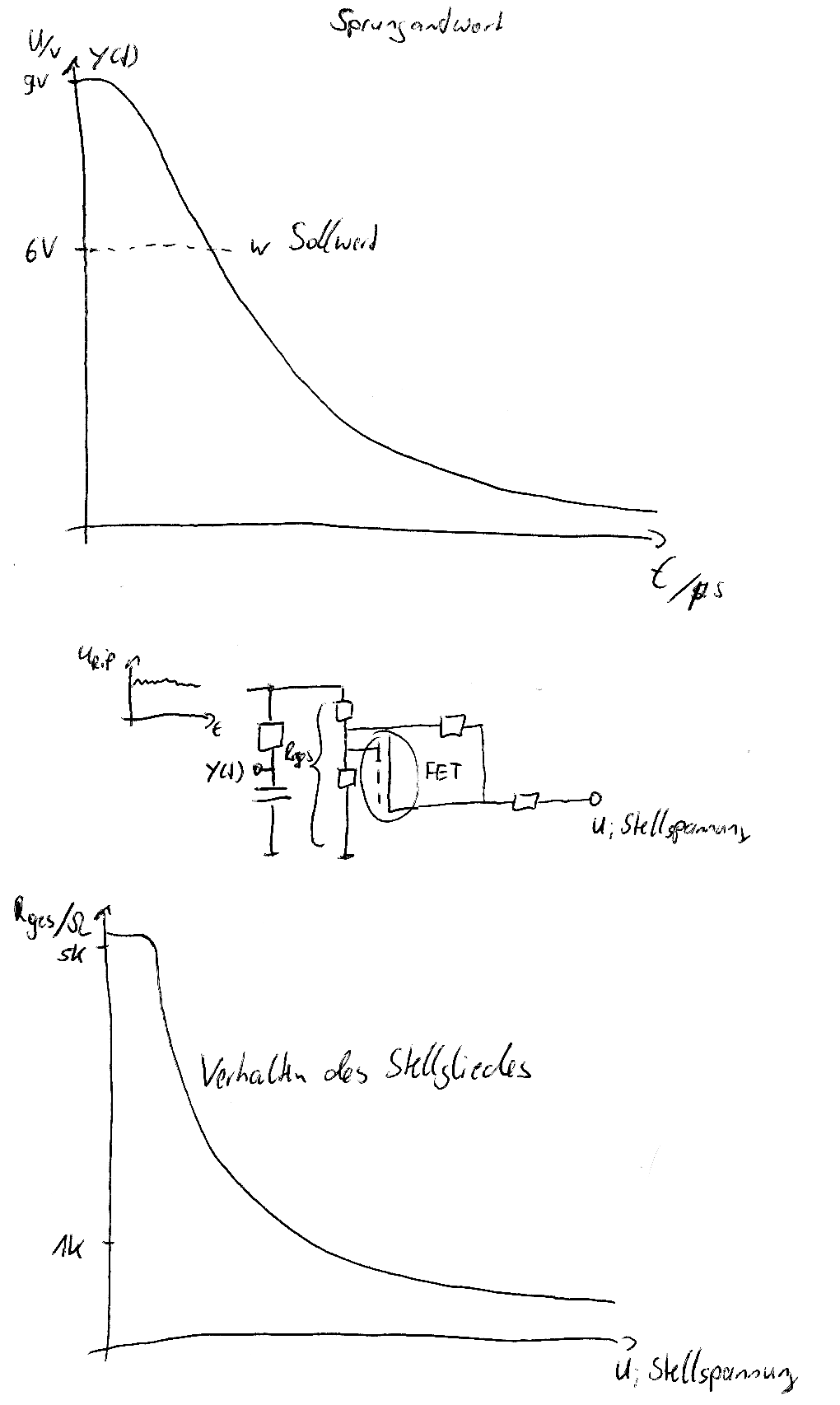
Hallo an alle, ich habe im Anhang eine Sprungantwort einer Regelstrecke. Diese Regelstrecke besteht aus einem FET als Stellglied, der als steuerbarer Widerstand funktioniert. Dieser Widerstand liegt parallel zum Ist-Wert Geber, der aus einem RC Integrator besteht. Lege ich an dem Stellglied Eingang die Sprungantowrt an, erscheint die Antwort y(t) als abklingende Kurve. Der Sollwert w soll 6V betragen. Jetzt habe ich allerdings ein großes Problem diesen Fall einzustufen. In der Literatur sieht man immer Sprungantworten die von 0 starten. An diesen werden dann die Paramter der strecke indentifiziert. Nur meine Strecke startet für t=0s nicht bei 0V sondern bei 9V. Welches Verfahren zur Identifikation wäre da sinnvoll? Ausserdem bin ich mir da nicht sicher, ob ich die Sprungantowrt richtig aufgenommen habe, in der Literatur wird ja auf den Sollwert w "hingesprungen". Muss ich also meine Sprungfunktion so wählen, das ich den Sollwert w=6V nur erreiche, ohne unterschreiten von diesem Wert? mfg und Danke im voraus
Angehängte Dateien:
-

sprungantwort_mod.png
32 KB
Ich sehe den "Sprung" in der Ansicht nicht. Sprungantwort heißt, Sollwert springt (oder auch Störgröße springt) und Stellgröße wird untersucht. Wie ist die Frage? guude ts
Es gibt "sprungfähige" Systeme. Diese starten nicht unbedingt bei 0V. Alle anderen haben eine integrierende Charakteristik, heißt also, dass der Ausgang erst langsam ansteigt. "stationäre Genauigkeit" heißt, dass der Ausgangspegel irgendwann auf dem Eingangspegel liegt. Hast du hier offensichtlich nicht! Die Frage in dem Zusammenhang: Was ist der Ausgang. Du hast ja nur die Stellgröße u aufgetragen, oder? Im Übrigen heißt "Regeln", dass man Sollwert und Istwert vergleicht, um daraus Maßnahmen abzuleiten. Ansonsten spricht man von "Steuern". Fazit: bitte nochmal das System erklären. - Was soll geregelt werden (Strecke)? - Was ist die Regeleinrichtung? - Was ist der Ausgang der Strecke? - Wo wird diese Ausgangsgröße y mit dem Sollwert w verglichen? - Welche Größen hast du skizziert grüße
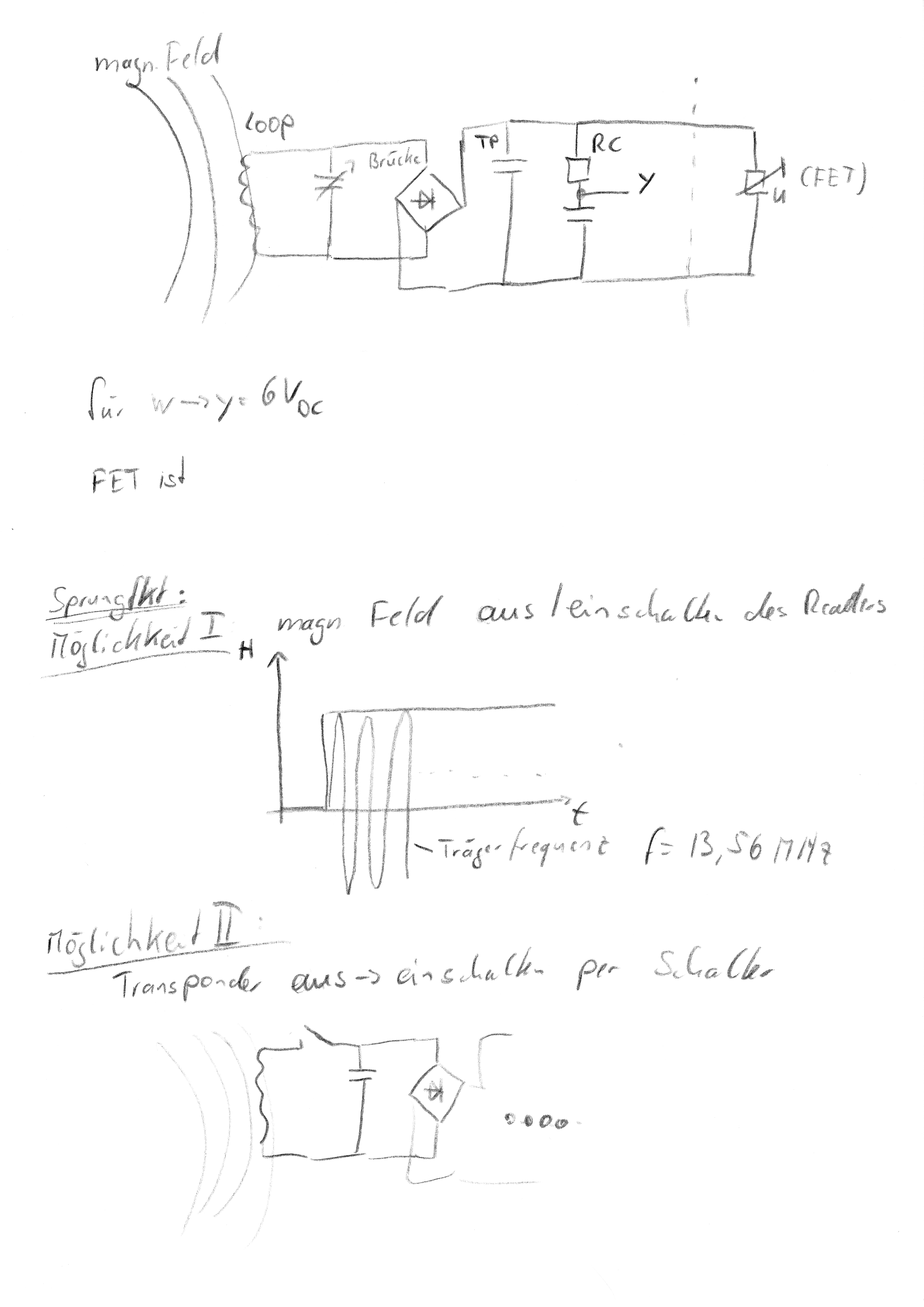
Hallo Thomas, uf... ich hau mir vor den Kopf. Man merkt,ich bin kein Regelungstechniker:-) Richtig, ich muss den Sprung auf die Stellgröße ausführen. Ich hab den Sprung an das Stellglied gelegt...urgs! Ok, das ändert so einiges... Diese Schaltung sorgt für eine gleichbleibende Belastung eines magnetischen RFID Feldes das vom Reader erzeugt wird. In dieses Feld kommt eine Transpondernachbildung und richtet das Wechselfeld gleich und an dem RC Glied, soll über dem Kondensator eine Spannung von 6V_DC stabil stehen, egal wie stark die momentane Feldstärke ist. Dafür soll der einstellbare Widerstand (FET) sorgen. Jetzt kann ich als Sprung ja keine normale Sprungfunktion nehmen? Da das System induktiv gekoppelt ist, ist eine normale Sprungfunktion ja nichts aussagend. Ich müsste die Trägerfrequenz dann mittels Sprungfunktion ein/ausschalten? Hat jmd eine andere Idee, wie ich diese Verhalten der Schaltung beschreiben kann? mfg
Regler schrieb: > Hat jmd eine andere Idee, wie ich diese Verhalten der Schaltung > beschreiben kann? Poste doch einfach mal die Gesamtschaltung mfg
Angehängte Dateien:
-

aufbau.png
64 KB
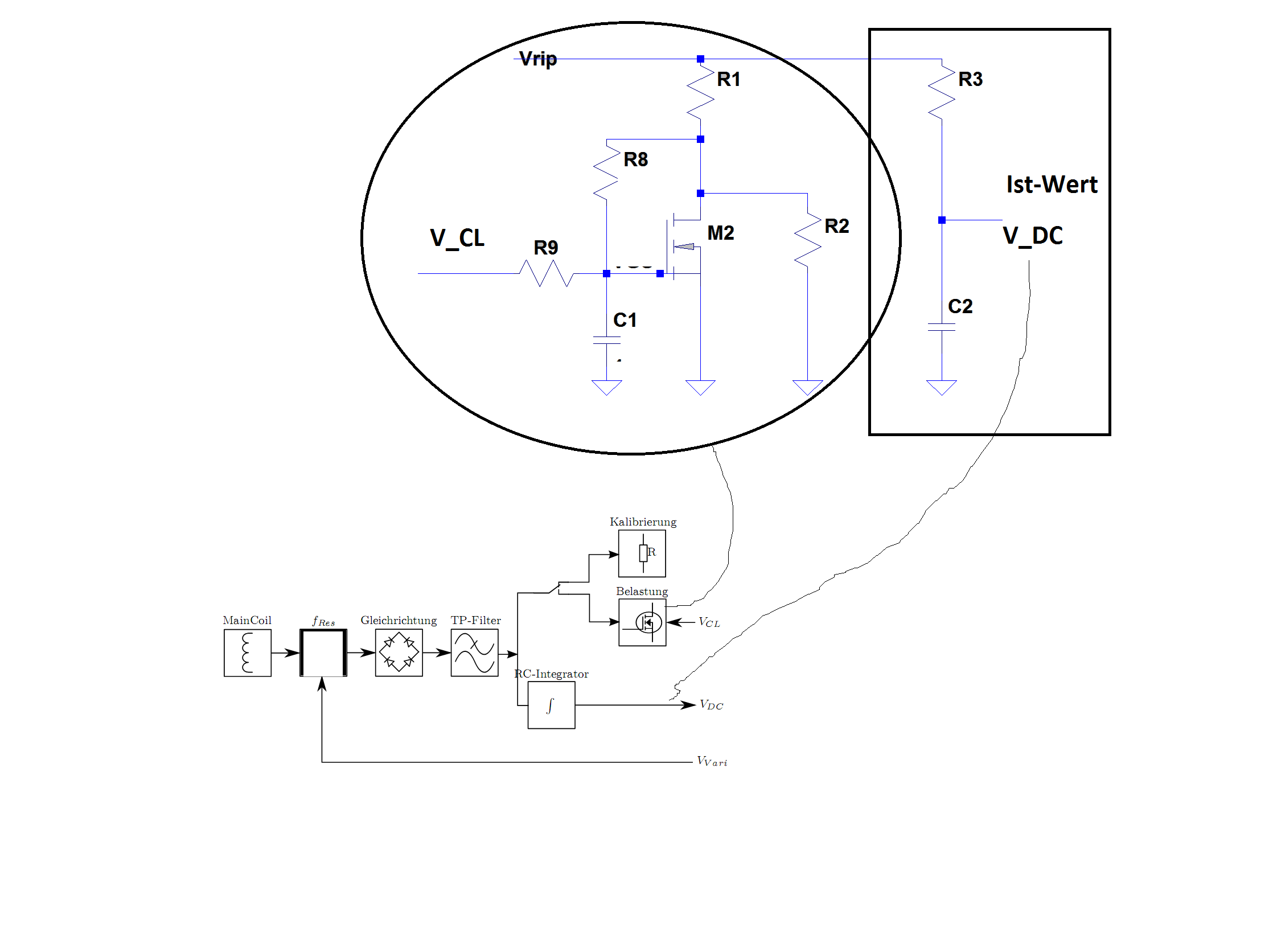
Ok, meine gesamt Schaltung ist im Anhang. Leider bin ich jetzt nicht in der Lage sie besser zu skizzieren. Aber folgendes wird getan: magn wechselfeld->Schleifenantenne->Resonanzfrequenz abgleich->Gleichrichtung->TP->RC Integrator Schalter steht auf "Belastung". In der Skizze meines Anfangsthread habe ich zwei Fehler drin, daher den Schaltplan oben bitte vergessen. Nun muss ich doch, um die Sprungantwort des Systems zu ermitteln, die Sprungfunktion mittels Fkt Generator irgendiwe anbringen. Da alleine die Kopplung schon einen Bandpass darstellt, dann die beiden RC Glieder.. ohohhhhhhhhh. Bin da für jede hilfe offen. mfg
wie gesagt: system beschreiben! deine Ausgangsgröße y ist die RC-Spannung U deine Sollgröße w ist die gewünschte Spannung = 6V und genau da setzt deine Anregung an. Das Feld selbst ist eine Störgröße und kann nicht gesteuert werden. Höchstens gemessen. Schaffst du es, den Transponder, während er im Feld ist, "anzuschalten", entspricht das meiner Meinung nach der Änderung von w von 0V auf 6V und damit einer Sprunganregung. Meine Meinung ^^
Also so ganz kann ich Deinen Gedanken immer noch nicht folgen. Du hast einen abstimmbaren Resonanzkreis, die Spannung daran wird gleichgerichtet und tiefpassgefiltert. Diese Spannung nennst Du dann V_DC. (Istwert) Davon soll dann eine Spannung abgeleitet ist, die konstant 6 Volt beträgt. ( Unabhängig von der Feldstärke. Auch bei Feldstärke = 0 ) ? Stimmt das ? Ist das dann die Spannung über R2 ? Bedeuted V_CL den Stellwert ? mfg
Angehängte Dateien:
-

aufbau2.png
390 KB
Danke danke, ich merke es wird schwierig und haarig. Anbei nochmals die Schaltung. Tatsächlich kann ich sagen, dass das Feld eine Störgröße ist (hab ich bisher noch nicht so betrachtet). Damit w auf 6V sich einstellt, muss ich die Schaltung ja entweder belasten, sprich den FET so einstellen, das er eine Belastung darstellt, die im Einschaltmoment den Wert y nur bis w erreichen lässt. Oder unbelastet eine Position im Feld finden, die mir ohne Belastung den Wert w erreichen lässt? Das Feld kann schon gesteuert werden. Durch die Induktive Verkopplung transformiert sich die Schaltung als Impedanz in den Antennenschwingkreis des Readers. Als Regler soll ein digitaler selbstgeschriebener Regelalorithmus (PID) zum Einsatz kommen. Mit einer Abtastung von 2,5µs+Rechenzeit. Es funktioneirt bereits ein Regler, indem nur der I-Anteil aktiv ist. Da ich aber einige Verbesserungen durchführen muss, ist es unabdingbar das System zu verstehen. Daher muss ich jetzt das nachholen, was ich vorher durch einfaches Testen der Parameter erreicht habe. Nagut, nun ist es so.. :-) Desweitern setzt ich ja den FET als Stellglied ein, dieser hat ja alles andere als ein lineares Verhalten. muss jetzt mal selbst nochmals scharf überlgen, was hier Ursache und Wirkung ist
Ich gehe davon aus, dass das eine Art AutomaticGainControl werden soll. Als Modulationsart wird vermutlich ASK verwendet. Träger EIN := Bit = 1; Träger AUS := Bit = 0. (oder umgekehrt) Ist es das Ziel die Bits zu decodieren, unabhängig vom Kopplungsgrad. ( D.h. unabhängig von der geometr. Position Sender / Empfänger) natürlich nur in einem gewissen räumlichen Bereich. Bin ich richtig mit dieser Annahme ? mfg
R. M. schrieb: > Also so ganz kann ich Deinen Gedanken immer noch nicht folgen. > > Du hast einen abstimmbaren Resonanzkreis, die Spannung daran wird > gleichgerichtet und tiefpassgefiltert. > Diese Spannung nennst Du dann V_DC. (Istwert) > > Davon soll dann eine Spannung abgeleitet ist, die konstant 6 Volt > beträgt. > ( Unabhängig von der Feldstärke. Auch bei Feldstärke = 0 ) ? > Stimmt das ? > > Ist das dann die Spannung über R2 ? > > Bedeuted V_CL den Stellwert ? > > mfg Richtig: Ist-Wert=V_DC Sollwert: w=6V an V_DC - Als Stellglied wird eine FET Schaltung genommen http://www.mikrocontroller.net/attachment/78177/aufbau.png, diese soll den Wert V_DC=w=6V halten. - Dieser FET wird über die Spannung V_CL gestellt. - Spannung über R2 ist primär nicht von interesse, R2 ist nur der Widerstand der parallel zum r_ds Widerstand (Bahnwiderstand) vom FET liegt. Jetzt passiert folgendes, steigt die Feldstärke so erhöht sich auch V_DC. Mit dem einstellbaren Widerstand soll eine höhere Belastung auf das Feld dann ausgeübt werden (FET wird niederohmiger), solange bis V_DC=w=6V sich einstellt. Fällt die Feldstärke, soll der Widerstand des FET erhöht werden. Das Feld wird weniger belastet und es erhöht sich die Spannung von V_DC wieder auf w. Dies ist die Kette die dahinter steckt. Aber ich muss erstmal die Sprungantwort der Messkarte herausfinden. Dazu hat Armin schon einige Hinweise mir geben können. mfg
R. M. schrieb: > Ich gehe davon aus, dass das eine Art AutomaticGainControl werden soll. > Als Modulationsart wird vermutlich ASK verwendet. > Träger EIN := Bit = 1; Träger AUS := Bit = 0. (oder umgekehrt) > > Ist es das Ziel die Bits zu decodieren, unabhängig vom Kopplungsgrad. > ( D.h. unabhängig von der geometr. Position Sender / Empfänger) > natürlich nur in einem gewissen räumlichen Bereich. > > Bin ich richtig mit dieser Annahme ? > > mfg > > > > > Nein :-) So funktioniert zwar nahezu RFID, aber das ist hier alles im unmodulierten Zustand. Würde ich auf das modulierte Feld hin Regeln, würde ich ungewollt eine Lastmodualtion durchführen. Das will ich nicht. Der Reader kommt in einem Testmode und nur die Trägerfrequenz wird emittiert. Auf dieses Feld Regel ich mich ein. Es soll KEINE Regelung auf das modulierte Signal stattfinden. Sondern, in dem Testmode kann das Feld mit der Messkarte "abgefahren" werden und die Messung kann erfolgen. Das geht aber nur unter der Bedingung das ich mit V_DC=6V gleichbleibende Bedingungen schaffe. mfg
Ok, jetzt hab ichs kapiert. Das Regelungsziel ist es, dass der Reader immer eine konstante Last "sieht". Eine wirklich interessante Aufgabenstellung. Wenn Du die HF des Reglers ein - und ausschalten kannst, sollte das doch Deine Sprunganregung darstellen. Oder sehe ich das zu einfach ? mfg
> Wenn Du die HF des Reglers ein - und ausschalten kannst, > sollte das doch Deine Sprunganregung darstellen. sorry, sollte heissen: Wenn Du die HF des Readers ....
R. M. schrieb: >> Wenn Du die HF des Reglers ein - und ausschalten kannst, >> sollte das doch Deine Sprunganregung darstellen. > > sorry, sollte heissen: > Wenn Du die HF des Readers .... ^^Schon klar :-) Danke R.M. Ja, ein nettes Diplomthema ist das. :-) Das mit dem "eine definierte Last sehen" ist auf den Punkt gebracht. Genau das ist das Bestreben. Ich habe als Testaufbau eigentlich keinen Reader, da die je nach Hersteller/Modell unterschiedliche Randbedingungen liefern, die nicht nachvollziehbar sind. Daher kann ich einen Testaufbau (eigentlich für ein anderens Thema) nutzen, indem ich einen Funktionsgenerator nehme und dort eine spezielle Kalibrationsspule anschließe. Diese Kalibrationsspule bietet mit immer eine gleichbleibende Umgebung mit einem definierten Abstand zur Messkarte. Als Ausgabe des Fktgenerators wäre meine Idee jetzt ein 0%->100% amplitudenmodullierte 13.56MHZ Sinus-Schwingung. Dies entspräche dem aus/ein schalten des Readers. Dann nehme ich den Verlauf des Ist-Werte auf. Dabei muss ich es erreichen, das ich bei y=w=6V den Endzustand erreiche. Nun ist hier eine weitere Frage die sich da auftut: Wie bekomme ich es hin, ohne Belastungsregelung, den Wert von w zu erreichen? Eigentlich nur, indem ich die Amplitude des Funktionsgenerators so einstelle, da sich der Wert w einstelle. mfg und danke
Mir ist gerade folgendes eingefallen: Wie wärs den mit einer 6Volt - Zenerdiode parallel zum C , anstelle des FETs ? Muss jetzt weg, schaue heut abend wieder ins Forum. mfg
Angehängte Dateien:
-

sprungantwort_auf_z.png
21 KB
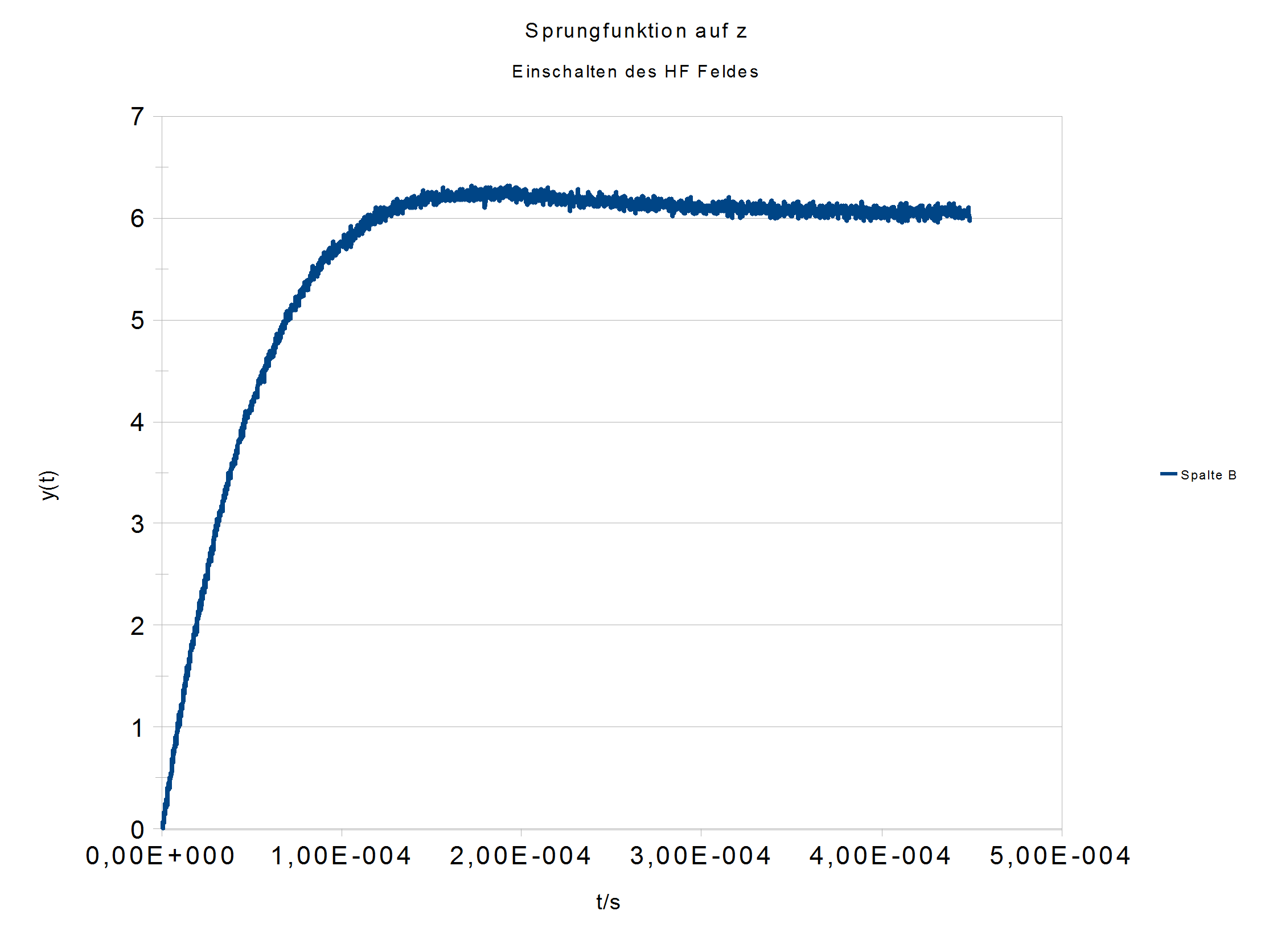
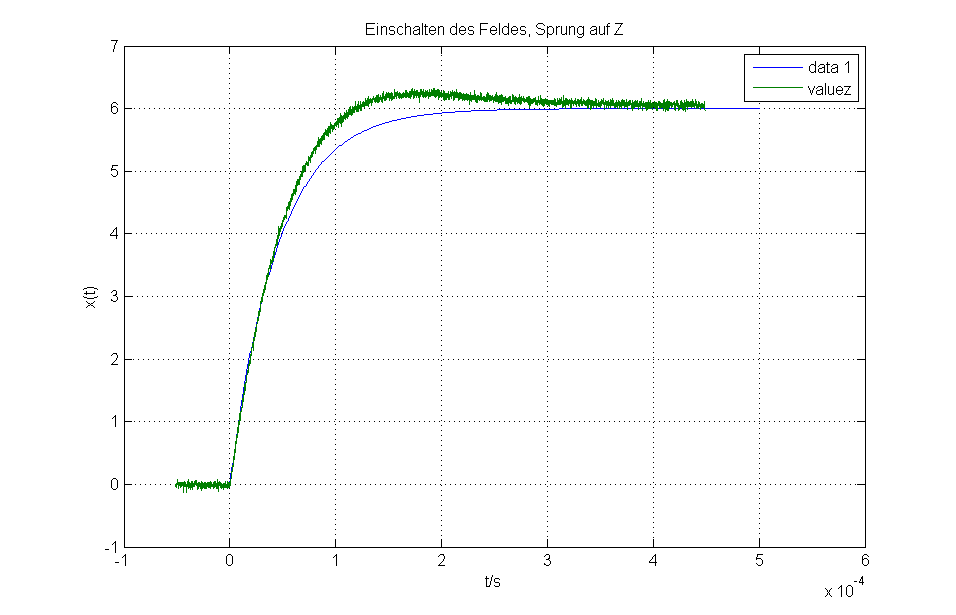
Hallo, da bin ich wieder. Ich habe im Anhang die Antwort von y auf die Sprungfunktion von z. Jetzt muss ich daraus die Zeiten Tu und Tg anschauen. Ich nehme als Grundlage eine PT2 Strecke und ermittle mir damit die Zeiten. Für Sollwert w=6V angedacht. Was kann ich da noch rausziehen für Informationen? Ahja, die Sprungfunktion hatte eine Höhe von ca. 10V. Habe ich das erstmal richtig verstanden? Wie geht man dann weiter?? Wird eine Reglerfunktion aufgestellt, die optimiert auf die Störfunktion z ist? mfg
Quark. Ich meinte das ist die Antwort von x auf die Sprungfunktion auf die Störfunktion z. mfg
Nochmals. Ich habe mit den Verhältnissen von T80%/T10% aus dem Skript von http://www.fh-oow.de/fbi/we/el/eg/DOWNLOAD/PRT/PRT_Skript_WS_06_07_Kap_1_Kap_2.pdf auf Seite 18 folgende Polstellen berechnet. p1,p2=-0,515+-j0,856 also linksseitig real mit konjungiert komplexen Polstellen. Also ist es stabil. Ich frage mich wo bekomme ich diese Tabellen her, von Seite 19? Wie heissen diese Tabellen und ich benötige dazu Quellen. mfg
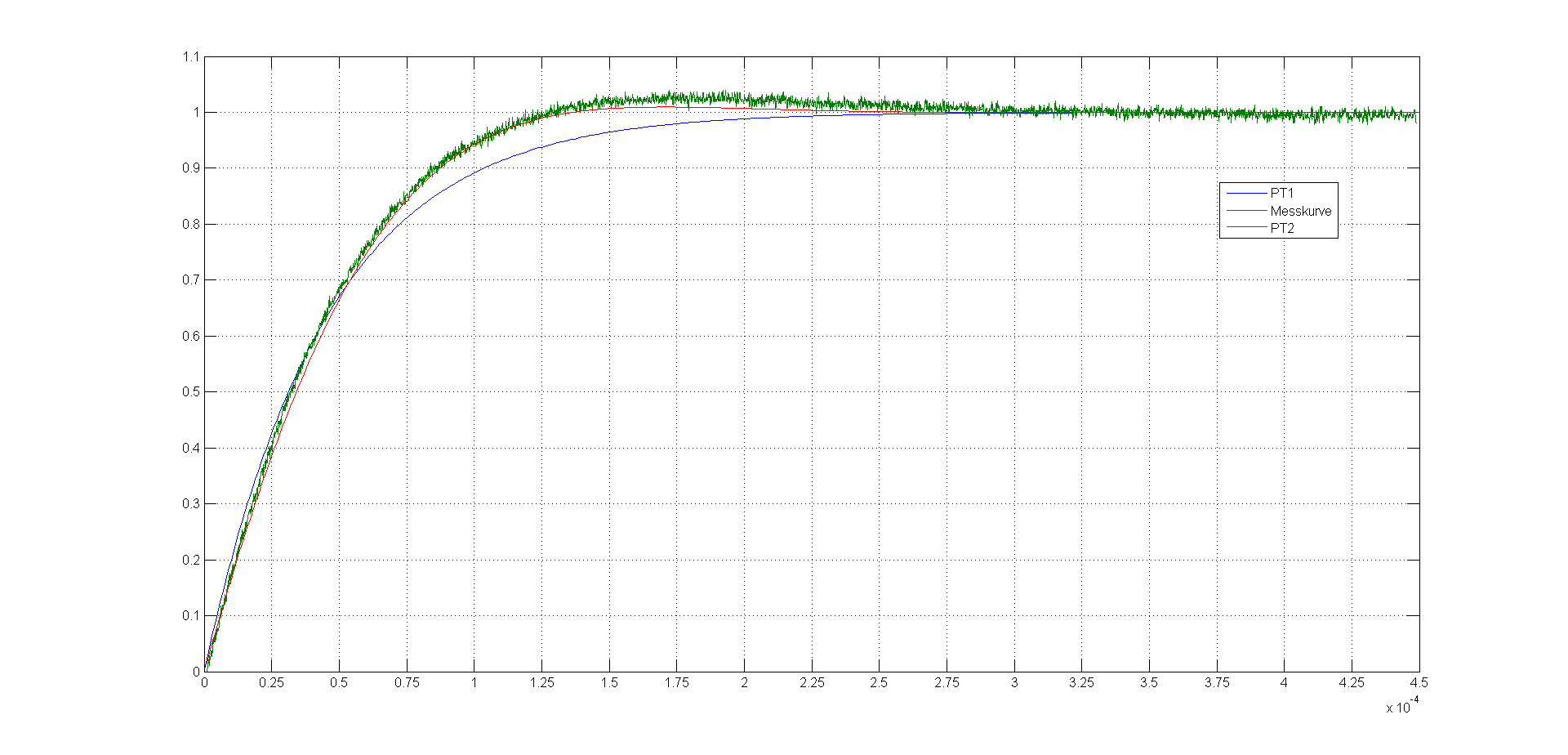
ich weiß nicht, ob du mit einem PT1-Glied nicht vllt besser fährst. Der Grund: Ein PT2-Glied beginnt mit einer Steigung von 0, bei deinen Messwerten springt die erste Ableitung der Antwort sofort auf einen Wert ungleich 0. Wenn du mit einem PT1-Glied rechnest, fallen deine Schwingungen zwar weg, aber die unmittelbare Antwort ist sauber an deinen Messwerten. Musst du je nach Verwendungszweck Abwägen. Vielleicht die Rechenergebnisse einfach mal in die Grafik mitreinplotten. Was diese Diagramme in eurem Skript angeht: So etwas gibt's bei uns an der Uni nicht, deswegen kann ich dir den google-Suchbegriff auch nicht sagen. Das ist aber sicher aus einer allgemeinen Rechnung entstanden: da hat jemand versucht, eine Art PT2-Kennzahl aus diesem Verhältnis zu bauen - wie man im Diagramm b) sieht, hat das nicht ganz geklappt (Zusätzlich zum Verhältnis braucht man noch den genauen Wert von T80%). Grundsätzlich kannst du immer die Sprungantwort nehmen und daraus eine Übertragungsfunktion konstruieren. Das methodische Vorgehen: 1. Sprungantwort h(t) annähren (da gibt's jede Menge Rechnerwerkzeuge) 2. Sprungantwort einmal ableiten: Impulsantwort g(t) = h'(t) 2. g(t) in Laplacebereich transformieren: Übertragungsfunktion G(s) je nachdem, wie genau man nähert, kann man die Übertragungsfunktion beliebig kompliziert gestalten. Was klug ist, hängt von dem Sinn hinter der ganzen Sache ab, den wir glaub ich noch nicht kennen. grüße
Angehängte Dateien:
-

sprungantwort_auf_z2.png
4,6 KB
Nabend Armin, ok. Ich habe die Funktion als PT1 angenähert, im Anhang ersichtlich mit der Funktion:
Nur wieso kann ich jetzt den Überschwinger weglassen? Ist das nicht ein markantes Merkmal dieser Strecke? mfg
ich weiß nicht.. Ist das Rauschen nicht auch markant? Wie hoch ist die geforderte Genauigkeit? Hast du Bauteile im Transponder, die bei 6,01V zerstört werden? Dann schon. Worauf ich hinaus will: Kommt drauf an, wo das Ganze hinführen soll. Sollst du wirklich nur das Verhalten charakterisieren? Dann frag nach, warum :D
Das Rauschen ist nicht wichtig. Es wird eh mit einem Multimeter gemessen, es ist kein "wahrer" Transponder sondern nur ein physikalisches Äquivalent zum messen. Meine Strecke besteht ja aus mind. zwei speicherfähigen Systemen: 1. LC Eingangsschwingkreis 2. RC Glied Ich versuceh gerade was vernünftiges mit der Formel von Wiki herauszubekommen http://de.wikipedia.org/wiki/Regelstrecke, aber mit den Kennwerten habe ich zu große Überschwinger, wenn ich die Sprungantowrt in den Zeitbereich wieder zurücktrnasformiere. Ab wann gelten denn eigentlich die Regelungstechnikformeln? Ich bin ja im µs Bereich, ich lese ja immer was von relativ langsamen System in der RGT. mfg
Regler schrieb: > Meine Strecke besteht ja aus mind. zwei speicherfähigen Systemen: > > 1. LC Eingangsschwingkreis > 2. RC Glied okay. Man sieht ja auch, dass der PT1-Charakter nicht genügt, um das System genau zu beschreiben (Überschwinger werden nicht abgebildet). Vermutlich hast du sogar noch weitere Effekte, an die im Moment keiner denkt. Möglich wäre da z.B. eine Rückwirkung über das Feld auf das Lesegerät, das irgendwie mit einer unbekannten Charakteristik irgendwas nachregelt! Du misst ja Regler und Strecke gemeinsam durch. Meine Aussage war bloß: PT1 ist in machen Situationen möglicherweise besser geeignet als PT2. Wenn du kein Standardglied nimmst, sondern eine allgemeine Beschreibung, kommst du näher hin - hast aber mehr Aufwand und vielleicht keinen Gewinn dadurch. Regler schrieb: > Ich versuceh gerade was vernünftiges mit der Formel von Wiki > herauszubekommen http://de.wikipedia.org/wiki/Regelstrecke, aber mit den > Kennwerten habe ich zu große Überschwinger, wenn ich die Sprungantowrt > in den Zeitbereich wieder zurücktrnasformiere. Welche Formel? Waswo? Die Sprungantwort hast du im Zeitbereich gemessen. Was hast du transformiert? Bitte nochmal erklären - steh grad auf der Leitung Regler schrieb: > Ab wann gelten denn eigentlich die Regelungstechnikformeln? Ich bin ja > im µs Bereich, ich lese ja immer was von relativ langsamen System in der > RGT. Diese Formeln kommen aus der Systemtheorie - das hat in dem Sinn noch nichts mit Regelungstechnik zu tun, sondern ist eher Vorarbeit. Dass man erst nach der Auslegung des Reglers anfängt zu rechnen/messen, sollte doch wohl eher selten vorkommen ;) Grundsätzlich gelten die Formeln in allen Zeitskalierungen, da sie idealisiert sind. Probleme gibt's dann erst bei der Umsetzung in der Realität: jetzt tritt plötzlich Rauschen auf; die Nichtrealisierbarkeit von idealen Differenzierern; zusätzliche Schaltverzögerungen;... Das alles lässt sich aber wieder mit der selben Theorie berechnen - wenn man denn alles berücksichtigt, was im konkreten Fall wichtig ist.
Angehängte Dateien:
-

sprungantwort_auf_z3.png
14 KB
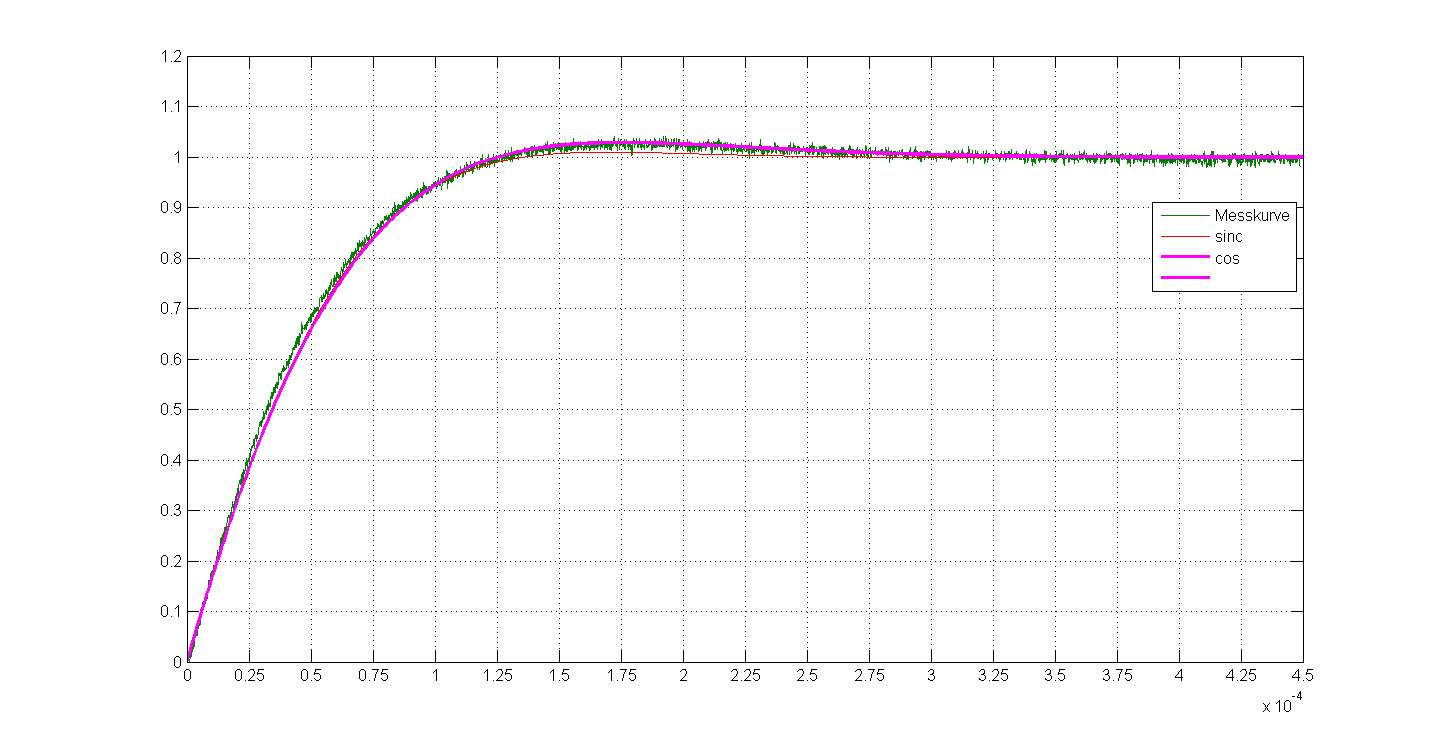
Danke Armin für die Aufklärung. Ich habe bei Wiki das hier gemeint: http://de.wikipedia.org/w/index.php?title=Datei:Sprungantwort_t2-schwingungsglied.png&filetimestamp=20080218163712 habe da aber nichts vernünfiteg herausbekommen. Danach habe ich nochmal von dem Skript http://www.fh-oow.de/fbi/we/el/eg/DOWNLOAD/PRT/PRT_Skript_WS_06_07_Kap_1_Kap_2.pdf die Seite 20 "PT2 Strecke, stark überschwingend" herangezogen. Habe mir meine Funktion erstellt mit den Kennwerten, transformiert und geplottet. Dann etwas an den Werten geschruabt und siehe da, wie im Bild zu sehen, habe ich zumindest eine gute Zeitfunktion die der originalen Messkurve doch sehr ähnelt. mit dem Skript bekomme ich folgende Kurvenparamter :
und
Als Funktion habe ich die normale PT2 Funktion
umgestellt nach
ergibt das
Aus einer Korrespondenztablle habe ich die Funktion so tranformiert:
Nur ging das nicht und ich habe sie etwas abgeändert, das es passte:
wobei ich als
und
"herausgefunden" habe. Meine errechneten Werte waren
und
. Aber ich musste noch in den Nenner *t reinnehmen. Das ist mir nicht ganz ersichtlich woher der Term kommt, genauso wie das 1+-e^... Wo kommt das +1 und die negative Multiplikation her? Ich würde diese Funktion PT2(t) jetzt wieder aus dem Zeitbereich in den Laplace Bereich transformieren und damit meine
Funktion also, meine Störfunktion erhalten, oder? mfg und vielen Dank
Ja es ist schon spät. Es entsteht also eine sinc Funktion mit
. Urgs, wie kann man das transformieren? mfg
Richtig, hatte ich vergessen: Wenn die beiden Polstellen der PT2-Übertragungsfunktion konjugiert komplexe Werte mit negativem Realteil annehmen, ist die Steigung am Anfang ungleich 0. Das ist wohl der Fall, der in eurem Skript "stark schwingungsfähig" heißt. Ist alles schon ein Bisschen her - reine Theorie merkt man sich halt doch nicht so gut... ^^ Insofern gefällt mir dein x(t) schon sehr gut Was hältst du aber davon, eine Gleichung der Form x(t) = 1 - Exp[-a*t]*Cos[b*t] oder ähnlich zu verwenden? Damit kommst du auf den Anfangswert x(0) = 0 Das schafft in deinem Fall auch der sinc - hat aber nichts mehr mit einem PT2-Glied zu tun, wegen dem zusätzlichen t im Nenner! Der Sinc lässt sich wohl nicht so leicht in den Laplacebereich transformieren. Habe dafür noch keine Lösung gesehen. Bedenke auch, dass du die Sprungantwort erst einmal differenzieren musst, bevor du über die Laplacetransformation zur gesuchten Übertragungsfunktion zurückrechnen kannst. Wenn du beim PT2-Glied bleibst, geht's deutlich leichter (Standardformeln ausm Skript?) Bleibt noch eine Frage: Regler schrieb: > genauso wie das 1+-e^... Wo kommt das +1 und die negative Multiplikation her? Mehrere Erklärungen: 1. die Sprungantwort ist NICHT die Transformierte der Übertragungsfunktion beim Ableiten fällt die 1 raus und die Vorfaktoren ändern sich nochmal! 2. Das PT2-Glied ist ein DGL-System 2. Ordnung: y'' + M1*y' + M0*y = u Wenn du das mit konstantem u anregst (z.B. Sprunganregung), entsteht diese Konstante y = u/M0 als inhomogene Lösung. In deinem Fall also die 1. Der Rest ist ein "Einschwingvorgang". Den kannst du aus der homogenen DGL berechnen y'' + M1*y' + M0*y = 0 aber das lernt man denk ich auch auf der FH :P piesack naja, dürfte ohnehin nicht nötig sein ^^
Also sry schon einmal falls es nicht ganz zu dem passt was du suchst, ich hab jetzt nicht alles durchgelesen. Aber zu der Ubertragungsfunktion
gehört die Übergangsfunktion
Ich weiss nur nicht was das dir bringt. Für den Reglerentwurf nimmst du doch eh die Übertragungsfunktion... Hoffe das hilft dir weiter, falls nicht - vergiss einfach was ich geschrieben hab.
Ach so, du musst Partialbruchzerlegung machen um die Übertragungsfunktion in den Zeitbereich zurück zu bringen
Angehängte Dateien:
-

sprungantwort_auf_z4.png
8,6 KB
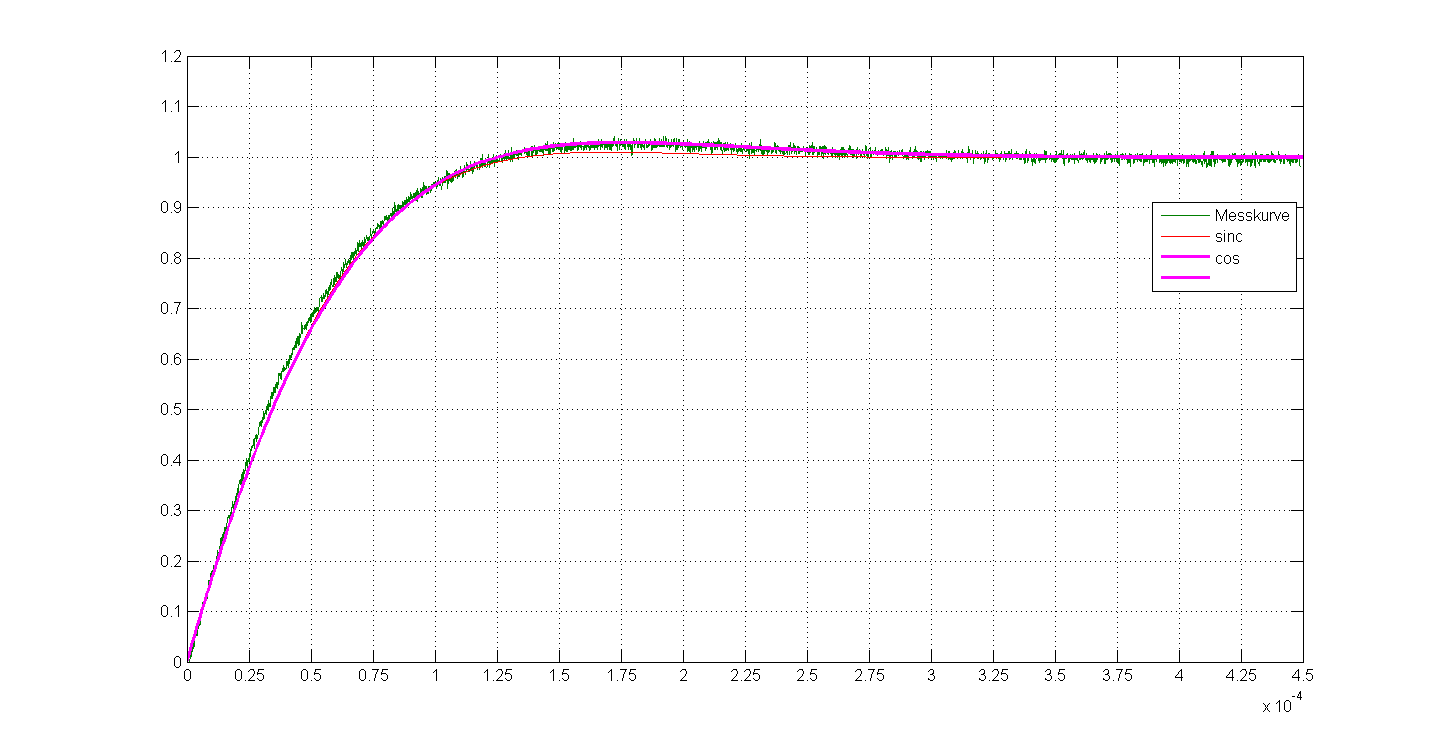
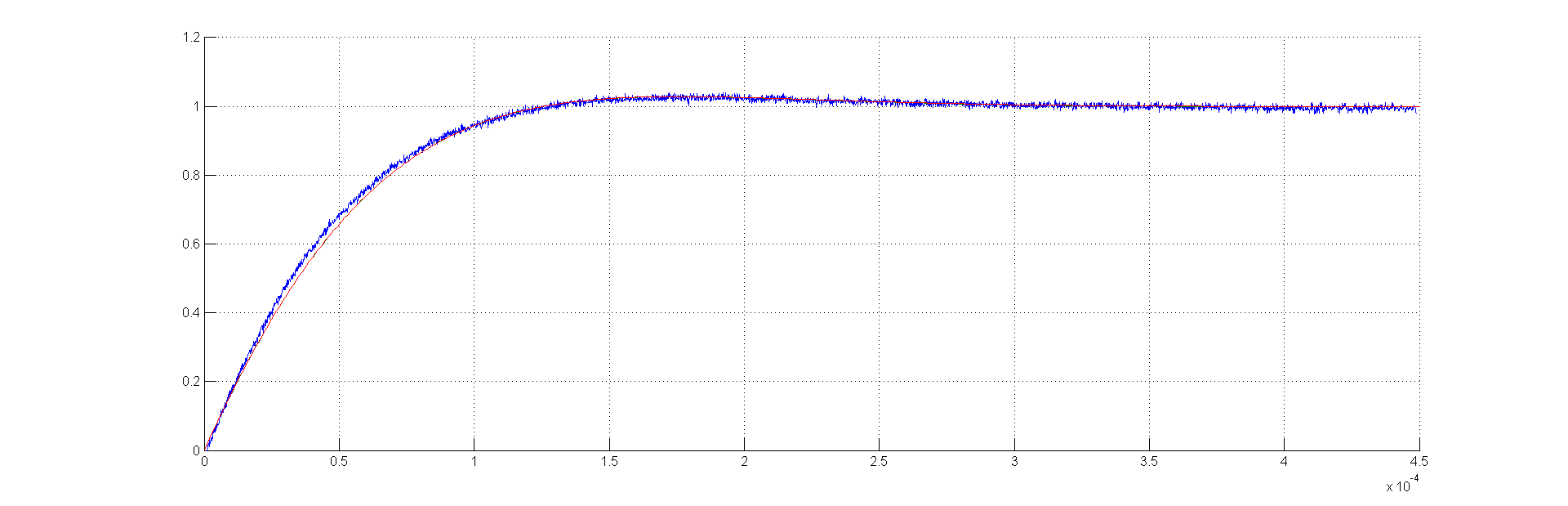
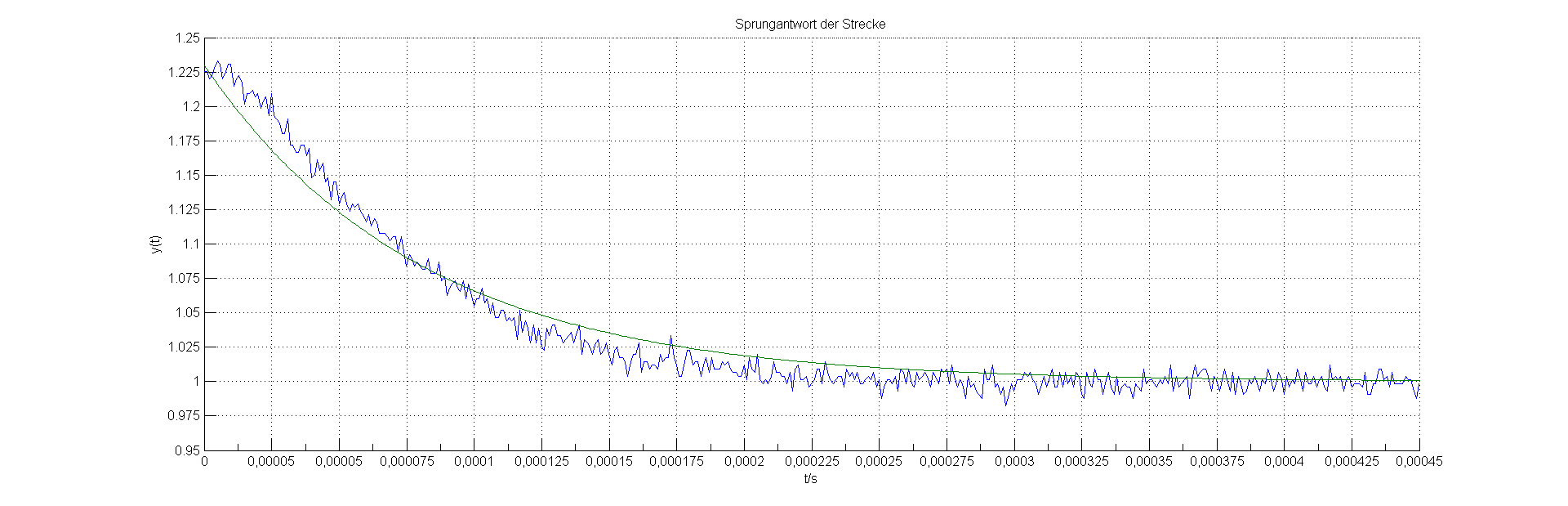
Hallo Armin, danke mit dem Hinweis mit der cos Funktion. Das Bild im Anhang bestätigte deine Vermutung, das die cos Funktion um einiges besser ist. Tatsächlich hat mich das mit der sinc Funktion auch irritiert. Die Funktion mit dem cos sieht nun wie folgt aus:
Ich habe mich da halbwegs angenähert wobei ich
von oben beibehalten habe. Jetzt bin ich aber echt durcheinander. Ja, wir hatten DGl und ja ich habe sie auch rechnen können. Aber, ich komme nicht aus der RGT, sondern eigentlich aus der HF :-) Nur, hat sich in der DA herausgestellt, das die RGT mein Kernthma sein wird. :-( So muss ich da jetzt durch und sehe es als sportliche Herausforderung. Wenn ich mir diese Zeitfunktion ansehe und in eine Laplace Tabelle schaue, dann steht doch dort eine ganz andere Bildfunktion. Das hat doch nichts mehr mit einem reinen PT2 Verhalten zu tun? Bildfunktion von (x) ->
Und eingesetzt:
ergibt das meine Störfunktion? Diese ist beschreibene Funktion des sprunghaft eingeschalteten HF-Feldes? mfg
Hallo Armin, danke mit dem Hinweis mit der cos Funktion. Das Bild im Anhang bestätigte deine Vermutung, das die cos Funktion um einiges besser ist. Tatsächlich hat mich das mit der sinc Funktion auch irritiert. Die Funktion mit dem cos sieht nun wie folgt aus:
Ich habe mich da halbwegs angenähert wobei ich
von oben beibehalten habe. Jetzt bin ich aber echt durcheinander. Ja, wir hatten DGl und ja ich habe sie auch rechnen können. Aber, ich komme nicht aus der RGT, sondern eigentlich aus der HF :-) Nur, hat sich in der DA herausgestellt, das die RGT mein Kernthma sein wird. :-( So muss ich da jetzt durch und sehe es als sportliche Herausforderung. Wenn ich mir diese Zeitfunktion ansehe und in eine Laplace Tabelle schaue, dann steht doch dort eine ganz andere Bildfunktion. Das hat doch nichts mehr mit einem reinen PT2 Verhalten zu tun? Bildfunktion von (x) ->
Und eingesetzt:
ergibt das meine Störfunktion? Diese ist beschreibene Funktion des sprunghaft eingeschalteten HF-Feldes mit der Antwort von x? mfg
Angehängte Dateien:
-

kunstwerk.PNG
1,3 KB
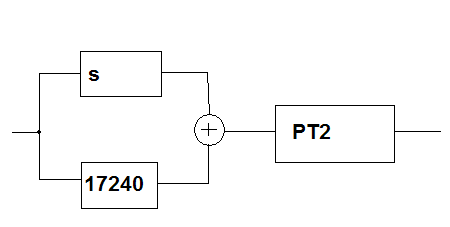
ohja du hast recht. das ist kein reines PT2-Glied - den Nenner könnte man zwar binomisch ausmultiplizieren, der Zähler hat aber noch einen zusätzlichen Summanden s. Du kannst das jetzt aber auseinander ziehen: s entspricht einem Differenzierer (D-Glied) der 2. Summand ist ein Konstanter Vorfaktor (P-Glied) Beides wird in ein PT2-Glied mit 1 im Zähler geschickt. siehe auch: großes Paint-Kunstwerk Je nachdem, wie es weiter gehen soll, sehe ich 2 Gefahren: 1. Die Faktoren sind zum Teil sehr groß, evtl lohnt es sich, die Glieder umzusortieren um in Digitalberechenungen oder Nachbauten nicht in irgendwelche Begrenzungen zu kommen. 2. Ein reines D-Glied ist nicht unbedingt in HW realisierbar - für Berechnungen aber noch zu gebrauchen
Angehängte Dateien:
-

sprungantwort_auf_z4.png
8,6 KB
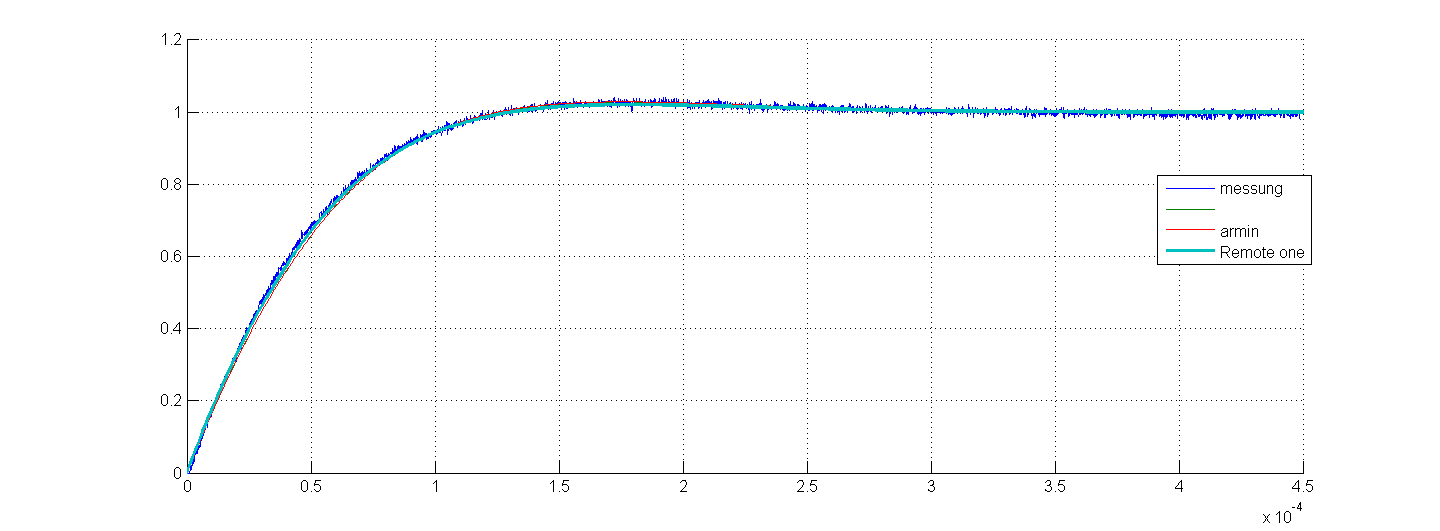
Ich habe mich angemeldet. So, BITTE die letzten beiden Beiträge von mir vergessen. Hallo Armin, danke mit dem Hinweis mit der cos Funktion. Das Bild im Anhang bestätigte deine Vermutung, das die cos Funktion um einiges besser ist. Tatsächlich hat mich das mit der sinc Funktion auch irritiert. Die Funktion mit dem cos sieht nun wie folgt aus:
Ich habe mich da halbwegs angenähert wobei ich
von oben beibehalten habe. Jetzt bin ich aber echt durcheinander. Ja, wir hatten DGl und ja ich habe sie auch rechnen können. Aber, ich komme nicht aus der RGT, sondern eigentlich aus der HF :-) Nur, hat sich in der DA herausgestellt, das die RGT mein Kernthma sein wird. :-( So muss ich da jetzt durch und sehe es als sportliche Herausforderung. Wenn ich mir diese Zeitfunktion ansehe und in eine Laplace Tabelle schaue, dann steht doch dort eine ganz andere Bildfunktion. Das hat doch nichts mehr mit einem reinen PT2 Verhalten zu tun? Bildfunktion von (x) ->
Wobei u(t) meine Sprunkfunktion ist, also das eingeschaltete HF Feld. Und eingesetzt:
ergibt das meine Störfunktion? Diese ist beschreibene Funktion des sprunghaft eingeschalteten HF-Feldes? mfg --edit Die 1 verschwindet, weil..? Ableitung der verketteten Funktion x(t)? Stehe auf dem Schlauch, meine Zeitfunktion x(t) (hier verkettet) muss ich erst ableiten und dann nach Laplace transformieren? mfg2
Jetzt wird's grad durcheinander, und ich bin auch hart unkonzentriert. Also nochmal von vorne. Deine Sprungantwort h(t) lautet so: http://www.wolframalpha.com/input/?i=Plot[1-Exp[-17240*t]*Cos[12500*t],{t,0,0.0005}] Das wird erstmal abgeleitet, um zur Impulsantwort g(t) zu kommen: http://www.wolframalpha.com/input/?i=Plot[d/dt[1-Exp[-17240*t]*Cos[12500*t]],{t,-0.0001,0.0004}] Um auf die Übertragungsfunktion zu kommen, muss das ganze in den Bildbereich: http://www.wolframalpha.com/input/?i=LaplaceTransform[d/dt[1-Exp[-17240*t]*Cos[12500*t]]] Das ist jetzt das, was du immer Gz(s) nennst. Glücklicherweise stimmt mein oben gezeichnetes *.png noch, weil man das so umformen kann, dass ein Form k*(s+a)/PT2-Nenner rauskommt: http://www.wolframalpha.com/input/?i=FullSimplify[(17240+(s%2B17240))/((s%2B17240)^2%2B156250000)%2B156250000/((s%2B17240)^2%2B156250000)+] z.B. der zweite Term unter "Results" Eine Summe im Bildbereich bedeutet immer eine Summe der Glieder Ein Produkt im Bildbereich bedeutet immer eine Hintereinanderschaltung von Gliedern
Gibt es eigentlich einen Grund, warum du nicht auf "Remote One (remote1)" hörst. Wenn du eine PT2 Approximation machen willst, was hier die Beste Wahl ist und wie du es ja auch schon gemacht hast, dann nimm die von Remote One genannten Hinweise zur Rücktransformation an. Das was du hier augenscheinlich machst, ist einfach nur "raten". Das geratene Ergebnis willst du dann auf biegen und brechen in den Bildbereich bringen. So funktioniert das auf gar keinen Fall. Such dir eine geeignete Approximationsmethode, wie z.B. Zeit-Prozentkennwert-Verfahren. Dann hast du bereits deine Übertragungsfunktion und benötigst keine Rücktransformation. Einige Approximationen sind auch bei Wikipedia beschrieben: http://de.wikipedia.org/wiki/Regelstrecke#Systeme_h.C3.B6herer_Ordnung
ATler schrieb: > funktioniert das auf gar keinen Fall. Such dir eine geeignete > Approximationsmethode, wie z.B. Zeit-Prozentkennwert-Verfahren. Dann > hast du bereits deine Übertragungsfunktion und benötigst keine > Rücktransformation. Ich habe die Zeit-Prozentkennwert Methode bereits ausprobiert. Doch habe ich als µ=t10%/t90% einen Wert von µ=0,0658 Dieser Wertebereich taucht nirgends auf, die Tabellen fangen erst mit µ=0,2 an. Daher war meine erfolge Berechnung und Fehler zu groß mfg
Dann probier das Wendetangentenverfahren: http://books.google.de/books?id=taQRBjeo4gAC&pg=PA349&dq=Wendetangentenverfahren&hl=de&ei=IgcBTLvzHMilOJaM2dYE&sa=X&oi=book_result&ct=result&resnum=1&ved=0CCkQ6AEwAA#v=onepage&q=Wendetangentenverfahren&f=false
ATler schrieb: > Dann probier das Wendetangentenverfahren: > http://books.google.de/books?id=taQRBjeo4gAC&pg=PA349&dq=Wendetangentenverfahren&hl=de&ei=IgcBTLvzHMilOJaM2dYE&sa=X&oi=book_result&ct=result&resnum=1&ved=0CCkQ6AEwAA#v=onepage&q=Wendetangentenverfahren&f=false Habe ich auch schon versucht. Nur das Prblem liegt darin, das ich nicht wirklich eine Tangente habe. Die Zeit Tu fehlt mir :-) mfg
Dann probier eine Approximation nach Radtke. Und schau dir noch einmal die Zeitprozentwertmethode an http://books.google.de/books?id=taQRBjeo4gAC&pg=PA361&dq=zeitprozentwerten&cd=1#v=onepage&q=zeitprozentwerten&f=false Die Tabelle im Lutz/Wendt ist evtl. etwas genauer. Es wird aber auf jeden Fall keine Zeitfunktion an deine Sprungantwort approximiert!!!!!
Es ist gut möglich, dass Tabellen für manche dieser Verfahren keine Einträge für solche schnellen Vorgänge haben. Die Zeitprozentwertmethode scheint mir nicht für Glieder mit einer Anfangssteigung ungleich 0 gedacht zu sein. Da kann ich mich auch täuschen - bin nur kurz drübergegangen... Wenn dir die Transformation und das Zerlegen in mehrere Glieder keinen Spaß macht und du dieses System lieber in ein bekanntes PT2-Glied umrechnen möchtest, kannst du natürlich auch die Formel von Remote One für h(t) verwenden. Hast dann aber drei Unbekannte, die du festlegen musst (T, omega, D). Ob du mit einem systematischen Verfahren oder durch "ausprobieren" an die Kenngrößen kommst, musst du selbst wissen. Tatsächlich lesen sich "anerkannte" Verfahren schöner in einer DA. Andererseits: wenn das Ergebnis stimmt und du "gezielter Parametervariation" und "grafischer Kontrollvorgang" schreibst statt "Ausprobieren", kann man das auch ganz gut verkaufen, denke ich ^^
Es wäre auch besser einfach mal die "Verstärkung" hoch zu nehmen. Dadurch bekommst du ein deutlicheres Überschwingen und einen besseren Abklingvorgang in der Sprungantwort. Dadurch wird das approximieren sichtlich vereinfacht. Dann kannst das übliche Verfahren anwenden: http://books.google.de/books?id=taQRBjeo4gAC&pg=PA349&dq=Wendetangentenverfahren&hl=de&ei=IgcBTLvzHMilOJaM2dYE&sa=X&oi=book_result&ct=result&resnum=1&ved=0CCkQ6AEwAA#v=snippet&q=identifikationskenngr%C3%B6%C3%9Fen&f=false
ATler schrieb: > Es wäre auch besser einfach mal die "Verstärkung" hoch zu nehmen. > Dadurch bekommst du ein deutlicheres Überschwingen und einen besseren > Abklingvorgang in der Sprungantwort. Dadurch wird das approximieren > sichtlich vereinfacht. > Dann kannst das übliche Verfahren anwenden: > http://books.google.de/books?id=taQRBjeo4gAC&pg=PA349&dq=Wendetangentenverfahren&hl=de&ei=IgcBTLvzHMilOJaM2dYE&sa=X&oi=book_result&ct=result&resnum=1&ved=0CCkQ6AEwAA#v=snippet&q=identifikationskenngr%C3%B6%C3%9Fen&f=false Ich habe aber kein Funktion, die Periodisch überschwingt. Sondern ich habe ein funktion die der xa2 von hier http://books.google.de/books?id=taQRBjeo4gAC&lpg=PA349&dq=Wendetangentenverfahren&pg=PA336#v=snippet&q=identifikationskenngr%C3%B6%C3%9Fen&f=true Seite 336 ähnelt. Nur dort steht nicht wie ich die Kennwerte herausbekomme.Oder seh ich das nur nicht? mfg
Kris Dis schrieb: > Ich habe aber kein Funktion, die Periodisch überschwingt. Sondern ich > habe ein funktion die der xa2 von hier > [link]http://books.google.de/books?id=taQRBjeo4gAC&lpg=P...] > ähnelt. Mal abgesehen davon, dass der Link anscheinend nicht auf die richtige Seite führt, hast du definitiv eine Übertragungsfunktion mit Überschwingen. Die Dämpfung ist nur so groß, dass das Überschwingen schnell wieder abklingt. Deswegen sollst ja auch die "Verstärkung" hochdrehen. Also statt einem Sprung von z.B. 1V nimmst du 5V (wenn mgl.).
nur noch ne kurze Randinfo: http://tinyurl.com/38q66gn Das ist eine PT2-Sprungantwort die aus deiner Schätzung mit Cosinus ohne Sinus entstanden ist: ich habe die Übertragungsfunktion berechnet und den s-Anteil im Zähler vernachlässigt, weil der etwa 4 Größenordnungen kleiner ist als der P-Anteil. Dadurch ist der Sinus-Anteil wieder in h(t) mit hineingekommen. Die Übertragungsfunktion lautet: 453467600 / ((s+17240)^2 + 12500^2) Ist aber wohl wieder zu weit von deinen Messwerten weg, oder?
Angehängte Dateien:
-

sprungantwort_auf_z5.png
8,1 KB
Hallo Armin, nein die Fkt sieht gut!! aus. Schau in den Anhang. Also, du hast den DAnteil weggenommen? mfg
ATler schrieb: > Kris Dis schrieb: >> Ich habe aber kein Funktion, die Periodisch überschwingt. Sondern ich >> habe ein funktion die der xa2 von hier >> [link]http://books.google.de/books?id=taQRBjeo4gAC&lpg=P...] >> ähnelt. > > Mal abgesehen davon, dass der Link anscheinend nicht auf die richtige > Seite führt, hast du definitiv eine Übertragungsfunktion mit > Überschwingen. Die Dämpfung ist nur so groß, dass das Überschwingen > schnell wieder abklingt. Deswegen sollst ja auch die "Verstärkung" > hochdrehen. Also statt einem Sprung von z.B. 1V nimmst du 5V (wenn > mgl.). Danke. Aber das ist nicht möglich. Mein Fkt generator hat schon die max Spannung herausgegeben. mfg
Kris Dis schrieb: > nein die Fkt sieht gut!! aus. Schau in den Anhang. Also, du hast den > DAnteil weggenommen? Bring die Übertragungsfunktion doch einmal auf die Normalform von Remote One. Du wirst sehen dass du das s^2 alleine brauchst --> also die binomische Formel ausmultiplizieren musst. Dann hasst du auch wieder deine Dämpfung. Sonst würde das auch nicht so schnell wieder abklingen. Also ausmultiplizieren und die s-Potenzen ausklammern unterm Bruchstrich.
ATler schrieb: > Kris Dis schrieb: >> nein die Fkt sieht gut!! aus. Schau in den Anhang. Also, du hast den >> DAnteil weggenommen? > > Bring die Übertragungsfunktion doch einmal auf die Normalform von > Remote One. Du wirst sehen dass du das s^2 alleine brauchst --> also die > binomische Formel ausmultiplizieren musst. Dann hasst du auch wieder > deine Dämpfung. Sonst würde das auch nicht so schnell wieder abklingen. > > Also ausmultiplizieren und die s-Potenzen ausklammern unterm > Bruchstrich. Gemacht. Und nu, di pq Formel herusfinden war jetzt nicht so schwer? mfg
Angehängte Dateien:
Habe jetzt die h(t) Funktion von Remote one genommen und eine heuristisch gezielte Parmatervariation durchgeführt. :-) T=60e-6s D=1.1 <---??? omega=12e3s^-1 Habe damit zwei komplex konjungierte Erhalten. s1,2=-9.16ks^-1+-j13.91ks^-1 Ist doch eine recht gute Näherung? Nur wenn ich jetzt die Werte rückrechne in den Bildbereich, bekomme ich zwar durch zwei Variblen die dritte heraus. Doch durch meine Parmaeterwahl ist die dritte Variable nicht gleich der errechneten Größe. mfg
Was auch immer du für eine Software verwendest - sie sollte das nicht plotten! Wenn D > 1, dann sind Teile des Ausdrucks nicht sichtbar weil imaginär - und zwar die gesamte Sinusschwingung (es dürften eigentlich nur einzelne Punkte dargestellt werden, in denen der Imaginärteil = 0 ist). Gefällt mir gar nicht :P Mit Werten D kleiner 1 kommst du nicht hin? Das sieht nämlich noch ein Stück präsziser aus, als mein Vorschlag... Auf der anderen Seite @Remote One: Meinst du nicht, dass im Nenner (1 + 2 D T s + T²s²) stehen müsste? Hab das irgendwie anderst in Erinnerung... :P Dann also zurück zu der Gleichung aus der TinyURL. Du fragst nach dem Vorgehen? 1. Ich habe deine Cosinusnäherung genommen:
1 | h(t) = 1-Exp[-17240*t]*Cos[12500*t] |
2. Die entsprechende Übertragungsfunktion berechnet (Verfahren wie oben)
1 | (17240*(s+17240)) / ((s+17240)^2+156250000) + 156250000 / ((s+17240)^2+156250000) |
3. Man sieht, dass im Zähler des linken Summanden das s einen Vorfaktor hat, der 17241 mal kleiner ist als der Vorfaktor von 1. Also hab ich's einfach weggelassen. 4. Die neue Übertragungsfunktion lautet also
1 | (17240*(0+17240)) / ((s+17240)^2+156250000) + 156250000 / ((s+17240)^2+156250000) |
oder
1 | (17240*(0+17240)) / ((s+17240)^2+156250000) + 156250000 / ((s+17240)^2+156250000) |
oder
1 | 453467600 / ((s+17240)^2+156250000 |
Das ist also ein sauberes PT2-Glied
1 | 453467600 / ((s+17240)^2+156250000 |
oder
1 | 453467600 / (s^2 + 34480s + 453467600) |
oder
1 | 1 / (s^2/453467600 + 34480s/453467600 + 1) |
Also Standardform mit 1 im Zähler und Polynom im Nenner =] sory, latex is anstrengend ^^
Angehängte Dateien:
-

sprungantwort_auf_z7.png
8,6 KB
Danke Armin, möp. Tatsächlich habe ich da oben was falsches berechnet. Ohmann, klaro wenn D>1, dann kommt da nur mumpits raus! Wioe blöd von mir.. Ok ich kann die nur bis dahin folgen: > 1. Ich habe deine Cosinusnäherung genommen: >
1 | h(t) = 1-Exp[-17240*t]*Cos[12500*t] |
> > 2. Die entsprechende Übertragungsfunktion berechnet (Verfahren wie oben) >
1 | (17240*(s+17240)) / ((s+17240)^2+156250000) + 156250000 / |
2 | > ((s+17240)^2+156250000) |
> > 3. Man sieht, dass im Zähler des linken Summanden das s einen Vorfaktor > hat, der 17241 mal kleiner ist als der Vorfaktor von 1. Also hab ich's > einfach weggelassen. Das bekomme ich nicht gerafft. Wieso die Laufvariable s wegnehmen? > 4. Die neue Übertragungsfunktion lautet also >
1 | (17240*(0+17240)) / ((s+17240)^2+156250000) + 156250000 / |
2 | > ((s+17240)^2+156250000) |
> oder >
1 | (17240*(0+17240)) / ((s+17240)^2+156250000) + 156250000 / |
2 | > ((s+17240)^2+156250000) |
> oder >
1 | 453467600 / ((s+17240)^2+156250000 |
> Das ist also ein sauberes PT2-Glied >
1 | 453467600 / ((s+17240)^2+156250000 |
> oder >
1 | 453467600 / (s^2 + 34480s + 453467600) |
> oder >
1 | 1 / (s^2/453467600 + 34480s/453467600 + 1) |
> Also Standardform mit 1 im Zähler und Polynom im Nenner =] > Jetzt weiss ich auch wie Wolfram Alpha geht :-) http://www.wolframalpha.com/input/?i=laplace+transfor+%5Bd%2Fdt+1-Exp%5B-17240%2At%5D%2ACos%5B12500%2At%5D%5D mit der alternativen Form
1 | 40*(431s+11336690))/(s^2+34480s+453467600) |
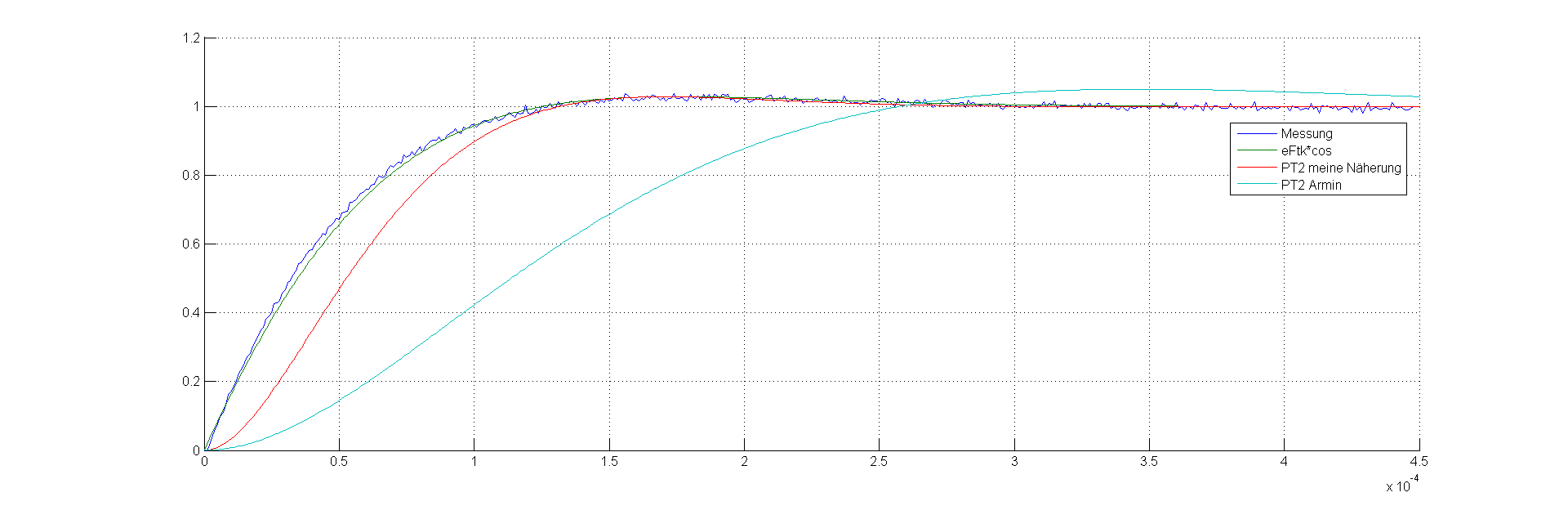
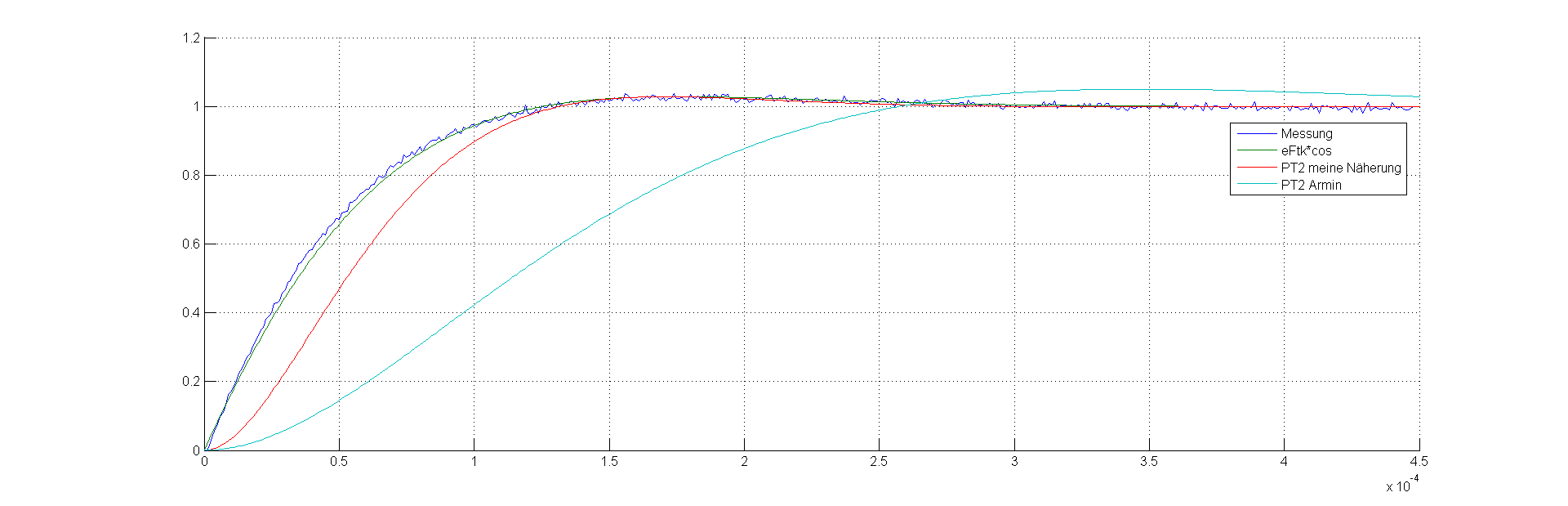
AHHHH, jetzt seh ich was du weggelassen hast. die 40*431s hast du weggelassen, aber wie gesagt, das ist doch eine s-Variable. Kann man die einfach so wegnehmen? Wenn ja, die Polstellen sind s1,2=-17240-+j12500, also wieder wie aus der Ursprungsformel eFkt*cos x(t). Ok, bei dir ist w0^2=156250000 und 2D*wo=34480, somit ist dann D=0.6896. Das kann ich nu wieder in die h(t) Form einsetzen und plotten (PT2 Armin). Ausserdem habe ich noch mit den Paramtern weiter rumgespielt (diesmal richtig :-) ) und meine PT2 Funktion hat dann folgende Werte: D=0.7513 T=35.896e-6s w0=1/T=27.858ks^-1 Ich denke ich kann mit meinen Werten gut leben. Die Approximation mit der eFkt*cos ist die beste Näherung, allerdings besitzt die keine Standartfunktion. Wird dann im Bildbereich deine "Wegoptimierung" durchgeführt um ein PT2 Verhalten zu erreichen und in t zurücktransformiert ergibt sich allerdings eine Zeitfunktion die zu weit weg ist von der realen Kurve (PT2 Armin Kurve). Danke dir Armin für deine Geduld!!!!!! Habe in den letzten zwei Tagen und nächten mehr von RGT verstanden als in 2 Semestern. Bin gerne für weitere Anregungen zu haben. In meiner Arbeit würde ich ahtl genau das schreiben "heuristische Approximation an die Messkurve durch itereative grafische Paramteroptimierung" :-)
alles klar, ich hatte mich schon gewundert, dass das ohne das s wirklich gut gehen soll - hat ja in deinem ersten Plot nach meinem "Randinfo"-Post echt gut ausgesehen. So wird eher ein Schuh draus. Wie man sieht, ist einfaches "Weglassen" nur der erste Schritt. Da muss dann schon noch weiter optimiert werden. du kannst dir jetzt raussuchen, ob dir das PT2-Verhalten (rot) genügt, oder ob du die Exp*Cos-Funktion nimmst (dunkelblau) und das damit bezahlst, dass du neben dem PT2-Glied noch ein PT2-Glied mit Differenzierer benutzt oder wie oben in meiner Paintskizze: Differenzierer und Vorfaktor addieren und das Ganze dann in ein PT2-Glied schicken.
Hallo Armin, deine Randinfo Funktion war sehr gut. Sie liegt genau drauf. Ich habe nochmals nachgedacht und ein D glied wäre durchaus sinnvoll. Die Schleifenantenne (=Induktivität ist ja ein D Glied, dann habe ich auch zwei RC Glieder, also I-Glieder (habe bisher immer nur ein erwähnt, sorry). Es stimmt schon. Somit ergibt sich ja ein s Term im Zähler und zwei im Nenner. Mein Ziel ist es eigentlich, eine möglichst einfache Beschreibung meiner Störfunktion zu erhalten und somit meinen Reler nach Tabellenparamtern zu programmieren. Wenn ich also das auf eine PT2 Strecke runterbrechen kann, vereinfacht das so einiges. Ich weis nicht ob man das so machen kann bzw ob es in der Praxis gemacht wird? mfg
Angehängte Dateien:
-

sprungantwort_auf_y.png
7,3 KB
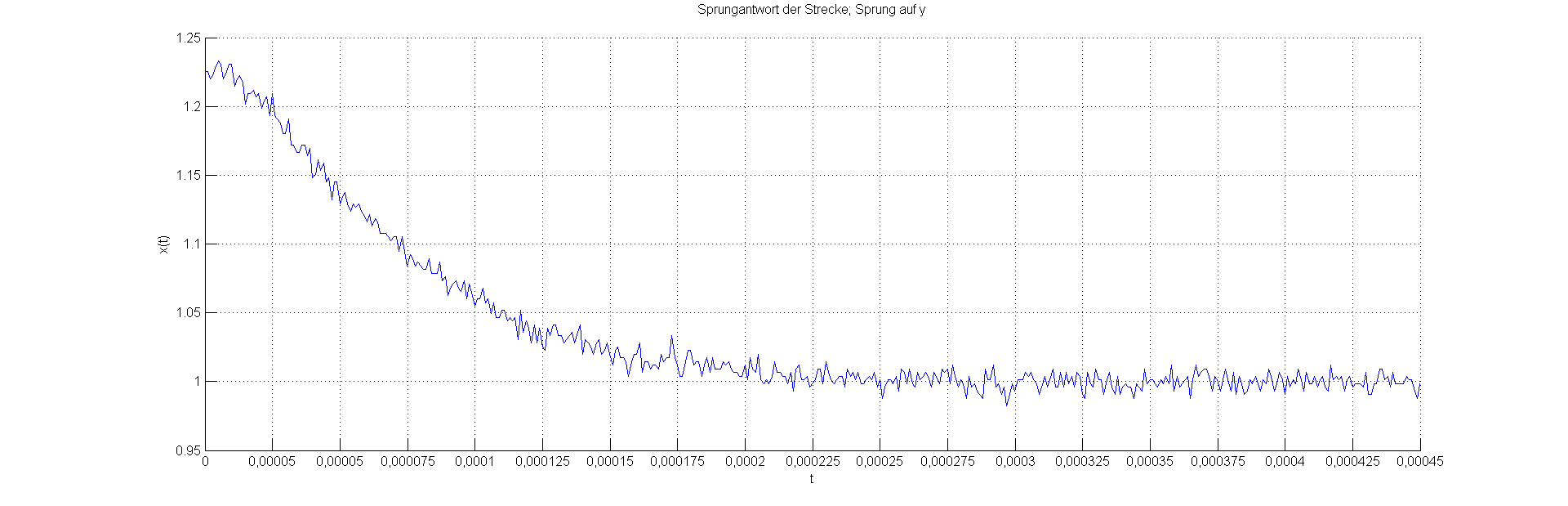
So, ich muss ja die Reglerfunktion aufstellen. Optimiert auf Störgrößenaufschaltung. Daher fehlt mir jetzt noch die Streckenübertragungsfunktion G_s(s). Diese habe ich im Anhang angehangen. Ein Sprung von 0 auf 4V wurde an y das Stellglied (FET) angelegt und die HF Feldstärke so eingestellt, das w=x=1V sich im Verharrungszustand einstellt. Jetzt habe ich halt das Problem, das das mal wieder kein Standartproblem ist. Sondern eine fallende Funktion. Ist jmd solch eine Streckenform bekannt? Für mich sieht es wie ein umgedrehtes PT1 Verhalten aus. Diese Strecke ist die G_s(s) Strecke. Mit der Störübertragungsfunktion G_zs(s) aus den obrigen Beiträgen bekomme ich dann die Reglerfunktion für die Störübertagungsfunktion G_z(s)? mfg
das sieht schon wieder stark nach deiner ersten Grafik aus :( Ich fürchte, das läuft wieder auf "probieren" heraus. Kris Dis schrieb: > Diese Strecke ist die G_s(s) Strecke. Mit der Störübertragungsfunktion > G_zs(s) aus den obrigen Beiträgen bekomme ich dann die Reglerfunktion > für die Störübertagungsfunktion G_z(s)? Versteh die Frage grad nicht. Ich dachte, wir hätten die ganze Zeit die Störübertragungsfunktion ermittelt? Reglerfunktion? Stehe gerade auf dem Schlauch. Man möchte meistens, dass die reine Reaktion auf Störungen nach einer gewissen Zeit wieder auf 0 abklingt, damit das geregelte System bei allen denkbaren Störungen möglichst ähnlich reagiert. Irgendwann. An den Regler stellt man außerdem weitere Anforderungen, was das Übertragungsverhalten angeht. Dazu gehören stationäre Genauigkeit (hinten kommt irgendwann das raus, was man vorn reingibt) und Stabilität (weder Ausgangsgrößen noch systeminterne Größen dürfen sich selbständig machen und über alle Grenzen anwachsen) und so weiter und so fort... Bis wir dahin kommen, muss ich aber nochmal das System genauer verstehen: Kannst du mir nochmal - ähnlich wie im bildchen http://de.wikipedia.org/wiki/Datei:Einfacher_regelkreis.gif - erklären, was die Ausgangsgröße y, die Stellgröße u, die Führungsgröße w ist? Was die Strecke ist und was der Regler? Sonst wird es am Ende schwierig, die verschiedenen G(s) richtig zusammenszuetzen. Ohne Rückführung keine Regelung. Und ohne Regelung keine Störunterdrückung. grüße
Angehängte Dateien:
-

sprungantwort_auf_z7.png
8,6 KB
Morgen Armin, ok. Kann es sein, das es je nach Autor andere Abkürzungen für Stör/Stellgröße usw gibt? Ich passe jetzt alls nach dem Wiki Bild an. w-Führungsgröße ->6V bzw 1 in den normierten Darstellungen u-Stellgröße ->VCL Steuerspannung für den FET d-Störgröße ->?? http://www.mikrocontroller.net/attachment/78763/sprungantwort_auf_z7.png y-Regelgröße ->VDC, Ist Wert Habe mir die Ohren um die Nacht gehauen und gelesen. Also, was ich jetzt kapiert habe, ist das ich Störgröße d nicht verstanden habe. Diese Funktion die wir oben über Tage entwickelt haben, nutzt mir erst dann was, wenn ich ein EXTRA Glied einbaue, welches mir die Störung kompensiert OHNE das der Regler was davon mit bekommt. Das braucht man nur DANN, wenn die Schaltung kaputt gehen würde. Da der einfache Regelkreis ja erst gegenregeln kann, wenn sich y bereits geändert hat. Irgendwie ist das logisch... :-) Mit andern Worten, das was wir ausgearbeitet haben, hat mir nur was für mein allgemeines Vertändnis gebracht. Daher trotzdem ein dickes DANKE! Das tut mir leid, das wir da jetzt Tage für verbraten habe! Aber die Erkenntnis kam mir jetzt erst nach dem dritten RGT Buch das ich lese. Was ich brauche ist nur ein Regler, der gutes Störungsverhalten besitzt, also d ausregelt. Eine Veränderung des Sollwertes w wird nicht vorkommen. Muss nicht schnell sein, aber dafür minimaler Fehler. Dafür reicht mir jetzt (nach meinem Verständnis) ein PID Regler mit gutem Störungsverhalten. Also ein einfacher Regelkreis. Im Anhang nochmal ein Bild. Dieses Bild ist die Sprungantwort (0..4V) der Regelstrecke. Also Sprung auf u und y(t) geplottet. Dabei die Feldstärke so eingestellt, das sich y auf w=1 einstellt. Dies wird also meine Sreckenübertagungsfunktion G_s(s). Das Problem das sich jetzt allerdings bietet, ist das sich je nach Feldstärke sich diese Strecke auch ändert. :-) Aber wie gesagt, mein Regler den ich habe funktioniert. Nur weis ich ja net wirklich wie. Also scheitn, das wohl kein Problem in der Praxis darzustellen. Ich habe die Strecke approximiert als eine Art umgedrehtes PT1 Glied.Die FKt lautet:
Wobei folgendes zu sehen ist, die Fkt klingt ab, stellt sich aber auf w ein. Ein D Glied hat mir da nicht geholfen. Daher meine eigene Funktion g(t). Auch hier müsste ich eher ein PT3 Verhalten sehen. Da die Umgebung 2xRC Gleider und ein LC Schwingkreis ja tgrotzdem vorhanden sind. Das alles soll dann in ein digitalen Regler rein. Ich stelle also alles im s Bereich auf, dann tranformiere ich in den z bereich unter berücksichtung der Abtast/Halteglieder also ein A/D und ein D/A Wandler. Die Rechenzeit vernachlässige ich. Meine Abtastrate liegt bei ca 35µs also einen kompletten Abtast->Berechnungs->Stellung Zyklus. Die Störgröße d ist eignetlich recht langsam, nur Handverschiebung der Messkarte im Feld. Der Sollwert w wird fest einprogrammiert. Der Fehler e somit per Software vom µC ermittelt. Ich hoffe ich konnte dich etwas erhellen, jedenfalls bin ich es jetzt auf jeden Fall. :-) mfg --edit, falsches Bild
also wir messen gerade die ungeregelte Strecke aus? Gut. die Reaktion des Ausgangs y(t) auf die Störung (Feldschwankungen) haben wir als PT2-Glied mit vorgeschalteter Summe aus Differenzierer und Produktglied identifiziert und die entsprechende Störübertragungsfunktion berechnet? Nun geht es daran, die Antwort des Ausgangs y(t) auf eine Anregung u(t) herauszufinden. Dazu hast du eine Sprungantwort aufgeschaltet und die Störung so eingestellt, dass der Ausgang auf y=1 steht? Dummerweise könnte es schwierig werden, die genaue Streckenübertragungsfunktion [nenne ich G(s)] zu ermitteln. Der Grund: Vielleicht ist der Zusammenhang zwischen y und d, u irgendwo nichtlinear. Wenn also beispielsweise in den zugrundeliegenden Gleichungen irgendwo ein Term u^2, d^2 oder u*d steht (was ich für sehr warscheinlich halte), existiert kein G(s) und auch keine Störübertragungsfunktion in dem Sinne. Dann wäre der richtige Schritt, einen Arbeitspunkt zu wählen und in diesem Arbeitspunkt zu linearisieren. Das ist genau das, was du gerade versuchst: d(t) auf einen Arbeitspunkt einstellen und die Sprunganregung in u(t) aufschalten. Gleichermaßen muss evtl. davon ausgegangen werden, dass sich die Störübertragungsfunktion für verschiedenartige u ändert (Nichtlinearität). Auf der anderen Seite haben wir ja einen Arbeitspunkt, nämlich y = 6V soll konstant sein. Zielführend wäre es also bei allen Messungen, die unbeteiligte Größe so einzustellen, dass der Ausgang auf 6V liegen kann. Wobei mir da für die Messung an u kein einleuchtender Wert für d einfällt. Die gesuchten Ergebnisse wären sehr hilfreich für den Entwurf des Reglers. Aber nicht, wenn du von Anfang an einen PID-Regler verwenden möchtest. Warum nicht einfach mit den 3 Werten des PID probieren, bis alles passt? Warum erst die Strecke analysieren und dann das Ergebnis nicht verwenden?
Boah, stimmt das was ich zwei post vorher gesagt habe? Ich muss mal ne Pause machen. Wird nur gutes Störverhalten verlangt muss ich doch die Störfunktion betrachten? Mit G_R(s)=G_Z(s)^-1-G_S(s)^-1 und bekomme dann: G_R(s)=s^2-s/2875+7.7611x10^8 Richtig?
Armin schrieb: > also wir messen gerade die ungeregelte Strecke aus? Gut. richtig, das ist das abklinende Signal. > die Reaktion des Ausgangs y(t) auf die Störung (Feldschwankungen) haben > wir als PT2-Glied mit vorgeschalteter Summe aus Differenzierer und > Produktglied identifiziert und die entsprechende > Störübertragungsfunktion berechnet? richtig. das haben wir vorher gemacht. > Nun geht es daran, die Antwort des Ausgangs y(t) auf eine Anregung u(t) > herauszufinden. Dazu hast du eine Sprungantwort aufgeschaltet und die > Störung so eingestellt, dass der Ausgang auf y=1 steht? richtig, das ist das abklinende Signal. y=w=1 > Dummerweise könnte es schwierig werden, die genaue > Streckenübertragungsfunktion [nenne ich G(s)] zu ermitteln. Der Grund: > Vielleicht ist der Zusammenhang zwischen y und d, u irgendwo > nichtlinear. Wenn also beispielsweise in den zugrundeliegenden > Gleichungen irgendwo ein Term u^2, d^2 oder u*d steht (was ich für sehr > warscheinlich halte), existiert kein G(s) und auch keine > Störübertragungsfunktion in dem Sinne. Dann wäre der richtige Schritt, > einen Arbeitspunkt zu wählen und in diesem Arbeitspunkt zu > linearisieren. > Das ist genau das, was du gerade versuchst: d(t) auf einen Arbeitspunkt > einstellen und die Sprunganregung in u(t) aufschalten. Genau! siehe Bild > Gleichermaßen muss evtl. davon ausgegangen werden, dass sich die > Störübertragungsfunktion für verschiedenartige u ändert > (Nichtlinearität). > Jup. > Auf der anderen Seite haben wir ja einen Arbeitspunkt, nämlich y = 6V > soll konstant sein. Zielführend wäre es also bei allen Messungen, die > unbeteiligte Größe so einzustellen, dass der Ausgang auf 6V liegen kann. > Wobei mir da für die Messung an u kein einleuchtender Wert für d > einfällt. > ??Nicht verstanden. > > Die gesuchten Ergebnisse wären sehr hilfreich für den Entwurf des > Reglers. Aber nicht, wenn du von Anfang an einen PID-Regler verwenden > möchtest. > Warum nicht einfach mit den 3 Werten des PID probieren, bis alles passt? > Warum erst die Strecke analysieren und dann das Ergebnis nicht > verwenden? Hab ich ja, Ergebnis ist ein reiner I-Regler. Nur ich kann ja das net in der DA so schreiben. Irgendwie muss da etwas Vorbetrachtung rein. Ich kann ja nicht schreiben PID Regelalgorithmus genommen und so lange rumgespielt bis es passte. mfg
Angehängte Dateien:
-

formel.PNG
2 KB

Ich verwende angehangene Formel. Wobei die Terme D=P=0 sind. Der Multiplikationsterm vor dem I-Teil is 0.004. Das ist was ich als funktioniernde Funktion habe. Aber ersten will ich es besser verstehen und zweitens sollte ich in der DA etwas zur Theorie sagen können. Daher mein Aufriss mit den Formeln. mfg
Kris Dis schrieb: >> Auf der anderen Seite haben wir ja einen Arbeitspunkt, nämlich y = 6V >> soll konstant sein. Zielführend wäre es also bei allen Messungen, die >> unbeteiligte Größe so einzustellen, dass der Ausgang auf 6V liegen kann. >> Wobei mir da für die Messung an u kein einleuchtender Wert für d >> einfällt. >> > ??Nicht verstanden. Wenn da Nichtlinearitäten drin sind, z.B. könnte ich mir vorstellen, das die stationäre Verstärkung der Form u*d ist, dann kann man keine rationale Übertragungsfunktion ermitteln. Die Übertragungsfunktion entsteht aus Laplace-Transformation der Differentialgleichung zwischen betrachtetem Eingang und Ausgang. Sie beschreiben ausschließlich LZI-Systeme: Lineare Zeitinvariante Systeme nichtlineare Systeme sind nicht linear :D Will man ein Solches in ein lineares System umrechnen, braucht man einen Arbeitspunkt, in dem das System betrieben werden soll. Das ist insofern auch sinnvoll, da die Abweichung e(t) am Ende ja möglichst gering sein soll und der Regler das ganze Ding in einem stabilen Zustand halten soll! Man kann sich das wie bei der Taylorreihenentwicklung vorstellen: Ich suche mir einen Punkt, der mich interessiert, und nähere das Ganze in diesem Punkt durch einfachere (hier lineare) Gleichungen an. Ich hab so etwas aber bisher immer nur mit Gleichungen und noch nicht grafisch gemacht. Der Arbeitspunkt wäre auf jeden Fall durch y = 6V vorgegeben. Nur welche u(t) = const und welche d(t) = const sinnvoll wären, um die Reaktion auf die jeweils andere Größe zu messen, ist mir nicht ganz klar. Aber grundsätzlich ist es ja schonmal ein Riesenvorteil, dass die Störgröße im Experiment eingestellt werden kann. Ein simples I-Glied ist übrigens laut Theorie kein schlechter Ansatz, da ja kaum Dynamik gefordert ist und ein I-Glied stationäre Genauigkeit (y bleibt sicher auf 6V, wenn w auf 6V bleibt) sicherstellt. Kris Dis schrieb: > Wird nur gutes Störverhalten verlangt muss ich doch die Störfunktion > betrachten? Mit G_R(s)=G_Z(s)^-1-G_S(s)^-1 und bekomme dann: Diese Formel ist mir nicht geläufig, was aber nichts heißt. Wie kannst du überhaupt etwas ausrechnen? Ich dachte, wir hätten erst die Störübertragungsfunktion der Strecke ermittelt? Bahnhof. Grundsätzlich kann man von G(s) auf die Störübertragungsfunktion des geregelten Systems umrechnen, wenn man weiß WO die Störung eingreift. In den meisten akademischen Fällen wird die Störung auf den Ausgang draufsummiert. Das ist aber hier nicht der Fall. Wir haben ja eine Störübertragungsfunktion des ungeregelten Systems ermittelt. Da steht also auch eine fiese DGL dahinter, bevor die Störung aufsummiert wird. Das Umrechnen ist vermutlich schon möglich, aber dafür ist es jetzt noch zu früh, so lange G(s) unbekannt ist. Das ist dann am Ende für die Auslegung des Reglers hilfreich
Armin schrieb: > Kris Dis schrieb: >>> Auf der anderen Seite haben wir ja einen Arbeitspunkt, nämlich y = 6V >>> soll konstant sein. Zielführend wäre es also bei allen Messungen, die >>> unbeteiligte Größe so einzustellen, dass der Ausgang auf 6V liegen kann. >>> Wobei mir da für die Messung an u kein einleuchtender Wert für d >>> einfällt. >>> >> ??Nicht verstanden. > > Wenn da Nichtlinearitäten drin sind, z.B. könnte ich mir vorstellen, das > die stationäre Verstärkung der Form u*d ist, dann kann man keine > rationale Übertragungsfunktion ermitteln. Die Übertragungsfunktion > entsteht aus Laplace-Transformation der Differentialgleichung zwischen > betrachtetem Eingang und Ausgang. Sie beschreiben ausschließlich > LZI-Systeme: > Lineare Zeitinvariante Systeme > nichtlineare Systeme sind nicht linear :D Ok. > Will man ein Solches in ein lineares System umrechnen, braucht man einen > Arbeitspunkt, in dem das System betrieben werden soll. Das ist insofern > auch sinnvoll, da die Abweichung e(t) am Ende ja möglichst gering sein > soll und der Regler das ganze Ding in einem stabilen Zustand halten > soll! > Man kann sich das wie bei der Taylorreihenentwicklung vorstellen: Ich > suche mir einen Punkt, der mich interessiert, und nähere das Ganze in > diesem Punkt durch einfachere (hier lineare) Gleichungen an. > > Ich hab so etwas aber bisher immer nur mit Gleichungen und noch nicht > grafisch gemacht. Der Arbeitspunkt wäre auf jeden Fall durch y = 6V > vorgegeben. Nur welche u(t) = const und welche d(t) = const sinnvoll > wären, um die Reaktion auf die jeweils andere Größe zu messen, ist mir > nicht ganz klar. > Aber grundsätzlich ist es ja schonmal ein Riesenvorteil, dass die > Störgröße im Experiment eingestellt werden kann. > > > > Ein simples I-Glied ist übrigens laut Theorie kein schlechter Ansatz, da > ja kaum Dynamik gefordert ist und ein I-Glied stationäre Genauigkeit (y > bleibt sicher auf 6V, wenn w auf 6V bleibt) sicherstellt. > > Kris Dis schrieb: >> Wird nur gutes Störverhalten verlangt muss ich doch die Störfunktion >> betrachten? Mit G_R(s)=G_Z(s)^-1-G_S(s)^-1 und bekomme dann: Seite 267 http://books.google.de/books?id=YcPK5r1Csj4C&printsec=frontcover&dq=Steuerungs-+und+Regelungstechnik+f%C3%BCr+Ingenieure&cd=1#v=onepage&q&f=false > Diese Formel ist mir nicht geläufig, was aber nichts heißt. > Wie kannst du überhaupt etwas ausrechnen? Ich dachte, wir hätten erst > die Störübertragungsfunktion der Strecke ermittelt? Bahnhof. Nein, wir haben die Störübertragungsfkt G_Z(s)bestimmt und ich habe bereits die StreckenübertragungsfktG_S(s) bestimmt. -> von hier http://www.mikrocontroller.net/attachment/78868/sprungantwort_auf_y.png > Grundsätzlich kann man von G(s) auf die Störübertragungsfunktion des > geregelten Systems umrechnen, wenn man weiß WO die Störung eingreift. In > den meisten akademischen Fällen wird die Störung auf den Ausgang > draufsummiert. Das ist aber hier nicht der Fall. Wir haben ja eine > Störübertragungsfunktion des ungeregelten Systems ermittelt. Da steht > also auch eine fiese DGL dahinter, bevor die Störung aufsummiert wird. > Das Umrechnen ist vermutlich schon möglich, aber dafür ist es jetzt noch > zu früh, so lange G(s) unbekannt ist. > Das ist dann am Ende für die Auslegung des Reglers hilfreich Aso, ich habe ebenfalls am Ausgang die Störung angenommen. Daher ist die genannte G_R(s) obsolet. Hmpf, ist denn das so kompliziert? mfg
Angehängte Dateien:
-

reglkreis.PNG
2,3 KB
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
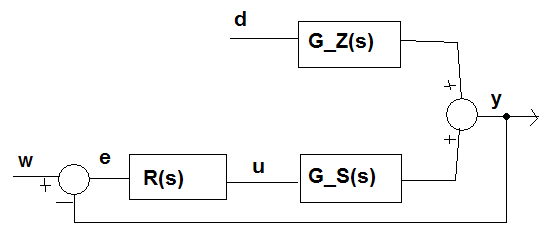
achso ich hab da wohl einiges verpasst. Gut, dann sind wir tatsächlich weiter. Ich habe mal den geschlossenen Regelkreis aufgezeichnet mit auszulegendem Regler R(s) jetzt kann man ganz einfach einsetzen: Y(s) = G_Z * D(s) + R*G_S * E(s) E(s) = W(s) - Y(s) Für die reine Störübertragungsfunktion des geschlossenen Regelkreises nimmt man W(s) zu null an und kann einsetzen: Y(s) = G_Z * D(s) - R*G_S * Y(s) Y(s) * (1 + R*G_S) = G_Z * D(s) Y(s) / D(s) = G_Z / (1 + R*G_S) Wobei das G_Z hier das Störverhalten der STRECKE alleine beschreibt. Wenn du ein geregeltes Störverhalten vorgeben möchtest, wie im Buch beschrieben, setzt du diesen Term gleich deiner Gewünschten Funktion und löst nach R auf.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.