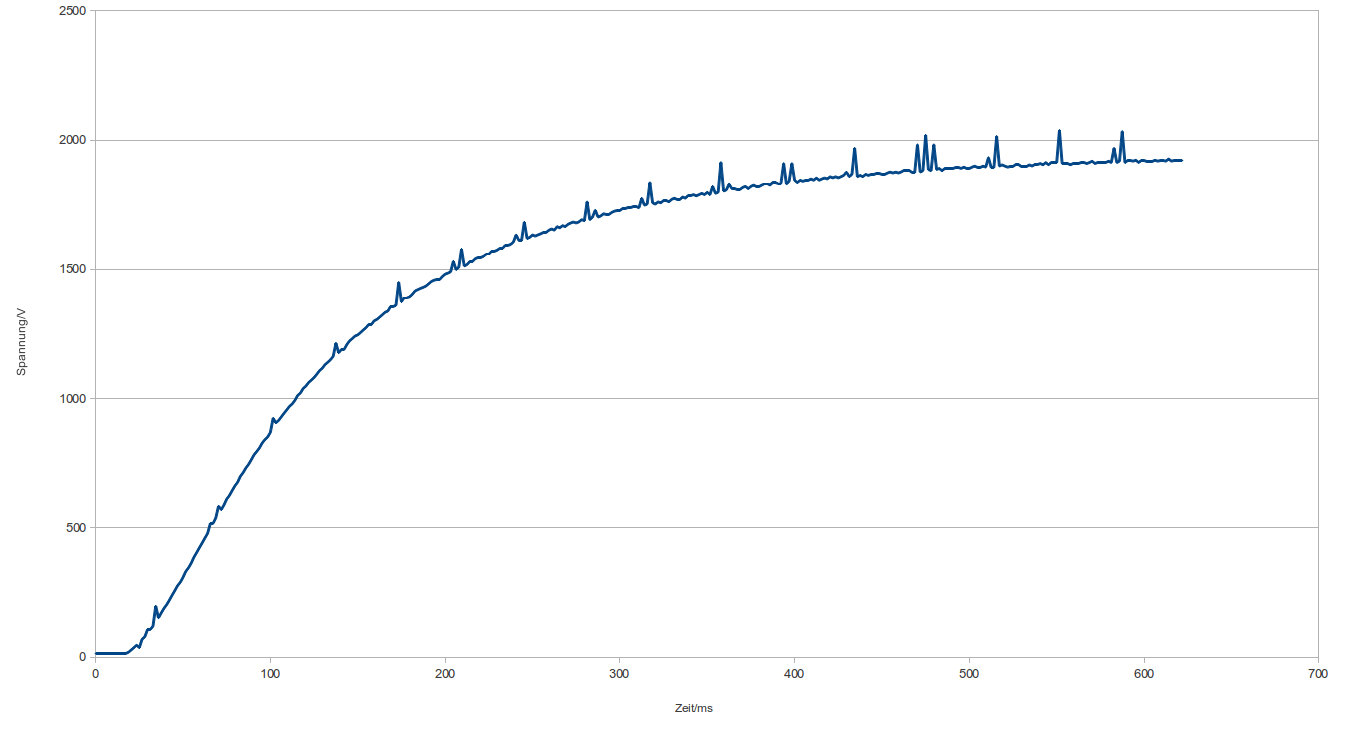
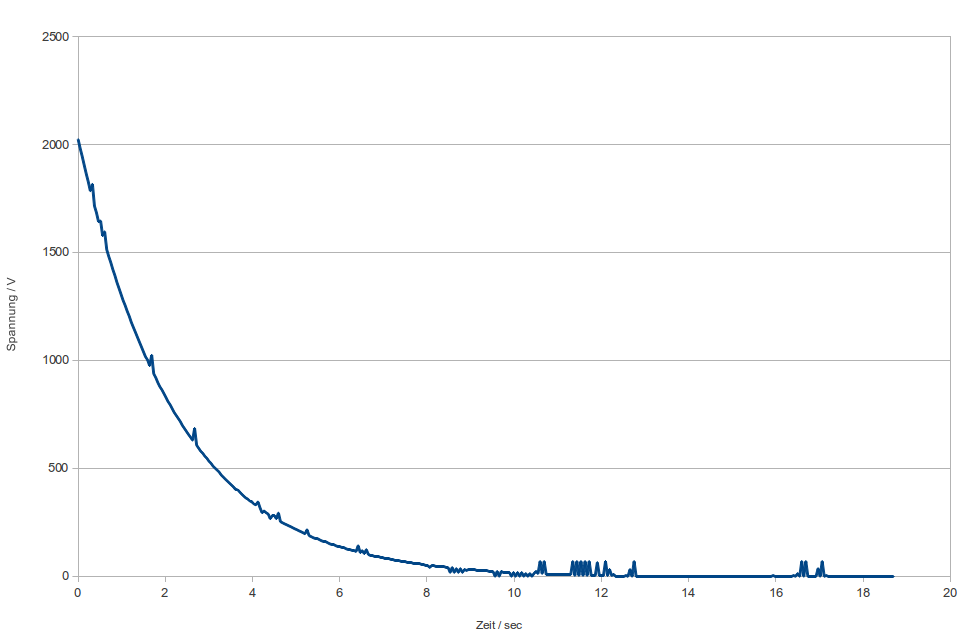
Hallo Leute, obwohl ich ein Semester Grundlagen der Regelungstechnik hatte und auch erfolgreich bestanden habe sehe ich mich nicht in der Lage einen Regler in einem µC zu dimensionieren. Es geht darum eine Spannung 0..2.5kV über eine PWM (Steuerbereich 0..65535) zu regeln. Der Regler soll nach Möglichkeit ohne Überschwinger ans Ziel kommen, also asymptotischer Grenzfall war das glaube ich. Ich habe es zuerst mit Bestimmung der Reglelparameter nach Ziegler-Nichols probiert, also auf Basis der Sprungantwort. Der Regler war instabil und am schwingen. Dann habe ich herausgefunden, dass die Sprungantwort stark davon abhängig ist ob ich einen positiven oder einen negativen Sprung mache. Im Anhang sind die beiden Bilder, die ich dazu aufgenommen habe (man beachte die krassen Unterschiede in der Zeitachse!). Kann man einen Regler der so unterschiedliches Verhalten hat überhaupt so ohne Weiteres dimensionieren oder müsste ich da anders ran gehen?
Angehängte Dateien:
-

Sprungantwort-0-50000.png
37 KB -

Sprungantwort-50000-0.png
24 KB
da braucht's einen nichtlinearen Regler, der zumindest für positiv/negativ unterschiedliche Koeffizienten hat. Für solch ein System können dann die klassischen Entwurfsverfahren erst verwendet werden, nachdem die Strecke abschnittsweise linearisiert wurde ... Gruss
Also das mit unterschiedlichen Reglern für positiv und negativ leuchtet ein. Aber was soll er denn da linearisieren? und wie?
Ahh ok, sowas hatte ich mir schon gedacht. Also wenn ich jetzt zwei Regler nehme in Abhängigkeit davon ob ich gerade nach oben oder nach unten will, wie dimensioniere ich denn den für den Weg nach unten? Ziegler Nichols funktioniert da ja nicht direkt, weil das ne e-Funktion ist, da gibts keinen Wendepunkt und auch keine Totzeit. Alleine wenn ich die Totzeit zu 0 annehme lösen sich alle Formeln in Luft auf, weil ich durch diese Zeit teile :P
na, nun sieht das ja fast nach einem System erster Ordnung aus. Nach Vorlesung: Was kommt da für ein Regler in Frage ?! Wenn man einen geschlossen Reglerentwurf durchführen möchte, dann geht das bei nichtlinearen Strecken sehr schwer. Um das zu vereinfachen, linearisiert man die Sprungantwort abschnittsweise und führt entsprechend abschnittsweise den Entwurf durch. Die gefundenen Parameter gelten dann in den jeweiligen Abschnitten. Man muss sich nur noch einige Tricks zum Umschalten der Parameter einfallen lassen (der Einfachste ist hier z.B. mit dem Vorzeichen von e die Parameter umzuschalten) ...
Regeltechniker schrieb: > na, nun sieht das ja fast nach einem System erster Ordnung aus. Nach > Vorlesung: Was kommt da für ein Regler in Frage ?! System 1. Ordnung? Bei nem negativen Sprung vielleicht, beim positiven entspricht das System ja wohl eher einem PT2-Glied. Wie auch immer, das klingt alles viel zu kompliziert. Entweder wird meine linear angenäherte Ein/Ausgangskennlinie des Systems reichen müssen oder ich hau da noch nen 2-Punkt Regler rein :P Der lief bislang am besten, hat kein Fehler gehabt, war nur extrem langsam.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.