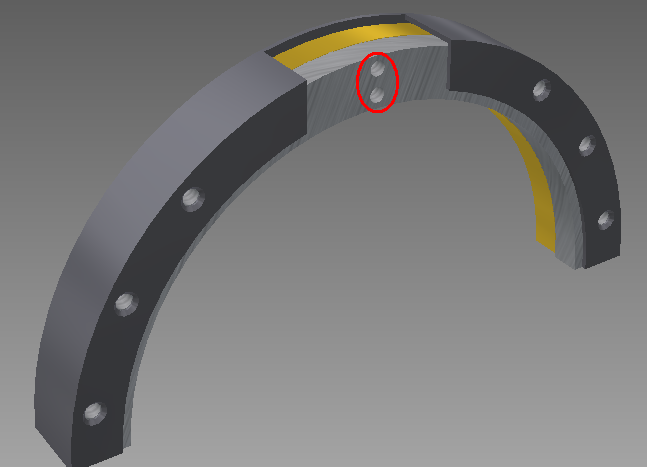
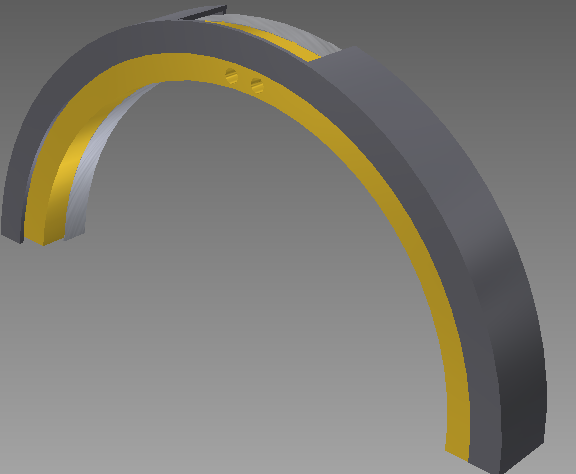
Hallo zusammen. Ich habe vor, den Drehwinkel zu messen, den ein Unterarm machen kann. Also ein Klettverschluss nahe Ellenbogen und eins am Handgelek. Diese will ich mit Metall so verbinden, dass ich so einfach wie möglich den Winkel messen kann. Ich habe mir das in etwa so vorgestellt, dass ein Metallstreifen vom Ellenboden an die auf Bild 1 sichtbaren 2 Löcher geschraubt wird und auf der anderen Seite ein zweiter Metallstreifen vom Handgelenk an die beiden Löcher geschraubt wird, die auf Bild 2 zusehen sind. Der Halbring auf der Seite vom Handgelenk (golden) könnte so ein halbes Zahnrad sein, das durch ein 10-Wege-Poti (befestigt an der anderen Seite) und aufgestecktem, passenden Zahnrad den Winkel misst. Der Poti ist an die Versorgungsspannung angeschlossen und der Mittelabgriff wird mit einem ADC digitalisiert um mit Hilfe von 2 Kalibrierwerden den Winkel auszurechnen. Die Auswertung würde ich mit dem 8pol. PIC12F1822 machen, denn er hat die Funktionen vom I²C-Slave, ADC, TTL-In (Kalibrierknopf), TTL-Out (LED) nebeneinander. Es kommen noch mehrere IC's/Sensoren dazu, deshalb der I²C-Slave. Man kann mit dem Poti schön einen Analogen Wert machen, der, soweit ich weiß, recht linear und somit durch 2 Kalibrier-Winkel gut berechenbar ist. 10-Wege-Poti, weil das Zahnrad am Poti viel kleiner ist und es deshalb sich deshalb schneller dreht als das Große. Das ist zwar nicht das Gelbe vom Ei, aber es soll so einfach und billig und genau sein, wie es geht. Hat jemand noch eine andere/bessere Idee? Vielen Dank für ernst gemeinte Vor-/Ratschläge! PS: Der Arm soll in jeder Lage (nach vonre/oben/unten gestreckt, Ellenbogen angewinkelt oder nicht) messbar sein. PPS: Bitte keine Antworten wie "lass es einfach sein" oder so.
Angehängte Dateien:
-

Bild1.PNG
46 KB -

Bild2.PNG
28 KB -

von_unten.PNG
48 KB
Du willst also so etwas wie einen Elektrogoniometer bauen... http://www.google.de/search?q=%22humeroulnar+joint%22+angle+measurement http://www.scribd.com/doc/12390543/measurement-of-joint-motion-a-guide-to-goniometry aber anders als üblicherweise mit externer Digitalisierung/Messung von Referenzpunkten auf dem Arm mit einem 3D-Digitalisierarm (http://www.orthosupersite.com/view.aspx?rid=27092) soll dein Messgerät vom/am Untersuchungsobjekt getragen werden. Interessant. An deiner Stelle würde ich den Aufbau mal als Machbarkeitsstudie machen. Unklar ist mir, ob deine einfache Winkelmessung reicht oder ob von der Anatomie her noch eine zusätzliche Drehbewegung des Unterarms dazu kommt. Bzw. eine solche Drehbewegung durch deinen Aufbau behindert würde. Statt aufwändiger Metallbearbeitung würde ich allerdings bei der Machbarkeitsstudie auf schnellere, einfachere Baumaterialien zurückgreifen z.B. Epoxidknete usw. Und messtechnisch würde ich den Aufwand für den µC zunächst zurückstellen und die ersten Messungen z.B. mit einem Multimeter machen ggf. an einem aufzeichnenden z.B. per RS232-Ausgabe an Laptop/PC.
Hi, danke für die Links. Beim "einspielen" von Körperbewegungen für z.B. Filme oder Spiele, wird ja (glaube ich) an verschiedenen Stellen auf einem Anzug iR-LEDs gemacht und dann per Kamera ausgewertet, Abstand gemessen etc. Nur das ist mir ein wenig zu aufwendig, zudem es mir "nur" um den Arm geht. Ich habe mir folgenes überlegt, was ich an Sensoren will/brauche: Ellenbogen neigen Unterarm drehen Handgelenk neigen (hoch-runter) Handgelenk knicken (links-rechts) 4* Finger knicken Daumen knicken Daumen neigen Es gibt zwar noch Kleinigkeiten, die nicht aufgenommen werden, wie z.B. Neigen von den einzelnen Fingern oder knicken der einzelnen Fingerglieder, aber das ist nicht so wichtig für meine zwecke und wird somit, wenn überhaupt, zum Schluss, wenn der Rest funktioniert, dazugebaut. Ziel ist es, die oben genannten Bewegungen (so einfach wie möglich) zu messen und an einen nachgebauten Arm weiter zu geben. Das ist ein Projekt von einem Freund (Bachlor in Präz. Maschinenbau) und mir selbst (Elektroniker). Ich hab schon eine grobe Idee für die Finger (warscheinlich mit Handschuh), aber ich arbeite mich erstmal von oben nach unten (wenn man den Arm nach unten hängen lässt ;) ). Werde mir nochmal genau ortophädische Schienen (für Beine, sind ja ähnlich wie Arme) angucken und mir da vielleicht was abkupfern.
typ schrieb: > Werde mir nochmal genau ortophädische Schienen (für Beine, sind ja > ähnlich wie Arme) angucken und mir da vielleicht was abkupfern. Hallo, wenn ich mir die möglichen Bewegungen meiner eigenen Hand so ansehe, fürchte ich, jedes darum gebaute Gestell wird ungeheuer kompliziert, wenn es keine Bewegung behindern soll. Ich würde daher anders ansetzen: Um die Drehung der Hand um etwa 180 Grad (Daumen nach oben oder unten wie bei den Gladiatoren) zu messen, würde ich einen Lagesensor direkt unterhalb des Ellbogens und einen an der Handfläche befestigen. Mit den entsprechenden 3D-Gleichungen lässt sich die gegenseitige Verdrehung herausrechnen, bei heutiger Technologie dürfte das kein Problem sein. Man müsste bloss Lagesensoren finden, die klein genug sind, um z.B. in einen Handschuh eingebaut zu werden. Gruss Reinhard
typ schrieb: > Hi, danke für die Links. Beim "einspielen" von Körperbewegungen für z.B. > Filme oder Spiele, wird ja (glaube ich) an verschiedenen Stellen auf > einem Anzug iR-LEDs gemacht und dann per Kamera ausgewertet, Abstand > gemessen etc. Nur das ist mir ein wenig zu aufwendig, zudem es mir "nur" > um den Arm geht. die Frage ist es wirklich mehr aufwand ist, dort sind wenigsten die Hardware kosten gut überschaubar. Das teuereste ist die Kamera und dafür sollte es schon eine bessere Webcam tun. Das größte Problem ist dann noch die Software, aber wenn es nicht in echtzeit sein muss sollte es auch hinzubekommen sein. Eventuell kann man auch mehre Kameras nehmen dann sollten sich die berechnungen vereinfachen. man muss sich nur noch etwas überlegen wie man die Messpunkte unterscheiden kann (eventuell verschieden Farben)
Nimm Piezo-Sensoren, biegbar. In Handschuh und Armstrumpf einnähen. Ist eine alte, mittlerweile freie, Erfindung Meinerseits.
Reinhard Kern schrieb: > Um die Drehung der Hand um etwa 180 Grad (Daumen nach oben oder unten > wie bei den Gladiatoren) zu messen, würde ich einen Lagesensor direkt > unterhalb des Ellbogens und einen an der Handfläche befestigen. Mit den > entsprechenden 3D-Gleichungen lässt sich die gegenseitige Verdrehung > herausrechnen, bei heutiger Technologie dürfte das kein Problem sein. > Man müsste bloss Lagesensoren finden, die klein genug sind, um z.B. in > einen Handschuh eingebaut zu werden. Meinst du damit Beschleunigungssensoren? Ich hab mir auch schon überlegt, an den gewissen Stellen die Sensoren zu nehmen und dann kann ich ja gucken, in welche Richtung die Erdbeschleunigung ist. Dann muss natürlich wieder ordentlich gerechnet werden, weshalb das mit einem Poti einfacher gehen würde (gerade den Winkel von z.B. Ober- zu Unterarm). Nur wenns halt überhaupt nicht geht, dann muss ich halt was anderes machen (z.B. Beschl.-Sensor). Ich wollte mir sowieso welche kaufen: http://aevum-mechatronik.de/shop/USER_ARTIKEL_HANDLING_AUFRUF.php?darstellen=1&Kategorie_ID=100&Ziel_ID=887&anzeigen_ab=&sort=&order=&PEPPERSESS=3506e4b2a0fa02c4077199190578a405 Ist klein und günstig. Peter schrieb: > Das teuereste ist die Kamera und dafür > sollte es schon eine bessere Webcam tun. > Das größte Problem ist dann noch die Software, aber wenn es nicht in > echtzeit sein muss sollte es auch hinzubekommen sein. Es stimmt, das da die Kosten warscheinlich günstiger sind, zumal man ansich ein billiges Lang-Arm-Shirt genutzen kann. Nur hab ich keine Ahnung, wie man die Lichter erkennen kann, daraus berechnen, wie welches Glied steht und was ist mit anderen, störenden Lichtquellen/-reflektionen? Zudem sollte es in Echtzeit sein, da ich ja mit dem eigenen Arm einen anderen, rein mechanischen/elektronischen Arm steuern will. Erhardt schrieb: > Nimm Piezo-Sensoren, biegbar. In Handschuh und Armstrumpf einnähen. > Ist eine alte, mittlerweile freie, Erfindung Meinerseits. An sowas hab ich auch schon gedacht, gerade für die Finger, nur wie sehen solche Teile aus und wo bekomme ich die Teile bzw. wie kann ich sie mir bauen. Kannst du von deinen Sensoren ein paar Infos, Datenblätter, Fotos oder so zeigen? Ansich wäre das einfachste, man hätte einen Anzug, der recht eng anliegt und dann an jedem Beweglichen Teil eine Art Gummi ist, dessen Dehnung man Ohmisch messen kann. Aber vielen dank, für die vielen, tollen Tipps
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.