Hallo,
in meiner bisherigen "Programmierlaufbahn" bin ich mit delay(ms) immer
gut
ausgekommen, allerdings suche ich momentan nach einer
delay(nanosekunden)- Funktion.
Reicht es, wenn ich ich bei
1
uint16_tmax=262.14/F_CPU*1000000;
einfach hinten eine Null mehr hinzufüge?.... und ist das auch bei 8bit
Mikrocontrollern möglich?
Danke im Voraus
Nein, tut es nicht.
Rechne dir aus, wieviele Takte deine Zeit lang ist (das werden bei ns
nicht allzu viele sein) und bau enstprechende Pausen.
Gruß
Lasse
Nein.
Du kannst einen Timer verwenden, aber bis auf den unteren
Nansosekundenbereicha aufzuloesen ist mit einem AVR nicht moeglich. Wie
auch, eine einzige Taktperiode ist bei 20MHz Systemtakt 50ns lang.
Damien schrieb:> Geht das auch so?
Wenn du die Zeit die, die while-Schleife benötigt mit einrechnest
(ASM-Listing ansehen und Takte zählen) könnte dies durchaus
funktionieren. Wenn du nicht unbedingt sehr lange Verzögerungen
brauchst, dann tut es auch ein unsigned char.
Welchen Compiler verwendest du?
Michael G. schrieb:> Wie> auch, eine einzige Taktperiode ist bei 20MHz Systemtakt 50ns lang.
Stimmt, aber manche AVRs kommen mit einer PLL so weit ich weiß auf bis
zu 64MHz Timertakt.
Damien schrieb:> ausgekommen, allerdings suche ich momentan nach einer> delay(nanosekunden)- Funktion.
Bist du sicher?
Ein Delay im Nanosekundenbereich ist auf AVRs nicht sinnvoll...
Ich empfehle Dir ebenfalls, das ASM-Listing anzuschauen und Takte zu
zählen.
Meine Empfehlung:
ein Macro, keine Subroutine (deren Aufruf schon etliche Zyklen bruacht).
#define dly(times) {do while(--times);}
habe ich jetzt nicht ausprobiert, aufpassen, dass der Optimierer noch
etwas davon übrig lässt, evtl.
#define dly(times) {do asm(nop);while(--times);}
Die while(--times) abfrage ist sehr zeiteffektiv, da sie in
dec times
bne
übersetzt wird (anstelle eines Vergleiches wird das Zero-Flag
verwendet).
Oder einfach an der Stelle im Code einige asm(nop); einfügen.
Damien schrieb:> allerdings suche ich momentan nach einer delay(nanosekunden)- Funktion.
Sag doch einfach mal, warum und wofür du so etwas brauchst...
Zum Hintergrund: wenn du das Datenblatt eines uC mal gelesen hast (das
ist eine interessante Lektüre, besonders für jemanden, der so einen uC
verwendet), dann hast du auch gesehen, dass der alle Aktionen
taktgesteuert ausführt. Jeder (Assembler-)Befehl braucht eine bestimmte
Anzahl Takte. Und mit einem 10MHz-Takt sind das dann schnellstenfalls
100ns (z.B. für einen NOP). Weil ja auch die Befehle vor und nach dem
NOP Zeit verbrauchen, kommst du aber niemals tatsächlich auf so eine
kurze Zeit. Und vor allem: du kannst nicht sagen: ich möchte eine
Verzögerung um 266ns...
Luk4s K. schrieb:>> Wie auch, eine einzige Taktperiode ist bei 20MHz Systemtakt 50ns lang.> Stimmt, aber manche AVRs kommen mit einer PLL so weit ich weiß auf bis> zu 64MHz Timertakt.
Ja, und was sollte das bringen? Damit kann man den AVR trotzdem nicht
mit höherer Auflösung als einen Taktzyklus warten lassen.
eProfi schrieb:> Meine Empfehlung:> ein Macro, keine Subroutine (deren Aufruf schon etliche Zyklen bruacht).
Oder eine Inline-Funktion. Die hat unter anderem den Vorteil, daß der
Parameter einen definierten Typ hat.
> #define dly(times) {do while(--times);}>> habe ich jetzt nicht ausprobiert, aufpassen, dass der Optimierer noch> etwas davon übrig lässt, evtl.
Davon wird er nichts übrig lassen.
> #define dly(times) {do asm(nop);while(--times);}
Wozu eigentlich ein nop?
#define dly(times) {do asm volatile (""::);while(--times);}
> Die while(--times) abfrage ist sehr zeiteffektiv, da sie in> dec times> bne> übersetzt wird (anstelle eines Vergleiches wird das Zero-Flag> verwendet).
Kommt auf den Typ von times an.
> einfach hinten eine Null mehr hinzufüge?.... und ist das auch bei 8bit> Mikrocontrollern möglich?
Zwischen ms und ns ist mehr als eine Null unterschied.
Rolf Magnus schrieb:> Luk4s K. schrieb:>>> Wie auch, eine einzige Taktperiode ist bei 20MHz Systemtakt 50ns lang.>> Stimmt, aber manche AVRs kommen mit einer PLL so weit ich weiß auf bis>> zu 64MHz Timertakt.>> Ja, und was sollte das bringen? Damit kann man den AVR trotzdem nicht> mit höherer Auflösung als einen Taktzyklus warten lassen.
Stimmt, macht tatsächlich nur minder Sinn.
>Nur mal 'ne wahrscheinlich doofe Frage: Das zwischen Millisekunden und>Nanosekunden 10 hoch 6 liegt und Mikrosekunden genau dazwischen, ist>bekannt?
Offensichtlich nicht, sonst würde man nicht solche Fragen stellen (vor
allem vor dem Hintergrund, daß ein AVR-Takt üblicherweise bereits
etliche 10ns braucht - er also ohnehin nicht genauer auflösen kann).
Vermutlich meinte er eher µs - das könnte ich mir noch so einigermaßen
als sinnvoll vorstellen. Wenn es wirklich um ns geht, dann machen es
vermutlich auch reine nops, die eine Verzögerung entsprechend der
Taktperiode bwerkstelligen.
Jens G. schrieb:> Offensichtlich nicht, sonst würde man nicht solche Fragen stellen
Jaja, Rätselraten ist alles, was uns bleibt... ;-)
Lothar Miller schrieb:> Damien schrieb:>> allerdings suche ich momentan nach einer delay(nanosekunden)- Funktion.> Sag doch einfach mal, warum und wofür du so etwas brauchst...
Hallo,
danke für die vielen Anregungen :)
Ich möchte ein Dreiecksignal generieren. Dabei soll die Frequenz
300 Mhz betragen(diese muss später erhöht werden)
Ich habe mich heute entschieden einen PIC18F2620 zu nehmen.
Dieser hat 8bit, also 255 Schritte...
Wenn ich jetzt also die Periodendauer T= 1/300Hz durch 4
teile(Dreieckspitzen) erhalte ich 1/1200....
Zwischen jeden Schritt(Erhöhung von 'fr') soll nun eine Verzögerung
eingebaut werden.
Also (1/1200)/255 = 3,3 x (10^-6)
Das sind doch 0,0000033 Sekunden und 3300 Nanosekunden bzw 3,3
Mikrosekunden.
Sollte doch so stimmen oder? Fehlt mir nur noch die Delay-Funktion :)
1
voiddreieck_signal_ausgabe()// Ausgabe des Dreiecksignals
Damien schrieb:> Dabei soll die Frequenz 300 Mhz betragen(diese muss später erhöht werden)
Na dann besorge dir mal einen mikrocontroller mit 1 bis 2 GHz CPU Takt.
Denn den wirst du so ungefähr je nach Anwendung benötigen. (Mal davon
abgesehen, was dort am Pin für ein "Rechteck-"Gemüse bei 300MHz
rauskommt)
Sich über den Unterschied von 300Hz, 300kHz und 300MHz bzw. 300ms oder
300ns nicht im klaren zu sein und das dann auch noch zu kommunizieren
ist für uns, nun sagen wir mal, ein wenig anstrengend.
Denn das sind Unterschiede die hier sehr wichtig sind.
Bitte achte darauf etwas besser.
Ich denke, es ist Zeit, die Popcorn in die Mikrowelle zu legen... 300Mhz
Dreieck in Software, das ist ganz grossartig und auch Richtung weisend.
Thumbs up!
Damien schrieb:> Nein^^ 300Hz :D
Naja, 300Hz Rechteck wäre kein Problem. Aber Dreieck mit 256 Schritten?
Das halte ich schon ohne delay Funktion for hart an der Grenze des
überhaupt machbaren.
Welche Taktfrequenz hat der Mikrocontroller? Wieviel Takte braucht der
so pro increment und branch instruktion?
Entschuldigt!! Das war nicht meine Absicht!
Ich spreche von 300 Hz und wie gesagt, soll die Frequenz später erhöht
werden.. Dann bis 10 kHz( das k ist beabsichtigt ).
Das Ganze läuft dann innerhalb 1s(sekunde) ab.
Ich möchte ein elektromagnetisches Feld erzeugen.
Dabei wird das digitale Signal über ein R2R Netzwerk in ein analoges
Signal
umgewandelt und mit Hilfe von OPs wird das elektromagnetische Feld
erzeugt.
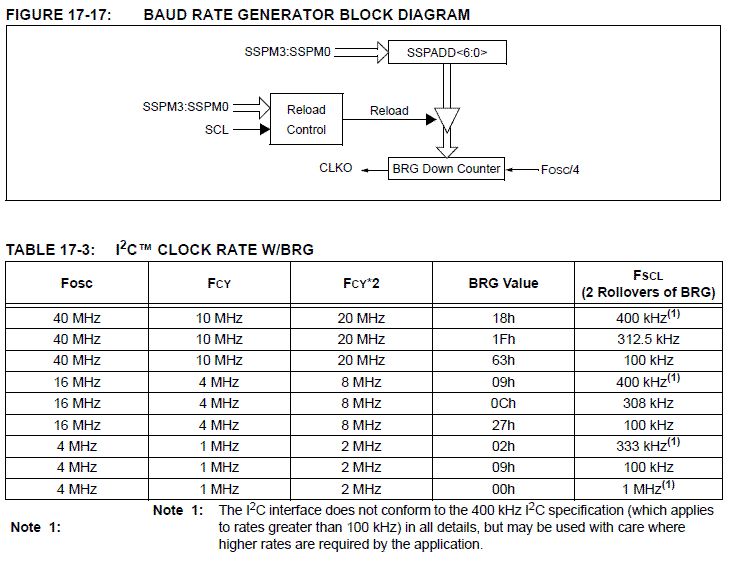
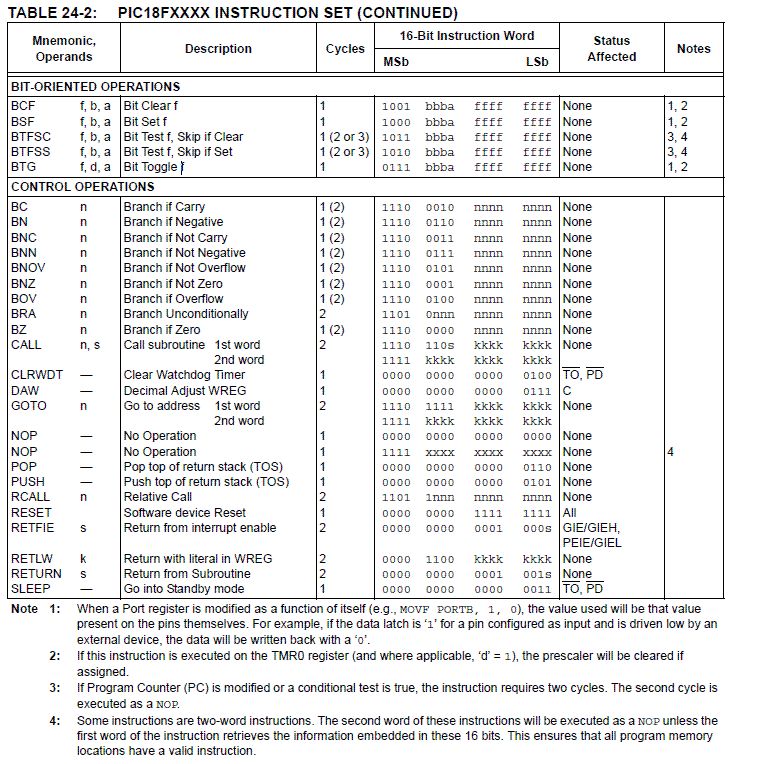
Im Anhang befinden sich die Taktfrequenzen. Soweit komme ich noch mit,
aber
bei 'branch' verstehe ich nicht mehr viel :(
Damien schrieb:> bei 'branch' verstehe ich nicht mehr viel :(
Du solltest unbedingt die Assemblersprache deines PIC lernen und
erstmal anfangen auszurechnen wieviele Befehle du zur Verfügung hast um
deinen Takt überhaupt zu erzeugen.
Das werden nicht viele sein.
Dann musst du ausrechnen wieviele Befehle du mindestens brauchst um
einen Schritt zu erzeugen. Das werden einige sein.
Deine Anwendung befindet sich definitiv sehr nah an der oberen
Leistungsgrenze des Mikrokontrollers und die 10khz Anwendung (mit 256
Schritten) ist mit Sicherheit über der Leistungsfähigkeit des
Controllers.
Rage schrieb:> Hmm, würde es Sinn machen, nur 128 Schritte pro Amplitude zu nehmen?
Das kannst nur du wissen, wie genau dein quantisiertes Dreieck an einem
realen Dreick sein muss.
{kind=link}
{kind=link}