Ich bin dabei ein motorisiertes Foto/Film-Stativ zu bauen und suche Hilfe um Zeit zu sparen. Basis ist der PIC32, die Stativ-Mechanik baue ich selbst mit einer CNC Fräse. Bilder und Details hier: http://wdaehn.blogspot.com/2011_03_01_archive.html Prinzipiell soll es zwei Funktionen haben 1. Panorama-Aufnahmen wie http://www.gigapan.org 2. GPS basierte Verfolgung eines Objekts/Subjekts An sich funktioniert alles, ich möchte es aber auf eine bessere elektronische Basis stellen. * Antrieb über 2-3 NMEA-17 Schrittmotoren mit 16:100 Untersetzung * Schrittmotor Controller verwende ich 3 Stück TMC222 per I2C * MCU würde ich das mikroMMB Board verwenden http://www.mikroe.com/eng/products/view/595/mikrommb-for-pic32-board/ * Funkstrecke des GPS Empfängers per XBEE Pro realisiert Im Moment setze ich gekaufte Platinen ein für die Schrittmotorsteuerung, die MCU und XBee/GPS. Das funktioniert soweit auch alles mit einem PIC18F2550 und meinem C18 Programm, ich möchte aber eine eigene Platine bauen auf der alle Erweiterungen liegen, das mikroMMB PIC32 Board übernimmt die Steuerung. Wer Interesse hat, bitte melden. In zwischen bastle ich weiter... (Grossraum Koblenz/Rhein)
Denkst du auch an den Nodalpunkt, der für Panoramas sehr wichtig ist? http://de.wikipedia.org/wiki/Knotenpunkt_%28Fotografie%29
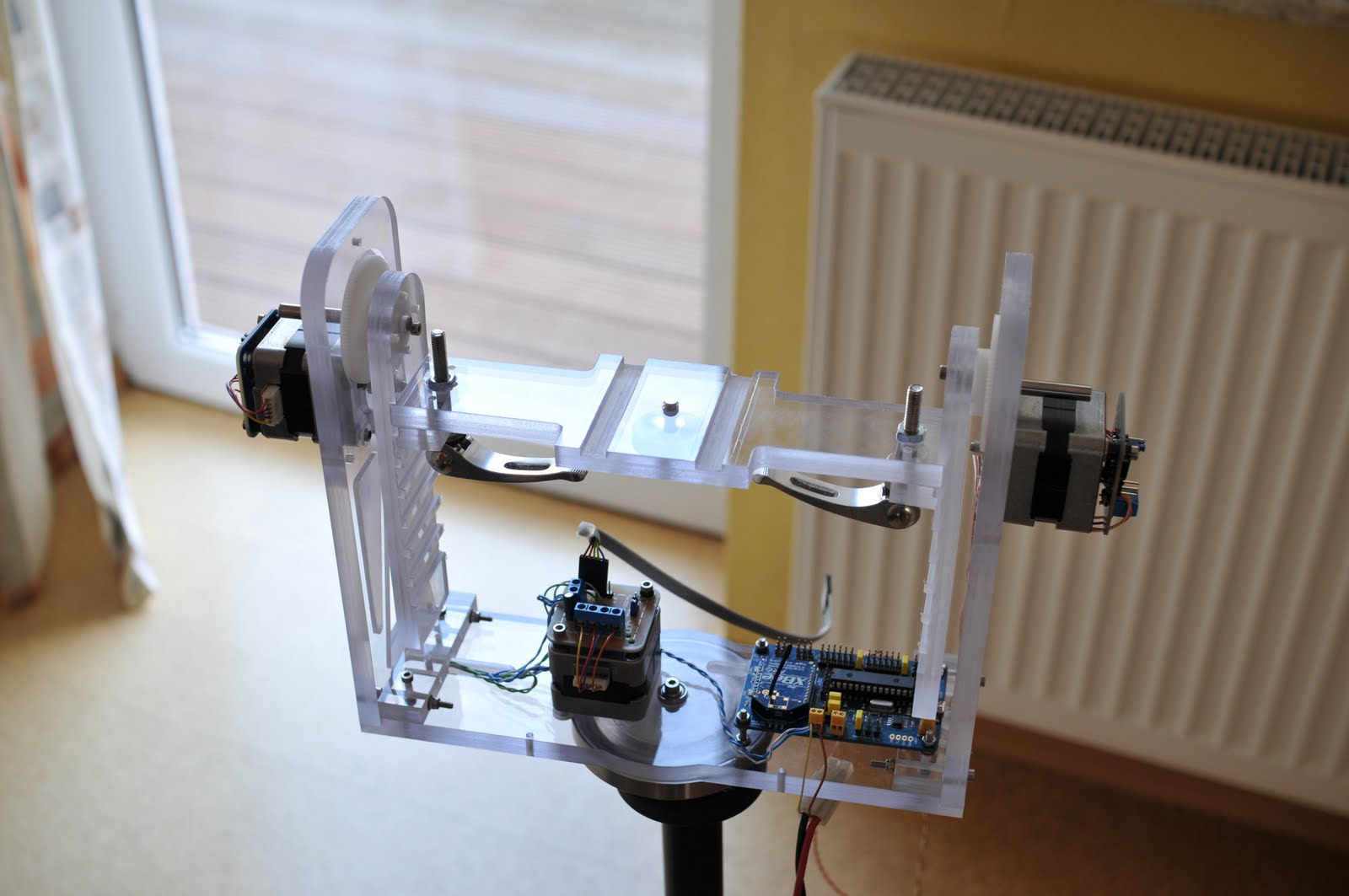
Natürlich. Auf diesem Bild sieht man die Führung mit der das später einmal ermöglicht wird. http://3.bp.blogspot.com/-UgsyZMwoehg/TZHGIek-yHI/AAAAAAAAAEw/eERvIaclXbY/s1600/DSC_9195.JPG
{kind=link}
Moin, wie festgelegt bis du auf die PIC/TMC222 Kombination? Viel ekliger kann ich mir das kaum denken... PICs proggen und dann noch das TMC-SPI-Elend. Oder muss man mittlerweile nicht mehr jeden einzelnen Schritt rübermorsen? Bis zu welchem Gewicht soll das mal funktionieren? Mindestanforderung wäre bei mir Canon 1d+17-40L oder 24-105. Nodaltiefe wird auch noch berücksichtigt? Auf den Bildern erkenne ich nur eine Stufenweise Anpassung der Höhe. Interesse hätte ich schon, nur was soll diese "GPS-Verfolgung sein"? -- SJ
Sven Johannes schrieb: > nur was soll diese "GPS-Verfolgung sein"? Autos bei Rennen tracken? Oder Pferde?
Nodaltiefe ist im Moment nur Stufenweise, das ist korrekt. Auch das möchte ich zu einem späteren Zeitpunkt über den Kreuztisch lösen oder eben die Mechanik anders bauen? Der TMC222 Chip wird auf minimale/maximale Geschwindigkeit sowie Beschleunigung eingestellt, ab dann wird nur noch die gewünschte Absolute Position (-32000 bis +32000 in 1/16 Mikroschritte) angegeben, der Motor fährt mit der Mindestgeschwindigkeit los, beschleunigt bis zur Maximalgeschwindigkeit und bremst dann so wieder ab dass er den Zielpunkt genau anfährt. Eine neue Position kann jederzeit neu angegeben werden, sie wird dann in das Fahrprofil eingebaut. Und der Halte- und Bewegungsstrom wird ebenfalls einmal angestellt. Ist wirklich sehr komfortabel. Das Gewicht ist auch für mich noch nicht 100%ig gelöst. Die Drehbewegung ist kein Problem, da wirken kaum Kräfte dank eines großen Kugellagers, die Tilt-Funktion könnte bei langen Objektiven und ungünstigem Nodalpunkt einen zu großen Hebelarm bedeuten. Lösungen dafür gibt es mehrere: a) Ein Tele für Innenaufnahmen wird nie verwendet, also ist die Nodalpunkt Einstellung bei solchen Objektiven nicht so wichtig. Kurze wie die von Dir genannten gehen. (Ich verwende eine Nikon D300, Abmessungen passen aber auch zu D3/Mark 1d Klasse von DSLRs) b) Wie bei Teleskopen mit Ausgleichgewichten arbeiten um das Drehmoment zu reduzieren c) stärkere Motoren, höhere Ströme, mehr Volt Ja, die GPS Verfolgung dient dazu um Videoaufnahmen eines bewegten Objekts zu machen, z.B. Windsurfer trägt das GPS bei sich und wird gefilmt. Per Hand ist das praktisch nicht zu machen weil ohne Stativ man nur herumwackelt und sich keiner für mehrere Stunden in den Sandsturm stellt und immer dann eine Aufnahme macht, wenn der Surfer gerade in einer vernünftigen Distanz zum Strand ist. Was würdest Du statt PIC/TMC222 vorschlagen?
Moin, µC wäre für mich irgendetwas mit Freeware C-Compiler, PIC Assembler mache ich NIE wieder und die Suite werde ich mir mal so nicht kaufen. Also irgenein AVR Derivat, dafür hätte ich alles da. Wenn der TMC222 das jetz so macht ist das ok. Ich habe noch mit älteren Exemplaren gearbeitet und da musste man noch quasi jeden Schritt im Voraus berechnen und per SPI morsen. Da hätte ich eher eine der integrierten Lösungen von TI vorgeschlagen oder einen Servoantrieb => erledigt sich dann auch gleich die Frage nach der Positionierung von großen Gewichten (Rückmeldung). Der Stepper kann ja doch unbemerkt durchrutschen; werde ich mal drüber nachdenken. Gegengewichte machen das Gerät auch nicht schneller => Massenträgheit. Die GPS Verfolgung ist dann ein ganz anderes Thema. XBee wird ja kaum über 100m Reichweite schaffen und Surfer sind ZIEMLICH fix. Selbst wenn mal einer rannkommt muss sich die Kamera doch sehr schnell ausrichten und verfolgen => mit einer langen Brennweite ist das schon spannend. Abgesehen davon, was nimmst du eigentlich als Genauigkeit für GPS an? Ohne Korrektur der Plausibilität durch bekannte Straßen (Navi) kommt ein GPS nicht näher als 15m an die "echte" Position ran. -- SJ
Sven Johannes schrieb: > Die GPS Verfolgung ist dann ein ganz anderes Thema. ... > Abgesehen davon, was nimmst du eigentlich als Genauigkeit für GPS an? Die Standardabweichung (2/3 der Werte) liegt bei anständigem Empfang innerhalb eines 3,5 Metern Kreises. Für eine vernünftige Verfolgung wäre sicher ein Kalman-Filter für die Position eine gute Maßnahme.
Ich denke mir die GPS Verfolgung und Panorama sind vom Grundsatz her verschiedene Anwendungen mit der gleichen Mechanik. Bei Panoramaaufnahmen wird man tendenziell große Brennweiten verwenden aber keine schnellen Bewegungen - Massenträgheit ist also nicht so wichtig. Bei GPS verwendet man eher kleiner Brennweiten, wahrscheinlich sogar nur eine kleine Handycam. GPS Genauigkeit ist um die 5m. Das wird sicher nicht ausreichen um jemanden in 1km Entfernung formatfüllend im Bild zu halten, aber das ist auch nicht der Anspruch. Auch ist die GPS Genauigkeit nicht wirklich der entscheidende Faktor, sondern die Anzahl der Positionen und wie viele davon die Funkstrecke verloren gehen. In einer ersten Version hat sich das Stativ ruckartig auf die GPS Position bewegt, ist dann für eine Sekunde dort verharrt bis der GPS Receiver die nächsten Koordinaten bekommt und übertragen hat. Und wieder ruckartig die neue Position angefahren. Das Ergebnis war nicht zu ertragen. Im neuen Code schleppe ich die Kamera immer eine Sekunde hinterher. Ich bekomme also die neue Position and stelle die Fahrzeiten so ein dass die Kamera dort in einer Sekunde hinsehen wird. Fehlt eine Position behalte ich die Drehgeschwindigkeit bei. Das Ergebnis ist eine schöne, gleichmäßige Bewegung und die Person ist zwar nicht in der absoluten Bildmitte sondern nur innerhalb eines Rechtecks das sich aus der Fahrgeschwindigkeit und der Brennweite (und den Ungenauigkeiten) ergibt. In 10m Entfernung am Stativ vorbei fahren sprengt die Grenzen des machbaren, obwohl das Stativ an sich mit bis zu 180°/sek bewegt werden könnte. Auch hier sind wieder Optimierungsmöglichkeiten gegeben, der u-blox GPS Chip sendet etwa alle 0.25sec eine Position anstatt nur einmal pro Sekunde. Und man könnte einen zweiten GPS Empfänger fest am Stativ belassen. Wenn der zweite Empfänger also sagt, das Stativ hat sich um 2m nach Norden bewegt, weiß man dass eine athmospärische Störung vorliegt und der entfernte GPS Empfänger wird mit hoher Wahrscheinlichkeit ebenfalls um 2m zu weit nach Norden anzeigen. Habe ein paar Forschungsergebnisse zu so einem hand-made Differential GPS gegoogelt die das nahelegen. XBees haben eine Reichweite von 1.6km. Die PICs programmiere ich mit dem freien C18 bzw. C32 C Compiler. Und ich kenne eben nur PICs, habe aber kein Problem andere zu verwenden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.