Hallo, bei Polo ist ein Schräglagensensor für Motorräder angekündigt: https://www.polo-motorrad.de/cms/index.php?id=284 Ich denke, ein Kreiselsystem wird zu teuer sein. Wie könnte so etwas funktionieren. Rein aus Interesse. Der Hinweis "Funktioniert ... auf allen Fahrbahnbelägen " lässt vielleicht auf ein optisches System schließen?! Was sagt ihr? Gruß Michi
entweder gyro oder optisch geht beides, wobei nen gyro einfacher und günstiger ist
Nur Gyro führt zu Integrationsfehlern. Wird also eine ganze Inertial Measurement Unit drin sein. Sprich: Gyroskop + Beschleunigungssensor + Sensordatenfusion.
ist das nicht ziemlicher bullshit? zu einer kurve und einer geschwindigkeit gibt es doch nur eine "schräglage".
Sicher nur ein kleiner Gyro-Sensor, solche wie auch in dem Wii-Mote-Expansionsdingens stecken. Die sind klein und billig. Ich frag mich aber was das bringt, soll der Fahrer dann vor der Kurve schnell eine Schiebetabelle rauskramen und den optimalen Winkel daran ablesen?
@ drone Ich denke die Schräglage hängt auch von der Reifenbreite und Schwerpunktslage ab. Ein tiefer Chopper mit breiten Reifen brauch bei gleicher Geschw. und Kurvenradius eine größere Schräglage als z.B. einen Enduro.
Mich würde so ein Sensor schon interessieren. Damit ich mal weiß wieviel Schräglage ich fahre. Dann wüßte ich wieviel Reserve und damit Sicherheit ich noch habe. Laut Prof. Dr. Bernd Spiegel (Autor: Die obere hälfte des Motorrads; Verhaltensforscher) ist der Mensch nicht in der Lage Schräglagen größer 20° einzuschätzen. Mir fällt es schwer meinen Schräglage einzuschätzen ... Eine nette Spielerei ist es auch ;-)
Gyro + Beschleunigungssenor + Kalmanfilter Ist keine leichte Aufgabe - gerade die Kalmanfilter und generell das DSP. Ausserdem ist es recht wichtig den Sensor so nah wie Möglich an der "Kipp-Achse" also der Straße zu plazieren. Ansonsten muss man das physikalisch ummodeln und auf einen höheren "Messpunkt" umlegen. Die tiefste Messmöglichkeit dürfte warscheinlich die Vorderradachse (soweits die gibt) sein. Man könnte hier in einem kleinen wasserdichten Kästchen Gyro + Accelerometer befestigen. Mit einer geschirmten Leitung könnte man dann an der Federgabel entlang hochfahren bis zum Lenker. Eine dreistellige Sieben-Segment-Anzeige bzw. ein anderes gut lesbares Display und ein Microcontroller wären sicher nicht schlecht.
Ich tippe mal auf eine viel banalere Lösung: Ein Beschleunigungssensor. Bei Stillstand oder gerader Fahrt misst der nur die Erdbeschleunigung. In der Kurve misst er die vektorielle Summe aus Erd- und Zentrifugalbeschleunigung. Unter der Annahme dass das Motorrad "in Balance" ist, lässt sich daraus ganz einfach die Schräglage errechnen. Wenn das Motorad gerade umfällt oder von einer externen Kraft in Schräglage gehalten wird funktioniert das aber nicht mehr. Eine Lösung mit einer richtigen IMU oder angewinkelten Lasersensoren die, unter Berücksichtigung des Federweges, den Abstand zur Straße messen wäre natürlich genauer. Ich glaube aber nicht dass man hier einen derartigen Aufwand treibt. Gruß Reinhard
Reinhard R. schrieb: > Ich tippe mal auf eine viel banalere Lösung: Ein Beschleunigungssensor. > Bei Stillstand oder gerader Fahrt misst der nur die Erdbeschleunigung. > In der Kurve misst er die vektorielle Summe aus Erd- und > Zentrifugalbeschleunigung. Unter der Annahme dass das Motorrad "in > Balance" ist, lässt sich daraus ganz einfach die Schräglage errechnen. Das heißt aber auch, dass das Ding in jeder Kompression eine Schräglage anzeigt. Die Bremse antippen und das Ding zeigt eine Schräglage an. Das dürfte wohl nicht besonders praxistauglich sein.
Der Winkel bei der eine Balance zwischen Zentripedal- und Erdbeschleunigung herrscht, wird von der Geometrie des Motorrads, vom Fahrer & Beladung & Tankinhalt (Änderung der Schwerpunktslage) und Reifendurchmesser abhängen. Mann müßte also kalibrieren, aber wie soll das laufen? Ich denke nicht, dass der Sensor von Polo so funktioniert.
Reifeinbreite natürlich, nicht Durchmesser.
Das Problem mit dem Beschleunigungssensor alleine ist ok wenn das Motorrad nicht fährt. Bei Elektor gab's vor ein paar Monaten mal ne Alarmanlage mit nur nem Beschleunigungssensor die auf Kippen reagierte. Wenn sich das Ding bewegt gibt's allerdings verdammt viele andere Kräfte. Die kommen von Straßenunruhen, Schlaglöchern und der Kurvenfahrt. Nachdem beim Motorrad die Schräglage nur in den Kurven interessant ist (oder?) und man nicht stehen bleiben kann ist ein Beschleunigungssensor alleine absolut inakzeptabel. Bei jedem Quadrocopter und Segway wird eine Kombination aus Gyrp + Beschleunigungssensor (=Accelero(meter)) verwendet. Nochmal: Der Beschleunignugssensor alleine misst zu viel und wird von der Zentrifugalkraft viel zu stark beeinflusst. Wenn ich mit dem Auto fahre und meinen Beschleunigungssensor an Bord habe dann habe ich mit meinem alten Passat mit 90 PS durchaus 0.8g da stehen. (Normalfahrt / normales Bremsen vor Ampeln und so). Was dann bei einem Motorrad dasteht möcht ich garnicht wissen. 0.8g alleine Messungenauigkeiten sind bei zu messenden 1g verdammt viel. Integriert man das ganze für den Winkel so fährt der Fahrer warscheinlich auf dem Kopf ...
Achja so Schlaglöcher und so die geben in Z-Richtung durchaus beim Auto mit 30km/h mal höhere zweistellige g-Werte her...
Grundsätzlich wird so ein Teil benutzt um den Blinker automatisch wieder abzuschalten, nachdem man die Kruve gefahren ist. Bei Autos ist das Standart, wird jedoch mechanisch durch den Einschlag des Lenkers gemacht. Beim Motorrad ist es üblich, dies über die Schräglage zu machen. Wie genau die jedoch ist weiss ich nicht, da man eigentlich nur einen bestimmten punkt überschreiten muss um den Blinker auszuschalten, und nicht etwa bei 60.35° Aber wenn du dich für die absolute Neigung interessierst, fällt mir spontan die "Wasserwaage" beim Iphone ein. Die scheint ziemlich genau zu sein, musst nurnoch den Chip ausfindig machen
@asdf Über einen Beschleunigungssensor zu messen, ob Schräglage herrscht oder nicht (um den Blinker auszuschalten) sollte kein Problem sein. Wieviel Schräglage spielt hier ja keine Rolle. Das iPhone wird auch nur in Ruhelage einen korrekten Winkel anzeigen können.
Michi schrieb: > @asdf > > Über einen Beschleunigungssensor zu messen, ob Schräglage herrscht oder > nicht (um den Blinker auszuschalten) sollte kein Problem sein. Wieviel > Schräglage spielt hier ja keine Rolle. > > Das iPhone wird auch nur in Ruhelage einen korrekten Winkel anzeigen > können. Ein Beschleunigungsmesser ist zum Feststellen der Lage im Raum (und sei es nur eine Schräglage) völlig untauglich. Noch schlimmer als die Schräglage von Motorradfahrern sind wohl Kunstflugpiloten. Könner schaffen es, Loopings zu fliegen, ohne das aus einem im Cockpit aufgestelltem Wasserglas auch nur 1 Tropfen verschüttet wird. Linienpiloten fliegen regelmässig derartig genaue Kurven mit dazugehöriger Schräglage, dass sich am Glas Orangensaft noch nicht einmal die Oberfläche kreuselt.
also der beschleunigungs messer sollte doch möglich sein?? wir haben doch einfach a) nach vorne bzw hinten die beschleunigung durchs gas geben vom fahrzeug b) nach unten die erdbeschleunigung c) nach links/rechts haben wir nur eine beschleunigung wenn die maschine geneigt ist
g ist die Erdbeschleunigung und kann dann durch b und c ausgedrückt werden, kleine(??) ungenauigkeiten gibt es vll nur durch das rein legen in die schräglage, wenn man sie aber konstant hällt, dann sollte man doch mit einem einfachen Beschleunigungsmesser die aufgabe schaffen?? mfg
Angehängte Dateien:
-

Schr_glage.png
330 KB
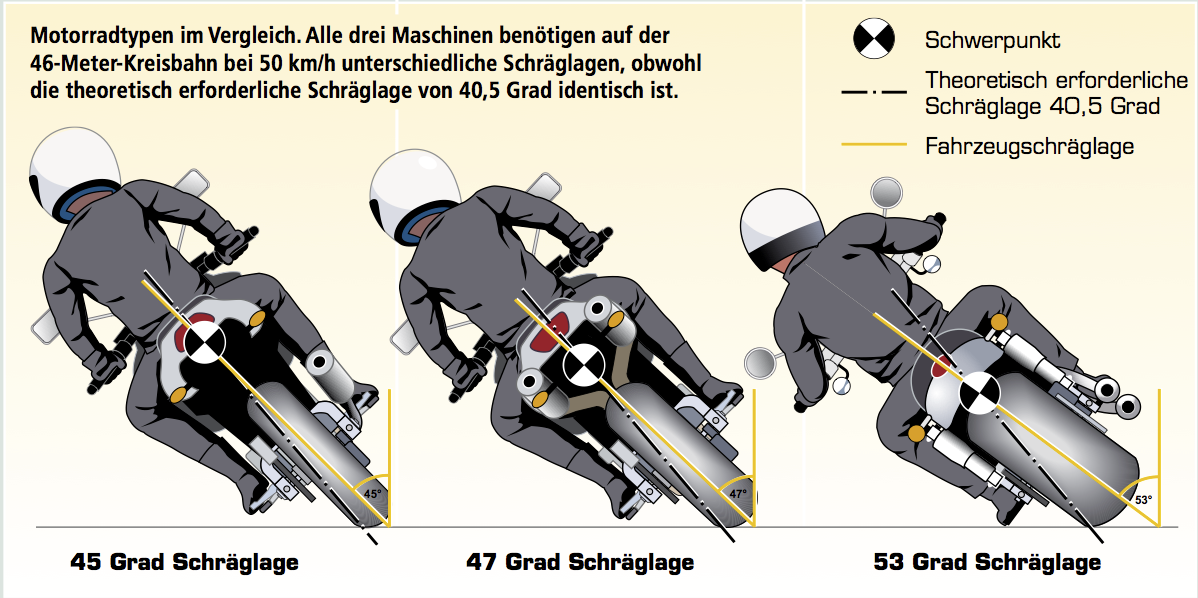
Das Problem ist im angehängten Bild gut erklärt. Gleich Geschw. und gleicher Kurvenradius bedeuten gleich Zentripedalbeschleunigung. ABER je nach Motorrad unterschiedliche Schräglage! Also kann man alleine durch die Messung der Querbeschleunigung keine genaue Aussage über die Schräglage machen.
Das Bild stammt übrigens aus dieser Broschüre des Institut für Zweiradsicherheit e.V.: http://www.ifz.de/download/Broschueren/Motorrad_fahren_gut_und_sicher_www.pdf Sehr empfehlenswert!
Michi schrieb: > ABER je nach Motorrad unterschiedliche Schräglage! Also kann man alleine > durch die Messung der Querbeschleunigung keine genaue Aussage über die > Schräglage machen. Wenn du dich das noch immer frägst, dann schau dir mal dieses Video an http://www.youtube.com/watch?v=9ZBcapxGHjE&feature=fvsr ab 2:14
Hallo, könnten nicht zwei Sensoren den Abstand zum Boden messen? Z.B.: Lasertriangulation: http://de.wikipedia.org/wiki/Lasertriangulation#Lasertriangulation Je einen Sensor unter dem Getriebe links und rechts. Aus dem Abstand der Sensoren und der Differenz des Abstandes zum Boden ergibt sich die Schräglage. Würde auch die Aussage "Funktioniert ... auf allen Fahrbahnbelägen" erklären Jürgen
> Wenn du dich das noch immer frägst, dann schau dir mal dieses Video an > http://www.youtube.com/watch?v=9ZBcapxGHjE&feature=fvsr > ab 2:14 Hab doch eben nichts gefragt. Aber den Zusammenhang mit dem Video verstehen ich nicht!.
Michi schrieb: >> Wenn du dich das noch immer frägst, dann schau dir mal dieses Video an >> http://www.youtube.com/watch?v=9ZBcapxGHjE&feature=fvsr >> ab 2:14 > > Hab doch eben nichts gefragt. Aber den Zusammenhang mit dem Video > verstehen ich nicht!. Der Ice-Tee zeigt ganz deutlich: Ein Beschleuigungsmesser würde keinerlei Querbeschleunigung messen. Und jetzt achte mal auf die Landschaft ausserhalb des Fensters, was die so alles macht: der kurvt rum, dass es nur so eine Pracht ist. Nur: Dein Beschleunigungsmesser würde überhaupt nichts registrieren.
Querbeschleunigung beim Motorrad ist ja die zentripedal Beschleunigung. Diese wirkt ja immer zum Mittelpunkt der Drehbewegung. Also würde die "Querbeschleunigung" senkrecht zur Oberfläche wirken und messbar sein. Sie hält ja auch die Flüssigkeit im Glas. Wie wenn man einen Eimer mit Wasser herumwirbelt. Oder nicht?
Beim Motorrad müsste ich also in Kurvenfahrt das Glas mit dem Boden senkrecht zur Fahrbahn halten, um einen vergleichbare Situation wie im Flugzeug zu haben. Die "Querbeschleunigung" wäre dann messbar. Nur würde sie wie im obigen Bild beschrieben, nichts genaues über die Schräglage aussagen.
Michi schrieb: > Querbeschleunigung beim Motorrad ist ja die zentripedal Beschleunigung. > Diese wirkt ja immer zum Mittelpunkt der Drehbewegung. Also würde die > "Querbeschleunigung" senkrecht zur Oberfläche wirken und messbar sein. > Sie hält ja auch die Flüssigkeit im Glas. Wie wenn man einen Eimer mit > Wasser herumwirbelt. Oder nicht? Eimer Wasser: der ist gut Wenn du den Eimer um dich wirbelst wie ein Riesenrad, dann zeigt dir der Beschleunigungsmesser im untersten Punkt eine erhöhte Kraft in Richtung Eimerboden an, am obersten Punkt eine etwas geringere Kraft in Richtung Eimerboden. Kippst du die Drehachse ein wenig, dann zeigt dir dein Beschleunigungsmesser im untersten Punkt eine erhöhte Kraft in Richtung Eimerboden, am obersten Punkt eine etwas geringere Kraft in Richtung Eimerboden. Gehst du in den Extremfall, so dass du den Eimer um deine Hüften kreisen lässt, dann zeigt dir dein Beschleunigungsmesser eine gleichbleibende Kraft in Richtung Eimerboden. Was sagt dir das jetzt über die Ausrichtung der Kreisbahn. Genau. Gar nichts. (Alle halbe Jahr wieder dieselbe Diskussion. Mit einem Beschluenigungssensor alleine kann man in einem sich bewegenden System nicht viel anfangen)
Versteh ich nicht - wieso dreht sich die Landschaft und nicht das Flugzeug ??? :-D sorry man. xD Back to Topic: Ein Gyro + Acclerometer + Kalman = Winkelmessung => Schräglageanzeige. Um das ganze zu Entwickeln würde ich zuerst mal alle Spannungen von Gyro und Beschleunigungssensor und die gefahrene Wegstrecke mitloggen. Ich würde langsam entlang einer Linie fahren. Auf Teer erstmal. Dann das alles in einen Zusammenhang bringen (graphisch). Dann sieht man z.B. hohe Beschleunigungen bei Schlaglöchern oder dergleichen. Wichtig ist sicherlich ein Kalmanfilter / div. Hochpass + Tiefpass-filterstufen. Alternativ lautet das Zauberwort DSP.
Karl heinz Buchegger schrieb: > Gehst du in den Extremfall, so dass du den Eimer um deine Hüften kreisen > lässt, dann zeigt dir dein Beschleunigungsmesser eine gleichbleibende > Kraft in Richtung Eimerboden. > > Was sagt dir das jetzt über die Ausrichtung der Kreisbahn. > Genau. Gar nichts. Doch, schon. Die gemessene Beschleunigung wird größer, wenn man durch die Kurve fährt. Querbeschleunigungen können eh nicht gemessen werden (bzw. wenn men messbare Querbeschleunigungen hat liegt man sowieso auf der Schnauze). Das Messprinzip wäre also so wie bei einer Zentrifuge und wie oben schon erwähnt: Je schneller du den Eimer kreist, desto größer ist die Kraft in Richtung Eimerboden. Die Schräglage ist also sin(a) = g/F wenn F der Betrag der gemessenen Kraft ist. Der Sensor misst dabei nur nach unten (das "Unten" vom Mopped), wodurch auch Beschleunigungen beim Spart/Bremsen größtenteils wegfallen, weil sie senkrecht dazu sind. Hubbel sind dann eine Sache für'n Tiefpass.
Michi schrieb: > Der Hinweis "Funktioniert ... auf allen Fahrbahnbelägen " lässt > vielleicht auf ein optisches System schließen?! Nein glaub ich nicht - da steht nur was von einfacher Montage und optische Sensoren sind nicht einfach zu montieren bzw. bei schlechtem Wetter nicht mehr nutzbar. Dreck, etc noch nicht einberechnet. "Funktioniert ... auf allen Fahrbahnbelägen " ist recht weit gefasst. Was die als Fahrbahnbelag zählen ist fraglich. Schotterstraßen z.B. würde ich nicht als Fahrbahnbelag rechnen...
> Gehst du in den Extremfall, so dass du den Eimer um deine Hüften kreisen > lässt, dann zeigt dir dein Beschleunigungsmesser eine gleichbleibende > Kraft in Richtung Eimerboden. Richtig! Die Kraft in Richtung Eimerboden ist abhängig von Kreisradius (z.B. Armlänge) und der Geschwindigkeit auf der Kreisbahn( bei gleichem Radius als von der Drehzahl/Winkelgeschwindigkeit) und der Masse. Aber jetzt kommt doch der entscheidene Punkt. Zu einer bestimmten Querkraft gehört eine bestimmte Schräglage ( ohne diese Gleichgewicht würde man umfallen). Wenn ich diese Verhältnisse nun kennen würde, könnte ich daraus die Schräglage bestimmen. Problem: Je nach Motorrad, Reifen, Fahrerproportionen ist diese Verhältnis anders und müsste parametrisiert werden. Wobei sich das bei Änderung der Sitzposition, leerer werdenden Tank, ... wieder änder würde. DAS ist doch das Problem an der Sache oder sehe ich das falsch?
Lehrmann Michael schrieb: > Michi schrieb: >> Der Hinweis "Funktioniert ... auf allen Fahrbahnbelägen " lässt >> vielleicht auf ein optisches System schließen?! > > Nein glaub ich nicht - da steht nur was von einfacher Montage und > optische Sensoren sind nicht einfach zu montieren bzw. bei schlechtem > Wetter nicht mehr nutzbar. Hmm. Ultraschall? So wie die Abstandswarner beim Auto.
Michi schrieb: > Wenn ich diese Verhältnisse nun kennen würde, könnte ich daraus die > Schräglage bestimmen. Du machst schon wieder den Fehler, der auch weiter oben schon gemacht wurde. Du gehst con Laborbedingungen aus, die du in der Praxis nicht hast. Dein Beschleunigungssensor wird dir bei einer Fahrt alles mögliche anzeigen.
@Micha: Du gehst von einer statischen Situation aus. Fahren ist eine eher dynamischen Situation.
>> Dein Beschleunigungssensor wird dir bei einer Fahrt alles mögliche >> anzeigen. Was? Längsbeschleunigungen schon mal nicht, liegen ja nicht in der Sensorachse.
Michi schrieb: >>> Dein Beschleunigungssensor wird dir bei einer Fahrt alles mögliche >>> anzeigen. > > Was? > > Längsbeschleunigungen schon mal nicht So einfach ist das nicht. Beim Abbremsen geht die Gabel in den Dämpfer: Ein Teil der Brembsbeschleunigung taucht damit auch im 'Neigungssensor' auf. Gas geben dasselbe: Die Gabel kommt aus dem Dämpfer heraus und damit hast du wieder eine Anteil am Sensor Schlaglöcher, überfahrene Steine, Kuppen, Kompressionen. All das misst du mit > liegen ja nicht in der Sensorachse. Mit einer 'Achse' kommst du sowieso nicht weiter. Wenn überhaupt dann brauchst du eine Messeben.
Darüber das es mit einem Beschleunigungssensor nicht geht, sind wir uns ja einig. Nur was ist die Ursache!
Karl heinz Buchegger schrieb: > Das heißt aber auch, dass das Ding in jeder Kompression eine Schräglage > anzeigt. Die Bremse antippen und das Ding zeigt eine Schräglage an. Das > dürfte wohl nicht besonders praxistauglich sein. Infolge von Längsbeschleunigungen neigt sich das Motorrad. Das stimmt. Aber aus Sicht des Sensors wird die Beschleunigung kleiner 1g. Das mag auf den ersten Blick nicht sehr intuitiv sein, bei näherer Betrachtung wird es aber klar. Da die Software in Kurven aber mehr als 1g erwartet, braucht sie hier nur eine kleine Plausibilitätsprüfung vorsehen, und sie erkennt dass es sich hierbei um keine Schräglage während der Fahrt handeln kann. Das bedeutet dann aber auch dass bei Brems- und Beschleunigungsvorgängen eine schon vorhandene Schräglage niedriger gemessen wird. IMHO fällt aber die größte Schräglage in einer Kurve bei einem "schönen" Fahrstil nicht mit Phasen großer Längsbeschleunigung zusammen (http://de.wikipedia.org/wiki/Kammscher_Kreis). Schlaglöcher etc. sind ein anderes Thema, die sollten sich aber auch mit einem Filter einigermaßen in den Griff bekommen lassen. Lehrmann Michael schrieb: > Nachdem beim Motorrad die Schräglage nur in den Kurven > interessant ist (oder?) und man nicht stehen bleiben kann ist ein > Beschleunigungssensor alleine absolut inakzeptabel. Auf diese Art darf man das nicht angehen. Es ist genau umgekehrt. Angenommen das Motorrad befindet sich in 45° Schräglage. Steht das Motorrad still, wird der Sensor 1/Wurzel(2) g anzeigen. Fährt das Motorrad aber, zeigt der Sensor 1*Wurzel(2) g an. Angenommen wird hierbei dass sich das Motorrad im Gleichgewicht befindet. Die Berechnung die man mit den Sensordaten anstellen muss ist ganz simpel. Zuerst bestimmt man die Querbeschleunigung (Phytagoras, im Falle von 45° 1g), und danach nimmt man noch den Arcustangens aus dem Verhältnis von Quer-/Vertikalbeschleunigung um auf den Winkel zu kommen. Michi schrieb: > Wenn ich diese Verhältnisse nun kennen würde, könnte ich daraus die > Schräglage bestimmen. > > Problem: Je nach Motorrad, Reifen, Fahrerproportionen ist diese > Verhältnis anders und müsste parametrisiert werden. Wobei sich das bei > Änderung der Sitzposition, leerer werdenden Tank, ... wieder änder > würde. > > DAS ist doch das Problem an der Sache oder sehe ich das falsch? Da stellt sich jetzt die Frage wie man die Schräglage genau definiert. Eine Messung auf Basis eines Beschleunigungssensors würde den Winkel der gedachten Verbindungslinie von Schwerpunkt zu Auflagepunkt messen. Je nachdem wie dick der Reifen ist, muss sich der Fahrer entsprechend weit reinhängen damit dies ident zur Fahrzeugschräglage wird. Gruß Reinhard
macht die Sache doch nicht so kompliziert! Es geht ganz einfach: Es gibt 3-Achsenwinkelsensoren, sind sogar in irgendwelchen Handys verbaut. Aus diesen Dingern kommt Gleichspannung raus, Dämpfung rein und bischen Krempel drumherum für Siebensegment-Anzeige ...... fertig. Irgendwo in Elektor wurde der Sensor mal vorgestellt. Im Modellbau wird der schon ewig benutzt um z.B. U-Boote waagerecht zu halten.
Nachtrag: Die Messung hat immer dann wenn die Fahrzeugschräglage nicht der "Schwerpunkts-Auflagepunktsschräglage" entspricht, einen prinzipbedingten Messfehler bei der Verwendung eines einachsigen Beschleunigungssensors. Mit einem zweiachsigem Sensor und einer Betragsbildung lässt das beheben. Die Lösung ist wie gesagt nicht besonders elegant oder genau. Ich zweifle halt nur ein wenig daran dass man bei Polo eine vollwertige IMU kaufen kann. ;-) Vermutlich gibt es noch eine Reihe anderer primitiver Messverfahren mit denen man die Schräglage "genau genug" bestimmen kann. Gruß Reinhard
Gerd Vg schrieb: > macht die Sache doch nicht so kompliziert! > Es geht ganz einfach: > Es gibt 3-Achsenwinkelsensoren, sind sogar in irgendwelchen Handys > verbaut. > Aus diesen Dingern kommt Gleichspannung raus, Dämpfung rein und bischen > Krempel drumherum für Siebensegment-Anzeige ...... fertig. > Irgendwo in Elektor wurde der Sensor mal vorgestellt. > Im Modellbau wird der schon ewig benutzt um z.B. U-Boote waagerecht zu > halten. Das funktioniert leider nur in statischen Systemen. In eine dynamischem, wie einem Motorad oder noch extremer der Luft- und Raumfahrt. Geht das nicht mehr. Die Lösung dafür heißt IMU, die ist aber bedeutend aufwendiger.
Was mich interessieren würde. Was ist eigentlich das Bezugsniveau für die Schräglage. Sagt jetzt nicht voreilig: die Strasse. Gerade dort, wo Motorradfahren schön ist, in den Bergen, hängen die Kurven nach innen. Wogegen wird gemessen: Gegen den Strassenbelag oder gegen den mathematischen Horizont? Was wäre sinnvoller?
Ich würde sagen gegen die Straße. Bei einer überhöhten Kurve brauche ich weniger Schräglage. Die zusätzliche Kraftkomponente in Motorrad-Vertikal-Achse ermöglicht höher Reifenkräft und das interressiert mich ja!?
@ Reinhard R. >Zuerst bestimmt man die Querbeschleunigung (Phytagoras, im Falle >von 45° 1g Diese Annahme ist doch falsch? 45° Schräglage bedeuten nicht in jedem Fall 1g! => http://www.mikrocontroller.net/attachment/79342/Schr_glage.png
{kind=link}
... und das ist doch das Problem an der Sache.
Mal eine Frage zu Gyros: Wie schnell driften die denn? Man fährt ja nicht minutenlang in Schräglage. Imho müßte es doch reichen wenn man es schafft (notfalls manuell) den Sensor bzw. die SW bei aufrechter Fahrt auf 0 zu setzen.
Michi schrieb: > Querbeschleunigung beim Motorrad ist ja die zentripedal Beschleunigung. > Diese wirkt ja immer zum Mittelpunkt der Drehbewegung. Richtig. Du hast aber noch die Gewichtskraft, die sich damit überlagert. Die resultierende Kraft muß zwingend entlang der Hochachse des Motorrads gehen, bzw. entlang der Achse zwischen Schwerpunkt und dem Punkt, wo es die Straße berührt. Tut sie das nicht, kippt das Motorrad um. Deshalb hat es ja die Schräglage. Das bedeutet aber, daß diese resultierende Kraft, die du mißt, zwar in der Kurve größer ist als bei Geradeausfahrt, weil sich zur Gewichtskraft die Zentripetalkraft addiert, aber vom Sensor aus gesehen immer in dieselbe Richtung zeigt. > Also würde die > "Querbeschleunigung" senkrecht zur Oberfläche wirken und messbar sein. > Sie hält ja auch die Flüssigkeit im Glas. Sieh es so: Die Flüssigkeit erkennt keine Querkraft und bleibt deshalb im Glas. Warum sollte es dem Sensor anders gehen? > Beim Motorrad müsste ich also in Kurvenfahrt das Glas mit dem > Boden senkrecht zur Fahrbahn halten, um einen vergleichbare Situation > wie im Flugzeug zu haben. Die "Querbeschleunigung" wäre dann messbar. Richtig. Wenn ich den Sensor immer horizontal halten würde, könnte ich damit auch die Querbeschleunigung messen, weil sie dann in einem Winkel von 90° zur Erdbeschleunigung wäre. > Nur würde sie wie im obigen Bild beschrieben, nichts genaues über die > Schräglage aussagen. Naja, um das Glas geradehalten zu können, müßte ich ja wissen, in welchem Winkel ich es zum Motorrad halten muß, und damit hätte ich dann auch die Schräglage des Motorrades. Michi schrieb: > Aber jetzt kommt doch der entscheidene Punkt. Zu einer bestimmten > Querkraft gehört eine bestimmte Schräglage ( ohne diese Gleichgewicht > würde man umfallen). Ja, wobei du dazu das Motorrad von außen betrachten mußt. Aus Sicht des Motorradfahrers gibt es keine Querkraft. > Problem: Je nach Motorrad, Reifen, Fahrerproportionen ist diese > Verhältnis anders und müsste parametrisiert werden. Wobei sich das bei > Änderung der Sitzposition, leerer werdenden Tank, ... wieder änder > würde. Da ändert sich nichts, außer wenn der Fahrer sich zur Seite lehnt.
Michael G. schrieb: > Mal eine Frage zu Gyros: > > Wie schnell driften die denn? Man fährt ja nicht minutenlang > in Schräglage. Imho müßte es doch reichen wenn man es schafft > (notfalls manuell) den Sensor bzw. die SW bei aufrechter Fahrt > auf 0 zu setzen. Und woran erkennst du, wann genau das Motorrad gerade ist? Man könnte höchstens einen Mittelwert bilden, unter der Annahme, daß man in einem für die Driftkorrektur ausreichend kurzen Zeitraum ungefähr genausoviele Linkskurven wie Rechtskurven fährt, was aber nicht unbedingt zutreffen muß.
Michi schrieb: > @ Reinhard R. >>Zuerst bestimmt man die Querbeschleunigung (Phytagoras, im Falle >>von 45° 1g > > Diese Annahme ist doch falsch? 45° Schräglage bedeuten nicht in jedem > Fall 1g! => > http://www.mikrocontroller.net/attachment/79342/Schr_glage.png Deswegen habe ich auch bewusst "Schwerpunkts-Auflagepunktsschräglage" (sorry, mir fällt kein besseres Wort dafür ein) und Fahrzeugschräglage unterschieden. Auf den Illustrationen sitzt der Fahrer nämlich auch so schön symmetrisch auf dem Motorrad. Das ist nicht in jedem Fahrstil der Fall. Welche Schräglage nimmt man dann? Und wie sieht es das bald käufliche System von Polo und nimmt man es dort auch so genau mit diesem Unterschied?
> Sieh es so: Die Flüssigkeit erkennt keine Querkraft und bleibt deshalb > im Glas. Warum sollte es dem Sensor anders gehen? Nein. Die Zentripedalkraft ist größer als die Massenkraft durch die Erdbeschleunigung. Querkräfte tretten bei konstanter Winkelgeschwindigkeit nicht auf. >> Problem: Je nach Motorrad, Reifen, Fahrerproportionen ist diese >> Verhältnis anders und müsste parametrisiert werden. Wobei sich das bei >> Änderung der Sitzposition, leerer werdenden Tank, ... wieder änder >> würde. >Da ändert sich nichts, außer wenn der Fahrer sich zur Seite lehnt. Und wie! Darum hängen sich die Rennfahrer vom Motorrad (hanging off) damit das Motorrad eine geringer Schräglage benötigt. http://de.wikipedia.org/wiki/Fahrtechnik#Sich_in_die_Kurve_legen " ...Durch diese Technik verlagert sich der gesamte Systemschwerpunkt, sodass das Motorrad selbst nicht mehr so stark in Schräglage gebracht werden muss, was wegen des stark versetzten Reifenaufstandspunktes ansonsten nötig wäre. Durch die verringerte Schräglage kann früher aus der Kurve heraus beschleunigt werden. Außerdem ist die Auflagefläche der Reifen bei geringerer Schräglage größer (was allerdings nicht für jeden Reifen gilt, Rennreifen haben eine andere Kontur), und Fußrasten oder andere Bauteile setzen nicht auf dem Boden auf." Und genaus das ist der Knackpunkt an der ganzen Geschichte. Wenn Ihr mich fragt ... ;-)
>Das ist nicht in jedem Fahrstil der >Fall. Welche Schräglage nimmt man dann? Und wie sieht es das bald >käufliche System von Polo und nimmt man es dort auch so genau mit diesem >Unterschied? Wichtig ist die Schräglage für den Reifen auf der Fahrbahn ( also die des Motorrads zur Fahrbahn).
Rolf Magnus schrieb: > Michael G. schrieb: >> Mal eine Frage zu Gyros: >> >> Wie schnell driften die denn? Man fährt ja nicht minutenlang >> in Schräglage. Imho müßte es doch reichen wenn man es schafft >> (notfalls manuell) den Sensor bzw. die SW bei aufrechter Fahrt >> auf 0 zu setzen. > > Und woran erkennst du, wann genau das Motorrad gerade ist? Man könnte > höchstens einen Mittelwert bilden, unter der Annahme, daß man in einem > für die Driftkorrektur ausreichend kurzen Zeitraum ungefähr genausoviele > Linkskurven wie Rechtskurven fährt, was aber nicht unbedingt zutreffen > muß. Den Zustand des Geradeausfahrens sollte sich bei einer entsprechenden Instrumentierung erkennen lassen. Das könnte man zur Driftkorrektur nutzen. Das setzt halt voraus dass das hin und wieder auch geschieht.
>Da ändert sich nichts, außer wenn der Fahrer sich zur Seite lehnt.
Und wenn der Tank leer wird? Wenn ich meine Koffer am Motorrad habe?
Wenn ich einen Sozius dabei habe? Jedesmal müsste doch das Messsystem
neu parametrisiert werden.
Michi schrieb: > Und wenn der Tank leer wird? Wenn ich meine Koffer am Motorrad habe? > Wenn ich einen Sozius dabei habe? Jedesmal müsste doch das Messsystem > neu parametrisiert werden. Weshalb?
Rolf Magnus schrieb: > Und woran erkennst du, wann genau das Motorrad gerade ist? Brain v1.0 + Taster ;) Zu prüfen wäre natürlich noch ob ein Gyro sich von Vibrationen und Schlägen beeindrucken läßt. Aber sofern die Messung nach einem Tastendruck für ein oder zwei Minuten einigermaßen funktioniert, würde mir das schon reichen.
drone schrieb: > zu einer kurve und einer > geschwindigkeit gibt es doch nur eine "schräglage". Und wie willst du den Kurvenradius messen?
Schwerpunkt! So haben GP Rennmotoräder ein extrem hohen Schwerpunkt -> geringere Schräglage bei gegebener Querbeschleunigung. http://www.mikrocontroller.net/attachment/79342/Schr_glage.png
Aber vielleicht ist ja ein 3D-Kompaßsensor drin...
Uhu Uhuhu schrieb: > Aber vielleicht ist ja ein 3D-Kompaßsensor drin... Der macht für sich alleine genommen noch nicht so viel Sinn, weil verschiedene Lagen die gleichen magnetischen Messwerte ergeben können. Auf die Neigungskorrektur kann man sich in einem beschleunigten System auch nicht verlassen. Man kann ihn aber verwenden um die Drift von Gyroskopen zum Teil zu kompensieren.
Michi schrieb: >> Sieh es so: Die Flüssigkeit erkennt keine Querkraft und bleibt deshalb >> im Glas. Warum sollte es dem Sensor anders gehen? > > Nein. Die Zentripedalkraft ist größer als die Massenkraft durch die > Erdbeschleunigung. Das ist nicht das Maßgebliche, sondern daß die Resultierende aus beiden Kräften senkrecht zum Glas steht. Welche der beiden Kräfte größer ist, spielt keine Rolle, sondern nur die Richtung, in die das Ergebnis zeigt, wenn du beide vektoriell addierst. Die Gewichtskraft zeigt senkrecht nach unten, die Zentripetalkraft 90° dazu zur Seite, un die Summe beider zeigt in Richtung der Achse Schwerpunkt <-> Kontaktpunkt zur Straße. >>> Problem: Je nach Motorrad, Reifen, Fahrerproportionen ist diese >>> Verhältnis anders und müsste parametrisiert werden. Wobei sich das bei >>> Änderung der Sitzposition, leerer werdenden Tank, ... wieder änder >>> würde. > >>Da ändert sich nichts, außer wenn der Fahrer sich zur Seite lehnt. > > Und wie! Darum hängen sich die Rennfahrer vom Motorrad (hanging off) > damit das Motorrad eine geringer Schräglage benötigt. Das ist mir schon klar. Ich schrieb doch, daß sich nichts ändert, außer wenn er sich zur Seite neigt. Reinhard R. schrieb: >> Und woran erkennst du, wann genau das Motorrad gerade ist? Man könnte >> höchstens einen Mittelwert bilden, unter der Annahme, daß man in einem >> für die Driftkorrektur ausreichend kurzen Zeitraum ungefähr >> genausoviele Linkskurven wie Rechtskurven fährt, was aber nicht >> unbedingt zutreffen muß. > > Den Zustand des Geradeausfahrens sollte sich bei einer entsprechenden > Instrumentierung erkennen lassen. Stimmt eigentlich. Dazu müßte man ja nur die Schräglage messen. Hmm, ach Mist... ;-) Man könnte allerdings im Stand einen Abgleich machen, denn dann kann der Sensor die Schräglage messen. Michi schrieb: > Schwerpunkt! > > So haben GP Rennmotoräder ein extrem hohen Schwerpunkt -> geringere > Schräglage bei gegebener Querbeschleunigung. > > http://www.mikrocontroller.net/attachment/79342/Sc... Ach jetzt sehe ich, worauf du hinaus willst. Bei Schräglage verschiebt sich auch die Querlage des Kontaktpunkts zur Straße und damit die Achse zwischen Schwerpunkt und Kontaktpunkt, wie man ja auf dem Bild eigentlich auch sehr gut sieht. Ich hätte allerdings nicht gedacht, daß diese Änderunng signifikant ist. Dann hättest du allerdings recht, daß dann auch die Höhe des Schwerpunkts und die Reifenbreite wichtig sind.
Rolf Magnus schrieb: > Reinhard R. schrieb: > >>> Und woran erkennst du, wann genau das Motorrad gerade ist? Man könnte >>> höchstens einen Mittelwert bilden, unter der Annahme, daß man in einem >>> für die Driftkorrektur ausreichend kurzen Zeitraum ungefähr >>> genausoviele Linkskurven wie Rechtskurven fährt, was aber nicht >>> unbedingt zutreffen muß. >> >> Den Zustand des Geradeausfahrens sollte sich bei einer entsprechenden >> Instrumentierung erkennen lassen. > > Stimmt eigentlich. Dazu müßte man ja nur die Schräglage messen. Hmm, ach > Mist... ;-) > Man könnte allerdings im Stand einen Abgleich machen, denn dann kann der > Sensor die Schräglage messen. Ich sehe schon, ich hätte spezifischer sein sollen. ;-) Ein Beispiel: Wenn die Winkelgeschwindigkeiten 0 sind, und der Beschleunigungsvektor (0,0,1)g lautet, kann man davon ausgehen dass das Motorrad eben steht oder mit gleichmäßiger Geschwindigkeit geradeaus fährt. Das gilt auch dann, wenn laut den integrierten (aber weggedrifteten) Winkeln der Fahrer samt Motorrad inzwischen einen Kopfstand machen müsste. ;-)
Michi schrieb: > Wie könnte so etwas funktionieren. Vielleicht mit 2 ESP Drehratensensoren? http://www.patent-de.com/20060706/DE102004060292A1.html Gruß Anja
Infrarot Schräglagensensor Dieser Sensor misst hochgenau den Abstand zwischen der Fahrbahn und dem Asphalt. Da sich in Schräglage der Abstand vom Anbringungsort zur Fahrbahn ändert, indiziert dieser Sensor sehr genau eben die Schräglage. http://shop.durbahn.de/shop/de/products/Sensoren_%26_Zubeh%C3%B6r/Sensor_Lean_Angle_-_Schr%C3%A4glage Inertial bank angle sensor United States Patent 5684244 In order to determine the direction and degree of bank of a motorcycle, a flywheel or other weight balanced at its center of mass is mounted on the motorcycle so that it is free to rotate about an axis parallel to the longitudinal axis of the motorcycle. As the vehicle banks, the flywheel will tend to maintain its position, and the angle of bank can be ascertained by measuring the direction and degree of rotation between the plane of the motorcycle and the flywheel. http://www.freepatentsonline.com/5684244.html
Stefan B. schrieb: > Infrarot Schräglagensensor > Dieser Sensor misst hochgenau den Abstand zwischen der Fahrbahn und dem > Asphalt. Da sich in Schräglage der Abstand vom Anbringungsort zur > Fahrbahn ändert, indiziert dieser Sensor sehr genau eben die Schräglage. > http://shop.durbahn.de/shop/de/products/Sensoren_%... Und wenn man in eine überhöhte Kurve fährt, versagt er kläglich...
Uhu Uhuhu schrieb: > Stefan B. schrieb: >> Infrarot Schräglagensensor >> Dieser Sensor misst hochgenau den Abstand zwischen der Fahrbahn und dem >> Asphalt. Da sich in Schräglage der Abstand vom Anbringungsort zur >> Fahrbahn ändert, indiziert dieser Sensor sehr genau eben die Schräglage. >> http://shop.durbahn.de/shop/de/products/Sensoren_%... > > Und wenn man in eine überhöhte Kurve fährt, versagt er kläglich... Kommt drauf an, was du als Schräglage definierst. Ist das der Winkel zur Fahrbahn, dann passt es. Ins Extrem getrieben: Du kennst doch diese 'Steilwand-Todesfahrer' die in eiem Zylinder ihre Runden drehen. Wieviel Schräglage haben die? Aus deiner Sicht: 90° Aus ihrer Sicht: 0° (oder zumindest sehr wenig)
> Und wenn man in eine überhöhte Kurve fährt, versagt er kläglich... Eigentlich nicht, es kommt halt auf das Bezugssystem an. Wenn du das Bezugssystem (bei diesem Sensor die Fahrbahn) auch kippst... BTW. http://www.pitts-todeswand.de/
Karl heinz Buchegger schrieb: > Aus ihrer Sicht: 0° (oder zumindest sehr wenig) Aus seiner Sicht hat ein Motoradfahrer imm er einen Neigungswinkel von 0° - anderenfalls fällt er auf die Schnauze.
Uhu Uhuhu schrieb: > Karl heinz Buchegger schrieb: >> Aus ihrer Sicht: 0° (oder zumindest sehr wenig) > > Aus seiner Sicht hat ein Motoradfahrer imm er einen Neigungswinkel von > 0° - anderenfalls fällt er auf die Schnauze. Ach Uhu, alter Wortklauber. Aus seiner Sicht liegt ein Motorradfahrer in der Kurve in einer Schräglage, er hat einen Winkel ungleich 90° zur Fahrbahn. Aus Sicht eines Fahrers in so einer Todeswand fährt er aber (fast) aufrecht und die Fahrbahn wölbt sich vor ihm nach oben. Sein Winkel zur Fahrbahn ist nahezu 90°. Entscheidend ist: Schräglage - in Bezug worauf?
Häh? Wenn sein Popometer dem Moppedfahrer inner Kurve eine 0° Schräglage indizieren würde, könnte (müsste) er mit dem Moppedfahren besser aufhören!
Irgendwie muß man sich jetzt aber auch die Frage stellen, wozu braucht man solchen Schrott. Keinen vernünftigen Motoradfahrer interessiert es,wie groß die Schräglage ist. Man will eigentlich nur möglichst schnell und elegant um die Kurve kommen und dabei hat man wirklich anderes zu tun,als auf den Schräglagenmesswert zu schauen. Oder ist das eine neue Variante der Schwanzverlängerung in dem man sagen kann "Hey da hinten in der Kurve hat ich 41,35° Schräglage" . Das ganze reiht sich nahtlos zu den schwachsinnigen Segnungen wie ABS und ESP und wie der ganze Schrott noch heissen mag. Grüße
Wenn Hasenöhrchen fürn Helm und Tankeinschußlöcher und LED-Ventilkappen gekauft werden, wundert mich garnix.
Karl heinz Buchegger schrieb: > Schräglage - in Bezug worauf? Genau das ist doch das Problem bei der ganzen Geschichte. In der Geometrie kann man Probleme oft durch geschickte Wahl des Koordinatensystems sehr vereinfachen. Warum nicht auch beim Motorradfahren?
a) es ist def ein beschleunigungssensor, mehr nicht. optisch...echt, leute. b) die bezugssystemproblematik führt auch gleich dazu, dass die starssenneigung eine wichtige rolle spielt, ob er die kurve mit dem gleichen winkel packt, oder nicht. Klaus.
Nur mal so aus Interesse in den Raum geworfen: Wie wäre es mit Lenkereinschlag und Geschwindigkeit messen? Evtl nur zum Stützen des Gyros?
> Irgendwie muß man sich jetzt aber auch die Frage stellen, wozu braucht > man solchen Schrott. Es verhindert vermutlich das die Fussrasten Kratzer bekommen. Es gibt so Typen die putzen andernd und da ist es vermutlich untertraeglich wenn die Raste mal auf den Boden kommt. Olaf
@Olaf Ja ein Fußrastenstreifwarner ! Wird sicher bald Vorschrift,dass den jeder haben muss! Grüße
Stefan B. schrieb: > Dieser Sensor misst hochgenau den Abstand zwischen der Fahrbahn und dem > Asphalt. Der ist meist sehr gering, oder? ;-) Gebhard Raich schrieb: > Irgendwie muß man sich jetzt aber auch die Frage stellen, wozu braucht > man solchen Schrott. Keinen vernünftigen Motoradfahrer interessiert > es,wie groß die Schräglage ist. Evtl. wäre es für irgendwelche Assistenzsysteme von Vorteil. Einfach nur zur Anzeige könnte ich es mir höchstens für den Rennsport zur Optimierung der Kurvenfahrt vorstellen, aber die werden wohl eh sowas haben. Für den normalen Straßenfahrer wird das aber völlig irelevant sein. > Oder ist das eine neue Variante der Schwanzverlängerung in dem man > sagen kann "Hey da hinten in der Kurve hat ich 41,35° Schräglage" . Das > ganze reiht sich nahtlos zu den schwachsinnigen Segnungen wie ABS und > ESP und wie der ganze Schrott noch heissen mag. Du hast wohl ABS und ESP nicht verstanden.
>Evtl. wäre es für irgendwelche Assistenzsysteme von Vorteil. Einfach nur >zur Anzeige könnte ich es mir höchstens für den Rennsport zur >Optimierung der Kurvenfahrt vorstellen, aber die werden wohl eh sowas >haben. Nein die haben das nicht. Über solcherlei Firlefanz können Rennfahrer nur lachen. >Du hast wohl ABS und ESP nicht verstanden. Kann sein. Ich weiss nur wie gefärlich ABS bei meiner Karre (Mercedes 290E)unter bestimmten, aber gar nicht seltenen Verhältnissen sein kann. Dem Fahrzeug dürfte eigentlich keine Betriebserlaubnis gegeben werden. Grüße
_Gast_XIV schrieb: > Nur mal so aus Interesse in den Raum geworfen: > > Wie wäre es mit Lenkereinschlag und Geschwindigkeit messen? Evtl nur zum > Stützen des Gyros? Das erfordert einen verhältnismäßig teuren und aufwendigen Einbau in das Motorrad und man muss auch ein wenig über die Geometrie des betreffenden Motorrads wissen (den Radstand zumindest). Andere Systeme, und um so eines handelt es sich vermutlich, braucht man theoretisch nur an einer von mehreren geeigneten Stellen befestigen, und sie funktionieren.
Reinhard R. schrieb: > Das erfordert einen verhältnismäßig teuren und aufwendigen Einbau in das > Motorrad und man muss auch ein wenig über die Geometrie des betreffenden > Motorrads wissen (den Radstand zumindest). Mag sein, wobei Lenkerstellung über ein Poti und Radstand über Trimmer einstellen scheint mir nicht sehr viel aufwendiger als das Gyro gefummel im 3D Raum > Andere Systeme, und um so eines handelt es sich vermutlich, braucht man > theoretisch nur an einer von mehreren geeigneten Stellen befestigen, und > sie funktionieren. Was ich eigentlich schreiben wollte: Reicht es nicht Kurvenradius und Geschwindigkeit zu messen um den Neigungswinkel ausreichend genau zu messen?
_Gast_XIV schrieb: > Was ich eigentlich schreiben wollte: > Reicht es nicht Kurvenradius und Geschwindigkeit zu messen um den > Neigungswinkel ausreichend genau zu messen? Nö. Man kann den gleichen Kurvenradius bei gleicher Geschwindigkeit mit unterschiedlicher Schräglage fahren... Drücken erhöht die Schräglage und Hangoff verringert die Schräglage. Je nach dem wie der Fahrer auf dem Ding turnen kann oder mag. Wenn es maximal mögliche Geschwindigkeit bei gegebenem Kurvenradius geht, ist der Wert Schräglage fast uninteressant. Die maximale Schräglage für die Maschine ist "bis was aufsetzt oder schleift", also wenn der physikalische Anschlag erreicht ist. Diese Schräglage kann man sich in Grenzen im Stand betrachten (abgesehen von Einfedereffekten) oder beim Kreisfahren auf dem Übungsplatz erfahren (Popometerkalibrierung). Der Laie kann dann die störenden, tiefhängenden Bauteile am Mopped entfernen, was beim Rennmopped eh schon erledigt wurde. Maximale Schräglage ist allerdings nicht das Ziel des Schnellfahrers, weil es instabilerer Fahrzustand ist. Deshalb sieht man Leute den Schwerpunkt verlagern (Hangoff), um mit geringerer Schräglage der Maschine zu fahren. Und/oder sie lenken anders (schnellerer Lenkimpuls, an definierten Punkten) ein, um die Kurve mit weniger Schräglage als maximal zu fahren. Wenn derart an der Kurventechnik gefeilt werden soll, würde ich Videoaufzeichnung und Zeitmessung vor einem solchen Sensor bevorzugen.
Lehrmann Michael schrieb: > Ist keine leichte Aufgabe - gerade die Kalmanfilter und generell das > DSP. was soll daran schwer sein? Brauchst doch nur den Messwert und eine halbwegs vernünftige Einschätzung des Mess- und Systemrauschens. In Fixpoint implementiert, kann das auch ein AVR locker rechnen, wenns nicht grad ein 10kHz Signal sein muss.
>Gebhard Raich schrieb: >> Irgendwie muß man sich jetzt aber auch die Frage stellen, wozu braucht >> man solchen Schrott. Keinen vernünftigen Motoradfahrer interessiert >> es,wie groß die Schräglage ist. >Evtl. wäre es für irgendwelche Assistenzsysteme von Vorteil. Einfach nur >zur Anzeige könnte ich es mir höchstens für den Rennsport zur >Optimierung der Kurvenfahrt vorstellen, aber die werden wohl eh sowas >haben. Für den normalen Straßenfahrer wird das aber völlig irelevant >sein. Man braucht so eine Schräglagensensor z.B. um eine Traktionskontrolle an einem Motorrad zu realisieren (Reifendurchmesser ändert sich mit der Schräglage). Hab gerade entdeckt, dass Bosch Motorsport so einen Sensor anbietet: http://www.bosch-motorsport.com/content/language2/html/3988.htm http://www.bosch-motorsport.com/pdf/sensors/lean_angle/LAS-1.pdf Auch in einen Serienmotorrad würde eine Traktionekontrolle sicherlich einige Leben retten. Ebenso wie es ABS und ESP getan hat. >Gebhard Raich schrieb: >Kann sein. Ich weiss nur wie gefärlich ABS bei meiner Karre (Mercedes >290E)unter bestimmten, aber gar nicht seltenen Verhältnissen sein kann. >Dem Fahrzeug dürfte eigentlich keine Betriebserlaubnis gegeben werden. Konkret?
Der Sensor von Bosch Motorsport misst laut Beschreibung die Längsbeschleunigung und zwei Drehraten. Das Motorsteuergerät MS 5 scheint daraus die Neigung zu berechnen. http://www.bosch-motorsport.com/pdf/sensors/lean_angle/LAS-1.pdf Ist wohl das, was weiter oben schon erwähnt wurde. >Vielleicht mit 2 ESP Drehratensensoren? >http://www.patent-de.com/20060706/DE102004060292A1.html >Gruß Anja
Gebhard Raich schrieb: > Kann sein. Ich weiss nur wie gefärlich ABS bei meiner Karre (Mercedes > 290E)unter bestimmten, aber gar nicht seltenen Verhältnissen sein kann. > Dem Fahrzeug dürfte eigentlich keine Betriebserlaubnis gegeben werden. Würde mich auch mal interessieren, warum ABS gefährlich ist? Ich kenn nur den Fall unterhalb von 6 (4?) kmh wo es nicht mehr anspringt und in besonderen Fällen wo das Blockieren dann Vorteile bringt, daß sich vor dem Reifen Material anhäuft und so die Haftreibung erhöht (Schotter / Schneematsch).
Ja, die Sache mit dem ABS ist folgende: Man fährt im Winter eine Straße entlang, Schneefahrbahn mit ausgefahrenen Spurrillen bis auf den Asphalt. Die rechte Spurrille ist durch Schmelzwasser vereist (kommt oft vor). Man latscht in die Eisen und es tut sich überhaupt nichts, einfach 0 Bremswirkung. Das ABS richtet die Bremswirkung aller Räder nach dem Rad mit dem geringsten µ aus, damit man wenigstens kerzengerade in die Katastrophe rast. Ohne ABS lenkt man beim Bremsen etwas nach rechts,um den Schiefzug durch nur links bremsende Räder auszugleichen. Man hat aber wenigstens ordentliche Bremswirkung. Als mir das das erste mal passiert ist, wär ich fast einem LKW aufgedonnert.Ich kann diesen Dreck bei meiner Karre nicht mal abschalten. Ob die ABS mittlerweile besser geworden sind, kann ich nicht sagen. Meiner Ansicht nach wäre nur eine Variante, bei dem jedes Rad mit maximalem Bremsmoment beaufschlagt wird, sinnvoll. Grüße
U.R. Schmitt schrieb: > Würde mich auch mal interessieren, warum ABS gefährlich ist? Ich kenn > nur den Fall unterhalb von 6 (4?) kmh wo es nicht mehr anspringt Also mein ABS wirkt runter bis auf 0. Da hab ich schön geschaut als ich im Schritttempo auf Schnee voll in die Eisen gelatscht bin, mein Bremspedal zu pumpen angefangen hat und wir beide wunderbar gemächlich langsamer geworden sind. Aber ich denke, das Hauptproblem sind die Leute, die nach dem Muster fahren: Ich hab ABS, ESP, LMAA ... mir kann nichts passieren. Und dann wundern sie sich warum sie in der Kurve trotz ESP rausfliegen.
>Das ABS richtet die Bremswirkung aller Räder nach dem Rad mit dem >geringsten µ aus, damit man wenigstens kerzengerade in die Katastrophe >rast. Ohne ABS lenkt man beim Bremsen etwas nach rechts,um den Schiefzug >durch nur >links bremsende Räder auszugleichen. Man hat aber wenigstens ordentliche >Bremswirkung. Eigentlich mildert das ABS den µ-split-Effekt sogar ab: Stichwort: Giermomentaufbauverzögerung http://de.wikipedia.org/wiki/Antiblockiersystem#Giermomentabschw.C3.A4chung Ich weiß natürlich nicht, ob diese Funktion beim Mercedes 290E umgesetzt ist weiß ich natürlich nicht. >Ich hab ABS, ESP, LMAA ... mir kann nichts passieren. >Und dann wundern sie sich warum sie in der Kurve trotz ESP rausfliegen. Die Unfallstatistiken sprechen Eindeutig für ABS, ESP ...
>Ich weiß natürlich nicht, ob diese Funktion beim Mercedes 290E umgesetzt >ist weiß ich natürlich nicht. Komischer Satz. ;-)
>Giermomentaufbauverzögerung
Ein schönes Wort fürwahr.Hat mein Benz mit Bj. 98 sicher nicht.Offenbar
will einem da noch die Elektronik sogar ins Lenkrad greifen ==> den Mist
sofort einstampfen!! Das Problem ist einfach, dass man aufgrund der
vielen unterschiedlichen Systeme nicht mehr weiss wie sich das Fahrzeug
im nächsten Moment verhalten wird. Das Schleudern an sich empfinde ich
als keinen gefährlichen Zustand, solange mir nicht eine wildgewordene
Bordelektronik dazwischenpfuscht.
Grüße
Gebhard Raich schrieb: > ABS richtet die Bremswirkung aller Räder nach dem Rad mit dem > geringsten µ aus, damit man wenigstens kerzengerade in die Katastrophe > rast. Ohne ABS lenkt man beim Bremsen etwas nach rechts,um den > Schiefzug durch nur links bremsende Räder auszugleichen. Nein. Wenn du auf einer Seite 0 Haftung hast, bringt es dir nichts "etwas nach rechts" zu lenken. Ohne ABS drehst du dich. Der Unterschied ist dann, daß du vielleicht ein paar wenige km/h verloren hast, dafür aber auch die Kontrolle und daß du dann irgendwie quer auf das Hindernis prallst, statt wenigstens mit der Knautschzone voraus. > Als mir das das erste mal passiert ist, wär ich fast einem LKW > aufgedonnert.Ich kann diesen Dreck bei meiner Karre nicht mal > abschalten. > Ob die ABS mittlerweile besser geworden sind, kann ich nicht sagen. Das ABS wird heute durch ESP ergänzt. > Meiner Ansicht nach wäre nur eine Variante, bei dem jedes Rad mit > maximalem Bremsmoment beaufschlagt wird, sinnvoll. Nein, die wäre das genaue Gegenteil von sinnvoll.
Also meines Wissens nach regelt ABS schon seit dem seligen W123er Benz (Baujahr annodazumal) mindestens die beiden Vorderräder getrennt ggf. damals noch die Hinterachse über einen Bremskreis, owohl wenn ich richtig drüber nachdenke, dann hatte das ABS schon damals für jedes Rad einen eigenen Kreis resp. eine eigene Druckleitung (4). Also war wohl eher auch über dem Teer eine dünne Eisschicht. Ohne ABS hättest Du dann das Vergnügen gehabt kreiselnd auf den LKW aufzuschlagen, wenn dein aktueller Aufschlagwinkel dann zufällig 90 Grad (mathematisch gegen den Uhrzeigersinn) gewesen wäre sprich Fahrertür voraus, dann könntest Du vieleicht heute gar nichts mehr schreiben. Das blöde am ABS bei glatten Verhältnissen ist daß man denkt da müßte doch mehr Verzögerung gehen, aber das tuts wirklich nicht.
>Wenn du auf einer Seite 0 Haftung hast, bringt es dir nichts >"etwas nach rechts" zu lenken. Ohne ABS drehst du dich. Unsinn, solange 2 Räder in Längsachse Traktion haben lässt sich noch (fast) alles beherrschen. >Das blöde am ABS bei glatten Verhältnissen ist daß man denkt da müßte >doch mehr Verzögerung gehen, aber das tuts wirklich nicht. Bei 80% der Verhältnisse(gleichmässig) bremst das ABS eh gut. Bei ca. 5% versagt es schlichtweg. Grundsätzlich möchte ich so wichtige Sachen wie eine Bremse nicht der Willkür einer MC Steuerung aussetzen. Wie wir alle wissen gibt es bei höherer Komplexität keine fehlerfreie Software.Es gibt immer Zustände, die der Programmierer nicht berücksichtigt hat und die dann ein unerwartetes Verhalten und mitunter eine Katastrophe auslösen. Grüße
Reinhard R. schrieb: > Den Zustand des Geradeausfahrens sollte sich bei einer entsprechenden > Instrumentierung erkennen lassen. Ich hab den Thread jetzt gerade nur überflogen, daher will ich nicht ausschliessen, dass es schon genannt wurde, aber dafür brauchst du nur einen Beschleunigungssensor in Richtung der Hochachse des Motorrades. Selbiger misst genau dann, und nur dann, exakt 1g, wenn das Motorrad aufrecht steht (bzw. ohne Beschleunigung fährt). In der Kurve ist die Beschleunigung höher, bei "schräger" Geradeausfahrt (also wenn der Fahrer sich weit zu einer Seite lehnt und das Rad zur anderen drückt) ist sie niedriger. Also kann man die Gyrodrift korrigieren, indem man den Winkel immer dann nullt, wenn der Beschleunigungssensor 1g anzeigt. Allerdings geht das nur bei bodengebundenen Fahrzeugen, bei einem Flugzeug würde das nicht funktionieren, da Flugzeuge auch Kurven mit exakt 1g fliegen können, allerdings ist eine solche Kurve immer mit einem Höhenverlust verbunden. Andreas
Gebhard Raich schrieb: >>Wenn du auf einer Seite 0 Haftung hast, bringt es dir nichts >>"etwas nach rechts" zu lenken. Ohne ABS drehst du dich. > > Unsinn, So Wörter wie "Unsinn" machen dich auch nicht glaubwürdiger. Vermutlich hat jeder von euch ein wenig Recht. >>Das blöde am ABS bei glatten Verhältnissen ist daß man denkt da müßte >>doch mehr Verzögerung gehen, aber das tuts wirklich nicht. > > Bei 80% der Verhältnisse(gleichmässig) bremst das ABS eh gut. Bei ca. 5% > versagt es schlichtweg. Haha, der war gut. Und ohne ABS? Klar, da schaffst du natürlich in jeder Situation (Stress, Reaktion) bessere Ergebnisse als mit ABS. Fahr im Winter doch einfach vorsichtiger, dann passiert das gar nicht ;) Nachdem mir auf der Autobahn mal jemand mit (wirklich, ungelogen) 1-2 Metern Abstand hinterhergefahren ist, obwohl ich gar nicht hätte schneller fahren können, da vor mir auch noch Autos waren, die gleich schnell waren (und derjenige auf mehrmaliges Hupen nicht reagiert hat) habe ich Drängler eh gefressen. Beim vorbeifahren zeigt der Trödel mir doch tatsächlich noch den Vogel. Leute gibts, unfassbar. Sowas sind dann die Kunden, die Massenunfälle verursachen auf der (zu dem Zeitpunkt dicht befahrenen Autobahn).
>Haha, der war gut. Und ohne ABS? Klar, da schaffst du natürlich in jeder >Situation (Stress, Reaktion) bessere Ergebnisse als mit ABS. Lies genau! Ich meinte damit, dass in 80% der Fälle das ABS besser bremst als ich es kann. Aber in 5% der Fälle (besonders im Winter bei schwierigsten Verhältnissen)kann ich's besser. Mir wäre es einfach recht, wenn ich es bei Bedarf ausschalten könnte - geht aber nicht. Grüße
Ja, aber selbst, wenn das ABS nur in 80% der Fällen besser als so ziemlich jeder normale Durchschnittsmensch ist, ist es doch ein Grund es zu benutzen. Selbst wenn es eben nicht in allen Lebenslagen eine Verbesserung ist. Beim Ausschalten haste die Gefahr, dass du es vielleicht mal wieder vergisst einzuschalten und dann haste den Salat.
Andreas Ferber schrieb: > Also kann man die Gyrodrift korrigieren, indem man > den Winkel immer dann nullt, wenn der Beschleunigungssensor 1g anzeigt. Das könnte aber z.B. auch passieren, wenn man in einer Kurve über eine Kuppe fährt. Simon K. schrieb: > Gebhard Raich schrieb: >>>Wenn du auf einer Seite 0 Haftung hast, bringt es dir nichts >>>"etwas nach rechts" zu lenken. Ohne ABS drehst du dich. >> >> Unsinn, > So Wörter wie "Unsinn" machen dich auch nicht glaubwürdiger. Vermutlich > hat jeder von euch ein wenig Recht. Man kann jedenfalls davon ausgehen, daß ABS-Entwickler mehr Ahnung von Fahrdynamik haben als Gebhard. Und eins werden die sicher nie tun, und zwar die Bremse abschalten, wenn es eine Möglichkeit gibt, ohne Verlust der Kontrolle zu bremsen.
Simon K. schrieb: > Ja, aber selbst, wenn das ABS nur in 80% der Fällen besser als so > ziemlich jeder normale Durchschnittsmensch ist, ist es doch ein Grund es > zu benutzen. Selbst wenn es eben nicht in allen Lebenslagen eine > Verbesserung ist. Eben. Airbags werden auch benutzt, auch wenn es einige Fälle gibt, in denen der Airbag selbst einen Insassen getötet oder schwer verletzt hat, der ohne Airbag vermutlich leicht oder unverletzt überlebt hätte. Das sind aber (sehr) wenige Fälle im Vergleich zu den vielen anderen, in denen der Airbag Tod oder schwere Verletzungen verhindert. Andreas
Irgendwie läuft die Diskussion jetzt aus dem Ruder...(ABS..) Also meine Meinung dazu: Beschleunigingssensor funktioniert überhauptnich. Wenn Du ohne Neigung mit dem Moppedl an der Ampel stehst, wohin geht die Beschleunigung? Ja, genau nach unten, vom Hintern weg. Wenn Du Dich mit Schmackes in due Kurve legst, wohin dann? Ja, fast genause direkt in den Sattel...... Quatsch zum Messen der Neigung! Weiss nicht warum Gyros zu teuer sein sollen? Die sind winzig, nicht übermaessig teuer und stecken mindestens zu zweit in jedem besseren Modellhubschrauber. Gruss Michael
Er legte sich in die Kurve -und blieb drin liegen.... ;-O MfG Paul
Hallo Leute Ich habe mir das mal durchgelesen und denke ihr macht einen Kardinalfehler! Das Ding ist von Polo und seine Ergebnisse sehr schwer zu Prüfen, weshalb ich bezweifle das es einigermaßen genau funktioniert! Ich gehe davon aus das ein Kompass die Drehgeschwindigkeit * misst in Kombination mit einem Gyrokreisel, und so einen theoretischen Wert der Schräglage abruft. Fahrbahn Neigung und anderer "Firlefanz" wird nicht berücksichtigt. Damit das Teil doch noch einige Käufer findet wird einfach mal eine Handvoll Grad dazu addiert ;-) * (bei 0Grad/Zeit = 0 Schräglage zum nullen des Gyrokreisel auf der Querachse) Mit einem Guten Navi und etwas Software für die wichtigsten Parameter (Reifenbreite, Schwerpunkt u.s.w.) könnten wohl ähnlich genaue Ergebnisse erzielt werden. Gruss
Hallo Ratende! Die Lösung zum Messen der Schräglage beim Motorrad besteht aus einem Gyro parallel zur Hochachse und dem Tacho für die Geschwindigkeit oder 2 Gyros, die 90° gegeneinander geneigt sind. Genaue Beschreibung findet ihr in meinen Patentanmeldungen beim DPMA 2003. Viel Spaß beim Kopieren, die Motorradleute haben es alle gemacht. Soviel zum Wert von Patenten! Rudolf Schubach
zur Patentschrift von R. Schubach Rudolf Schubach schrieb: > Hallo Ratende! > Die Lösung zum Messen der Schräglage beim Motorrad besteht aus einem > Gyro parallel zur Hochachse und dem Tacho für die Geschwindigkeit oder 2 > Gyros, die 90° gegeneinander geneigt sind. > Genaue Beschreibung findet ihr in meinen Patentanmeldungen beim DPMA > 2003. > Viel Spaß beim Kopieren, die Motorradleute haben es alle gemacht. > Soviel zum Wert von Patenten! > Rudolf Schubach Das Patent ist aber wegen Nichtzahlung der Gebühren ausgelaufen. Das schmälert nicht den Inhalt. Etwas mühsam zu lesen aber sehr informativ. Danke dafür.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.