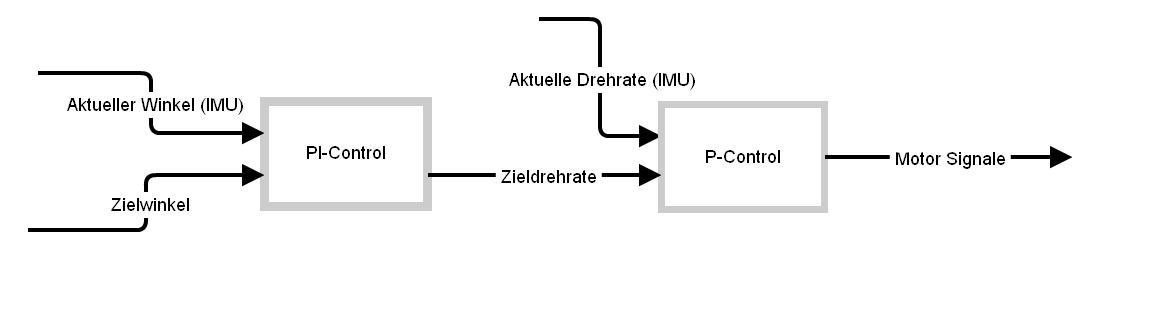
> Ich habe ne Frage zur Lagereglung des QuadCopters
Die, die du anhängst, ist primitiv,
man könnte auch sagen naiv.
Für eine richtige Regelung ist erheblich mehr notwendig,
weil die drehenden Propeller wie Kreisel wirken, sich
also eine Rotation auch auf andere Achsen auswirkt.
Richtige Hubschrauberlageregelungen rechnen daher
mehrdimensionale partielle numerische Differentalgleichungen
aus, um Störgrösse, Effekt der Korrektur, und Korrektur auf
den Korrekturfaktor abbilden zu können.
Schliesslich will man Kamerabilder, und keine Zitterparie.