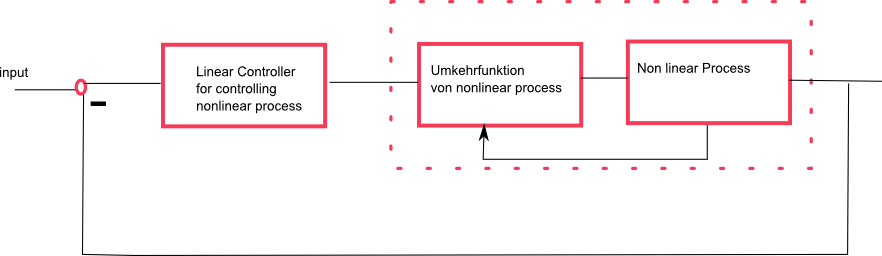
Hallo, habe eine Frage zur Feedback Linearisierung. Angehängt folgendes Modell, dass wir in der Vorlesung besprochen haben. Mein Aufassung: 1.) Das nichtlineare modell wird mit seiner Umkehrfunktion multipliziert --> Daraus wird dann ein lineares modell? 2.) dieses Lineare Modell kann mit einem Linearen Regler geregelt werden. 3.) Was wird vom Nonlinear Process auf die Umkehrfunktion zurückgeführt? greez
Angehängte Dateien:
-

text4459.png
15 KB
Dan Kübel schrieb: > Was wird vom Nonlinear Process auf die Umkehrfunktion zurückgeführt? Der Ausgang von "Nonlinear Process" ist der Ist-Wert, der wird vom Sollwert subtrahiert und die Differenz geht auf den Regler. Der Reglerausgang (Stellwert) wird dann mit der Umkehrfunktion verrechnet. Für den Regler ist die Regelstrecke also die Reihenschaltung aus Umkehrfunktion und "Nonlinear Process", so dass die Regelstrecke aus Sicht des Reglers eine lineare Funktion ist.
Ein NTC zB bildet die Temperaturauf eine Exponentialfunktion ab. Wenn man die im Linearisierungsprozess mit einem Logarithmus verrechnet erhaelt man eine lineare (zeitunabhaengige) Funktion. Was anderes ist wenn die DGL nichtlinear ist, denn dann ist die Zeit nicht linear.
Dan Kübel wollte wohl wissen, wozu diese LOKALE Rückführung zwischen nichtlinearem Prozess und nichtlinearer Funktion gut sein soll.
NoPoP schrieb: > Dan Kübel wollte wohl wissen, wozu diese LOKALE Rückführung zwischen > nichtlinearem Prozess und nichtlinearer Funktion gut sein soll. Das sollte er denjenigen Fragen, der das Bild gemalt hat. Vermutlich irgendwelche Parameter oder Messgrößen. Bei nichtlinearen Prozessen ändern sich oft irgendwelche Eigenschaften bei unterschiedlichen Betriebsbedingungen; das muss dann in der Umkehrfunktion berücksichtigt und nachgeführt werden (Stichwort "zeitvariante systeme").
Angehängte Dateien:
-

text4459.png
14 KB
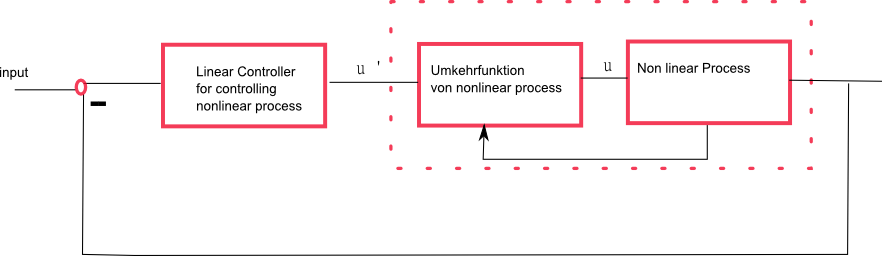
Hi, also erstmal danke für die ganzen Antworten. nehmen wir an, der Ausgang des Non-linear process hat als ausgang die Geschwindigkeit v. Ich habe das Bild aus unserem Skript abgezeichnet. der Linear Controller sieht den Eingang u'. Der Nonlinear Process hat den EIngang u. Wie hängen oder wie verknüpf ich u und u'???
Jetzt nochmal auf Deutsch: Ich habe das Bild selber gezeichnet, und jetzt noch die Eingänge u' der Umkehrfunktion und u des NOnlinear Process eingezeichnet. Meine Frage ist im Endeffekt, wie hängen u und u' zusammen, das daraus eine lineare Übertragungsfunktion werden kann?
um diese "Umkehrfunktion" berechnen zu können, braucht man die Zustände des Systems, da dieses dynamisches Verhalten aufweisen kann. Dein Material scheint ziemlich schwammig zu sein. aber koogle findet das und es scheint unter 4.3 ganz gut beschrieben zu sein: http://www.scribd.com/doc/57533878/13/Exakte-Linearisierung für das Lineare System lässt sich dann wie gewohnt ein Regler entwerfen. Wer einen Zustandsregler möchte, muss die Zustände aus dem System zurückführen und sie in ihre äquivalenten linearen Zustände zurückrechnen. btw: die entsprechenden Formeln sollte dein Skript auch hergeben :P
Hi A.S., ich finds hier echt cool, zu egal welchem Themengebiet gibt es hier immer profis, die einem tips geben !! p.s. Ich frage, weil in meinem Skript nur folgendes erklärt ist. Nonlinear Process ist eine nicht lineare Funktion mit dem EIngang u. Dann wird nach u aufgelöst und u' eingeführt... -->the resulting dynamics become m*dv/dt=u'+d (d unknown disturbance) so ungefähr steht das drin, keine allgemeine Regel oder so...
allgemein ist der Prozess ein dynamisches System: x_dot = f(x,t) + g(x,t)*u "nonlinear process" x_dot ist die Zeitableitung der Zustände x das Ding heißt eingangsaffin, da u als Faktor auftritt. Bei noch allgemeineren Systemen wird's deutlich schwieriger. Wenn du jetzt, beispielsweise im eindimensionalen Fall u = (u' - f(x,t))/g(x,t) "Umkehrfunktion" wählst, wird das System linear: x_dot = u' wenn x ein Vektor ist, wird's etwas komplizierter. Aber das Grundprinzip sollte ganz gut rüber kommen. Bitte bei Gelegenheit bei der zuständigen Person übers Skript beschweren ;)
Hi As, ok....ich denke, so kann ich damit leben.....danke......die Beschwerde geb ich lieber nicht ab, da profs so nachtragend sind... :-)
Hi, Ich muss jetzt doch nochmal nachhaken... A. S. schrieb: > Wenn du jetzt, beispielsweise im eindimensionalen Fall > > u = (u' - f(x,t))/g(x,t) "Umkehrfunktion" > > wählst, wird das System linear: > x_dot = u' Ich verstehe die Verbindung zwischen u' (Eingang in die Umkehrfunktion) und der Zustandsvariablen x_dot nicht. bzw. diese Vorgehensweise gilt, wenn ich alle Parameter eines Systems kenne. Wenn ich parameter, die von "außen" auf das System wirken,berücksichtigen will. Kann ich diese Parameter dann als Störung (disturbance d) aufnehmen? sprich x_dot=u'+d (unknown disturbance) gruß
du sprichst zwei Sachen an 1. Parameter der Strecke (f und g): Wenn die nicht bekannt oder zeitvariant sind, kann die Linearisierung auch nur dementsprechend mies arbeiten. Möglicherweise hilft dann ein adaptiver Algorithmus, das seine eigenen Parameter den Parametern der Strecke anpasst. Damit hab ich mich aber im Zusammenhang mit Linearisierung noch nicht beschäftigt. 2. Störungen (d): Störungen wirken auf Signale des Systems. Meistens auf Ausgänge oder auf Zustände. Wenn du den Ort des Störungseingriffs (in den Gleichungen) bestimmen kannst, sind wir schonmal ein Stück weiter. Grundsätzlich gilt, dass die reine Linearisierung Störungen wegbekommt, wenn du die betroffenen Zustände messen kannst und somit die Störung über die Messung mitberücksichtigen kannst. Sind die Störungen erst am Ausgang sichtbar oder wirken sie sich schon auf den Systemeingang aus, klappt das nicht. Aber du hast ja noch die vorgeschaltete Regelung. Wichtig wär also erstmal, deine Unsicherheiten zu konkretisieren. Kennst du Parameter der Strecke nicht genau? wie schwerkraft, masse, ... oder hast du zusätzliche Terme in den Gleichungen? Manchmal kann man tatsächlich beides ineinander umformen. bin aber jetzt auch nicht so wirklich drin in der Materie der Störungen. Da hab ich bisher ganz wenig gemacht...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.