Hallo! Ich möchte ein Go-Kart selbst bauen. Es soll folgende Features haben: -Elektromotor (Ströme ohne "Verletzungsgefahr", vllt. 24V, auf jeden Fall dc) -Hinterradantrieb mit zuschaltbarem Allradantrieb (Per Kupplung oder sowas, mit Sperrdifferential) -ca. 30-40 km/h und ca. 3 kW -Steigung bis zu 30% (hier reichen 15 km/h) -Einzelradaufhängung mit Federung -Geländefähig (schon so um die 25 cm Bodenfreihheit) -Akkulaufzeit ca. 1 Stunde (mit ein wenig Strom für ca. 50 LEDs und Steuerungselektronik) -Bremsenergierückgewinnung per E-Motor -"Zusatzbremse" 4-Rad Scheibenbremse -Lenktrapez -Gas- und Bremssteuerung über Fußpedale -Länge 1,5 bis 2 Meter -Breite maximal 80 cm! (passt sonst nicht in den Aufzug) -Zulassung/TÜV? -Vielleicht Allradantrieb ab 10% Steigung automatisch? Ich weiß, das sind eine Menge Features, aber lieber mehr Infos als zu wenig. Vielen Dank an alle im Voraus Niklas
Wieviel Geld hast du zur Verfügung und wie sehen deine Vorkenntnisse aus?
An der tech. Umsetzung von vielen der Features die du genannt hast, arbeiten ganze Entwicklungsabteilungen von Autoherstellern mit dickem Budget. Das als Hobbyprojekt (ohne dir jetzt die Motivation nehmen zu wollen) ist... sportlich. - gerd
Die wichtigsten Fragen vorweg: Soll das/die Sperrdifferenzial(e) elektrisch oder mechanisch geschalten werden? Wie viele Sperrdifferenziale? ABS? ESR? elektrische Lenkhilfspumpe?
Angehängte Dateien:

Naja, der Rahmenbau ist schon einmal recht günstig, da ich in Peking wohne. Hier fahren nähmlich massenweise Dreiräder mit E-Motor rum und rahmen kann man sich billig schweißen lassen. Diese Dreiräder (Wie Fahrräder, mit 2 hinteren Rädern) transportieren Unmassen an Zeugs (siehe Bild, das ist ungefähr nur die Hälfte vom Maximum, ohne Sch***), Ich glaube, das sind recht gute und günstige Motoren, die man hier fast überall in den Fahrradläden gibt. Ich weiß aber nicht, was für eine Fahrdynamik die haben, mal gucken.
Angehängte Dateien:
-

SCAN0086.JPG
220 KB
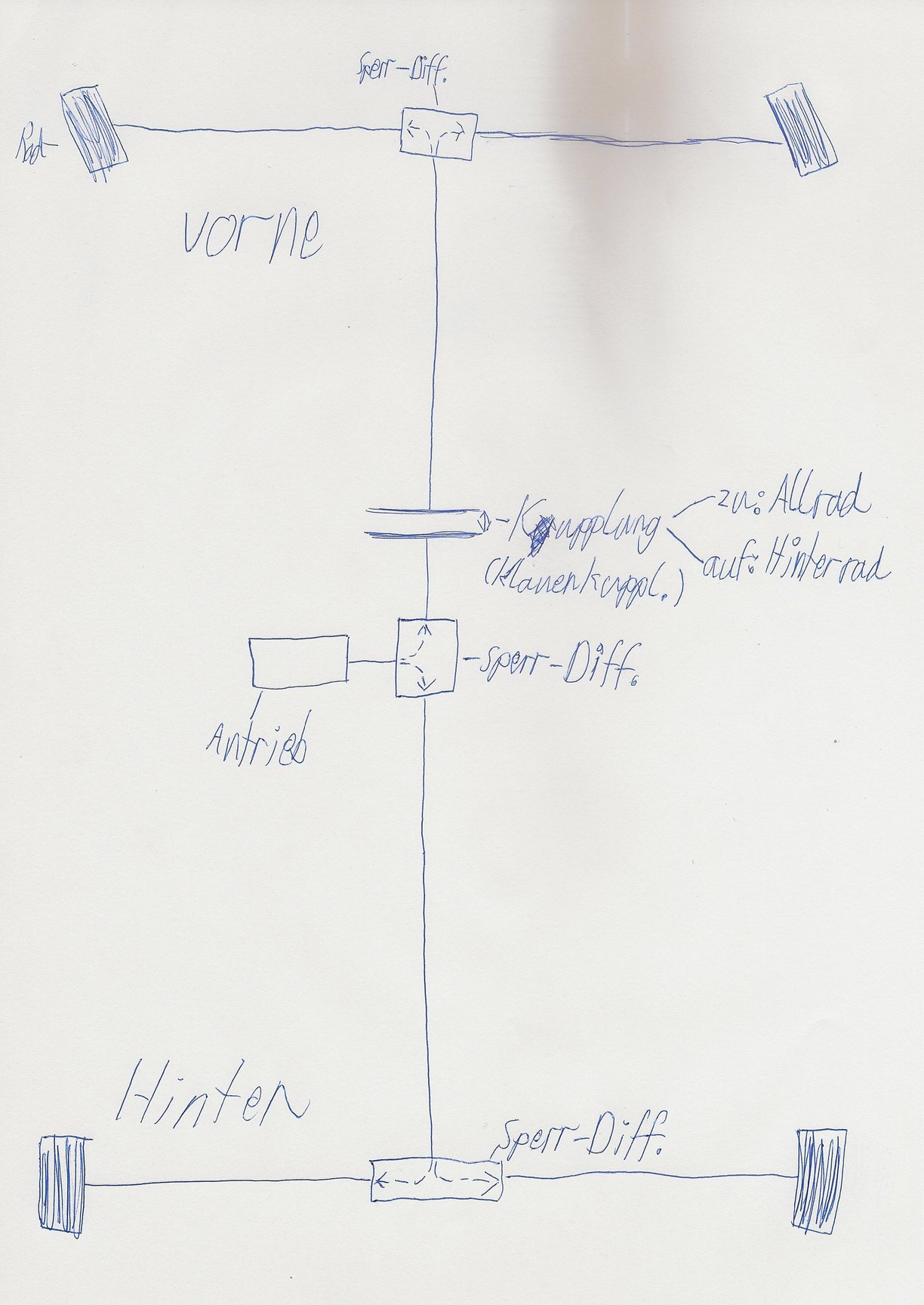
Am besten natürlich elektrisch, wenn es aber auch effizient mechanisch geht, gerne das. 1 vorne (zwischen links/rechts), 1 mitte (vorne/hinten), 1 hinten (links/rechts) siehe scan im Anhang Evtl. abschaltbares "ESP & ABS" (aber nur als Detail, jedenfalls so, dass es hardwaremäßig drauf ausgelegt ist, elektr. Sperrdifferenzial, und softwaremäßig aufgerüstet werden kann) Lenkhilfe eigentlich nicht
Niklas Braun schrieb: > da ich in Peking wohne. Sorry, aber wir verschenken unser KnowHow doch nicht nach China. In 2 Jahren kommt dann eine chinesische Firma und macht mit billigen Allrad E-Karts die deutschen Startups und Hersteller kaputt!
>>Sorry, aber wir verschenken unser KnowHow doch nicht nach China. In 2 >>Jahren kommt dann eine chinesische Firma und macht mit billigen Allrad >>E-Karts die deutschen Startups und Hersteller kaputt! @ Racer Ich möchte mal ganz dezent drauf hinweisen, dass ich weder Chinese bin (sondern Deutscher), noch an einer chinesischen Firma arbeite, sondern Schüler (8. Kl.) bin, und es auch nicht für nötig halte, das KnowHow in ganz China zu verbreiten. Außerdem sind solche behauptungen Quatsch.
Nicht, das daß was ich jetzt sage, irgend wann als billiger Chinaschrott den Europäischen Markt überschwemmt <scnr> Ich würde das Ganze anders angehen. Wenn die Motoren so Preiswert sind, würde ich 2 oder 4 Stück davon verwenden. An jeder Achse oder noch besser an jedem Rad einen Motor. Das erspart die ganzen mechanischen Verluste und das Hin und Her mit Differentialen, Sperrdifferentialen usw. Im Zusammenspiel mit einem Sensor, der die Lenkradstellung überwacht und 4 Drehzahlaufnehmern an den Rädern kann man dann durchdrehende Räder im Gelände erkennen und die Leistung stattdessen auf das gegenüberliegende Rad geben, bis wieder alle Räder Bodenkontakt haben. Drehzahlunterschiede beim Lenken kann man dann durch eine Art "elektronisches Differential" ausgleichen, das über den Lenksensor angepasst wird und die Lenkung noch unterstützt. Frank
Frank B. schrieb: > Ich würde das Ganze anders angehen. > Wenn die Motoren so Preiswert sind, würde ich 2 oder 4 Stück davon > verwenden. An jeder Achse oder noch besser an jedem Rad einen Motor. Das > erspart die ganzen mechanischen Verluste und das Hin und Her mit > Differentialen, Sperrdifferentialen usw. wäre auch meine idee mit einzelradanrieb. das ganze setzt aber tiefgehende kentnisse in regeluungstheorie voraus (mindestens. discrete state space control), mal eben reinarbeiten ist da nicht. ein einfacher controller reicht da auch nicht mehr.. dafür kann man damit dann jeden scheiß wie esp etc. realisieren. btw. nimm wenn keine gleichstrommotoren sondern ASMs mit umrichtern..
Frank B. schrieb: > Nicht, das daß was ich jetzt sage, irgend wann als billiger Chinaschrott > den Europäischen Markt überschwemmt > <scnr> > > > Ich würde das Ganze anders angehen. > Wenn die Motoren so Preiswert sind, würde ich 2 oder 4 Stück davon > verwenden. An jeder Achse oder noch besser an jedem Rad einen Motor. Das > erspart die ganzen mechanischen Verluste und das Hin und Her mit > Differentialen, Sperrdifferentialen usw. > > Im Zusammenspiel mit einem Sensor, der die Lenkradstellung überwacht und > 4 Drehzahlaufnehmern an den Rädern kann man dann durchdrehende Räder im > Gelände erkennen und die Leistung stattdessen auf das gegenüberliegende > Rad geben, bis wieder alle Räder Bodenkontakt haben. > Drehzahlunterschiede beim Lenken kann man dann durch eine Art > "elektronisches Differential" ausgleichen, das über den Lenksensor > angepasst wird und die Lenkung noch unterstützt. > > Frank Hey! Hammergeniale Idee! Die Frage ist nur, ob die Radaufhängung das mitmacht, aber ich denke, das kann man lösen. Dann wären auch diverse Platzprobleme gelöst und man würde die nicht ganz billigen Teile, wie Differenzialgetriebe und Kupplung weglassen können. Allerdings müsste man dann die Motoren wasserfest einpacken, denn wenn man durch Pfützen, Schnee oder Gras fährt (ja, das gibt es hier wirklich!!!) könnte das kritisch werden. Also Frank, Vielen Dank für diese Idee! Niklas
Kann man dann die Räder so lagern, dass die Motoren direkt an den Rädern sitzen oder die Räder über eine Welle angetrieben werden und der Motor weiter "innen" sitzt? Auch bei großer Beschleunigungs/Bremskraft?
Wenn es ganz billig sein soll kannst du auch bei normalen DC Motoren bleiben und diese alle an einen Regler hängen. Die Drehzahlunterschiede gleichen sich in großen Bereichen von selbst aus und eine pseudo Sperrdiff ist auch dabei (ein Motor dreht höher => Gegenspannung steigt und der Strom sucht sich einen Weg durch die anderen Motoren.) Diese Lösung ist nicht die feine Klinge, das ist mir bewusst, aber ein gangbarer Weg (schau dir Karts mit zwei Motoren an, die machen das im Bastlerbereich genauso). Ein gutgemeinter Tipp ist noch die Lenkgeometrie nicht von Benzinern zu übernehmen, da diese leichter sind und durch die Starrachse gezwungen sind ein Antriebsrad vom Boden zu heben.
Moin, schau dir mal das hier an: http://hobbyking.com/hobbyking/forum/forum_posts.asp?TID=12064 Das ist jetzt nicht exakt das, was Du dir vorstellst, aber vielleicht kannst Du ja vom Antrieb Ideen übernehmen. Wenn der Thread für Dich gesperrt ist, melde Dich dort an. :-) Johannes
Angehängte Dateien:
-

Lenktrapez_Prinzip.jpg
2,7 KB
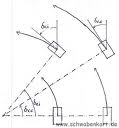
zoggl schrieb: > Ein gutgemeinter Tipp ist noch die Lenkgeometrie nicht von Benzinern zu > übernehmen, da diese leichter sind und durch die Starrachse gezwungen > sind ein Antriebsrad vom Boden zu heben. Das Go-Kart das ich basteln will, hat ja keine Starrachse, sondern ein "elektronisches Differential". Mit Lenktrapez meine ich lediglich, dass das innere lenkende Rad etwas stärker als das Äußere einschlägt um einen synchronen Mittelpunkt der Kurve zu erzeugen. Das verhindert, dass ein Rad in der Kurve "radiert". Ich habe in Google eine schöne Zeichnung gefunden, der Download ist hier aber gesperrt (Scheiß China-Regierung). Das ist der Link: http://www.die-kart-macher.de/Technik/LenkGeo/LenkGeoAckermann.jpg
{kind=link}
Niklas Braun schrieb: > Kann man dann die Räder so lagern, dass die Motoren direkt an den Rädern > sitzen oder die Räder über eine Welle angetrieben werden und der Motor > weiter "innen" sitzt? > Auch bei großer Beschleunigungs/Bremskraft? Ich denke das ganze ist eh sinnvoller die Motoren weiter nach innen zu setzen und dann auch vor Umwelteinflüssen zu schützen. Außerdem hast da so auch nicht das Problem der höheren ungefederten Masse wenn du etwas ala Nabenmotoren nutzen würdest.
Die Motoren in die Räder einzubauen, war auch meine erste Idee. Auf jeden Fall solltest du die Spezifikationen genau festlegen, ein Pflichtenheft ist auch bei Hobbyprojekten nützlich. Und dann solltest du ein bisschen rechnen. 1.) Um mit 3kW bei 30% Steigung noch 15km/h zu schaffen, muss das Gesamtgewicht unter Vernachlässigung der Reibung unter 240kg liegen. Wegen der Reibung real wohl unter 200kg. Ein LiPo-Akku hat etwa 150Wh/kg. Wegen der Lebensdauer sollte man nur die Hälfte davon nutzen, damit wiegt der Akku mindestens 40kg (über Preise reden wir ja nicht ;-) ) Fahrer noch einmal 80kg, Motoren 20kg(?). Bleibt also für den gesamten Rest (Gestell, Sitz, Räder, Federung etc.) nur noch 60kg über. Das erscheint mir ziemlich wenig. 2.) Ein Motor mit einer Nennleistung von XXX Watt gibt diese Leistung nicht über die gesamte Drehzahl ab. Gerade an Steigungen, wo die Leistung gebraucht wird, ist die Drehzahl geringer - und damit auch die Leistung. Das musst du mit berechnen und dir die Drehmomentkurven der Motoren besorgen. Grob kannst du davon ausgehen, dass die Motoren in etwa eine doppelt so große Nennleistung haben müssen, wie du an der Steigung brauchst, also 1500W/Stück (über Preise reden wir ja nicht ;-) )
Moin zusammen, Die Differenziale würde ich auch weglassen. mit sensored Brushless Motoren von Turnigy, guckst du hier http://www.youtube.com/watch?v=hjNQuQgkvVA&feature=related Hast du eine besseren Wirkungsgrad und die Regler kannst du nach ner APP Note von Atmel mit nem ATmega48 machen, Sinusodial Drive of brushless DC. Dann machste in dem Programm den Drehzahlregler auf, und regelst nur den Strom Aka Drehmoment, schon haste n elektronisches Differenzial, bzw permaneten Allrad. da brauchst du dich gar nicht groß mit Regelungstechnik auskennen, da finde ich den rein mechanischen Aufbau also das Chassis schwerer herzustellen und auch teuer. Und wenn du elektrisch komplett unbefleckt bist dann nimmste Modellbauregler die sollten es auch tun. Aber keine für Sensorless nehmen, das könnte sonst Probleme beim anfahren geben. Weil die Sensorless eine gewisse Drehzahl brauchen um richtig arbeiten zukönnen. MfG Tec
Frederik Krämer schrieb: > Niklas Braun schrieb: >> Kann man dann die Räder so lagern, dass die Motoren direkt an den Rädern >> sitzen oder die Räder über eine Welle angetrieben werden und der Motor >> weiter "innen" sitzt? >> Auch bei großer Beschleunigungs/Bremskraft? > > Ich denke das ganze ist eh sinnvoller die Motoren weiter nach innen zu > setzen und dann auch vor Umwelteinflüssen zu schützen. Außerdem hast da > so auch nicht das Problem der höheren ungefederten Masse wenn du etwas > ala Nabenmotoren nutzen würdest. Ja, das stimmt. Man muss dann aber noch eine Achse mit Kreuzgelenk legen, damit sie federbar bleibt.
Was ich ganz vergessen hatte: Kann man wenn Allrad aktiviert ist z.B. kleine Stufen mit virtuellem Differential ausgleichen? Wenn man eine Stufe fährt, muss sich ja zuerst das vordere Rad, dann das hintere etwas "schneller" drehen.
Niklas Braun schrieb: > Frederik Krämer schrieb: >> Niklas Braun schrieb: >>> Kann man dann die Räder so lagern, dass die Motoren direkt an den Rädern >>> sitzen oder die Räder über eine Welle angetrieben werden und der Motor >>> weiter "innen" sitzt? >>> Auch bei großer Beschleunigungs/Bremskraft? >> >> Ich denke das ganze ist eh sinnvoller die Motoren weiter nach innen zu >> setzen und dann auch vor Umwelteinflüssen zu schützen. Außerdem hast da >> so auch nicht das Problem der höheren ungefederten Masse wenn du etwas >> ala Nabenmotoren nutzen würdest. > > Ja, das stimmt. Man muss dann aber noch eine Achse mit Kreuzgelenk > legen, damit sie federbar bleibt. Joa das stimmt auch wieder, die Frage ist dann halt was einfacher umsetzbar ist. Ich weiss ja nicht wie gut da die Beschaffbarkeit/Baubarkeit bei dir um die Ecke ist für Kreuzgelenke. Bzw wie einfach es ist den Motor zu schützen.
Zur Drehzahlmessung habe ich schon solche Mikrochips gefunden, die Magnetfelder erzeugen und messen können. Wenn man dann an jedem Rad z.B. vier Magneten anbringt und an dem Lager den Chip, könnte man die Veränderungen des Feldes messen und zählen und daraus die Drehzahl berechnen. zoggl schrieb: > Wenn es ganz billig sein soll kannst du auch bei normalen DC Motoren > bleiben und diese alle an einen Regler hängen. Die Drehzahlunterschiede > gleichen sich in großen Bereichen von selbst aus und eine pseudo > Sperrdiff ist auch dabei (ein Motor dreht höher => Gegenspannung steigt > und der Strom sucht sich einen Weg durch die anderen Motoren.) Das ist auch eine gute Idee. Wenn ich das richtig verstehe, schaltet man die Motoren elektrisch parallel, und wenn in einem Motor weniger Strom gezogen wird, verteilt er sich "von selbst" auf die Anderen.
Hi, für die Great Firewall hier zwei Tipps: http : // ontxt . com/1/ http : // vtunnel . com/ Jeweils die Leerzeichen rausnehmen. 88
Frederik Krämer schrieb: > Ich weiss ja nicht wie gut da die Beschaffbarkeit/Baubarkeit bei dir um > die Ecke ist für Kreuzgelenke. Bzw wie einfach es ist den Motor zu > schützen. Kreuzgelenke aus Deutschland Motor schützen: Box drum, fertig
Pekinese schrieb: > für die Great Firewall hier zwei Tipps: > http : // ontxt . com/1/ > http : // vtunnel . com/ > Jeweils die Leerzeichen rausnehmen. Ich kenne mittlerweile 20 Proxys mit dem gleichen Fehler: Die Video-Embedding-Links werden modifiziert.
Noch ne Frage: wie sieht es mit der Zulassung aus?
Mach dir vor allen anderen technischen Details erst einmal Gedanken über die Stromversorgung. Dann wirst du sehr schnell merken, daß sich das Projekt mit den geforderten Eigenschaften kaum realisieren läßt. 3 kW über eine Stunde sind 3000 Wh nötige Energie. Eine gängige Li-Einzelzelle mit 2000 mAh hat etwa 7,5 Wh Energie, du brauchst also 400 Stück davon, um 1 Stunde lang mit 3 kW fahren zu können. Theoretisch jedenfalls, denn weder der Wirkungsgrad noch die minimale Restladung von ca. 20% (damit die Akkus nicht sofort kaputt gehen) sind hierbei berücksichtigt. Um mal einen ungefähren Vergleich zu geben: Ich kann mein Pedelec mit 0,2 kW Leistung und zwei 12V/22Ah Akkus auch etwa eine Stunde fahren, bis die Energie alle ist. Die Akkus (Bleigel) wiegen alleine schon ca. 16 kg.
Dann muss er die Batterien eben durch einen Anhänger mit einem Stromaggregat darauf ersetzen.
Es ist möglich, aber diese Funktionen sind ehr fraglich: > -Einzelradaufhängung mit Federung > -Bremsenergierückgewinnung per E-Motor Das erste ist einfach nur komplex und kann etwas teuer werden, bei zweiten allerdings ist es kompliziert und auf jeden Fall teuer. Den Motor kannst du zur Rückgewinnung nehmen, also wenn der auch als "Dynamo" geeignet ist, jedoch arbeiten echte Firmen immer noch an einer Lösung der Nutzung der Energie, wie die eingespeist werden soll, bez. gespeichert (Kondensator) ist viel Entwicklungsaufwand. Auch das mit den Akkus ist ehr komplex, man bedenke, der am besten geeignete Motor ist ein Asynchroner Drehstrommotor, der wäre jetzt nicht so teuer, aber du benötigst erst mal einen Wechselrichter / (Drehrichter? heißt das so?). Dafür brauchst du ca. 500V Spannung, Wäre ja jetzt auch nicht so komplex (teuer und man muss Wissen haben aber dann ist es realisierbar). Zum Akku: Da kommen wohl keine Bleigel in Frage, Haben zwar eine hohe Leistung aber sind einfach zu schwer (da bräuchtest du locker über 15 Stück von). LiPos sind zwar besser aber auch nicht sonderbar gut geeignet, wegen der Selbstentladung und der geringeren Leistung. Aber besten aus dem heutigen Stand der Technik wären LiIon besser oder Lithium-Titanat (die gibt es aber nur selten). (In Zukunft sind wohl Lithium-Luft die besten siehe Wikipedia). PS: Hier im Forum gab es mal einen "sinnlosen" Thread zu Elektromotoren / Bez. E-Kart, ist zwar nichts daraus geworden und viel herum getrollt, aber am Ende des Threads gibt es eine ganz gute Akku Berechnung und einige Tipps.
Habs gefunden, ab hier abwärts wird es interessanter: Beitrag "Re: elektromotor?" PS: Es gibt auch schon E-Karts: http://www.elektrofunkarts.de/
Ferdinand T. schrieb: > Den Motor kannst du zur Rückgewinnung nehmen, also wenn der auch als > "Dynamo" geeignet ist, jedoch arbeiten echte Firmen immer noch an einer > Lösung der Nutzung der Energie, wie die eingespeist werden soll, bez. > gespeichert (Kondensator) ist viel Entwicklungsaufwand. Diese Dinger gibt es schon seit längerem fertig zu kaufen. Energierückspeisung im Bremsbetrieb wird nicht nur im Bahnbereich angewendet sondern selbst in "einfachen" Elektroautos. Und ob die Dinger in ein Wechselstromnetz mit 15KV und 16 2/3Hz speisen oder in einen Akku ist ihnen eigentlich egal, wenn sie passend dafür ausgelegt sind. > Wechselrichter / > (Drehrichter? heißt das so?) Frequenzumrichter (oder auch mal nicht so technisch korrekt (der Begriff stammt von den etwas begriffstutzigen Amis) Inverter) mit 4 Quadrantenbetrieb heißen die Dinger. Ferdinand T. schrieb: > Dafür brauchst du ca. 500V Spannung Bei Asynchronmotoren im Dreieckbetrieb sogar noch mehr (565V). Frank
Danke für die Verbesserung. Zum ersten noch was: Aber hier ist ja das Problem das bei der Rückgewinnung eine viel höhere Spannung erreicht wird, die eingespeist werden muss, oder sehe ich das falsch. Wenn ich es richtig sehe, muss man trotzdem erst mal eine Möglichkeit finden das passend für den Akku zu machen. Aber sonst nochmal Danke für den Hinweis, denn das da die Technik schon so weit ist wusste ich noch nicht.
Hallo Niklas, es gibt das CityEL welches deinen Daten sehr nahe kommt: ca. 3kW, geht auch mit 48V bei 150A, 50 bis 100km Reichweite, von 36V->45km/h bis 48V->70km/h, Umbauten auf Rekuperation, TÜV als Moped mit 45km/h oder als Motorrad bis 70km/h) Ich denke Du kannst aus diesem Fahrzeug sehr sehr viel Infos herausnehmen und verstehen was geht und was nicht. Das CityEL wird noch heute in Deutschland gebaut, jedoch wurden die ersten vor 20 Jahren gebaut. Die verwendete E-Technik ist durchgehend bekannt, eine Community für Wartung und Modifikationen ist immer dran. So sieht das von meinem Sohn aus: http://www.inexess.com/daniel/lib/exe/detail.php?id=start&media=cityelnachtklein.jpg Mehr Infos findest auf: www.elweb.de -> dann oben auf elwiki klicken Beste Grüße, Lukas
{kind=link}
> > Das Go-Kart das ich basteln will, hat ja keine Starrachse, sondern ein > "elektronisches Differential". Mit Lenktrapez meine ich lediglich, dass > das innere lenkende Rad etwas stärker als das Äußere einschlägt um einen > synchronen Mittelpunkt der Kurve zu erzeugen. Das verhindert, dass ein > Rad in der Kurve "radiert". Hallo Niklas, das Du vor Ort sitzt, solltest Du auch die Quellen vor Ort anzapfen. Du haettest eigentlich folgendes schon leicht herausfinden koennen: Die an den Elektrobikes in CHina eingesetzten Motoren sind Nabenmotoren Die Leistung ist bei den kleinen 200W, standard 250W, Du bekommst einfach 400W Motoren und etwas schwieriger (nicht in Shanghai, aber z.B. in Suzhou) 800W-1500W Motoren. Ein 300W-Motor kostet ohne Rad 30-40 EUR, incl. Steuerung. Beim Einsatz von Nabenmotoren brauchst Du kein Sperrdifferential. Nich mal ein Diferential. Und fuer Allradantrieb schaltest Du einfach die anderen Motoren ein! Es handelt sich ausnahmslos um Permanetnmagnet-DC-Motore OHNE Rueckspeisung. Die Akkus sind bei den einfacheren E-Bikes, die man nachgeworfen bekommt, Blei-Gel-Akkus. Bei den hoeherwertigen - die allerdings teurer sind und in Taiwan hergestellt werden - kommen LiIon zum Einsatz. LiPo habe ic noch nicht gesehen. Fuer einen Antrieb mit 1-2kW und LiIon Batterie, kannst Du fuer einen Satz ANtriebsmotoren (4 Stck) mit entsprechender Batterie in China um die 1000 EUR rechnen (wobei die Batterie das teurere ist!) Geh doch mal in einen E-Bike-Laden (natuerlich nicht zu Carrefour) und unterhalt´Dich ein wenig. Gruss aus Shanghai Michael
Ferdinand T. schrieb: > PS: Hier im Forum gab es mal einen "sinnlosen" Thread zu Elektromotoren > / Bez. E-Kart, ist zwar nichts daraus geworden und viel herum getrollt, > aber am Ende des Threads gibt es eine ganz gute Akku Berechnung und > einige Tipps. Ja, Das Forum habe ich auch schon gelesen.
Naja, Nabenmotoren wären für mich eher die Notlösung. Irgendwie muss man ja die Kabel verlegen und die gefederte Masse oder wie das heißt :-) ist dann größer.
Ein Projekt mit solchen Forderungen ist kaum zu bezahlen geschweige dann zu verkaufen. Ein "richtiger" Allradantrieb hat 3 Differenziale. Vorne und hinten ein Diff und in der Mitte ein Differenzial welches das Drehmement nach vorne und hinten verteilt. So was in klein ist auch nicht viel weniger teuer as in gross. Die Reibungsverluste bei 3 Differenzialen ist nicht unbeträchtlich was gerade beim Elektroantrieb nicht gerade positiv ist. Ein Allradauto braucht schnell mal 1L mehr Treibstoff auf 100km als mit Zweitradantrieb. Elektrisch nicht gerade wenig Energie. Ein ESP-Abzustimmen dürfte so fast eine Lebensaufgabe sein.Wenn hier nur der kleiste Fehler auftritt hat man kein ESP sondern ein ASP (Anti- Stabilisierungsprogramm) was vielleicht sogar tödlich enden kann. Also vergiss ESP,ABS oder ähnliches. Von TÜV-Zulassung wollen wir schon gar nicht sprechen ausser du hast ein Millionen-Budget. Tzn Allradanrieb: Entweder an jedes Rad ein Elektromotor oder vorne und hinten ein Diff mit je einem Motor. Braucht 4 Motorn und 4 teure Regler. Besser vergiss den ganzen Krimskrams wie ESP und Allrad. Bau Heckantrieb mit hinten 2 Motoren. So kannst du ein elektronische Speerdiff simulieren und wenn nötig eine Antischlupfreglung. Natürlich mit genügend Gewicht auf der Hinterache. So kommt man fast überall rauf.
von der Beschreibung her hört sich das nach Quad an. Vielleicht 'einfach' ein fertiges (gebrauchtes) Quad auf E-Antrieb umrüsten? Ein googeln nach 'quad elektro' liefert auch sofort Treffer, gibbet auch schon fertig zu kaufen.
Ich finde das Thema sehr interessant. Die Argumente, dass bei den Autoherstellern ganze Entwicklungsabteilungen sitzen hat seinen Hintergrund im Bezuschussungssystem für technische Entwicklungen. Im Grunde haben die Modellbauer das alles schon gebaut. Im Hubschrauberbereich werden schon ganz nette Leisungen verbaut. Plettenberg hat einen relativ kleinen Motor mit 11 KW für Flugmodelle. Das Nutzbare Drehzahlband paßt zwar nicht aber es gibt bestimmt was passendes. Wenn man das ganze auf einem Schaltkart Chassis aufbaut, braucht man nur noch die Hinterachse in der Mitte trennen. Man sollte an jeder Achse zwei Motoren mit einer Elektrischen oder Visko Kupplung zusammenschalten. Antrieb hinten auf die mittig getrennte Achse und vorne über Kleine Achswellen. Die Visko Kupplungen würden bei durchdrehenden Kurveninneren Rädern die Antriebsleistung mit auf das kuvenäussere Rad bringen. Intelligenter ist natürlich die Lösung mit einer Elektrisch geschalteten Kupplung um unnötigen Schlupf an den Rädern zu vermeiden. Wichtig wäre auch die Bremsenergie Rückgewinnung gesteuert über das Bremspedal. Bevor die Hydraulischen Bremsen greifen sollte über den toten Bereich des Pedals die Bremswirkung der Motoren bis zur vollen Leistung genutzt werden. Wenn man sowas zum Laufen bekäme wäre es bestimmt möglich Interessenten für eine E-Kart rennserie zu finden. Man müßte halt in der Lage sein ein 30 KW schaltkart zu verblasen. Damit könnte man Furore machen.
Ralf Wolbers schrieb: > Man müßte halt in der Lage sein ein > 30 KW schaltkart zu verblasen. Damit könnte man Furore machen. Für eine paar Minuten kein Problem, aber dann ist race over. Die arg begrenzte Fahrzeit macht E-Karts für Rennen untauglich. Rimo baut bereits welche in Serie: http://adacemobility.wordpress.com/2011/09/30/stumme-renner/ Die Vorteile sind kein Lärm, keine Abgase und damit auch weniger Streß mit dem Amt. Das wars dann auch schon. Demgegenüber steht der horrende Anschaffungspreis, für den man drei gute Benzinkarts kaufen kann, die ungenügende Fahrzeit, ein hohes Eigengewicht und, was man bei einem E-Kart eigentlich nicht erwartet, schlechtes Durchzugsvermögen. Laut diversen Feedbacks müssen die Teile immer schön "bei Laune" gehalten werden und im Rennbetrieb ist nach reichlich 40 Runden der Saft alle. Für gewöhnlichen Leihkartbetrieb mit Gelegenheitsfahrern mag es eine Alternative sein, aber gestandene Kartfahrer werden keinen Spaß dran finden. So etwas wie mehrstündige oder gar 24h-Rennen kann man gleich ganz vergessen. Die Mär von den immer gleichen Karts dank E-Antrieb halte ich auch für ein Gerücht, da sich mit der Zeit erstens Abweichungen aufgrund unterschiedlich genutzter Akkus ergeben und zweitens das Fahrverhalten erheblich durch mechanische Gegebenheiten des Fahrwerks beeinflußt wird, die sich ebenfalls durch unterschiedliche Beanspruchung (Einschläge etc.) verändern.
Ralf Wolbers schrieb: > Ich finde das Thema sehr interessant. Die Argumente, dass bei den > Autoherstellern ganze Entwicklungsabteilungen sitzen hat seinen > Hintergrund im Bezuschussungssystem für technische Entwicklungen. Im > Grunde haben die Modellbauer das alles schon gebaut. Im > Hubschrauberbereich werden schon ganz nette Leisungen verbaut. Klar die 1000ende Ings sitzen in den Entwicklungsabteilungen nur rum und drehen Däumchen für die Quote. Ein guter Modellbauer ersetzt mindestens 50 Ings. Junge wie heisst das Zeugs das du genommen hast, das muss super sein :-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.