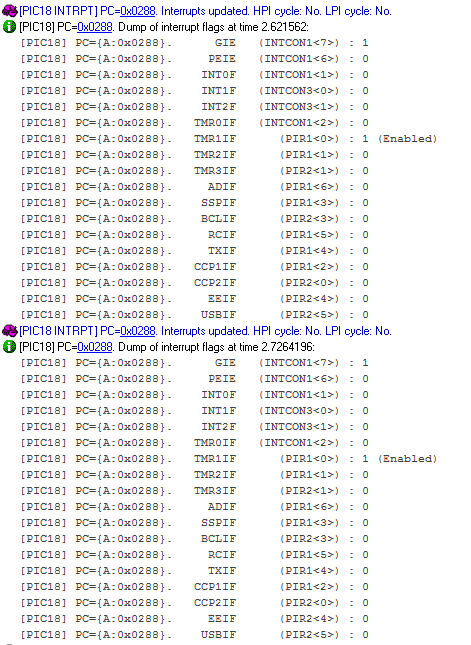
ich hab gerade mit der programmierung von einem PIC18F4550 begonnen. IDE: mplab + proteus/isis compiler: C18 vorkenntnisse: 8051, AVRs ich bin durch ein wenig googeln nun darauf gekommen, dass der pic18f generell nur 2 interruptvektoren kennt, 0x08 für high priority und bei 0x18 für high priority. so gut so weit. leider wird meine ISR (Timer1_ISR()) nie ausgeführt? code ist copypasta. gibt es denn keine möglichkeit dem compiler zu sagen: die funktion soll meine timer1 isr sein? ausser über die flagunterscheidung. der timer1 interrupt tritt jedenfalls auf, sagt isis (siehe screenshot). vielleicht kann man der simulation auch nicht ganz trauen.
1 | //main insterrupt handler |
2 | #pragma interruptlow MainISR |
3 | void MainISR(void) |
4 | {
|
5 | Timer1_ISR(); |
6 | } |
7 | |
8 | //high ISR routine |
9 | #pragma code _HIGH_INTERRUPT_VECTOR = 0x000008 |
10 | void ISR_high(void) |
11 | {
|
12 | _asm |
13 | goto MainISR // Sprung zur Interruptroutine |
14 | _endasm |
15 | } |
16 | //low ISR routine |
17 | #pragma code _LOW_INTERRUPT_VECTOR = 0x000018 |
18 | void ISR_low(void) |
19 | {
|
20 | _asm |
21 | goto MainISR // Sprung zur Interruptroutine |
22 | _endasm |
23 | } |
1 | void InitializeRTC(void) |
2 | {
|
3 | T1CONbits.RD16 = 1; //16 bit mode |
4 | T1CONbits.T1CKPS1 = 1; //prescaler: 1:8 |
5 | T1CONbits.T1CKPS0 = 1; |
6 | T1CONbits.T1OSCEN = 1; //enable oscillator circuit |
7 | T1CONbits.TMR1CS = 0; //use internal clock |
8 | T1CONbits.T1SYNC = 0; //synchronize timer with external clock |
9 | |
10 | TMR1L = 0x00; |
11 | TMR1H = 0x00; |
12 | |
13 | T1CONbits.TMR1ON = 1; //enable timer 1 |
14 | } |
15 | |
16 | void Timer1_ISR(void) |
17 | {
|
18 | T1CONbits.TMR1ON = 0; //disable timer 1 |
19 | PIR1bits.TMR1IF = 0; //reset flag |
20 | TMR1L = 0x00; //reset timer registers |
21 | TMR1H = 0x00; |
22 | MAX7219_DisplayChar(3,'A'); |
23 | T1CONbits.TMR1ON = 1; //enable timer 1 |
24 | } |
1 | //initialize interrupts |
2 | void ConfigureInterrupts() |
3 | {
|
4 | RCONbits.IPEN = 0; //no interrupt priority |
5 | RCONbits.SBOREN = 0; //no brownout detection |
6 | |
7 | //timer |
8 | PIE1bits.TMR1IE = 1; //enable timer 1 interrupt |
9 | INTCONbits.GIE = 1; //global interrupt enable |
10 | } |