam. Das tückische daran war, dass er (der Sensor) zwar größtenteils 0g anzeigte, aber immer im Bereich der Maxima (Maxima lt. Berechnung der auftretenden Soll-Beschleunigungen über Winkel und Formel aT=-g*sin(phi(t))) kleine periodische "Rampen" im Signal vorkamen (wahrscheinlich von Reibung, da uns beim Testen aufgefallen war, dass das Pendel eine starke Dämpfung aufwies bzw. durch das Massenträgheitsmoment, da es sich beim Pendel um einen Profilträger handelte), die ich mir vor dem Durchlesen dieses Threads nicht erklären konnte. Signale sahen wie im Diagramm aus (grün war Achse in Tangentialrichtung, blau die in Radialrichtung und rot war der berechnete Beschl.-verlauf zufolge des Auslenkungswinkels (welcher über Videoanalyse ermittelt wurde)) Danke nochmals Leute
Vielleicht noch ein kleiner Zusatz, falls es sich wer ansieht; wieso pendelt die Radialbeschleunigung um g? Da ja keine äußeren Kräfte im losgelassenen Zustand wirken - wie können da Beschleunigungen größer g auftreten?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.