Hallo Sorry das ich hier das Forum mit Fragen überschwämme, aber ich hab nunmal wirklich sehr wenig Ahnung und muss für ein Projekt etwas entwickeln. Und zwar muss ich folgendes erreichen. Ich möchte über einen Lan-Anschluss LED´s und Stellmotoren steuern. Es sollen zwei Gruppen von LED´s gesteuert werden. die eine Gruppe besteht aus insg. 9 HighPower LED´s, evtl. auch RGB die andere Gruppe besteht aus insg. 6 HighPower LED´s, evtl. auch RGB diese sollen unabhängig voneinander gesteuert (an;aus;dimmen(und evtl. Farbe)) werden können. außerdem muss ich mit dem Controller drei in Reihe(oder doch Parallel?) geschaltete Stellmotoren steuern. Alle drei Schrittmotoren sollen gleichzeitig das selbe tun, was lediglich drehen von einem definiteren Anfang zum vordefinierten Ende ist und das selbe natürlich auch umgekehrt. Verbaut werden Nema 23 Doublestack Motoren, für die ich dann noch die richtigen Daten wie Spannung und ob bipolar oder unipolar bräuchte. Software ist ereinmal egal. Hauptsache ich hab die Hardware fertig. Danke MfG Alex
Das ist zweifelsohne schön aber wie können wir dir denn helfen ? Du solltest präzise Fragen formulieren. Hast du schon Erfahrung mit Microcontrollern ? Ansonsten als Hobbybeschäftigung brauchst du sicher mehrere Monate um das umzusetzen. Bei Microcontrollern kann man schwer "nur" die Hardware entwickeln. Du brauchst Schrittmotorentreiber, Ethernet-Anschluss, LEDs, externe Taktquellen usw... Paralell heißts TCP/IP-Stack entwickeln.
Sowas wie das Pollin Net IO mit zusätzlicher Hardware für Motoren und LEDs würd mir jetzt mal spontan einfallen. Ethernut wäre evtl auch noch ein Stichwort.
Ich würd mal die Net I/O von Pollin studieren. Entweder dort die Hadrware Teile klauen, die beim Eigenbau Schwierigkeiten machen (höchst wahrscheinlich der Ethernet Treiber) oder aber gleich die Platine so wie sie ist übernehmen und überlegen, wie ich meine vorgegebene Hardware da drann kriege. > 9 HighPower LED´s, evtl. auch RGB Nicht eventuell. Das solltest du schon jetzt wissen. Für eine RGB LED brauchst du 3 Anschlüsse. Anstelle von 9 benötigst du auf einmal 27 Ausgänge. Das kann dir dein ganzes Hardware-Konzept über den Haufen schmeissen. Wenn du die LED dimmen willst, wäre zb. der Einsatz eines entsprechenden LED-Treibers in Betracht zu ziehen, der die dazu ntwendige PWM schon on Board hat.
habe keine erfahrung mit microcontrollern... für die hochschule müsste ich aber das oben genannte entwickeln! habe das hier gefunden: http://www.ledhilfe.de/viewtopic.php?f=31&t=6483 wenn ich das einfach nachbaue wäre das mit den led´s doch schonmal geschafft... wenn ich darüber auch noch die schrittmotoren steuern kann wär ich happy
Alex H. schrieb: > Sorry das ich hier das Forum mit Fragen überschwämme, aber ich hab > nunmal wirklich sehr wenig Ahnung und muss für ein Projekt etwas > entwickeln. Und warum musst du, wenn du wie du selbst sagst wenig Ahnung hast? Ansonsten ist das alles noch viel zu grau... Erzähl mal, was das im großen und ganzen werden soll. > Software ist ereinmal egal. Hauptsache ich hab die Hardware fertig. Gefährlicher Trugschluss! Die beiden gehen Hand in Hand.
Alex H. schrieb: > habe das hier gefunden: http://www.ledhilfe.de/viewtopic.php?f=31&t=6483 > > wenn ich das einfach nachbaue wäre das mit den led´s doch schonmal > geschafft... Und wie willst du damit deine 15(!) Led ansteuern. Das Ding dort kann 1(!) Led bearbeiten! Nein, sags nicht. Du willst 15 von den Platinen einsetzen. Das wär die typische "Ich hab mir für meine Diplomarbeit ein Thema gewählt von dem ich keine Ahnung habe und jetzt weiß ich nicht wo ich anfangen soll" Lösung. Der normale Entwickler würde eine Anzahl an Texas Instruments TLC5947 Bausteinen nehmen (24 Kanal LED Treiber, mit jeweils einer 12 Bit PWM) und da seine LED drann hängen. Soviele Bausteine wie nötig kaskadieren und mit 3 Pins am µC anschliessen. Dazu noch ein Standard Motortreiber Das ganze an ein Pollin Net I/O Board und zumindest die Hardware würde soweit stehen.
also es soll eine Leuchte gebaut werden, bei der man das Licht über PC;Mac;iPad;iPhone steuern kann. D.h. LED Gruppe 1 (9LEDs) an;aus;dimmen und LED Gruppe 2 (6LEDs) an;aus;dimmen Um die Lichtführung zu ändern wird ein Teil der Leuchte durch drei Stellmotoren, die alle gleichzeitig das Selbe tun verschoben. Verbaut wird eine Apple Airport Express Platine baugleich TM PCM2705. Über dessen Ethernet-Anschluss sollen die Geräte gesteuert werden. Der Pollin Net IO macht schonmal einen guten Eindruck, die Stromversorgung kann schonmal über den nicht belegten USB Anschluss am Airport Express erfolgen. Ich nehme jetzt KEINE RGB-LED´s mehr!
Alles klar. Ich hab auch grad deinen anderen Thread zur Spannungsversorgung gefunden. Ich kann dir folgendes sagen: du hast keine Chance, das selbst zu entwicklen. Das ist so. Du kannst fertige Komponenten kaufen und die verschalten. Wenn dir allerdings - wie im anderen Thread - 40 Eur schon als teuer vorkommen, werden dir beim Preis für Schmittmotortreiber die Augen übergehn. Alex H. schrieb: > Der Pollin Net IO macht schonmal einen guten Eindruck, die > Stromversorgung kann schonmal über den nicht belegten USB Anschluss am Nein. Spannung zu niedrig.
Michael H. schrieb: > Alles klar. Ich hab auch grad deinen anderen Thread zur > Spannungsversorgung gefunden. Ach, der war das! > Ich kann dir folgendes sagen: du hast keine Chance, das selbst zu > entwicklen. Das ist so. Full ACK. Das ist so als ob ich eine Mondrakete entwickeln müsste. Keine Chance
ja möchte fertige Komponenten (nach Anleitung verlöten kann ich ohne weiteres) kaufen und verschalten. ich weiß, dass die ganzen teile sehr teuer sind. deshalb muss ich halt schaun wo ich am besten sparen kann und deshalb hatte ich für die spannungsversorgung des TM PCM2705 nicht mehr als 40€ eingeplant. Super wäre jetzt wenn ich eine Liste mit den Teilen die ich benötige. Den Anfang macht der: Pollin Net IO Was brauch ich jetzt genau noch alles. Wäre super wenn ihr mir konkret Bauteile vorschlagt! Bin euch wirklich sehr sehr dankbar!
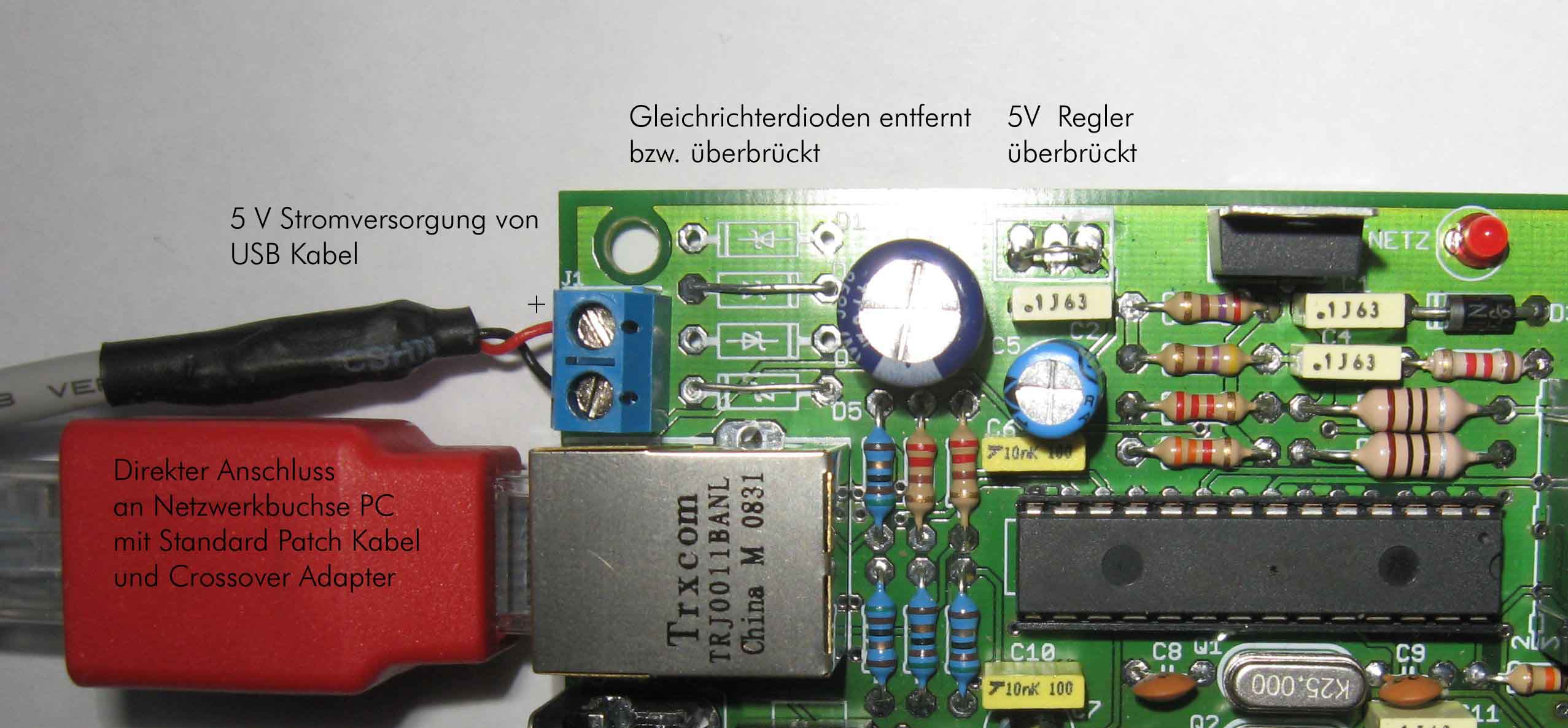
Michael H. schrieb: > Alex H. schrieb: >> Der Pollin Net IO macht schonmal einen guten Eindruck, die >> Stromversorgung kann schonmal über den nicht belegten USB Anschluss am > Nein. Spannung zu niedrig. hmm und was ist das dann http://www.mikrocontroller.net/wikifiles/8/82/POWER.JPG
Alex H. schrieb: >>> Stromversorgung kann schonmal über den nicht belegten USB Anschluss am >> Nein. Spannung zu niedrig. > > hmm und was ist das dann > http://www.mikrocontroller.net/wikifiles/8/82/POWER.JPG Eine Versorgung eines µC über USB. Aber: Du willst ja auch noch Motoren damit antreiben! Und die wollen ein bischen mehr Spannung/Strom als der USB Port bereit ist herzugeben. D.h. du brauchst sowieso dafür eine eigene Versorgung. Und da geht dann die Versogung des µC auch gleich mit. Kein Grund den USB Port damit zu belästigen.
ah ok danke für die info! kann garnicht sagen wie dankbar ich für eure Hilfe bin. euer geballtes wissen ist einfach super und ist doch schön wenn so absolute nullchecker für ein wirklich schönes projekt davon profitieren können oder?! also neben dem pollin net io, was brauch ich für die led und stellmotorsteuerung genau? auch was stromversorgung angeht. in welcher konfiguration muss ich die Nema 23 Doublestack Motoren bestellen (spannung und bipolar oder unipolar) und werden diese dann in reihe oder parallel geschaltet wenn sie alle gleich drehen sollen? dankedanke
Die solltest du alle seperat ansteuern und nicht in Reihe schalten. Hast damit dann auch nachher mehr möglichkeiten würd ich sagen. Für die LEDs solltest du mal nach passenden Treibern suchen, ist ja auch die Frage was du für LEDs nimmst.
Alex H. schrieb: > Michael H. schrieb: >> Nein. Spannung zu niedrig. > hmm und was ist das dann > http://www.mikrocontroller.net/wikifiles/8/82/POWER.JPG Eine Modifikation =) Richtig zuverlässig ist das trotzdem nicht, da aus USB auch mal 4,5V kommen können und damit der LM317 auf der Platine garantiert nicht mehr zu Recht kommt. Auch mit 5V ist er schon außerhalb der Spec des Datenblatts. http://www.mechapro.de/ Hier findest du Schrittmotortreiber.
Karl heinz Buchegger schrieb: > Das ist so als ob ich eine Mondrakete entwickeln müsste. Keine Chance Naja das ist aber wieder ein ein vergleich, ich weiss net :D Alex H. schrieb: > in welcher konfiguration muss ich die Nema 23 Doublestack Motoren > bestellen (spannung und bipolar oder unipolar) und werden diese dann in > reihe oder parallel geschaltet wenn sie alle gleich drehen sollen? Die Spannung musst du deinem Stepper-Treiber anpassen. An deiner Stelle würde ich die Bipolaren nehmen, die lassen sich etwas einfacher ansteuern. Wenn is den Eingangspost richtig verstanden hab, braucht du bei den Steppern nur zwei stellungen. Sagen wir einam den Linksanschlag und einemal den Rechtsanschlag. Du könntest jetzt einen der digitalen Ausgänge des Pollin Net I/O hernehmen und damit die Motoren über einen weiteren µC steuern. LOW heißt z.b. Linksanschlag und HIGH bedeutet dann Rechtsnaschlag. Die LEDs könntest du in einer Matrix verschalten um Pins zusparen. Oder du nimmst halt wie von den anderen vorgeschlagen, einen LED-Treiber mit PWM. Allerdings weiss ich da nicht wie die angesteuert werden. Aber denke das wird alles ziemlich schwierig sein für dich so etwas zu realisieren aber ich lass mich gern eines besseren belehren ;) Grüße Tobias
genau ich brauch die drei gereihten Schrittmotoren nur in zwei Stellungen! genau deshalb dachte ich auch das ich um einen Stepperdriver herumkomme?! zu den Led´s: Da werden wie gesagt zwei Gruppen (6&9) verbaut und es handelt sich um diese Led´s: Luxeon Rebel LED warmweiß 140lm/700mA auf 10mm Platine Lichtfarbe: warmweiß Lichtstrom: 77lm/350mA 140lm/700mA Herstellerbezeichnung: LXM3-PW71 Abstrahlwinkel: 160° Kelvin typ.: 3000k mA typ.: 350mA mA max.: 1000mA V typ. (350mA): 3,00V V typ. (700mA): 3,20V Welchen Led Treiber brauch ich da jetzt?
Wie wärs eig mit Servos anstatt Schrittmotoren? Deine LEDs werden ja keine 3kg wiegen. Servos wären wesentlich einfacher zu handhaben - erst recht bei nur 2 Positionen. Alex H. schrieb: > Welchen Led Treiber brauch ich da jetzt? http://www.google.de/images?hl=de&safe=off&tbs=isch%3A1&sa=1&q=power+led+driver+module&aq=f&aqi=&aql=&oq=&gs_rfai= Auf den maximalen Strom achten und dass die das Teil irgendwie dimmen kannst.
Michael H. schrieb: > Wie wärs eig mit Servos anstatt Schrittmotoren? Deine LEDs werden ja > keine 3kg wiegen. > Servos wären wesentlich einfacher zu handhaben - erst recht bei nur 2 > Positionen. handelt sich um schrittmotoren mit spindel und externer mutter. die stellungen sind bei 0mm(direkt am motor) und 130mm
ja ist fertig konstruiert... was fehlt sind die platinen und die stellmotoren (nema23 doublestack)
Alex H. schrieb: > Welchen Led Treiber brauch ich da jetzt? http://www.saelig.com/MLD/MLD002.htm Zum Bispiel.
Michael H. schrieb: > Alex H. schrieb: >> Welchen Led Treiber brauch ich da jetzt? > http://www.saelig.com/MLD/MLD002.htm > Zum Bispiel. hmm cool... wie sieht das da mit versand nach deutschland aus? (auch wenn meine eltern grad 50meilen von pittsford entfernt urlaub machen) ;-) hab dazu nix gefunden
Alex H. schrieb: > ja ist fertig konstruiert... was fehlt sind die platinen und die > stellmotoren (nema23 doublestack) Falscher ansatz ;) Erst überlegen wie man was macht und dann bauen. Nicht erst bauen und dann überlegen. Das gilt sowohl für das mechanische als auch für die elektronik... Nicht umsonst gibt es CAD-Programme :D Grüße Tobias
Da gibts ja noch den betreuenden Doktoranden, der sich das Konzept überlegt und dann einen Studenten sucht, der es für ihn baut. In den meisten Fälle sind die Leute da schon fähiger und überlegen sich keinen Mist. Schrittmotoren werden also ihre Gründe haben.
also ich befinde mich grade im masterstudiengang innenarchitektur mit schwerpunkt auf produktdesign. und wenn man ein produkt entwickelt steht nunmal funktion und design im vordergrund. ich habe genug platz für platinen gelassen und deshalb wird das, und so ist das meistens im produktdesign, wo es nunmal zu 90% aufs äußere ankommt als letztes angegangen. hier handelt es sich um eine weiterentwicklung der bachelorthesis eines kommilitonen. dieser prototyp (der zweite) wird auf messen ausgestellt werden und bei zahlreichen wettbewerben teilnehmen, da es sich um etwas sehr innovaties handelt. patentantrag läuft darum solls aber auch hier nicht gehen... die elektronik muss laufen. also soweit sind wir jetzt an den TM PCM2705 wird der pollin net io per lan angeschlossen an den 3 "Hi-Brightness LED Driver Module 700mA Constant Current" von saelig.com angeschlossen werden. An jeden dieser LED Driver kommen jeweils 6 Luxeon Rebel LED warmweiß 140lm/700mA. soweit dürfte das klappen, richtig? kommt jetzt noch der stepperdriver (wenn wir denn einen brauchen) der die drei in reihe geschalteten nema23ds von 0mm auf 130mm und zurück dreht. danke schonmal bis hierhin
Alex H. schrieb: > drei in reihe geschalteten nein nicht in reihe!!! Paralell... Alex H. schrieb: > kommt jetzt noch der stepperdriver (wenn wir denn einen brauchen) Du/ihr braucht einen Steppertreiber auf jeden fall, denn von alleine wird der sich nicht drehen und strom an, strom aus wird nicht reichen. Grüße Tobias
ok ich hatte mal gelesen, dass man bipolare stepper in reihe schalten sollte aber mir solls parallel natürlich auch recht sein... ihr seid die die die ahnung haben. konkrete vorschläge für stepperdriver?
Hier mal ein paar sachen zu schrittmotortreibern. Es läuft fast immer auf die L297 - L298 Kombi hinaus. Also H-Brücke/Motortreiber + Steppertreiber. Sehr anschaulich erklärt: http://www.strippenstrolch.de/4-0-5-schrittmotortreiber-erkunden.html Hier was allgemeines zu Schrittmotoren und ihrer ansteuerung mit ein paar schaltungs beispielen. Hier wird auch statt der L297 - L298 kombi ein L6205N-Motortreiber verwendet. Ansteuerung sollte aber identisch sein. Guckst du: http://www.rn-wissen.de/index.php/Schrittmotoren Hier im Wiki gibt es meine ich auch einen Artikel darüber, finden tue ich ihn aber gerade nicht. Gruß Tobias
>Hier mal ein paar sachen zu schrittmotortreibern. Es läuft fast immer >auf die L297 - L298 Kombi hinaus. Also H-Brücke/Motortreiber + >Steppertreiber. Museum plündern?
Mir ist immer noch nicht klar, warum das Schrittmotoren sein müssen. Normale Gleichstrommotoren, links und rechts ein Endschalter zur Erkennung der Endpositionen und gut ists. Die Endschalter müsst ihr ja sowieso verbauen (zumindest einen), also warum nicht einen 2-ten und einen einfach anzusteuernden Gleichstrommotor.
Karl heinz Buchegger schrieb: > Mir ist immer noch nicht klar, warum das Schrittmotoren sein müssen. > Normale Gleichstrommotoren, links und rechts ein Endschalter zur > Erkennung der Endpositionen und gut ists. > > Die Endschalter müsst ihr ja sowieso verbauen (zumindest einen), also > warum nicht einen 2-ten und einen einfach anzusteuernden > Gleichstrommotor. das kann ich jetzt nicht mehr ändern, da alle cnc teile fertig gefräst sind und nur die nema23ds reinpassen
Alex H. schrieb: > Karl heinz Buchegger schrieb: >> Mir ist immer noch nicht klar, warum das Schrittmotoren sein müssen. > > das kann ich jetzt nicht mehr ändern, da alle cnc teile fertig gefräst > sind und nur die nema23ds reinpassen Oh Mann Nichts gegen euch Designer. Aber ihr seid für mich die nächsten, die man nach den Architekten an die Wand stellen sollte. :-) Nichts ist vernünftig durchgeplant, aber Hauptsache es sieht gut aus.
Und wenn man Modellbauservos verbaut, spart man sich sogar Treiberschaltungen und Endschalter. Und die gibts von 1g bis 10kg und mehr. Angesteuert werden die über das sogenannte PPM Signal. Da muss man nur Energieversorgung und eine Signalleitung vom uC anschließen und fertig.
Alex H. schrieb: > das kann ich jetzt nicht mehr ändern, da alle cnc teile fertig gefräst > sind und nur die nema23ds reinpassen Man nehme Feile, Säge, Flex und Bohrmaschine und schon passt jeder Motor. Und aus ein paar Blechteilen dengelt man sich schnell eine schöne Abdeckung damit keiner sieht was man da gemacht hat.
irgendwie kriegen wir das auch mit den nema 23 ds schrittmotoren hin, also ist doch die diskussion die jetzt anfängt eher kontraproduktiv... müssen sowieso 15kg vertikal bewegt werden, wo servos dann auch nicht mehr wirklich mitkommen. heute bin ich durch eure hilfe schon weit gekommen. danke dafür! mit dem schrittmotor kriegen wir das auch noch hin!
Alex H. schrieb: > irgendwie kriegen wir das auch mit den nema 23 ds schrittmotoren hin, > also ist doch die diskussion die jetzt anfängt eher kontraproduktiv... Na, ja Als Techniker ärgert es uns, dass ihr euch anscheinend über alles mögliche Gedanken gemacht habt, nur nicht darüber, wie man die zugrundeliegende Technik realisiert. Wir sind halt gewohnt, dass man genau damit anfängt. Erst mal Vorversuche macht, das ganze in einem Testaufbau testet, die Kinderkrankheiten ausmerzt und erst dann anfängt sich über die Verpackung den Kopf zu zerbrechen. > müssen sowieso 15kg vertikal bewegt werden Jetzt bin ich aber auch neugierig. 15kg?
> müssen sowieso 15kg vertikal bewegt werden
Wie sollen die denn bewegt werden?
Hoffentlich habt ihr berechnet, was da für Kräfte auftreten.
Dabei sollte euch auch klar sein, dass man für große Motoren auch große
Treiber braucht -> einfach 1-2 ICs auf Lochraster reichen da nicht mehr.
Überhaupt solltest du dir überlegen, ob du für die Schrittmotoren nicht
auf eine fertige Endstufe zurückgreifen solltest.
Die Endstufe kannst du von deinem Atmega z.B. mit
Takt-/Richtungs-signalen ansteuern.
Verbaust du nur die Leistungstreiber, musst du Strommessung, PWM,
Schritterzeugung & Co. selbst programmieren.
Wenn es das Budget zulässt, sollte auch eine höherwertige Endstufe
eingesetzt werden, die Mikroschritt-fähig ist.
Ansonsten werden dir die Schrittmotoren sehr schnell sehr unangenehm
auffallen, hör dir dazu mal auf Youtube ein paar Videos von
Selbstbau-Fräsen mit Schrittmotoren an.
In der (vermuteten) Leistungsklasse wirst du um eigene Endstufen für
jeden Motor nicht herum kommen.
Auch bei kleinen Motoren solltest du darüber nachdenken, ansonsten
kannst du bei Parallelschaltung schnell die Grenzen von billigen
Treibern überschreiten.
Versuche bitte nicht, über Relais den gewünschten Motor an die Endstufe
zu schalten, wenn er fahren soll!
Erstmal hast du im Stillstand so keinen Haltestrom auf dem Motor, deine
Mechanik könnte sich also verschieben.
Viel schlimmer ist die Problematik, das ein solcher Motor eine große
Induktivität darstellt. Trennst du im Betrieb, schlimmstenfalls während
der Motor läuft, die Anschlüsse, ist der frühe Endstufen-Tod garantiert.
Kannst du Fotos oder Skizzen von der Mechanik einstellen, damit man sich
einmal ein Bild machen kann?
Wie ermittelst du eine Endlage, Blockieren, ... ?
Alex H. schrieb: > also ich befinde mich grade im masterstudiengang innenarchitektur mit ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^ > schwerpunkt auf produktdesign. ! Ich bin natürlich davon ausgegangen, dass du E-Technik o.ä. studierst... Da stellt sich mir aber die Frage, wie du in die missliche Lage kommst, die Schaltung entwickeln zu müssen. Stell das als Praktikum\Werkstudententätigkeit\Bachelor-Arbeit von mir aus bei deiner E-Technik-Fakultät aus und schon hast du einen, der die Arbeit gut und gerne macht. So, konkret für den Schrittmotor: http://www.mechapro.de/tinystep.html Das Ding nimmt dir alles ab. Alles, was du vorgibst ist ein Puls (Rechtecksignal) für einen Schritt und die Richtung für den Schritt. Außerdem kann das Teil in eine Endposition fahren. Siehe: http://www.mechapro.de/pdf/tinystep_doku.pdf
Da du ein Produktdesigner bist, hast du sicher schon an einen Schneckentrieb gedacht ;) Damit hat man normalerweise eine Übersetzung von 1:40 bis 1:60. Dass bedeutet dass man theoretisch mit einem Motor der normalerweise 1kg heben kann, 40 bis 60kg heben kann. Dabei wird sich wie immer beim Hebelgesetz, Kraft durch Weg erkauft. So ein Schneckentrieb hat noch einen weiteren, netten Vorteil. Solange man Eingängige Schnecken verwendet sind sie selbsthemmend. Dass bedeutet, dass bei ausgeschaltenem Motor die Last das Getriebe nicht drehen kann. Dadurch erspart man sich die Bremse oder den Haltestrom bei einem Schrittmotor. Desswegen wird der Schneckentrieb auch gerne bei Flaschenzügen, Werkstatt-Kränen und Winden eingesetzt. Wegen der Aussage dass ein spezieller Motor verwendet werden muss. Wenn der Konstrukteur klug war, hat er eine Möglichkeit vorgesehen dass der Motorflansch leicht und Kostensparend ersetzt werden kann. Denn was macht ihr wenn das Teil in Serie geht, und genau dieser Motor nicht mehr oder nur zu horenden Preisen verfügbar ist? Aber ihr habt leider das typische Designer-Phänomen: Die Funktion hat dem Design untergeordnet zu sein. Wo es früher ein simples Stück Blech getahn hat, muß jetzt alles Geschwungen sein. Dadurch steigen die Fertigungskosten extrem. Aber der Sparstift wird dann beim einfachen Personal angesetzt. Soweit meine guten Ratschläge. Da ihr aber wie's aussieht Scheuklappen aufhabt (immer nur den konventionellen Weg geht) und nicht inovativ arbeiten wollt, gebe ich dir einen Letzten Tipp: Wendet euch an einen Ausbildungsbetrieb im Bereich Elektronik /Mechatronik. Die können euch sicherlich weiterhelfen. Wenn ihr eine ordentliche Zusammenarbeit macht (Helft ihr uns, helfen wir euch) könntet ihr einigermaßen Kostengünstig arbeiten. Und wenn dass nicht klappt, wendet euch zumindest an einen Hobby-Bastler in eurem Bekanntenkreis. Der wird das Ganze sicherlich besser meitern als ihr. (Auch wenn bei Hobbybastlern die Arbeitsgeschwindigkeit etwas niedriger ist) Wenn du dass alles nicht wahr haben wollt, muss ich euch leider sagen dass euer Projekt entweder scheitert weil es unfertig in irgend einem Schrank verschwinden (an die nächsten Semester weitergereicht wird) oder so teuer wird, dass es keiner herstellen / vertreiben will.
@Barny: Jammerlappen? Ähnlich "durchdachte" Konstruktionen habe ich schon von angehenden Feinwerktechnik/MEchatronik-Ingenieuren gesehen. Ich sehe meine Aufgabe als Ingenieur darin, Sachen, die andere verbockt haben, gerade zu biegen. Wann dieses "Geradebiegen" einsetzt, ist unterschiedlich. Teilweise kann man schon ganz am Anfang mitwirken, teilweise aber erst ziemlich spät, wenn der Karren schon (fast) im Dreck steckt. Ich bin mir sicher, dass man Alex Problem relativ einfach lösen kann. Da es sich um einen Prototypen/Messemuster handelt, wird er auch eher ungern Details verraten - das kann ich verstehen. Vielleicht sollte er aber mal überlegen, ob er sich nicht vielleicht doch mit jemandem, der mehr Ahnung von der Materie hat, zusammensetzen, und das nicht hier im Forum diskutieren.
Angehängte Dateien:
-

Anschluss.jpg
75 KB
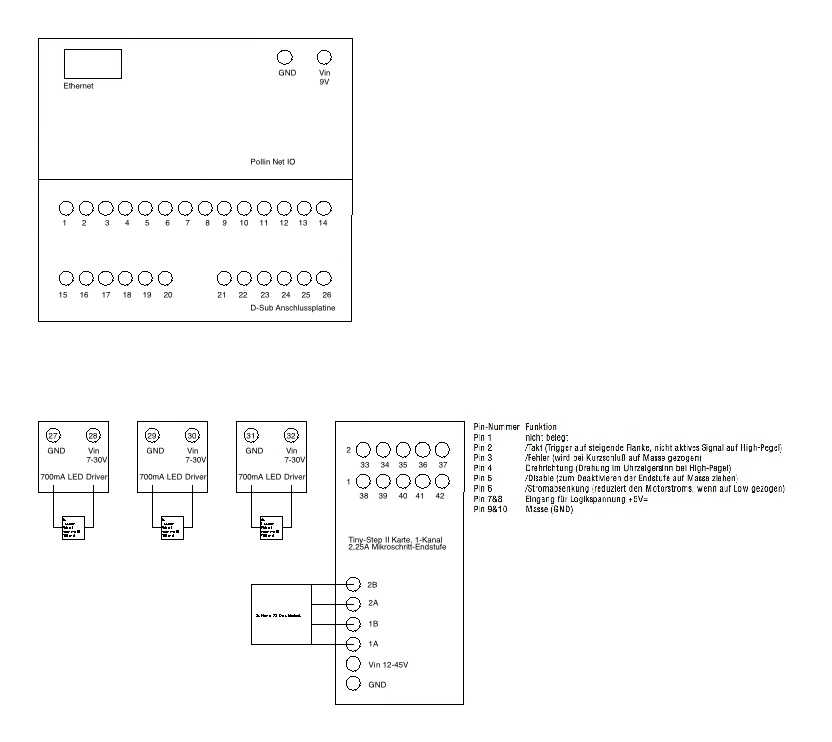
diskussionen hin oder her, wir haben es doch jetzt fast hardwaretechnisch. hab mal fix ne grobe übersicht über die anschlüsse gezeichnet. da wärs super wenn ihr mir helfen könntet, welcher pin mit welchem verbunden werden muss und wie ich die eingangsspannung von 7-30V bei den LED Treibern realisieren kann. kommen wir zu den drei parallelen nema 23 Doublestack schrittmotoren... die kann ich in 2,1V ; 2,33V ; 2,5V ; 2,85V ; 3,25V ; 5V ; 7,5V ; 12V bestellen... die tiny step II endstufe ist aber für schrittmotorspannungen von 15-35V. in welcher ausführung soll ich die motoren bestellen und mit wieviel Volt (12-45V) soll ich die Endstufe versorgen?
ah ok ich hab noch das 32V/3A Netzteil vergessen oder brauche ich das nicht? wird die logikspannung aus dem net io geholt?
STK500-Besitzer schrieb: > @Barny: Jammerlappen? > Ähnlich "durchdachte" Konstruktionen habe ich schon von angehenden > Feinwerktechnik/MEchatronik-Ingenieuren gesehen. > Ich sehe meine Aufgabe als Ingenieur darin, Sachen, die andere verbockt > haben, gerade zu biegen. > Wann dieses "Geradebiegen" einsetzt, ist unterschiedlich. Teilweise kann > man schon ganz am Anfang mitwirken, teilweise aber erst ziemlich spät, > wenn der Karren schon (fast) im Dreck steckt. Nö. Aber ich habe es jeden Tag mit dieser Spezies zu tun. Die meißten kommen nicht wenn der Karren im Dreck steckt. Sie warten so lange bis er schon zugewuchert ist. Nach dem Motto: Hier ist der Entwurf. Nächste Woche sollen die Prototypen laufen uns in 3 bis 4 Wochen gehen wir in Serie und liefern aus. Da wird leider oft lieber eine kleine Änderung nicht gemacht weil sie so teuer ist und dafür das mehrfache ausgegeben um es trotzdem zum Laufen zu bekommen. @ Alex H. Auf dem Bild kann man leider nicht viel erkennen. Aber was wohin kommt, könnt ihr den Datenblätter des Pollinboards und des Motortreibers entnehmen. Ich würde übrigens ein seperates Netzteil für die Pollinplatine verwenden. Denn 32V sind für den armen Spannungsregler doch ziemlich viel. Verwendet da lieber ein 9V Steckernetzteil. Vergesst aber nicht die Massen der beiden Netzteile zu verbinden.
Alex H. schrieb: > diskussionen hin oder her, wir haben es doch jetzt fast > hardwaretechnisch. Richtig. Finde ich gut, dass du dich nicht weiter ablenken lässt. > hab mal fix ne grobe übersicht über die anschlüsse gezeichnet. Das schaut ja schon mal gut aus. Nur winzig. Speicher das doch mal als .png oder .pdf in ordentlicher Auflösung. > da wärs super wenn ihr mir helfen könntet, welcher pin mit welchem > verbunden werden muss Folgendes muss an einen I/O des Mikrocontrollers: - PWM-Eingäge der LED-Treiber - Alle Ein-/Ausgänge der Schrittmotortreiber bis auf den Not-Aus Wie du schnell merkst, reicht da das Pollin-Board so nicht. Da sind dann Programmierkenntnisse gefragt. Wie steht es mit deinen Programmierkünsten? Speziell C. > und wie ich die eingangsspannung von 7-30V bei den > LED Treibern realisieren kann. Was hast du denn zur Verfügung? Ich würde ein dickes Netzteil für Schrittmotoren, LEDs und evtl Pollin-Board vorsehen. > kommen wir zu den drei parallelen nema 23 Doublestack schrittmotoren... > die kann ich in 2,1V ; 2,33V ; 2,5V ; 2,85V ; 3,25V ; 5V ; 7,5V ; 12V 12V. Wenig strom -> klein und günstig. > bestellen... die tiny step II endstufe ist aber für > schrittmotorspannungen von 15-35V. Die Limitierung nach unten verstehe ich nicht. Laut Datenblatt des Treiber-ICs sind Spannungen bis 8V geeignet. http://www.datasheetcatalog.org/datasheet/allegromicrosystems/3977.pdf > in welcher ausführung soll ich die motoren bestellen und mit wieviel > Volt (12-45V) soll ich die Endstufe versorgen? 12V klingen doch gut. Geläufig -> günstig.
Angehängte Dateien:
-

anlage.png
40 KB
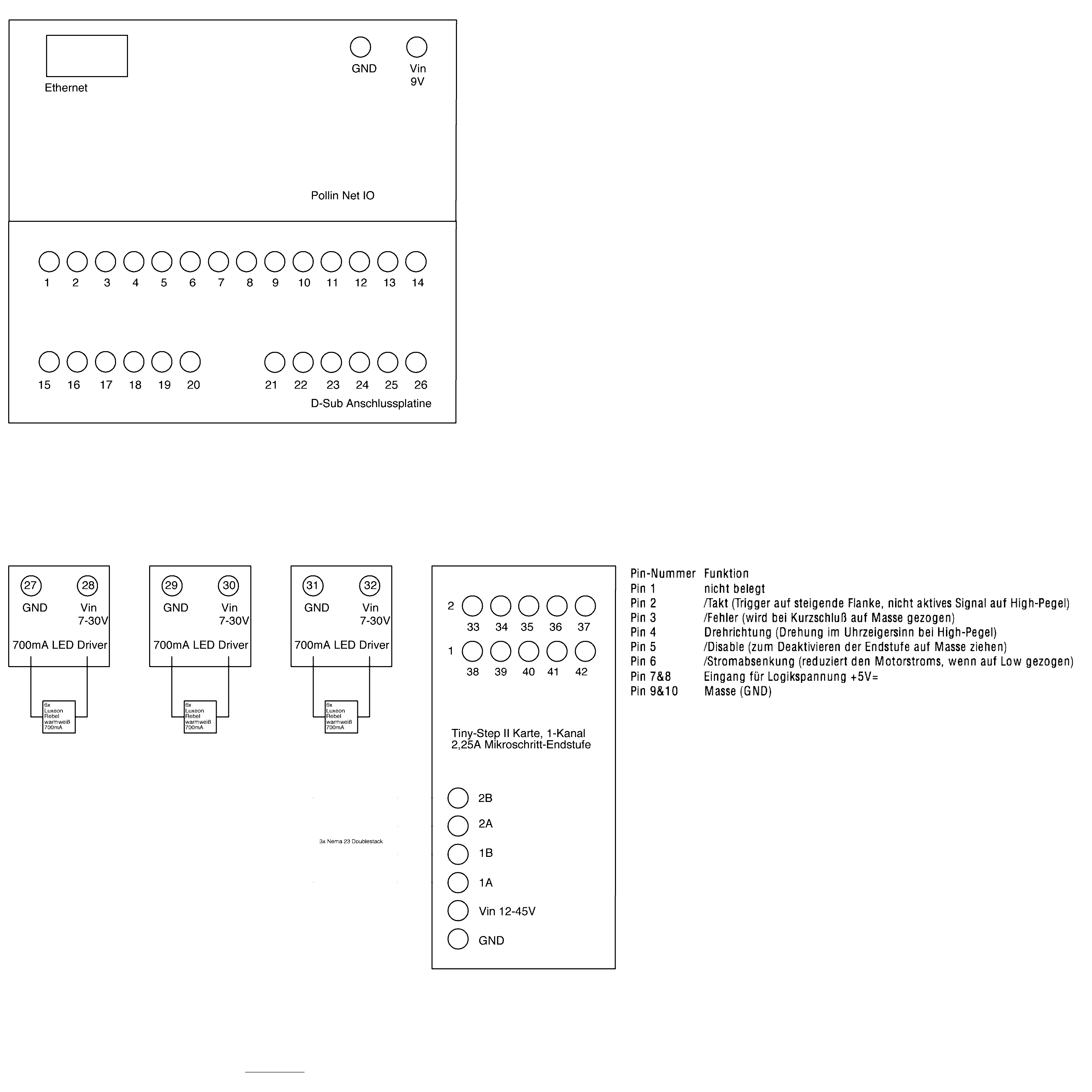
Hier nochmal dein Bild. Allerdings im passenden Format und mit 3,5% der Dateigröße.
Angehängte Dateien:
-

lw01_shema.jpg
78 KB
{kind=link}
ok nochmal zum verstehen, mit dem risiko euch den letzten nerv zu rauben (bin wirklich sehr dankbar) ich kaufe die nema 23 stellmotoren in 12V Bipolar Ausführung und verbinde diese parallel und verbinde sie mit der tinystep II ich nehme den avr net io und versorge den mit 9V DC dann nehme ich die tiny step II endstufe und versorge die auch 12V DC (lasse also dieses auf mechapro empfohlene 32V/3A netzteil weg) die masse der beiden verbinde ich. die 10kontakte der tinystep II verbinde ich mit den 10 dazu passende kontakten auf der sub-d anschlussplatine (wenn mir jemand dabei hilft wärs super, nicht das ich was falsch mache) schrittmotorsteuerung ist also fertig! nun zu den 3 led treibern (zeichnung im anhang)... wie krieg ich die an die sub-d platine? so einfach mit + und masse ist das ja nicht, da diese mit 7-30V betrieben werden?! Michael H. schrieb: > Folgendes muss an einen I/O des Mikrocontrollers: > - PWM-Eingänge der LED-Treiber > - Alle Ein-/Ausgänge der Schrittmotortreiber bis auf den Not-Aus > Wie du schnell merkst, reicht da das Pollin-Board so nicht. Was meinst du damit, dass das Board nicht reicht?
Alex H. schrieb: > Michael H. schrieb: >> Folgendes muss an einen I/O des Mikrocontrollers: >> - PWM-Eingänge der LED-Treiber >> - Alle Ein-/Ausgänge der Schrittmotortreiber bis auf den Not-Aus >> Wie du schnell merkst, reicht da das Pollin-Board so nicht. > > Was meinst du damit, dass das Board nicht reicht? a) Zähl ab, wieviele Eingänge du versorgen musst. b) Zähl ab, wieviele Ausgänge das Pollin Board hat. Wenn a) größer als b) ist, dann hast du ein Problem. > die 10kontakte der tinystep II verbinde ich mit den 10 dazu > passende kontakten auf der sub-d anschlussplatine > (wenn mir jemand dabei hilft wärs super, nicht das ich was falsch > mache) Es gibt keine 'dazu passenden' Kontakte. Der Programmierer sucht sich aus, welchen Pin der tinystep er an welchem Ausgang des Pollin-Boards er sehen möchte und berücksichtigt das dann in seinem Programm. > schrittmotorsteuerung ist also fertig! Dann geht der Spass erst los! > nun zu den 3 led treibern (zeichnung im anhang)... > wie krieg ich die an die sub-d platine? so einfach > mit + und masse ist das ja nicht, da diese mit 7-30V betrieben > werden?! So wie immer: Eine Stromversorung im gewählten Spannungsbereich muss her. Ihr + kommt an das Plus von der Platine, ihr - kommt an das - von der Platine und zuätzlich werden dann auch noch die Massen dieser Stromversorgung und die vom µC-Board verbunden, damit sie den gleichen Bezugspegel haben. Ihr solltet euch wirklich jemanden dazunehmen, der wenigstens die Grundlagen Elektrotechnik kennt.
oh man ich mag mich garnicht trauen zu fragen. also das pollin board hat 8 digitale ausgänge. wieviele eingänge hab ich denn zu versorgen? ja ich weiß, schande über mein haupt aber ich bin nunmal blau hinter den ohren
Schrittmotoren parallel ist, wie schon erwähnt, keine gute Idee!!! Nicht zuletzt kannst du dadurch Probleme mit der Regelung moderner Endstufen bekommen. Deine "Die schrittmotorspannungen von 15-35V" beziehen sich auf die *Betriebs*spannung der Endstufe. Diese hohe Spannung wird verwendet, um die Spulen der Motoren schnell genug mit ausreichend Strom zu versorgen und der Induktivität entgegen zu wirken. Der Strom in den Motorspulen wird geregelt und ist viel wichtiger, als die Spannung! Die Endstufen sollten also sehr wohl mit der empfohlenen (hohen) Spannung versorgt werden, um die Motoren optimal und ohne Schrittverlust betreiben zu können. Mache dich mal mit den Grundlagen von Schrittmotoren vertraut, die unterscheiden sich in einigen wichtigen Punkten von normalen Motoren! Wie bereits gefragt: Wie erkennst du, wenn die Mechanik eine Endlage erreicht? Was passiert, wenn die Mechanik blockiert? Reißt sie dem Bediener dann einen Finger ab?! Zur Ansteuerung deiner LED-Treiber: Schau bitte in der Anleitung/Datenblatt nach, ob die Treiber einen Enable-Pin o.ä. besitzen. Ansonsten musst du die Betriebsspannung der Treiber schalten, musst also weitere Schaltstufen vorsehen. Geeignet ist je nach gewünschter Schaltgeschwindigkeit z.B. einfache Relais oder ein Logik-Level Mosfet. So einfach wie du es dir vorstellst, ist es leider nicht. Hier möchte keiner deine Kompetenz in Frage stellen oder dich lächerlich machen. Es ist nur so, dass dein Aufbau schon weit höhere Anforderungen stellt wie eine LED + Vorwiderstand zum Blinken zu bringen. Außerdem möchtest du wahrscheinlich, das dein Aufbau so gut funktioniert wie er aussieht. Die Technik dazu ist bei den gestellten Anforderungen leider recht komplex...
Leo-Andres schrieb: > Zur Ansteuerung deiner LED-Treiber: > Schau bitte in der Anleitung/Datenblatt nach, ob die Treiber einen > Enable-Pin o.ä. besitzen. > Ansonsten musst du die Betriebsspannung der Treiber schalten, musst also > weitere Schaltstufen vorsehen. > Geeignet ist je nach gewünschter Schaltgeschwindigkeit z.B. einfache > Relais oder ein Logik-Level Mosfet. Ich hab mir die mal kurz angesehen (mehr drübergelesen). Da dürfte im Grunde eine Konstantspannungsquelle verbaut sein. AUf jeden Fall sagt der Hersteller: man kann mit einer PWM draufgehen. (In seiner Übersichtszeichnung ist ja wieder nur die Hälfte eingezeichnet. Den Steuereingang hat er unterschlagen) http://www.saelig.com/MLD/MLD002.htm Die LED-Module dürften kein Problem aufwerfen, ausser natürlich, dass irgendwo die Spannung herkommen muss. Edit: Der Satz in der Beschreibung * Constant Current 700mA (custom values possible) bereitet mit allerdings Bauchschmerzen. Heißt das, ich kann mir die 700mA selber konfigurieren oder heißt das ich kann die Module bei denen auch für andere Ströme bestellen?
also muss ja nicht umbedingt der pwm led treiber sein... bin für vorschläge offen ich brauch nur min. zwei Treiber die jeweils min. 6 der oben genannten 700mA Luxeon LED´s schaffen. und nochmal, auch wenn ich mich blamiere... wieviele eingänge hab ich zu versorgen? wieviele der auf dem net io 8 verfügbaren gehen für den tiny stepp 2 drauf und wieviele braucht jeweils ein led treiber?! dann wars das auch schon... mit den gesammelten infos hat mich der thread schon weit gebracht.
Alex H. schrieb: > wieviele eingänge hab ich denn zu versorgen? SChau dir deine Karten an Das sind erst mal die 3 LED-Treiber Jede braucht ein Steuersignal Dann noch der Motortreiber. Du hast so schön dazukopiert, welche Pins es da gibt. Geh sie durch. Welcher Pin klingt nach (aus Sicht des Motor-treibers) einem Eingang Takt yep, Wenn der Schrittmotor einen Schritt machen soll, muss hier ein Puls reingeschickt werden. Also: µC -> Motortreiber Fehler no, Damit meldet die Karte, dass es einen Fehler gibt zb Strom überschritten, heiss gelaufen, ... Also: Motortreiber -> µC Drehrichtung ist wohl ziemlich eindeutig Also: µC -> Motortreiber Disable damit kann der µC den kompletten Treiber abschalten Also: µC -> Motortreiber Stromabsenkung damit kann man offenbar vorgeben, dass die Motoren mit weniger Strom angesteuert werden sollen Also: µC -> Motortreiber Du hast also nach bisheriger Rechnung 3 + 4, macht 7 Eingänge zu versorgen. Hast du auf der µC Platine genügend Eingänge? Da ist 1 vom Motortreiber (Fehler) + 2 Eingänge für die Endschalter
Alex H. schrieb: > dann wars das auch schon... mit den gesammelten infos hat mich der > thread schon weit gebracht. und genau das ist das was mir Bauchschmerzen und Sorgen macht. Du hast es hier offenbar nicht mit einem 'etwas besseren Lego Aufbau' zu tun. 15kg sind schon kein Pappenstiel. Auch die zu beherrschenden Ströme sind kein Pappenstiel. Du agierst aber wie jemand der gerade mal einen Bleistift unfallfrei halten kann und damit ein 5-stöckiges Haus planen möchte. Ich hoffe ihr habt wenigstens jemanden, der programmieren kann. Sonst ist es nämlich ganz schnell zappenduster. Und nein, das funktioniert nicht nach dem Muster: Einfach alles zusammenstecken, Setup starten, läuft.
Karl heinz Buchegger schrieb: > Du hast also nach bisheriger Rechnung 3 + 4, macht 7 Eingänge zu > versorgen. > > Hast du auf der µC Platine genügend Eingänge? > Da ist 1 vom Motortreiber (Fehler) + 2 Eingänge für die Endschalter reicht dann doch oder bin ich zu blöd der net io hat ja 8 dig. ausgänge und 4 dig. eingänge wenns nicht reichen sollte kann ich doch theoretisch auch zwei net io an nen ethernetswitch hängen, einer für die led´s und der andere für den tiny stepper aber muss doch nicht da es reicht?!
Ähm. Wie hast du dir eigentlich vorgestellt, dass du mit deinen 3 LED Modulen die Luxeon LED ansteuerst? Die wollen ja 700mA ... jede Einzelne!
Karl heinz Buchegger schrieb: > Ähm. > Wie hast du dir eigentlich vorgestellt, dass du mit deinen 3 LED Modulen > die Luxeon LED ansteuerst? > > Die wollen ja 700mA ... jede Einzelne! da haste recht... hab ich ganz übersehen... also brauchen wir nen anderen treiber
Alex H. schrieb: > Karl heinz Buchegger schrieb: >> Ähm. >> Wie hast du dir eigentlich vorgestellt, dass du mit deinen 3 LED Modulen >> die Luxeon LED ansteuerst? >> >> Die wollen ja 700mA ... jede Einzelne! > > da haste recht... hab ich ganz übersehen... also brauchen wir nen > anderen treiber Mein Fehler. Das passt schon. Du kannst ja (bei genügend hoher Versorgungsspannung) bis zu 7 LED in Serie schalten. Du musst nur eine genügend hohe Versorungsspannung haben: Spannung > 6 * was_jede_einzene_LED_Haben_will
Alex H. schrieb: > reicht dann doch oder bin ich zu blöd > der net io hat ja 8 dig. ausgänge und 4 dig. eingänge Du hast doch mehr als einen Schrittmotor, oder? > wenns nicht reichen sollte kann ich doch theoretisch auch zwei net io an > nen ethernetswitch hängen, einer für die led´s und der andere für den > tiny stepper WAH! Nein, das ist eine reine Softwareangelegenheit.
Beantworte doch bitte mal die gestellten Fragen! Langsam frage ich mich, wofür man dir überhaupt antwortet @thrill-seeker! An das Projekt gehst du relativ leichtsinnig heran, mit so einer "wenn ich den Sub-D Stecker unfallfrei belegt habe, wird sich das System von selber in Gang setzen"-Einstellung. Wirklich schade um das Projekt, mit etwas Erfahrung könnte man es sehr schön und auch relativ einfach umsetzen. Diese Erfahrung bekommst du hier im Dutzen nachgeworfen, gehst aber nicht annähernd darauf ein. Das mehrere Net-IO Unsinn³ sind, wurde übrigens zig Beiträge weiter oben erwähnt. Was einmal mehr den Schluss nahelegt, dass du viele Beiträge hier nur halb liest und dir den Rest im stillen Kämmerlein hinwurstelst, leider teilweise kolossal falsch.
Barny schrieb:) > > Wenn du dass alles nicht wahr haben wollt, muss ich euch leider sagen > dass euer Projekt entweder scheitert weil es unfertig in irgend einem > Schrank verschwinden (an die nächsten Semester weitergereicht wird) oder > so teuer wird, dass es keiner herstellen / vertreiben will. Da wollte es wer nicht wahr haben ;)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.