{kind=link}
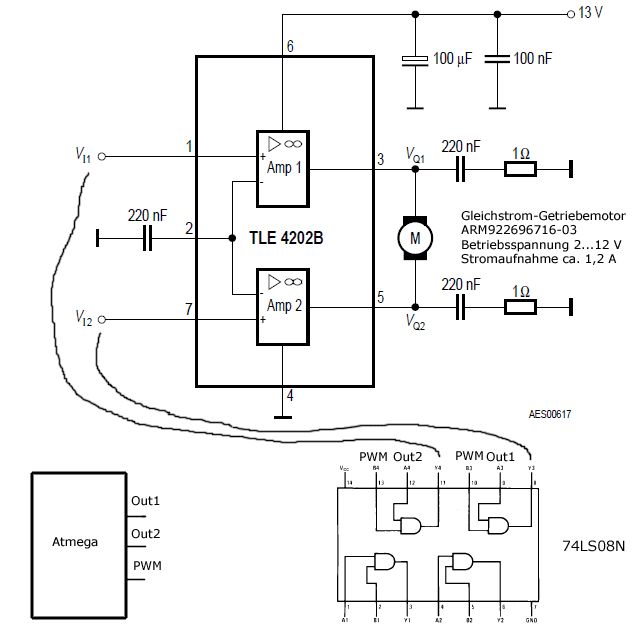
Hallo zusammen, ich habe den Aufbau wie im Bild vorgenommen. Der TLE 4202 B ist eine einfache H-Brücke mit 2 Eingängen. Funktionstabelle: In1 In2 Out1 Out2 0 0 0 0 1 0 1 0 0 1 0 1 1 1 1 1 Das klappt auch soweit. Ich kann den Motor so mit 2 digitalen Ausgängen vom Mikrocontroller aus in beide Richtungen bewegen. Damit ich nun keine 4 PWM Kanäle brauche, um den Motor in der Geschwindigkeit zu regeln, habe ich mir einen 74LS08 (4 x 2 Input AND Gatter) davor gehauen. So erreicht man eine Ansteuerung wie z.B. beim L298. Nun zum Problem: Ich habe jetzt schon 2 PWM Geschwindigkeiten ausprobiert 7kHz und 32 kHz. Aber der Motor piepst nur. Nur wenn ich den PWM Kanal voll aufdrehe, bewegt sich der Motor. Der Motortreiber (TLE 4202) wird übrigens ziemlich warm mit PWM. Wenn ich die Ausgänge vom Motortreiber messe ist alles OK. Bei halber PWM kommen auch nur 6 V am Ausgang raus etc. Netzteil = 12 V, 2 A Motor = Gleichstrom-Getriebemotor ARM922696716-03, 2-12V, 1.2 A TLE 4202 = Drives motors up to 2 A, Integrated free-wheeling diodes 2.5 A Datenblatt: http://www.datasheetcatalog.org/datasheet/infineon/1-tle4202b.pdf Woran könnte es liegen? Danke
Angehängte Dateien:
-

beschaltung.gif
22 KB
2A könnten zu wenig sein für den Anlauf des Motors? PWM-Frequenz evtl. zu hoch? Wie hast du die Gatter verschaltet?
ptc schrieb: > 2A könnten zu wenig sein für den Anlauf des Motors? Meinst du den Motortreiber ? Aber ohne PWM funktioniert es ja.. Ich hab die PWM mit 3.9 kHz und 31.5 kHz getestet. Beides mal nur piepen. Der Motor ist ein Schiebedachmotor mit Schneckengetriebe. Das Gatter ist wie im Bild verschaltet. Ansonsten 5 V vom 7805.
Red Reggae schrieb: > und 31.5 kHz getestet Wenn du das Piepen hörst,kann etwas mit der f nicht stimmen. oder du hast Superohren. Würde die F wesentlich niedriger machen,vielleicht hat dein Motor ein sehr hohes L
Die 220nF sind evtl zu niederohmig bei den Frequenzen? Bei hohem Duty (PWM fast ganz aufgedreht) ist schon fast DC
Juppi J. schrieb: > Wenn du das Piepen hörst,kann etwas mit der f nicht stimmen. Das Piepen kommt vom Motor. Er ruckelt ein wenig rum dreht sich aber nicht. Erst ab einer PWM von 252 (8 bit PWM..also fast auf Anschlag) dreht er sich. Ich habe die PWM mit VMLab simuliert. Bin mir sehr sicher, dass die Frequenz stimmt. Mike schrieb: > Die 220nF sind evtl zu niederohmig bei den Frequenzen? Das könnte sein. Ich habe die Schaltung aus dem Datenblatt. Was für Kondensatoren / Widerstände könnte ich denn nehmen? Bin leider nicht so fit was analoge Schaltungen angeht.. Danke redreggae
@ Red Reggae (redreggae) >Das Piepen kommt vom Motor. Er ruckelt ein wenig rum dreht sich aber >nicht. Erst ab einer PWM von 252 (8 bit PWM..also fast auf Anschlag) >dreht er sich. Die 220nF + 1 Ohm sind vollkommen fehl am Platz, die schliessen dir deine PWM kurz! Motoren mit dieser Entstörung kann man nicht mit PWM betreiben. MFG Falk
Falk Brunner schrieb: > Die 220nF + 1 Ohm sind vollkommen fehl am Platz Was kann ich denn nehmen? Wie kann ich die richtigen Werte ermitteln? Gruß redreggae
Probier mal eine PWM-Frequenz von 200 Hz - also sehr niedrig. Nicht alle Motoren funktionieren mit hohen Frequenzen.
> Motor = Gleichstrom-Getriebemotor ARM922696716-03, 2-12V, 1.2 A
Und der Hersteller gibt an, dass der Motor mit PWM auch betrieben werden
kann?
Im letzten Jahr war das schon mal ein Thema, ...Pollin-Getriebemotor
Red Reggae schrieb: > Ich habe die PWM mit VMLab simuliert. Bin mir sehr sicher, dass die > > Frequenz stimmt. 32,5 KHz kannst du nicht hören,da haben Hunde schon Schwierigkeiten. Hast du schon mit niedriger F getestet? MfG
Statt zu vermuten sollte man mal messen. Welchen Strom nimmt der Motor bei Gleichstrom auf, und welchen Strom mit der PWM. Also 0,1 - 0,2 Ohm Vorwiderstand und das Oszi dran, dann siehst du was passiert. Ansätze gabs genug: Frequenz ist viel zu hoch für die Entstörung. Evt. ist die Induktivität des Motors zu hoch für die PWM-Frequenz. Also mess mal.
Noch vergessen: Dir ist schon klar, daß ein Gleichstrommotor im Anlaufmoment, oder wenn das Dach in den Anschlag gefahren wird oder klemmt locker bis zu dem 10fachen des Nennstroms ziehen kann? Also Blockierstrom bei der Dimensionierung berücksichtigen.
Hat er denn die Elektronik, die im Flanschgehäuse untergebracht ist, ausgebaut? Motor-Elektronik mit PWM-Elektronik zu betreiben geht nicht so leicht...
Angelsachse schrieb: > Hat er denn die Elektronik, die im Flanschgehäuse untergebracht ist, > ausgebaut? Klar, das war das erste, was ich gemacht habe.. Ich hab die PWM gerade mit 488 HZ getestet..und siehe da der Motor dreht sich. Er bewegt sich jetzt ab 50% PWM. Ich muss wohl das Board ein wenig umdesignen. Was schlagt ihr für Kondensatoren/ Widerstände vor? 47nf oder 100 nf statt 220nf? Und Widerstand? U.R. Schmitt schrieb: > Dir ist schon klar, daß ein Gleichstrommotor im Anlaufmoment, oder wenn > das Dach in den Anschlag gefahren wird oder klemmt locker bis zu dem > 10fachen des Nennstroms ziehen kann? Der Motor zieht laut Datenblatt 1.2 A. Der Motortreiber kann 2A, die Freilaufdioden 2.5A. Wird also sehr knapp. Ich hab 2 von diesen Motoren http://www.pollin.de/shop/dt/OTA2OTg2OTk-/Motoren/DC_Getriebemotoren/Gleichstrom_Getriebemotor_ARM922696716_03.html. Das ganze soll ein ca. 4 kilo schwerer laptop roboter werden. Wenn das mit dem Motorboard nicht klappt, dann muss ich wohl mal was mit Mosfets probieren. Danke redreggae
Das Problem mit dem Pipsen hatte ich auch... meine Lösung : Pulldowns an die Eingänge (22k) und Piepsen ist bei mir weg. Hoffe das löst das Problem grüße
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.