Hallo, ich habe als Neuling eine erste Frage: Wenn ich meinen Schrittmotor mit der L298/L297 (z.B. http://www.rn-wissen.de/index.php/Schrittmotoren) ansteuere, hält er problemlos bei Stillstand eine daran hängende Last. Sobald ich aber einen Schritt weiter pulse, kann der Motor die Last nicht mehr halten und fällt ab. Was muss ich ändern? Danke.
Das Drehmoment, d.h. den Spulenstrom. Beim Steppen muß er schließlich zusätzlich zum statischen Drehmomenten noch das dynamische zum Überwinden der Trägheitskraft aufbringen. mfg Michael
-- -- schrieb: >> Was muss ich ändern? > Das Drehmoment, d.h. den Spulenstrom. Wobei du prinzipiell mal nachrechnen solltest, ob der Motor überhaupt ausreichend groß dimensioniert ist...
Das Feld muss auch richtig einsetzen, damit nicht das Haltemoment überwunden wird und der Motor zurückrutscht. Das passiert aus unerklärlichen Gründen immer mal wieder.
Erforderliches Drehmoment ausrechnen ist nicht so einfach. Du müsstest die Resonanzfrequenzen und die dabei auftretenden Beschleunigungskräfte berechnen. Besser kräftig überdimensionierte Motoren kaufen. Falls du billige Pollin-Motoren benutzt - erst mal richtige 1,8 Grad 2 Ampere CNC Motoren kaufen. Die bringen bei gleicher Stromstärke so etwa das 10-fache Drehmoment. 2 Ampere Motoren durch 8 Ampere Motoren ersetzen wird mit dem L298 natürlich nicht mehr so einfach... Anderer Ansatz: Mehr Drehmoment auf Kosten der Geschwindigkeit. Getriebe, Gewindestange oder ähnliches. Hat aber auch seine Grenzen. Billige Motoren haben nicht mal für Staub auf einer Gewindestange genug Drehmoment.
Hallo Edgar! > Das Feld muss auch richtig einsetzen, damit nicht das Haltemoment > überwunden wird und der Motor zurückrutscht. Das passiert aus > unerklärlichen Gründen immer mal wieder. Bei einem einzelnen Schritt aus dem Stand hat man da nicht so viele Möglichkeiten. Oder ist mir da in den letzten 15 Jahren, in denen ich mit Schrittmotoren beschäftige, etwas entgangen? ;) Mit freundlichen Grüßen Thorsten Ostermann
> Oder ist mir da in den letzten 15 Jahren, in denen ich > mit Schrittmotoren beschäftige, etwas entgangen? ;) Der Motor der OP war ja schon bestromt, um das Haltemoment aufzubringen, also weiß man auf welchen Phasen Strom ist. Mit Mikroschritt hätte er sicher auch ausreichend langsam anfahren können. Es spricht ja nicht mal was dagegen, in der kurzen Beschleunigungsphase mal eben den 1.5-fachen Strom durchzuschicken den der Motor laut Spezifikation verträgt, um eben das Drehmoment kurz auszureizen, heiss wird er ja nicht in der kurzen Zeit.
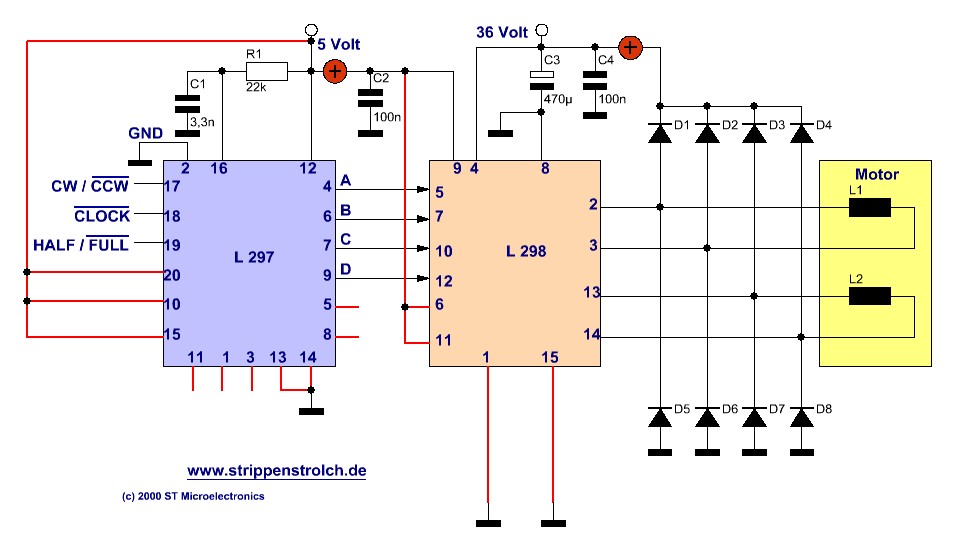
Ich hätte nochmals kurz eine andere Frage: Nach ein bisschen Googlearbeit habe ich folgendes gefunden: http://www.strippenstrolch.de/grafiken/schritmot-treiber10.jpg Was sagt ihr dazu, dass Vref und Osz an 5V sind? Das Fliflop muss ja ständig was anderes melden, bei 5V an R und S? http://www.datasheetcatalog.org/datasheet2/c/0g0gh362kxwx30o7xi4x2i4jzffy.pdf Danke.
{kind=link}
Das steht doch im Datenblatt: Vref sollte max. 3V sein, OSC legt man auf GND wenn man den internen Oszillator nicht verwenden will und statt dessen das Signal über Syn einspeisen will. Osz liegt hier auch nicht auf 5V, sondern ist mit dem üblichen RC-Glied beschaltet. Für eine Stromregelung fehlen hier außerdem die Sense-Widerstände. Da kann man sich das RC-Glied auch gleich sparen... Mit freundlichen Grüßen Thorsten Ostermann
D.h. Vref auf 5V ist falsch und kann zu Problemen mit der Schaltung führen? Dann würde ich Vref einfach auf GND legen. Osc bleibt dann im RC-Glied und steuert das Flipflop.
Ja. Aber wie gesagt, ohne die Widerstände zur Strommessung kannst du dir den Takt vom Flipflop auch sparen. Mit freundlichen Grüßen Thorsten Ostermann
Gut aber, wenn ich das RC-Glied weglasse, hängt ja S des Flipflop "in der Luft". Es wäre also sinnvoll Sync auf 5V zulegen? So ist der Ausgang Q immer auf high. Danke für die Antwort.
Der OSC-Eingang wird nach Datenblatt auf GND gelegt, wenn der interne Oszillator nicht verwendet werden soll. Ich wundere mich nur, dass du unbedingt eine Schaltung ohne Stromregelung aufbauen willst. Hast du einen antiken Motor mit 12V Nennspannung? Im allgemeinen liefern Motoren bei höherer Versorgungsspannung deutlich mehr Dynamik. Das geht aber nur mit Stromregelung. Mit freundlichen Grüßen Thorsten Ostermann
Habe nur momentan die passenden Widerstände nicht da und bin gerade am Spielen..... Dann: Osz auf GND und Sync auf 5V, Vref auch auf GND....?
Ich würde Sync über einen 10K Pullup nach 5V ziehen. Deine anderen Fragen beantwortet übrigens das Datenblatt. Das solltest dz schon mal komplett gelesen haben. Es gibt auch noch eine Reihe Applicationsnotes von ST, die u.a. die Kombination L297/L298 behandeln. Es kann nicht schaden, auch da mal einen Blick reinzuwerfen. Mit freundlichen Grüßen Thorsten Ostermann
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.