Wie schon im Titel beschrieben verstehe ich nicht den Unterschied zwischen Unterschied Synchronmaschine und Brushless DC Motor. Beide scheinen doch identisch aufgebaut zu sein. Die Frage ist warum man beim BLDC eine Lageerkenung über die Phasenspannungen macht zum regeln. Reicht es da nicht einfach ein rotierendes Feld an den 3 Spulen zu erzeugen, und der Rotor folgt diesem Feld dann synchron, bzw mit einem Lastwinkel. Für Drehzahlregelung reicht das doch völlig aus oder?
Hmmm. Im Leerlauf mag das vielleicht funktionieren aber wenn du eine Last an der Ankerwelle hast (z.B.Hubwerk mit unterschiedlichen Lasten) weißt du nicht wie weit der Anker aufgrund des unterschiedlichen abgenommenen Drehmoments deinem Drehfeld hinterherhinkt. Im schlimmsten Fall würde es passieren daß das ganze mechanische System bei falscher Kommutierung (Bestromung in Abhängigkeit von der Zeit) ins schwingen gerät. Wir hatten mal so einen ähnlichen Fall, da war an einem umrichtergesteuerten Asynchronmotor der Resolver (Drehgeber) locker. Der Motor, groß wie ein Bierfass, wurde falsch bestromt und hat fast die ganze Maschine kaputtgerüttelt.
Rainer schrieb: >Reicht es da nicht einfach ein rotierendes >Feld an den 3 Spulen zu erzeugen,.... Ja schon. Aber dann wäre es ein Sync-Motor Beim DCBL will man aber nur eine einfache Gleichspannung als Energielieferant. Auch soll die Höhe der Drehzahl von der Höhe der Gleichspannung abhängen.
Unter einer Syncronmaschiene versteht man im Algemenen eine "fremd Erregte" Maschiene. Unter BLDC eher eine "permanent (Magnete) Erregte" Maschiene. BLDC ist ein anderer Name für permanent erregte Synchronmaschiene. Der Unterschied liegt in der Art der Ansteuerung, also im Kontroler. Volker
Hi in der Ansteuerung liegt der Unterschied nicht, denn auch eine fremderregte Synchronmaschine kannst du im Blockbetrieb, bzw. mit Trapezspannung fahren. Grundsätzlich ist ein BLDC eine PMSM(permanenterregte Synchronmaschine) für Kleinspannungen. Mehr Unterschied ist dabei nicht. Bei einer PMSM geht man von einer Zwischenkreisspannung aus, die aus dem Netz gespeist wird also zw. 400V und 800V liegt, ein BLDC wird üblicherweise mit nicht mehr als 48V betrieben. Bei der Ansteuerung interessieren nur die Verluste. Bei einer Feldorientierten Regelung hat man weniger Verluste, sie ist aber aufwendig. Nimmt man nur Trapezanteuerung ala China BLDC-Regler, dann hat man mehr Verluste, bei einigen BLDC wird das dadurch kompensier, dass die BEMF(Elektromagnetische Rückwirkung) an die Ansteurung angepasst wird. Dh. der Motor induziert eine trapezförmige Spannung wenn man in dreht und nicht sinusförmig wie üblich. Ich hoffe das war jetzt nicht zu viel Fachchinesisch MfG Tec PS: Synchronmaschine heißt nicht das der Rotor synchron zum Drehfeld läuft, sonder anders herum das bedeutet das du das Drehfeld synchron zum Rotor führen musst, deshalb musst du wissen wie der Rotor steht, deshalb ist die Ansteuerung auch Aufwendiger.
die BLDC Motoren sind üblicherweise permanenterregte Motoren. Die gleichen Typ Motoren werden auch in großeren Antrieben verwendet. Dabei macht man jedoch eine Unterscheidung in der Art der Ansteuerung. Bei den BLDC-Motoren wird üblicherweise einfach die EMK der Maschine gemessen, und dann zwei der drei Phasen bestromt. Der Strom selbst wird in seiner Amplitude geregelt, ist aber konstant, also nichtsinunsförmig. Der dabei entstehende Maschinenstrom ist üblicherweise blockförmig. Bei den größeren Maschinen macht man eine feldorientierten Regelung. Der Strom wird in allen drei Phasen sinusförmig geregelt. Die Steuerung ist dann allerdings wesentlich aufwändiger. Die Verluste sollten geringer sein, die Regelung ist dynamischer, Drehmoment bei Drehzahl 0 ist kein Problem. Grüße OR
Eine Synchronmaschine und ein BLDC sind eignetlich dasselbe. Aber. Eine Synchronmaschine laeuft ueblicherweise auf einer festen Drehzahl. Falls nicht, dann schltet man eine Frequenzsteuereinheit dazwischen, die die Funktionalitaet eines BLDC Controllers uebernimmt. Da Synchronmaschinen ueblicherweise fuer viel hoehere Leistungen gebaut sind, sind die grossen Frequenzumrichter mit Thyristoren aufgebaut. Der Frequenzumrichter passt neben der Frequenz auch noch die Spannung an. Zudem ist es moeglich mit Synchronmaschinen Blindleistung zu erzeugen indem man ueber- resp untererregt.
Ein BLDC Motor und eine permanenterregte Synchronmaschine sind nicht dasselbe! Sind sich sehr ähnlich, aber es gibt einen kleinen Unterschied im Aufbau. Der entscheidende Unterschied ist die Magnetisierungsrichtung der Mangete in Rotor. Der eine ist radial magnetisiert, der andere linear. Ich weis nicht, wie ich es erklären soll. Vielleicht hilft diese Skizze: \|/ ||| -.- ||| /|\ ||| Aufgrund dieser Mangetisierungsrichtung ergeben sich die unterschiedlichen Ansteuerverfahren (Blockförmig, Sinusförmig). Es gibt auch permanenterregte Synchronmaschinen für kleine Spannungen und kleine Leistungen. Werden sehr häufig im Anlagen- und Maschinenbau eingesetzt. Bei größeren Leistungen ist eine Spule im Rotor verbaut. Hier bekommt man dann zusätzliche Freiheiten, da man das Rotorfeld beeinflussen kann. Oder als Generatoren im Kraftwerken.
Angehängte Dateien:
-

BLDC_PSM.png
15 KB
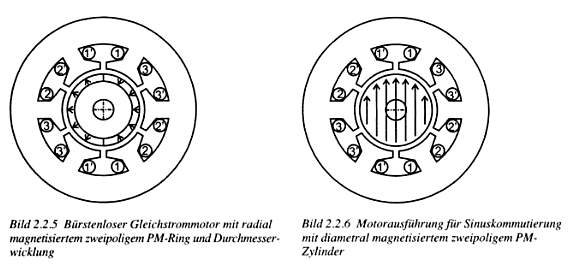
Ich hab mal ein Bild angehängt. Es stammt aus dem "Hanbuch elektrischer Kleinantriebe" (ISBN 3446210075). Kann ich nur empfehlen. Gibt es auszugsweise auch bei Google-Books.
Die Magnetisierung spielt keine Rolle bei der Unterscheidung, sie ist nur interessant bei der Anpassung an die Ansteuerug, an trapez- (geschaltetem) vs. sinusförmigem Strom. BLDC und Synchronmaschine sind dasselbe, die Unterscheidung kann man weniger an der Leistung als an der Stromversorgung ausmachen. BLDC wird halt mit Gleichstrom versorgt, die Elektronik gehört dazu, Synchronmaschinen hängen an Dreh- strom, normalerweise fester Frequenz aus dem Netz, notfalls per Frequenzumrichter, die Elektronik gehört nicht dazu. Zudem ist richtig, daß BLDC einen Permanentmagneten haben dürfen, während grosse Synchronmotoren diesen nicht haben können. Erstes weil der Permanentmagnet ummagnetisiert werden könnte wenn eine grosse Maschine überlastet wird, und zweitens weil grosse Motoren nicht an fester Frequenz angefahren werden könnten, wenn das Feld permanent wäre. Die Hallsensoren am BLDC haben NUR die Aufgabe, den Motor problemlos anlaufen lassen zu können. Sie geben vor, wie schnell man die Drehfrequenz steigern kann. Ohne Sensoren kann man einfach ganz langsam das Drehfeld steigern, in der Hoffnung daß der Motor mit seiner Trägheit mitkommt. Denn kommt er mal nicht mit, verliert man völlig die Kontrolle und bekommt den Motor auch nicht wieder in sync. Letztlich verbessert also der Hallsensor das Drehmoment beim Anlaufen. Das gilt auch für Synchronmotoren an Frequenzumrichtern, der Hallsensor alleine ist also auch keine Unterscheidung.
MaWin schrieb: > Die Magnetisierung spielt keine Rolle bei der Unterscheidung, > sie ist nur interessant bei der Anpassung an die Ansteuerug, > an trapez- (geschaltetem) vs. sinusförmigem Strom. > BLDC und Synchronmaschine sind dasselbe, ... Ja, das mit der Ansteuerung ist natürlich richtig. Für mich ist dies jedoch die Grenze. Nur solange ich den BLDC blockförmig ansteuere, verhält er sich wie ein Gleichstrommotor. > BLDC wird halt mit Gleichstrom versorgt, die > Elektronik gehört dazu, Synchronmaschinen hängen an Dreh- > strom, normalerweise fester Frequenz aus dem Netz, notfalls > per Frequenzumrichter, die Elektronik gehört nicht dazu. Beim Vergleich BLDC und Synchronmotor bin ich von vergleichbar großen permanenterregten Synchronmotoren (PSM) ausgegangen, wie sie zu Hauf im Anlagenbau Verwendung finden. Diese werden in der Regel mit einem Umrichter betrieben, da sie meist eine deutlich höhere Nennfrequenz als 50Hz besitzen. Aber auch hier gibt es keinen Unterschied zu der Endstufe für BLDC Motoren, beides sind dreiphasige Brücken, die aus einer Gleichspannung versorgt werden. Für größere Synchronmaschinen gibt es keine Magnete, die genug Fluss erzeugen um das hohe Drehmoment "übertragen" zu können. Hier muß man zwangsweise eine Rotorwicklung vorsehen. Diese bietet, wie gesagt, noch andere Vorteile. *Letztlich sind BLDC und PSM sehr ähnlich, der Übergang ist fließend. Vermutlich hat hier jeder eine eigene Definition.* Synchonmotor ist eigentlich der Oberbegriff für alle Antriebe, die keinen Schlupf haben (auch Schrittmotoren gehören z.B. dazu). > Die Hallsensoren am BLDC haben NUR die Aufgabe, den Motor > problemlos anlaufen lassen zu können. Sie geben vor, wie > schnell man die Drehfrequenz steigern kann. Ohne Sensoren > kann man einfach ganz langsam das Drehfeld steigern, in > der Hoffnung daß der Motor mit seiner Trägheit mitkommt. > Denn kommt er mal nicht mit, verliert man völlig die > Kontrolle und bekommt den Motor auch nicht wieder in sync. > Letztlich verbessert also der Hallsensor das Drehmoment > beim Anlaufen. Das gilt auch für Synchronmotoren an > Frequenzumrichtern, der Hallsensor alleine ist also auch > keine Unterscheidung. Ja, volle Zustimmung. Auch die PSM kann man stur mit U/f Kennlinie am Umrichter fahren. Wenn man Dynamik will kommt man um eine Rückführung aber nicht herum.
Rainer schrieb: > Wie schon im Titel beschrieben verstehe ich nicht den Unterschied > zwischen Unterschied Synchronmaschine und Brushless DC Motor. Beide > scheinen doch identisch aufgebaut zu sein. Die Frage ist warum man beim > BLDC eine Lageerkenung über die Phasenspannungen macht zum regeln. Das sind zwei ganz unterschiedliche Dinge, auch wenn es Ähnlichkeiten gibt. Ein Brushless DC Motor ist, wie der Name es schon andeutet, ein Gleichstrommotor bei dem der Polwender, aKa Bürsten und Kollektor durch etwas anderes ersetzt wird, meist durch Halbleiter. Das geht rein mechanisch nur dann vernünftig, wenn ich stehenden Dauermagneten und rotierenden Elektromagneten tausche. Sonst müßte ich den Rotor z.B. über Schleifringe versorgen und die Steuerelektronik auf den Anker setzen. Für die magnetischen Verhältnisse ist dieser Tausch egal. Auch bei einem Brushless erzeuge ich ein Magnetfeld, das möglichst orthogonal zum Feld des Dauermagneten ist, das erzeugt mir das größte Drehmoment. Zur Lageerkennung kann ich alles mögliche nehmen, Hallsensoren, Drehgeber (Kamera mit Bilderkennung?) oder auch die in den Wicklungen durch den Rotor induzierte Spannung. Wie induziert aber schon sagt, wird dafür eine Magnetfeldänderung benötigt, d.H. bei einem stehenden Motor keine Spannung. Verfügt man über keine anderen Sensoren, kann man sich manchmal damit behelfen, den Motor langsam ungesteuert anzufahren, bis die Lageerkennung anspricht. Bei stark wechselnden Lastbedingungen geht das aber nicht zuverlässig. Ein Fahrzeug könnte so nicht anfahren. Bjojon schrieb: > Synchonmotor ist > eigentlich der Oberbegriff für alle Antriebe, die keinen Schlupf haben > (auch Schrittmotoren gehören z.B. dazu). Da würden auch DC Motoren drunter fallen, das Feld wird durch den Kommutator immer so gesteuert, daß keinen Schlupf hat. MfG Klaus
MaWin schrieb: > Die Hallsensoren am BLDC haben NUR die Aufgabe, den Motor > problemlos anlaufen lassen zu können. Sie geben vor, wie > schnell man die Drehfrequenz steigern kann. Ohne Sensoren > kann man einfach ganz langsam das Drehfeld steigern, in > der Hoffnung daß der Motor mit seiner Trägheit mitkommt. Das ist nicht so. Ohne Sensoren, egal ob Hallsensoren oder GegenEMK geht das nicht. Was du beschreibst, ist ein Schrittmotor. Sobald eine signifikante Laständerung stattfindet, MaWin schrieb: > verliert man völlig die > Kontrolle und bekommt den Motor auch nicht wieder in sync. An ein paar Indizien läßt sich das leicht erkennen: mit einem Brushless erreiche ich leicht 20 000 Umdrehungen und mit Feldschwächung auch noch mehr, mit einem Schrittmotor ähnlicher Größe nur einen Bruchteil davon. MfG Klaus
Hallo, Einen BLDC Motor lässt man im Schrittmotorbetrieb ungeregelt anlaufen bis die nötige Drehgeschwindigkeit für die Reglung durch Messung der rückinduzierten Spannung erreicht ist. Wärend dem Schrittmotorbetrieb läuft der Motor sehr ineffizient und erzeugt viel Blindleistung. Zum Anlaufen wird auch ein relativ hoher Strom benötigt, da man sichergehen muss, dass der Motor auch vernünftig anläuft. Einen BLDC Motor aber ohne Messung mit starrer Kommutierung zu betreiben funktioniert niemals vernünftig. Der Motor braucht viel Strom und bei der kleinsten Belastung "knattert" es ganz furchtbar und der Motor dreht sich nicht mehr, weil die mech. und elektr. Drehfrequenz auseinanderdriften.
Jonny Obivan schrieb: > Einen BLDC Motor lässt man im Schrittmotorbetrieb ungeregelt anlaufen > bis die nötige Drehgeschwindigkeit für die Reglung durch Messung der > rückinduzierten Spannung erreicht ist. Wärend dem Schrittmotorbetrieb > läuft der Motor sehr ineffizient und erzeugt viel Blindleistung. Zum > Anlaufen wird auch ein relativ hoher Strom benötigt, da man sichergehen > muss, dass der Motor auch vernünftig anläuft. Das geht nur im "Schönwetterbetrieb", d.H. bei konstanter und bekannter Last. Gibt man zuviel Strom, überholt der Motor das Feld und kommt auch aus der Synchronisation. Für ein Elektrofahrad taugt so was z.B. nicht. Sensorlos kann man damit aus dem Stand nicht anfahren. MfG Klaus
Hallo Klaus, Brushlessmotoren ohne Sensoren habe ich bislang auch nur im Modellbau (klassisches Beispiel: Quadrokopter, Boote, U-Boote, ferng. Autos usw...) gesehen. Ich vermute mal, dass bei Fahrrädern (oder anderen undefinierten und großen Anfangslasten) immer Motoren mit Halsensoren genutzt werden.
Bin mit sensorlos Brushless schon vor über 10 Jahren Modellauto gefahren. Auch mit Laufrichtungswechsel während der Fahrt. Der Controller hat gebremst und dann rückwärts beschleunigt. Dürften mittlerweile noch besser sein die Controller... Mit der Übersetzung ist die Last nicht mehr so groß.
Jonny Obivan schrieb: > Brushlessmotoren ohne Sensoren habe ich bislang auch nur im Modellbau > (klassisches Beispiel: Quadrokopter, Boote, U-Boote, ferng. Autos > usw...) gesehen. Ich vermute mal, dass bei Fahrrädern (oder anderen > undefinierten und großen Anfangslasten) immer Motoren mit Halsensoren > genutzt werden. Man kann das in der Praxis auch leicht verschummeln, wenn man ihn wie einen Benziner behandelt, mit einer Fliehkraftkupplung. Dann kann er unbelastet hochlaufen und wenn die Drehzahl stimmt, kommen Regelung und Kupplung. Roland schrieb: > Auch mit Laufrichtungswechsel während der Fahrt. Der Controller hat > gebremst und dann rückwärts beschleunigt. Sensorlos heißt ja nicht ungesteuert. Sensorlos klingt elegant und ist in. Es heißt auch immer, es ist billiger. Die Hallsenoren kosten aber eigentlich Pfennige, bei einem Motor für einige hundert € fällt das kaum ins Gewicht. Mir hat aber jemand mal vorgerechnet, wie er das sieht: was keinen CAN-Bus hat ist kein Sensor. Hallsensoren sind keine wirklichen Sensoren, sondern Spielkram. Ein Absolutwert-Winkelsensor an einem Motor kostet also ... Wenn man so rechnet ist sensorlos viel billiger. MfG Klaus
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.