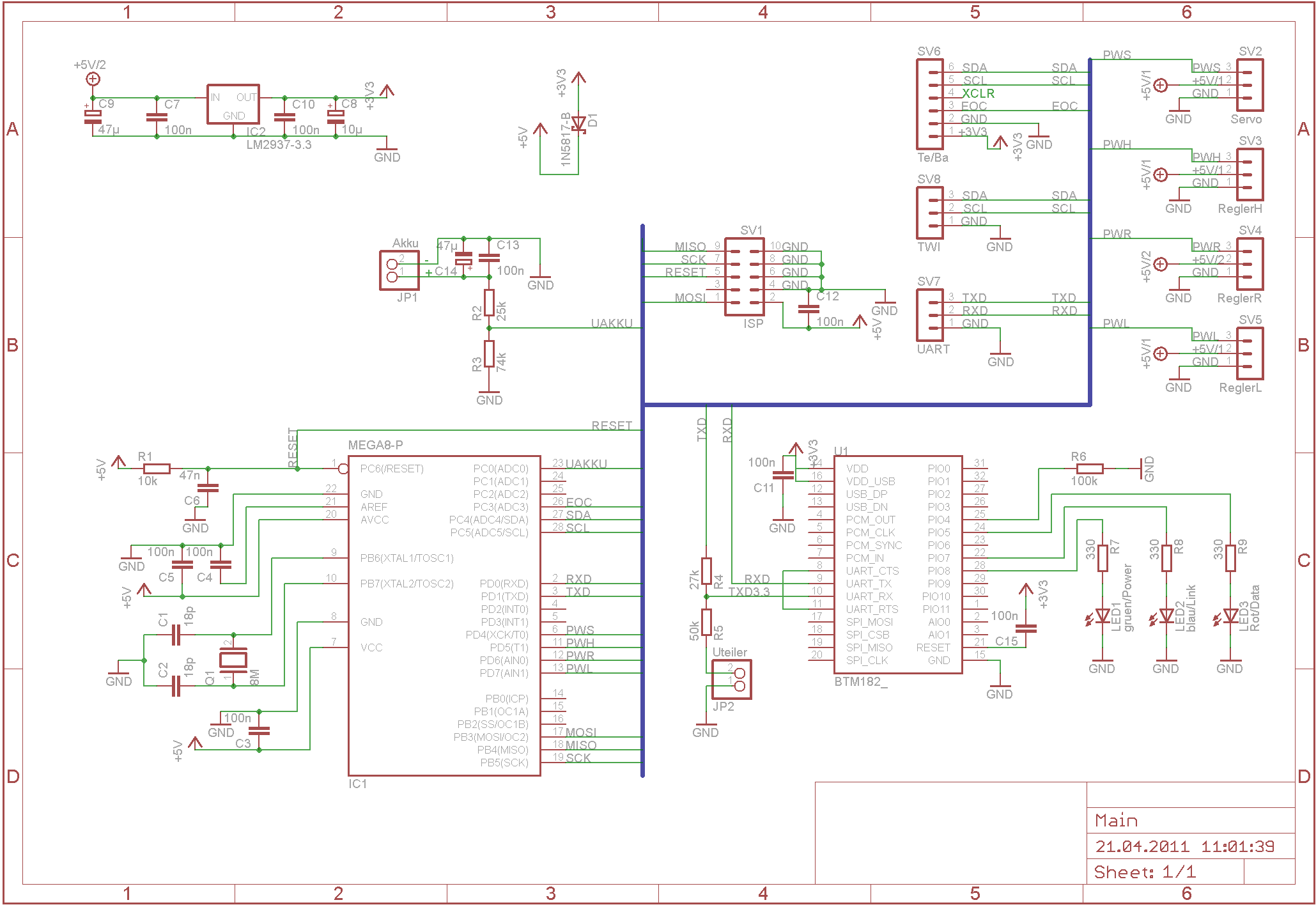
Hallo liebe Forengemeinde, ich habe hier zusammen mit 2 anderen ein Projekt am Laufen, in dem ein Zeppelin von selbst fliegen kann (nach GPS-waypoints usw...). Die ganze Software soll auf einem Android Smartphone laufen, und mein Part des Projektes ist die Verbindung zwischen Servos/Fahrtenreglern und dem Smartphone. Weil das Smartphone zusätzlich kein Höhenmesser und Temperaturmesser besitzt, wird dieser auch noch extern angeschlossen. Um dieses Problem zu lösen, benutze ich als Hauptsteuerung einen AtMega8. Zusätzlich: -Die Akkuspannung wird über einen Spannungsteiler gemessen. -Die Verbindung zum Smartphone wird über einen BTM182 hersgestellt (Bluetooth SPP). Dieser ist mit der Schaltung angeschlossen, die beim BTM222 im Datenblatt als Beispiel steht. -Das AVR wird über ISP programmiert -Als Temperatur/Barometer Sensor wird dieser hier verwendet: http://www.watterott.com/de/Breakout-Board-mit-dem-BMP085-absoluten-Drucksensor welcher mit I2C an den AVR angeschlossen wird. Auf dem Breakout-Board befinden sich auch schon die Pull-Up Widerstände. -Die Servos werden per PWM angesteuert. Zur Spannungsversorgung: Die BEC Spannungsversorgung wird über einen LM2937-3.3 in 3.3V umgewandelt. daraus wird über eine Schottky-Diode der AVR und das Bluetoothmodul und der Temperatursensor mit Spannung versorgt. Sinn dieser Schottky Diode ist es, das man keinen Pegelwandler am ISP Programmierer braucht. Hier kann man einfach den µC über 5 Volt mit Spannung versorgen, sodass man ihn auf gleichem Pegel programmieren kann. Die restlichen Servos/Fahrtenregler werden aus einem 2ten BEC gespeist. Meine Fragen: Fallen an meinem Schaltplan irgendwelche Fehler auf? Hat jemand schon ein paar Erfahrungen mit dem BTM182 gesammelt? Das Datenblatt ähnelt zwar dem BTM112, ist aber ziemlich gekürzt. Passen die Koppelkondensatoren? grüße Spitti
Angehängte Dateien:
-

schaltplan_2011-4-21.png
38 KB
Was soll der Mega8 ? Nimm einen Mega32, aller drunter ist zu schnell voll.
...oder einen Mega328(p)... Da muss das Layout/der Schaltplan nicht geändert werden und man hat 32k Flash + 2k SRAM.
Das mit der Schottky würde ich lassen. Parallel zu R3 einen (47nF?) Kondensator nach Masse. Stromkreis der Servos saut rum, daher Zuleitung zum Spannungsregler noch mit einer Drosselspule gegen Störungen die zu schnell sind als daß der Spannungsregler sie ausregeln kann abblocken. Ansonsten sieht man wenig ausser Stecker. Es ist ein ambitioniertes Projekt. Ihr werdet mit Software und Störungen zu kämpfen haben. Gegen Störungen hilft ein funksolider Aufbau.
Den praktischen Nutzen von D1 würde ich mal in Frage stellen. Wenn D1 leitend wird hast du schon etwa 5,5V auf den 3V3. Dann mach doch lieber eine Zenerdiode 3V6 zwischen 3V3 und GND.
Habt ihr mal getestet ob GPS überhaupt genau genug ist? Das kann schon mal um 10m schanken. Dazu kommt das ein Zeppelin sehr windanfällig ist, eventuell schon mal lieber ein paar anderen Sensoren wie Beschleunigung und Kompass/Gryo vorsehen.
Peter II schrieb: > Dazu kommt das ein Zeppelin sehr windanfällig ist, > eventuell schon mal lieber ein paar anderen Sensoren wie Beschleunigung > und Kompass/Gryo vorsehen. Nungut, deshalb ja das Smartphone. Es hat Digitalen Kompass und Beschleunigungssensoren. Sodurch benötigen wir das nicht extra. MaWin schrieb: > daher Zuleitung zum Spannungsregler noch mit einer > Drosselspule gegen Störungen die zu schnell sind als > daß der Spannungsregler sie ausregeln kann abblocken. Wie groß sollte die Spule dann in etwa sein? würde denn so eine reichen: http://www.reichelt.de/Fest-Induktivitaeten-axial/SMCC-15-/index.html?;ACTION=3;LA=444;GROUP=B512;GROUPID=3179;ARTICLE=18195;START=0;SORT=artnr;OFFSET=16;SID=11TY866n8AAAIAACIWJwgfe9dd3b6a2008dc930bb9f6dd2bdb7d3 ? MaWin schrieb: > Gegen Störungen hilft ein funksolider Aufbau. Welche Maßnahmen würden den bei meinem Fall zu einem funksoliden aufbau führen? ich schrieb: > Den praktischen Nutzen von D1 würde ich mal in Frage stellen. Wenn D1 > leitend wird hast du schon etwa 5,5V auf den 3V3. > > Dann mach doch lieber eine Zenerdiode 3V6 zwischen 3V3 und GND. Das verstehe ich jetzt nicht ganz. Warum sollte sie denn in Sperrrichtung leitend werden? Wenn 5Volt an der ISP Schnittstelle und 3,3 Volt vom Spannungsregler gleichzeitig anliegen, so wird ja nur der AVR mit 5 Volt versorgt, während die restlichen 3,3V Komponenten weiter mit 3,3Volt laufen, sodass man den AVR programmieren ohne Pegelwandler kann. Wenn man jetzt den ISP stecker zieht, so läuft der AVR auf 3,3V, sodass er mit der restlichen Elektronik nur eine Spannungsversorgung braucht. Die Schottky-Diode dient ja nicht zum Spannungsglätten oder als Überspannungsschutz. Du darfst mich aber gerne eines besseren Belehren. (Ein) schrieb: > ...oder einen Mega328(p)... Das Modul hat nur die Aufgabe die Daten via des Bluetooth Moduls an das Smartphone zu übertragen bzw. die Daten vom Smartphone kommen, also Werte für den Fahrtenregler/Servos, zu verarbeiten. Der µC übernimmt keine Steuerungsaufgaben. Reicht in dem Fall ein Atmega8 nicht aus? Ich weiß leider nicht wo ich den Mega328(p) im DIP gehäuse kaufen kann...
Spitti schrieb: > Das Modul hat nur die Aufgabe die Daten via des Bluetooth Moduls an das > Smartphone zu übertragen bzw. die Daten vom Smartphone kommen, also > Werte für den Fahrtenregler/Servos, zu verarbeiten. Der µC übernimmt > keine Steuerungsaufgaben. Reicht in dem Fall ein Atmega8 nicht aus? Ich > weiß leider nicht wo ich den Mega328(p) im DIP gehäuse kaufen kann... sorry jetzt hab ich ihn gefunden es wird der Mega328p verwendet. sicher ist sicher gruß & danke nochmal an alle
> Wie groß sollte die Spule dann in etwa sein? Ausreichend Strom (hat sie) aber möglichst mehr als 15uH, so 47uH fände ich gut. Zu gross (über 100uH) ist auch schlecht, weil man möglichst die hohen Frequenzen dämpfen will. Wenn die Spule als UKW-Drossel beworben wird, ist sie geeignet, meist sind die so stabförmig wie die von dir ausgesuchte. > Welche Maßnahmen würden den bei meinem Fall zu einem funksoliden > aufbau führen? Alles was langer Draht ist, wirkt als Antenne. Also auf kurze Verbindungen achten, überlege für jede Leitung durch die Strom fliesst wo in dem Moment der Strom wieder zurück fliesst, und lege beide Leitungen dicht beieinander, parallel, bei Draht würde man verdrillen. Eine Massefläche (in der keine Schlitze sein sollten, Stichwort Schlitzantenne) unter der ganzen Schaltung verhindert Einstreuung von Funkwellen. BlueTooth-Modul möglichst weit weg von uC, Servos möglichst weit weg von uC und BlueTooth, Stromversorgungsleitungen zu den Servos möglichst früh vom Akku von der Stromzuleitung zum uC-Board abzweigen lassen, nicht Stromzufuhr zum Servo über die Platine führen. Es ist also eher ein Aufbauproblem als ein Schaltplanproblem. Wobei gut platzierete 100nF (oder 47nF) Kondensatoren auch ein wenig dämpfend wirken.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.