

Hi, wie der Betreff schon sagt beschäftige ich mich gerade mit dem aktiven Freilauf von BLDC´s. Ich habe zwei Screenshots angehängt: "Ohne_Freilauf": Dargestellt sind die Steuersignale der 6 FETs: - Ux, Vx, Wx sind die drei Motorphasen - H steht für High Side FET - L steht für Low Side FET - Spare 0 ist ein Debugsignal Die Abschnitte A bis F kennzeichnen den Beginn der BLDC typischen 6 Phasen Ansteuerung. D.h.: Abschnitt A-B: UH = VCC, WL = GND mit überlagerter PWM Abschnitt B-C: VL = GND, UH = VCC mit überlagerter PWM usw. Mit dieser Ansteuerung läuft der Motor einwandfrei. "Aktiver_Freilauf": Entspricht im wesentlichen dem vorherigen Screenshot nur mit dem Unterschied das in den PWM Off Phasen der korrespondierende FET eingeschaltet wird um die FET interne Diode zu brücken. Damit kein Kurzschluss zwischen den yH un yL FETs auftreten kann liegt jeweils eine Totzeit von 5[us] zwischen den Umschaltzeitpunkten. Problem: Wenn der Motor mit dem "aktiven Freilauf" Muster zwangskommutiert wird (um BEMF Sensing Probleme auszuschliessen) bleibt der Motor schlagartig mit hoher Stromaufnahme stehen. Frage: - Ist dies die korrekte Ansteuerung für "aktiven Freilauf" ? - Wenn ja hat jemand eine Idee wo das Problem zu suchen ist ?
Angehängte Dateien:
-

Ohne_Freilauf.jpg
41 KB -

Aktiver_Freilauf.jpg
42 KB
Überlege mal genau was hier bei deinem konzept passiert. In dem moment in dem Deine Freilaufansteuerung kommt, liegt an beiden Motorphasen das gleiche Potential desshalb bleibt dein Motor hängen.
Veruch doch mal die Ansteuerung für High und Low zu vertauschen. Soll heißen High side mit PWM und Low immer an. Dann sind wärend dem Freilauf beide Phasen auf GND. Nur sone Idee. Gruß Carsten (Ich bin auch gerade an dem Thema dran, muss nur gerade eine Zwangspause einlegen, weil mein Oszi tot ist)
Dein Screen Shot ist ziemlich verwirrend, ich habe mal versucht damit klar zu kommen,sehr schwer, weil man nicht durchgängig von jeden Signal sicher den Pegel identifizieren kann. Ich habe mir die Sache noch mal in Ruhe angeschaut. Wenn ich Dein Diagramm richtig interpretiere hast Du auf der Low-Side Deine PWM und schaltest die entsprechend der Drehrichtung gehörende High-Side dazu, ohne PWM. Nun passiert bei Dir hier folgendes: nehmen wir an an WL = PWM ab der ansteigenden Flanke des Ansteuerimpulses liegt an diesem Motoranschluss GND, im gleichen Moment hast du die UH = Motorspannung anliegen, es kann ein Strom fießen von UH über Motorspule über WL, soweit alles in Ordnung. Gehst Du nun aber hin und schaltest die PWM von WL ab und gleichzeitig nach einer kleinen Verzögerung WH ein, hast Du wegen UH das ja in dem Moment noch aufgesteuert ist, folgenden Effect, WH legt an den einen Motoranschluss High Pegel (Motorspannung) im selben zeitlichen Moment wird aber an UH überhaupt nicht reagiert was bedeutet hier liegt auch High Pegel an dem Motoranschluss. Genau das ist der Zustand mit dem ein BLDC Motor gebremst wird. Beim Bremsen wird eine Highside des Motoranschlusses durchgeschaltet und eine andere Highside mit PWM beaufschlagt. Eleganter und auch weicher ist natürlich beide HighSide mit PWM anzusteuern. Du gehst also hin versuchst mit deinem PWM Impuls den Motor zu beschleunigen um Ihn kurz nach diesem Impuls sofort wieder zu bremsen. Das Ergebniss ist Dir bekannt, viel Strom, Endstuffe sehr heiß. Wie tief hast Du dich mit dieser Materie befasst sind Dir die Zusammenhänge klar? Carsten schau Dir mal die Diagramme an, die PWM nach oben bringt auch nichts das Ansteuerschema ändert sich dadurch ja nicht also wird der Motor dann auch nicht drehen.
Ohne die Bilder genauer studiert zu haben: wenn er aber sagt, dass es ohne komplementäres PWM geht, sollte/kann es nicht an der Kommutationsreihenfolge liegen!?
Sorry habe erst jetzt gesehen das auf meinen Beitrag geantwortet wurde. Was ist "aktiver Freilauf": In dem von Eddy genannten Fall gilt: UH = VCC WL = PWM Bei jedem Abschalten der PWM liegt an den Spulen die Selbstinduktionsspannung an. Da die Selbstinduktionsspannung eine umgekehrte Polarität besitzt liegt nun ein Spannungsabfall von ~0.7[V] an der Freilaufdiode von WH an. Dadurch entsteht an dem FET eine Verlustleistung. Da sich die FETs dadurch unnötig erwärmen versucht man das Problem zu umgehen indem man im Augenblick der PWM Abschaltung den WH FET schliesst und damit die interne Diode "kurzschliesst" Da RDS_ON sehr klein ist, ist auch der Spannungsabfall wesentlich kleiner in der Folge entsteht weniger Verlustleistung. Wie man sieht wird die gespeicherte Energie der Spule mit und ohne aktiven Freilauf zwischen den FETs kurzgeschlossen. Der dabei entstehende hohe Strom bleibt somit auch innerhalb der Endstufe und wird nicht in die Versorgungsleitung rückgekoppelt (Somit erklärt dies nicht den von mir gemessenen hohen Strom). Ich bin der Meinung das diese Ansteuerung, entgegen der Auführung von Eddy, nichts mit "aktiven Bremsen" zu tun hat.
Dieser Freilauf soll bewirken, dass der Motor in einer Richtung weiterdrehenn kann, wenner angeschubst wurde, oder?
Die jeweiligen Fets dürfen nur solange durchgesteuert werden, wie auch Strom durch die Freilaufdioden fliesst. Also solange wie die Spannung am Motorterminal U, V oder W größer als die Betriebsspanung ist. Sinn ist ja, die internen Dioden, die bei diesem Strom gut 1Volt verbraten müssen, durch die Fets mit der Absicht zu ersetzen, eben diesen Spannungsabfall auf ein mimum zu reduzieren. Bleiben die Teile nun aber über diese Zeit hinaus eingeschaltet, bremst der Motor, da kurzgeschlossen. BTW. die Abstraktion einer Motordrehung aus den Diagrammen ist wirklich sehr "anspruchsvoll". Mir fiele auf Anhieb aber auch keine bessere Art der Visualisierung ein, als dem Logikanalysator zu bemühen. Axelr.
> "aktiver Freilauf"?
Na bei diesem Thema hast du mit deiner PWM Ansteuerung so ziemlich
daneben gegriffen. Um das, was du hier vorhast sinnvoll umzusetzen,
bedarf es schon ein wenig mehr an Regelelektronik.
Ich sasge nur Vektorsteuerung im Mehrphasensystem, so wie es die großen
Industrieservomotoren auch machen. Mit deiner aktuellen Trapezsteuerunge
kommst du eh nicht weit, außer dass der Motor halt nur ordentlich dreht.
@Axel Rühl Der Witz ist aber doch das auch OHNE aktiven Freilauf d.h. im "normalen" Betrieb die Spule über die Diode entladen wird. Durch Brücken mittels Fet wird dieser Zustand nur optimiert. Mir ist der Unterschied unklar. @Alex R. So ziemlich jeder bessere Modellbau BLDC unterstützt mittlerweile dieses Feature. Ob die dort eine komplexe Vektorsteuerung eingesetzt wird wage ich zu bezweifeln.
Markus schrieb: > @Axel Rühl > Der Witz ist aber doch das auch OHNE aktiven Freilauf d.h. im "normalen" > Betrieb die Spule über die Diode entladen wird. Durch Brücken mittels > Fet wird dieser Zustand nur optimiert. Mir ist der Unterschied unklar. naja, mehr solls doch auch nicht sein, die 0.7-1Volt Spannungsabfall über der Bodydiode sollen durch den Rds_on des Fets ersetzt werden. Wenn 10 Ampere fliessen, müssen (in diesem Moment) 10A x 0.7V = 7Watt über die Diode, jedoch nur 10A x 10A x 0.01R = 1Watt über dem Fet in Wärme umgesetzt und abgeführt werden. Sollte noch mehr hinter "aktiver Freilauf" stecken, so will ich das wissen ;)) Bisher ging ich davon aus, das das alles sei. Viele Grüße Axelr.
So habe ich dass bisher auch verstanden. Trotzten noch zwei Fragen dazu: 1. Wo wird denn dann die Energie verbraten und wo entsteht die Wärme? 2. Man erreicht also nach meinem Versändnis auch keine höhere Akkulaufzeit, weil es ja keine Energie aus dem Akku ist sondern induzierte aus dem Motor? Danke und Gruß Carsten
Carsten H. schrieb: > 2. Man erreicht also nach meinem Versändnis auch keine höhere > Akkulaufzeit, weil es ja keine Energie aus dem Akku ist sondern > induzierte aus dem Motor? Irgendwo muß die Energie herkommen. Die einzige Energiequelle ist der Akku. Solange sich im System kein Perpetuum Mobile versteckt, heizt der Akku die Bodydioden. MfG Klaus
Ja aber wenn man die beiden Versionen untereinander vergleicht, ist es in Beszug auf den Akku das Gleiche - die Energie ist weg! Ohne aktiven Freilauf in Wärme umgewandelt Mit aktiven Freilauf auch irgendwie weg (aber FETs geschont) oder?
Carsten H. schrieb: > Ohne aktiven Freilauf in Wärme umgewandelt > Mit aktiven Freilauf auch irgendwie weg (aber FETs geschont) > > oder? Wie kommt die Energie aus dem System? Entweder als Wärme, egal wo sie entsteht: in den Halbleitern, den Drähten, durch Ummagnetisierung, durch Lagerreibung etc. Oder als mechanische Energie, das ist das was ein Motor leisten soll. Wenn man also die Erwärmung vermindert, erhöht man den Wirkungsgrad. MfG Klaus
Dann würde ich gern wissen, wie das, was sonst in den Dioden der FETs in Wärme umgewandelt wird und verloren geht, im Falle von aktivem Freilauf dem Motor zugute kommt?
Carsten H. schrieb: > Dann würde ich gern wissen, wie das, was sonst in den Dioden der FETs in > Wärme umgewandelt wird und verloren geht, im Falle von aktivem Freilauf > dem Motor zugute kommt? Kann ich dir nicht sagen. Der Motor könnte schneller drehen oder weniger Strom brauchen. Was ich aber sicher weiß, ein Motor wird nicht den Energieerhaltungssatz verletzen. MfG Klaus
Carsten H. schrieb: > Dann würde ich gern wissen, wie das, was sonst in den Dioden der FETs in > Wärme umgewandelt wird und verloren geht, im Falle von aktivem Freilauf > dem Motor zugute kommt? Dem Motor kommt das nicht zugute. Der Sinn des aktiven Freilaufs ist einzig und allein die Verlustleistung an den FETs zu senken. So bleiben sie auch im Teillastbereich kühler. Man kann aber auch "aktiv bremsen" d.h. die gespeicherte Energie aus den Spulen wieder zurück in den Accu leiten. In diesem Fall wird der Motor quasi als Generator missbraucht.
> Dem Motor kommt das nicht zugute. Der Sinn des aktiven Freilaufs ist > einzig und allein die Verlustleistung an den FETs zu senken. So bleiben > sie auch im Teillastbereich kühler. Na endlich einer der mich versteht. Das sehe ich genauso. Aber nochmal zu meiner Frage von oben: Wo wird die Energie nun verbraten?
Carsten H. schrieb: > Aber nochmal zu meiner Frage von oben: Wo wird die Energie nun > verbraten? Die komplette Kurzschlussstrecke d.h. Motorwicklung, Anschlussleitung, FETs, Leiterplatte d.h. jedes Bauteil an dem ein Spannungsabfall vorhanden ist erwärmt sich.
Markus schrieb: > Carsten H. schrieb: >> Aber nochmal zu meiner Frage von oben: Wo wird die Energie nun >> verbraten? > > Die komplette Kurzschlussstrecke d.h. Motorwicklung, Anschlussleitung, > FETs, Leiterplatte d.h. jedes Bauteil an dem ein Spannungsabfall > vorhanden ist erwärmt sich. Und wenn man nun diese Verlustleistung veringern kann so bleibt sie im Akku = höhere Effizienz der Gesamtanlage.
Ja! Aber die kannst du nicht mit "Aktivem Freilauf" verringern! Aber darum ging es hier.
Markus schrieb: > Dem Motor kommt das nicht zugute. Der Sinn des aktiven Freilaufs ist > einzig und allein die Verlustleistung an den FETs zu senken. So bleiben > sie auch im Teillastbereich kühler. Wenn nicht dem Motor, dann dem Akku. Es gilt der Energieerhaltungssatz Markus schrieb: > Man kann aber auch "aktiv bremsen" d.h. die gespeicherte Energie aus den > Spulen wieder zurück in den Accu leiten. In diesem Fall wird der Motor > quasi als Generator missbraucht. Was heißt missbraucht? Ein Motor ist immer auch ein Generator. Wenn ich die Rotationsenergie abbauen will (also bremsen), muß ich sie in eine andere Energieform transformieren. Entweder in Wärme und die Bremsscheiben zum glühen bringen, oder in elektrische Energie und zurück in den Akku oder wie früher bei der Bahn in die Wagonheizung. MfG Klaus
Carsten H. schrieb: > Ja! Aber die kannst du nicht mit "Aktivem Freilauf" verringern! > Aber darum ging es hier. Dann erklär mir mal, wo die Energie, die die FETs geheizt hat jetzt hingeht, wenn aus dem Akku die gleiche Energie entnommen wird und der Motor nicht mehr leistet. MfG Klaus
Klaus schrieb: > Wenn nicht dem Motor, dann dem Akku. Es gilt der Energieerhaltungssatz Nö die Spannung der Spulen wird zwischen den Spulen durch die FETs kurzgeschlossen. Der Accu wird dadurch nicht geladen. Die Energie der Spule wird nur in Wärme gewandelt. > Was heißt missbraucht? Ein Motor ist immer auch ein Generator. Wenn ich > die Rotationsenergie abbauen will (also bremsen), muß ich sie in eine > andere Energieform transformieren. Entweder in Wärme und die > Bremsscheiben zum glühen bringen, oder in elektrische Energie und zurück > in den Akku oder wie früher bei der Bahn in die Wagonheizung. Korrekt aber das geht nicht indem du die H-Brücken nach dem obigen Schema ansteuerst. Das hat nichts mit "aktiven Freilauf" zu tun.
Klaus schrieb: > Dann erklär mir mal, wo die Energie, die die FETs geheizt hat jetzt > hingeht, wenn aus dem Akku die gleiche Energie entnommen wird und der > Motor nicht mehr leistet. Die Energie teilt sich in Form von Verlustleitung über alle übrigen Komponenten auf. Nur am FET bleibt halt weniger über.
Markus schrieb: > Nö die Spannung der Spulen wird zwischen den Spulen durch die FETs > kurzgeschlossen. Der Accu wird dadurch nicht geladen. Die Energie der > Spule wird nur in Wärme gewandelt. Und je geringer der Widerstand des Stromkreise, desto weniger Wärme und desto länger bleibt der Strom hoch. Und desto weniger muß nachgeliefert werden, wenn die Brücke wieder eingeschaltet wird. Das lädt den Akku nicht auf, entlastet ihn aber. Markus schrieb: > Korrekt aber das geht nicht indem du die H-Brücken nach dem obigen > Schema ansteuerst. Das hat nichts mit "aktiven Freilauf" zu tun. Hab ich das behauptet? Wer hat "aktiv bremsen" hier eingeführt? MfG Klaus
Angehängte Dateien:
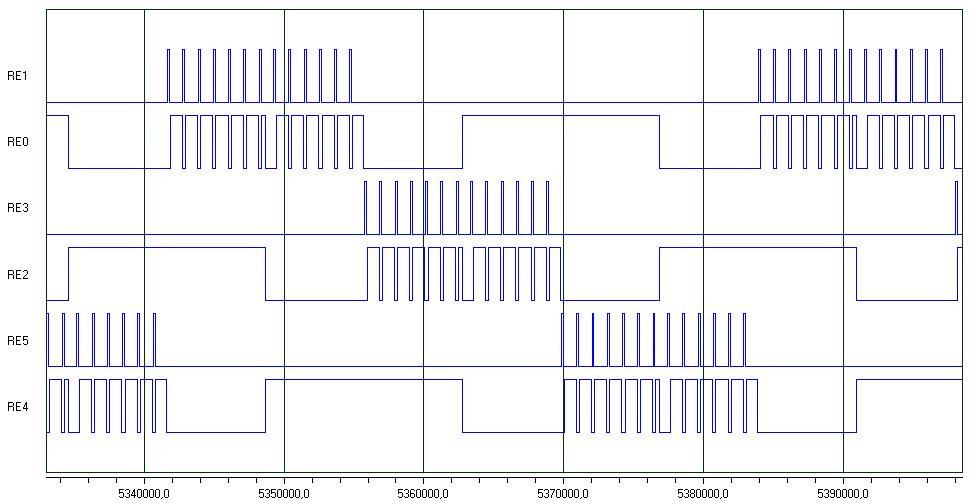
Markus, um auf deine eigentliche Frage nach dem PWM Schema
zurückzukommen, meine Ansteuerung sieht so aus ...
(mit kleinen Macken, wie ich gerade sehe, das kann aber auch der Logic
Analsyser sein)
> Totzeit von 5[us] zwischen den Umschaltzeitpunkten
Das scheint mir ziemlich viel, im Datenblatt meiner FETs steht was von
30-60 ns!?
@Klaus Das sind wir uns ja weitesgehend einig. @Carsten Die Ansteuerung deckt sich ja quasi mit meinem ersten Bild :) Erzeugst du das invertierte PWM Signal per SW oder HW ? Je kürzer ich die Totzeit wähle desto höher wird in meiner Schaltung auch die Stromaufnahme. Mit 5[us] hat es "einigermaßen" funktioniert. Aber ich gebe dir Recht die 5[us] sind eigentlich viel zu viel. Da die FETs in meiner Schaltung direkt vom AVR angesteuert werden ist möglicherweise der benötigte Strom zu hoch um den FET schnell genug umzuschalten ?
Geplant war die Hardware zu nutzen. Dazu habe ich mir einen dafür gut geeigneten (wie ich glaubte) Controller ausgesucht (dsPIC30F2020), der dazu auch noch bei Reich… für gutes Geld zu haben war. Hätte auch soweit funktioniert. Aber um das PWM Modul zu benutzen muss der PLL aktiviert werden. Allerdings dann wird das Teil heiß ohne Ende und zieht zwischen 200 und 300 mA. Wie ich jetzt weiß ist es „alte“ oder nicht die neueste Technologie, wie Microchip bestätigt. Kurzum ich mache nun alles in Software und fühle mich dabei nicht schlecht. Glaube sogar eine höhere Flexibilität zu haben. > Da die FETs in meiner Schaltung direkt vom AVR angesteuert werden ist > möglicherweise der benötigte Strom zu hoch um den FET schnell genug umzuschalten Das solltest du überprüfen. Ich kann mir schwer vorstellen, dass der Ausgang das direkt kann. Vielleicht sind die FETs ja nicht völlig durchgeschaltet? Werden die Teile denn sehr warm? Mit welcher Spannung läuft dein AVR? Mir ist noch aufgefallen, dass in deinem obigen Bild „Aktiver Freilauf“ die duty cylce der Phasen z.B. WH und WL in den Bereichen A-B und D-E genau invertiert sind. Soll das so sein? Wenn ja was macht das für ein Sinn?
Carsten H. schrieb: > Das solltest du überprüfen. Ich kann mir schwer vorstellen, dass der > Ausgang das direkt kann. Vielleicht sind die FETs ja nicht völlig > durchgeschaltet? Werden die Teile denn sehr warm? Mit welcher Spannung > läuft dein AVR? Ja das kann durchaus sein wobei die FETs nur handwarm werden. Es sind übrigends FDS6679 (über eine Transistor Vorstufe geschaltet) und IRF7832 (über 33R direkt am AVR). Der AVR läuft mit 5[V]. > Mir ist noch aufgefallen, dass in deinem obigen Bild „Aktiver Freilauf“ > die duty cylce der Phasen z.B. WH und WL in den Bereichen A-B und D-E > genau invertiert sind. Soll das so sein? Wenn ja was macht das für ein > Sinn? Ja das sollte so sein. Die Idee dahinter war das die Verlustleistung ohne "aktiven Freilauf" gleichmäßig über alle Dioden verteilt wird. Durch den "aktiven Freilauf" ist das eigentlich hinfällig aber ich habe die Ansteuerung nicht mehr verändert. Siehst du da irgendwelche Problem ?
> Es sind übrigends FDS6679 (über eine Transistor Vorstufe geschaltet) und IRF7832 > (über 33R direkt am AVR). Der AVR läuft mit 5[V]. Ich habe FDD6637 als low side FETs und IRLR7843 für die high side. Das gleiche Prinzip bei mir. Low sid direkt angesteuert und die high side über einen Transistor. Ich frage mich, warum man das so macht (die Hardware ist nicht von mir entwickelt)? Ist das nur um die Schaltlogik der high side FETs anzupassen oder gibt es dafür Spannungs- Stromtechnische Gründe? Wenn es nämlich nur wegen der Logik ist, könnte ich es demnächst weglassen, denn das kann ich locker mit der Software realisieren. > Siehst du da irgendwelche Problem? Ich hatte erst gedacht, dass du so in den einzelnen Phasen mit unterschiedlichen duty cylces fährst. Da du aber dann auch den Gegenpol von low auf high änderst sollte das so funzen. @all Ander Frage: Was habt ihr für eine Anfahrstrategie? Ich frage, weil ich den Motor zwar jedesmal relativ sicher anfahren kann, aber scheinbar die Kommutierung nicht zum Drehfeld passt und der Controller dann auch keine zero crossings sieht. Wenn ich den Motor leicht abbremse werden die Signale besser. Aber ich kann natürlich nicht jedesmal manuell eingreifen :-) Wie kann ich verhindern, dass der Motor in einen solchen falschen Takt gerät? Zuerst spanne ich den Motor ein, indem ich zwei Phasen bestrome (z.B. UH und VH high – WL auf Massse). Dann eine Phase ausschalten (hier UH). Somit sollte der Rotor auf VH-WL stehen. Dann setzt die Zwangskommutierung mit schneller werdende Intervallen ein, bis eine mechanische Umdrehung getan ist. In der Zeit sollte, so hoffe ich, der Controller dann die ersten ZC sehen. Gruß
Carsten H. schrieb: > könnte ich es demnächst > weglassen, wenn Motor und µC aus der gleichen Spannungsquelle gespeist werden - im Prinzip ja.
> wenn Motor und µC aus der gleichen Spannungsquelle gespeist werden - im > Prinzip ja. Warum? Damit beide die gleiche Masse haben? Wenn das der Grund ist, dann denke ich diese Voraussetzung ist bei mir gegeben. Der Motor hängt direkt am Akku und der µC über einen Spannungsregler auch.
Ich wär fast dafür, das alle, die hier posten wollen, erstmal die Artikelsammlung auf der linken Seite mit den Grundlagen durcharbeiten. Dein µC läuft mit 3.3Volt (gut, ja ok. mit 5V), dein Motor mit 12V (Beispielsweise). Wann sperrt dein PMOS, wenn Du ihn direkt an den µC anschliessen würdest? Wenn der µC HighPegel oder Low-Pegel "wirft"? Axelr.
Du scheinst ja ein Schlaumeier zu sein. Aber weißt du was, wenn du keine Lust hast jemanden was zu erklären, dann behalte deine Weisheiten doch für dich. Danke und Gruß.
Beitrag "Re: BLDC Motoren Steuerung" Ok. nochmal, lassen wir den ersten Satz weg und das andere stehen Dein µC läuft mit 3.3Volt (gut, ja ok. mit 5V), dein Motor mit 12V (Beispielsweise). Wann sperrt dein PMOS, wenn Du ihn direkt an den µC anschliessen würdest? Wenn der µC HighPegel oder Low-Pegel "wirft"? Für den P-Kanal MOSFET sind die (angenommenen) 12V Motorspannung sein Bezugspotenzial. Um diesen zu sperren, braucxhst Du U_gs < U_gs_th, also weniger als 2Volt oder sowas, am besten NUll Volt. ABER gegen Source des PMOSFET gemessen, nicht gegen GND. Es heisst ja im Datenblatt U_gs und nicht U_ggnd. Du bekommst aber keine NUllVolt gegen 12V, wenn der Controller nur mit 5V läuft. so bekommst Du -7 Volt, wenn der Controller HIGH Pegel ausgibt und (fast) -12V, wenn der Controller LOW Pegel ausgibt. Da sperrt kein PMOSFET! Du brauchst 12Volt (bzw. Motorbetriebsspannung), um den P-CH zu perren und 12Volt minus 5V (bei Logiklevel FET) bzw. minus 10V, um den PFET durchzusteuern. Der Widerstand über Gate source sorgt im nicht angesteuerten Zustand des "kleinen" NPN Transistors dafür, das der PFET sicher sperrt. (source und Gate sind über diesen Widerstand quasi verbunden, Strom fliesst keiner, also fällt da auch keine Spannung ab --> U_gs == NUll Volt. wird der steuertransistor mit Basistrom versorgt (high-Pegel am portpin, BVasisvorwiderstand usw.) leitet der npn steuertransistor und die Spannung am Gate des PFET fällt. Gegen 12Volt gemessen , unter die im Datenblatt garantierten Ugs_th, und der PFET fängt an zu leiten. Man sieht, ohne Steuertransistor gehts nicht. Schlauschiss Axelr.
Ok got it! Denke ich.
Und da der N-Channel FET (hier IRLR7843) GND als Bezugspotential hat und
U_gs_th laut Datenblatt max 2,3 V sein kann, könnte ich den FET locker
auch mit einem 3,3V betriebenen µC steuern? Im Moment läuft der
controller mit 5 Volt.
> Schlauschiss Axelr.
Kunststück, wenn man es studiert hat!
Danke.
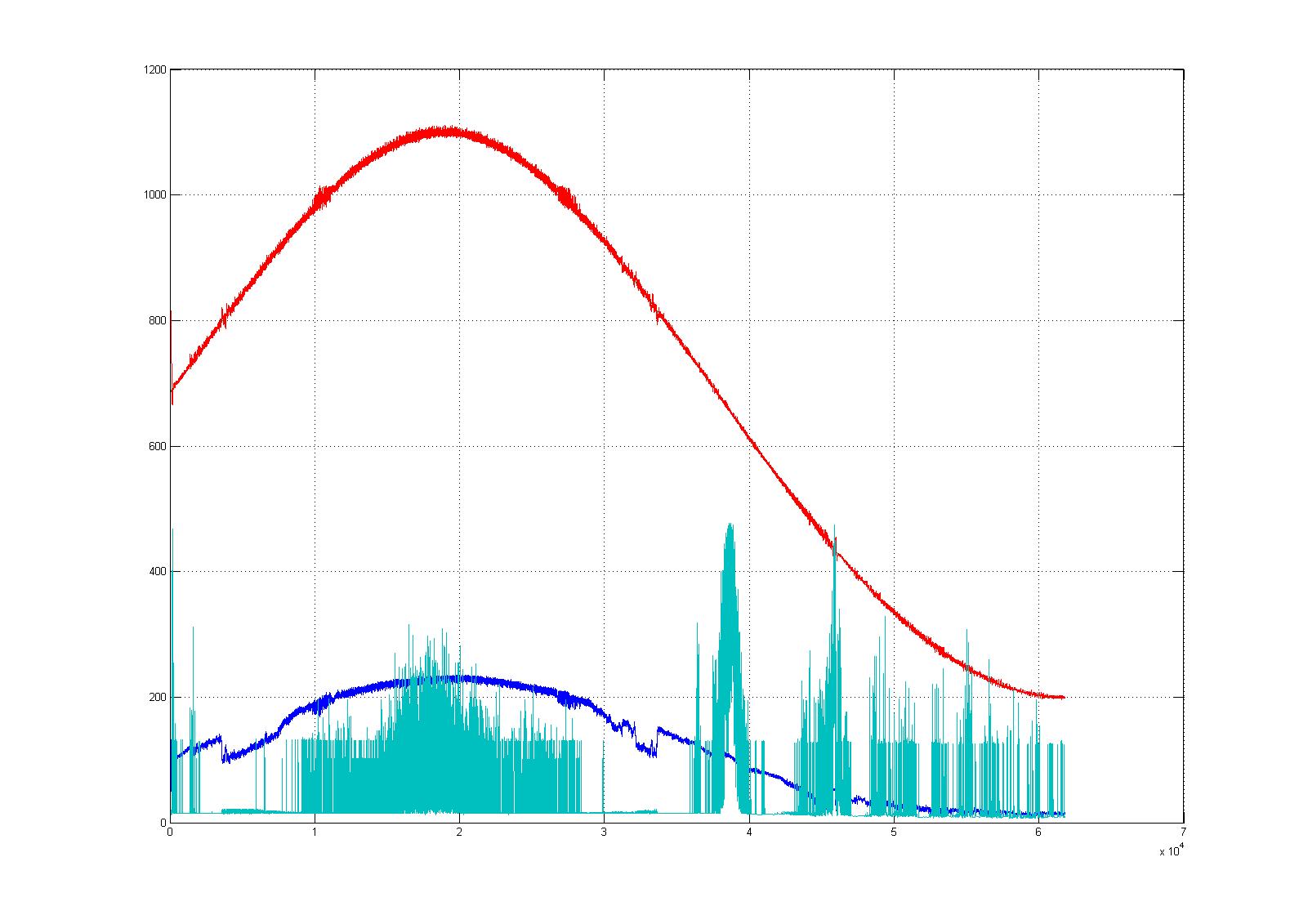
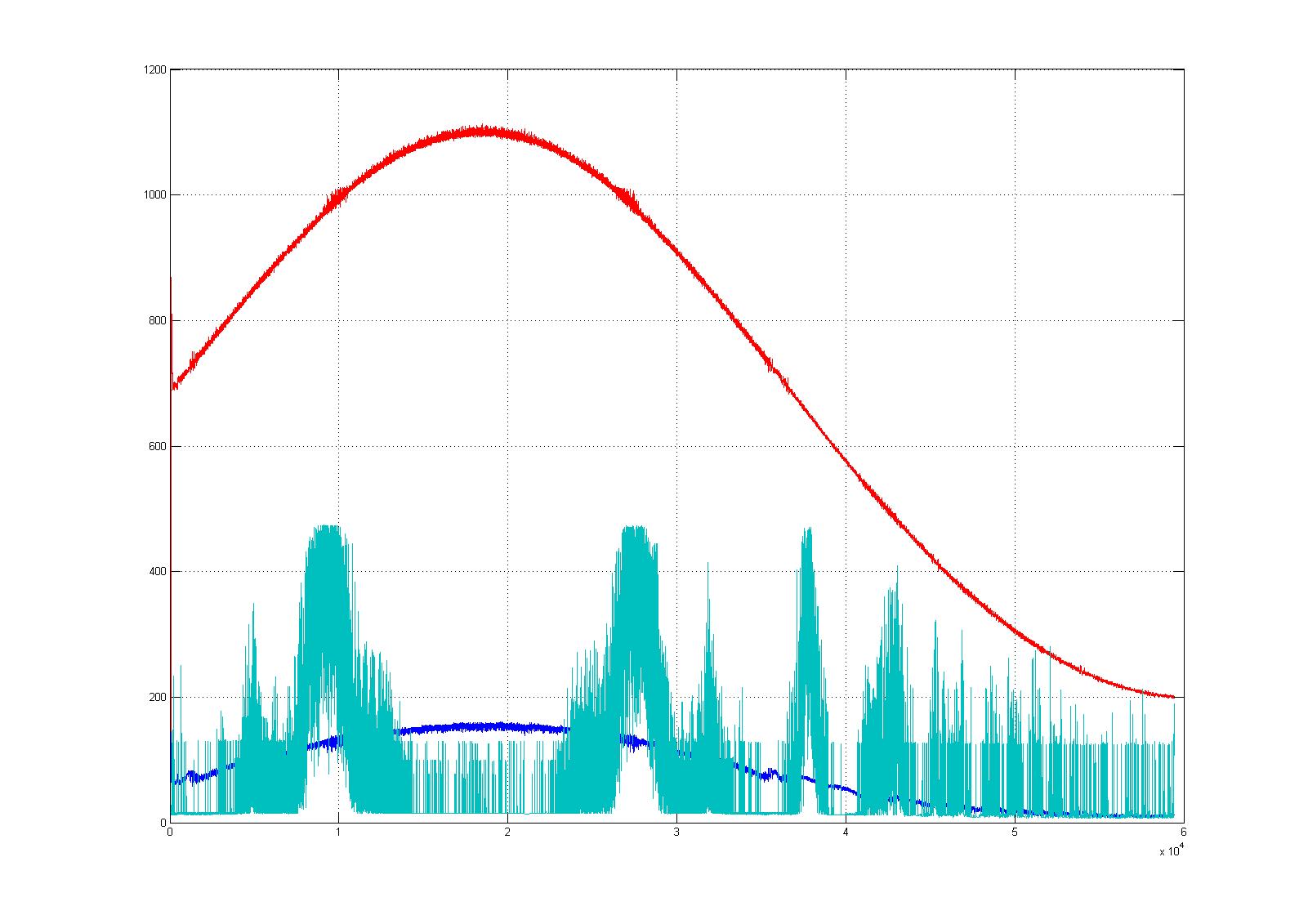
Auch wenn meine nachfolgende Frage nicht im Zusammenhang mit dem aktiven Freilauf steht so habe ich jetzt ein Phänomen was ich mir nicht erklären kann. Dazu wieder zwei Plots. rot = Drehzahl [RPS] blau = Aktueller PWM Duty Cycle türkis = Spannung an einem Low Side FET. Dieser ist zu diesem Zeitpunkt durchgeschaltet. Die Messung erfolgt unmittelbar bevor die PWM den FET wieder deaktiviert. D.h. es wird die aktuelle Spannung über RDS_ON gemessen. Bild 1: Hier beträgt die PWM Frequenz 8kHz Frage : Wie ist der Peak zum Zeitpunkt 3.8 zu deuten ? Bild 2: Hier beträgt die PWM Frequenz 12kHz Frage : Warum ist hier zusätzlich ein Peak zum Zeitpunkt 2.8 erkennbar ? Wenn ich RDS_ON als konstant annehme so entspricht der Wert "400" auf der Ordinatenachse einem Strom von ~100[A]. Die Stromaufnahme des kompletten Regler beträgt jedoch nur ~3[A]. Kann es evt sein das die Motorspule zu den genannten Zeitpunkten in Resonanz gerät ? Meine ursprüngliche Idee war über den ermittelten Strom eine Überlastabschaltung zu implementieren. D.h. wenn Gesamtstrom > 5[A] -> Motor Stop. Aufgrund der riesigen Spikes erscheint das aber etas "schwierig" ?!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.