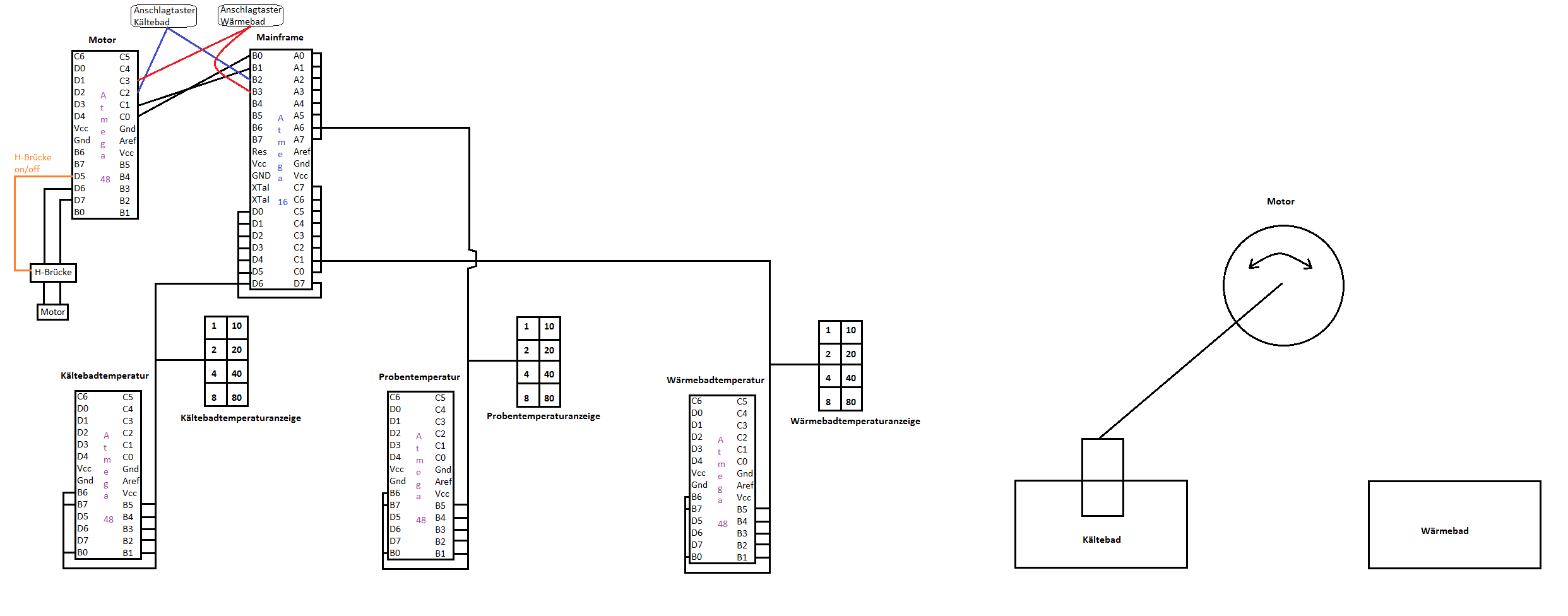
1 | //B2 Taster K?ltebad
|
2 | //B3 Taster W?rmebad
|
3 |
|
4 |
|
5 |
|
6 | #include <avr/io.h>
|
7 | #include <avr/interrupt.h>
|
8 | #define F_CPU 2000000
|
9 | #include <util/delay.h>
|
10 | #include <inttypes.h>
|
11 | #include <stdint.h>
|
12 |
|
13 | #define TRUE 1
|
14 | #define FALSE 0
|
15 |
|
16 | // Anchlussbelegung:
|
17 |
|
18 | #define KTEMP_DDR DDRD //Temperatur Input vom Kältebad
|
19 | #define WTEMP_DDR DDRC //Temperatur Input vom Wärmebad
|
20 | #define PTEMP_DDR DDRA //Temperatur Input von Probe
|
21 |
|
22 | #define MOTOR_DDR DDRB //Datenrichtung zum Motor-Steuer-Atmega festlegen
|
23 | #define MOTOR_OUT PORTB //Ausgänge zum Motor-Steuer-Atmega
|
24 | #define MOTOR_IN PINB
|
25 |
|
26 | #define CW PB0 //Motor cw richtung Kältebad
|
27 | #define CCW PB1 //Motor ccw richtung Wärmebad
|
28 | #define KB PB2 //Taster Kältebad abfragen
|
29 | #define WB PB3 //Taster Wärmebad abfragen
|
30 |
|
31 | void entprellung( volatile uint8_t *port, uint8_t maske ) {
|
32 | uint8_t port_puffer;
|
33 | uint8_t entprellungs_puffer;
|
34 |
|
35 | for( entprellungs_puffer=0 ; entprellungs_puffer!=0xff ; ) {
|
36 | entprellungs_puffer<<=1;
|
37 | port_puffer = *port;
|
38 | _delay_us(150);
|
39 | if( (*port & maske) == (port_puffer & maske) )
|
40 | entprellungs_puffer |= 0x01;
|
41 | }
|
42 | }
|
43 |
|
44 |
|
45 | int main(void)
|
46 | {
|
47 | uint8_t w_temp = 0; //Variable zum speichern der Zustände vom Wärmebad
|
48 | uint8_t k_temp = 0; //Variable zum speichern der Zustände vom Kältebad
|
49 | uint8_t p_temp = 0; //Variable zum speichern der Zustände von der Probe
|
50 |
|
51 | const uint16_t pause = 200;
|
52 | const uint16_t pause_2 =80;
|
53 |
|
54 |
|
55 | KTEMP_DDR = 0x00; //Eing?nge D
|
56 | WTEMP_DDR = 0x00; //Eing?nge C
|
57 | PTEMP_DDR = 0x00; //Eing?nge A
|
58 |
|
59 | //B0 un B1 als Ausgänge, B2 und B3 als Eingänge:
|
60 | MOTOR_DDR = (1 << DDB0) | (1 << DDB1);
|
61 |
|
62 | //Pause für 20 Sekunden damit alles andere initialisieren kann
|
63 | for(int a=0; a<20; a++){_delay_ms( 1000 );}
|
64 |
|
65 | do
|
66 | {
|
67 | k_temp = 0;
|
68 | p_temp = 0;
|
69 | w_temp = 0;
|
70 |
|
71 | //Temperaturen von den LED Anzeigen abholen.
|
72 | if ( PINA & (1<<PINA0) ) {p_temp = p_temp + 1;}
|
73 | if ( PINA & (1<<PINA1) ) {p_temp = p_temp + 2;}
|
74 | if ( PINA & (1<<PINA2) ) {p_temp = p_temp + 4;}
|
75 | if ( PINA & (1<<PINA3) ) {p_temp = p_temp + 8;}
|
76 | if ( PINA & (1<<PINA4) ) {p_temp = p_temp + 10;}
|
77 | if ( PINA & (1<<PINA5) ) {p_temp = p_temp + 20;}
|
78 | if ( PINA & (1<<PINA6) ) {p_temp = p_temp + 40;}
|
79 | if ( PINA & (1<<PINA7) ) {p_temp = p_temp + 80;}
|
80 |
|
81 | if ( PINC & (1<<PINC0) ) {w_temp = w_temp + 1;}
|
82 | if ( PINC & (1<<PINC1) ) {w_temp = w_temp + 2;}
|
83 | if ( PINC & (1<<PINC2) ) {w_temp = w_temp + 4;}
|
84 | if ( PINC & (1<<PINC3) ) {w_temp = w_temp + 8;}
|
85 | if ( PINC & (1<<PINC4) ) {w_temp = w_temp + 10;}
|
86 | if ( PINC & (1<<PINC5) ) {w_temp = w_temp + 20;}
|
87 | if ( PINC & (1<<PINC6) ) {w_temp = w_temp + 40;}
|
88 | if ( PINC & (1<<PINC7) ) {w_temp = w_temp + 80;}
|
89 |
|
90 | if ( PIND & (1<<PIND0) ) {k_temp = k_temp + 1;}
|
91 | if ( PIND & (1<<PIND1) ) {k_temp = k_temp + 2;}
|
92 | if ( PIND & (1<<PIND2) ) {k_temp = k_temp + 4;}
|
93 | if ( PIND & (1<<PIND3) ) {k_temp = k_temp + 8;}
|
94 | if ( PIND & (1<<PIND4) ) {k_temp = k_temp + 10;}
|
95 | if ( PIND & (1<<PIND5) ) {k_temp = k_temp + 20;}
|
96 | if ( PIND & (1<<PIND6) ) {k_temp = k_temp + 40;}
|
97 | if ( PIND & (1<<PIND7) ) {k_temp = k_temp + 80;}
|
98 |
|
99 | //+-2 damit das Testen schneller geht.
|
100 | k_temp = k_temp + 2;
|
101 | w_temp = w_temp - 2;
|
102 |
|
103 | //Wenn Taster vom K?ltebad an (d.h. Probe ist im Kältebad)
|
104 | entprellung( &PINB, (1<<PINB2) ); // ggf. Prellen abwarten
|
105 | if((PINB & (1<<KB)))
|
106 | {
|
107 | //Motor erst mal grundlegend ausschalten, um einen definierten Startwert zu haben
|
108 | PORTB &= ~ (1<<CCW); //Motor aus
|
109 | PORTB &= ~ (1<<CW); //Motor aus
|
110 |
|
111 |
|
112 | if((p_temp <= k_temp)) //fals Probentemp gleich Kältebadtemp ist
|
113 | {
|
114 |
|
115 | //ins Wärmebad fahren)
|
116 | //PORTB &= ~ (1<<CCW);
|
117 | PORTB |= (1<<CW);
|
118 | }
|
119 | }
|
120 |
|
121 | //Wenn Taster vom Wärmebad an (d.h. Probe ist im Wärmebad)
|
122 | entprellung( &PINB, (1<<PINB3) ); // ggf. Prellen abwarten
|
123 | if((PINB & (1<<WB)))
|
124 | {
|
125 | //Motor erst mal grundlegend ausschalten, um einen definierten Startwert zu haben
|
126 | PORTB &= ~ (1<<CCW); //Motor aus
|
127 | PORTB &= ~ (1<<CW); //Motor aus
|
128 |
|
129 |
|
130 | if((p_temp >= w_temp))// fals Probentemp gleich Wärmebadtemp ist
|
131 | {
|
132 | //ins Kältebad fahren
|
133 | //PORTB &= ~ (1<<CW);
|
134 | PORTB |= (1<<CCW);
|
135 |
|
136 | }
|
137 | }
|
138 |
|
139 | } //ENDE do
|
140 | while(1);
|
141 |
|
142 | } //ENDE main
|