Hallo Ich möchte die Regelstrukturen von Antriebsverstärkern besser verstehen. Die Regelstrukturen bestehen aus Lage- Drehzahl- und Stromregler: http://de.wikipedia.org/w/index.php?title=Datei:Kaskadenregelkreis.png&filetimestamp=20070315221601 Der Ausgang des Lagereglers ist der Eingang des Drehzahlreglers - aber wie entsteht der Drehzahlsollwert aus der Stellgröße des Lagereglers, diese ist ja nur der Regelfehler mit Kp verstärkt? mfg Edwin
Edwin L. schrieb: > wie entsteht der Drehzahlsollwert aus der Stellgröße des Lagereglers, > diese ist ja nur der Regelfehler mit Kp verstärkt? Und je größer dieser Regelfehler ist, desto schneller (=mehr Drehzahl) versucht der Lageregler, den Regelfehler wieder auf 0 zu bringen. Der Drehzahlregler hat dann die Aufgabe diese Drehzahl auch tatsächlich zu erreichen und gemäss der Vorgabe zu halten. Ungeachtet dessen, ob irgendwo zb Reibung auftaucht, die die Drehzahl kurzfristig einbrechen lässt. D.h. Der Lageregeler kann davon ausgehen, dass sich die Regelstrecke auch tatsächlich mit genau der 'Geschwindigkeit' bewegt, die er aufgrund seiner Regelabweichung vorgibt.
Angehängte Dateien:
-

lage_drehzahl.jpg
37 KB
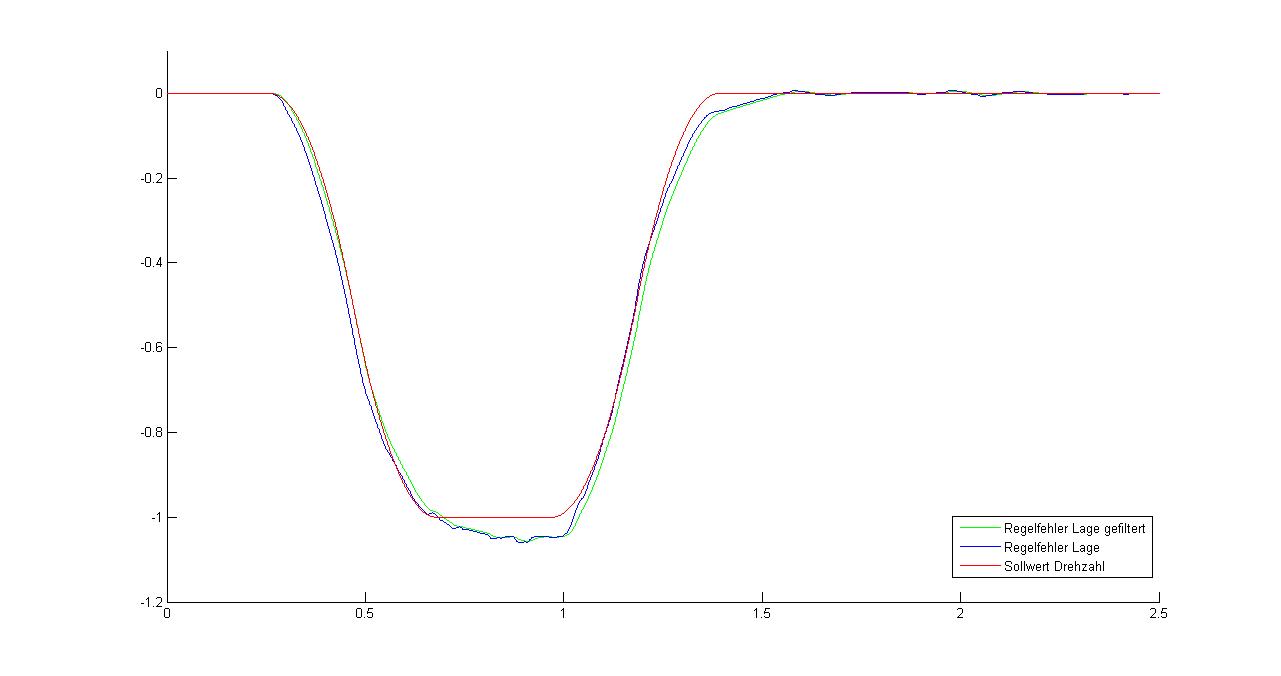
Hallo Danke für die schnelle Antwort. OK, hatte einen Fehler in der Darstellung. Lagestellgröße und Drehzahlsollwert passen zwar einigermaßen gut zusammen, aber eine Abweichung lässt sich trotz starker Filterung nicht entfernen - wie lässt sich dieser Unterschied erklären? Siehe Bild im Anhang (0.2 bis 0.7sek: Beschleunigung; 0.7 bis 1sek: konstante Fahrt; 0.7 bis 1.4 sek: Verzögerung). mfg Edwin
Der Stromregler uebernimmt wenn die maximale Stellgeschwinigekeit erreicht werden muss. Dann laeuft das System an der vorgegebenen Drehmomentgrenze. Der Drehzahlregler uebernimmt, wenn das System auf einer Drehzahl laufen soll. Die kann auch als Limite vorgegenen werden. Wenn das Strom- resp Drehmomentlimit vorher erreicht wird uebernimmt der Stromregler. Der Lageregler erzeugt das Drehzahl Signal um die Lage zu erreichen. Dann uebernimmt der Drehzahlregler. Der Stromregler ist der schnellste, dann kommt der Drehzahlregler, dann der Lageregler.
Hy Danke für die Antwort, ich glaube, ich habs jetzt verstanden: Prinzipiell folgt der Drehzahlsollwert dem Lageregler, doch wenn max. Geschw, max Beschl. oder max Ruck auftreten, dann folgt der Verlauf diesen Größen? mfg Edwin
Angehängte Dateien:
-

drehzahl_strom.jpg
45 KB
{kind=link}
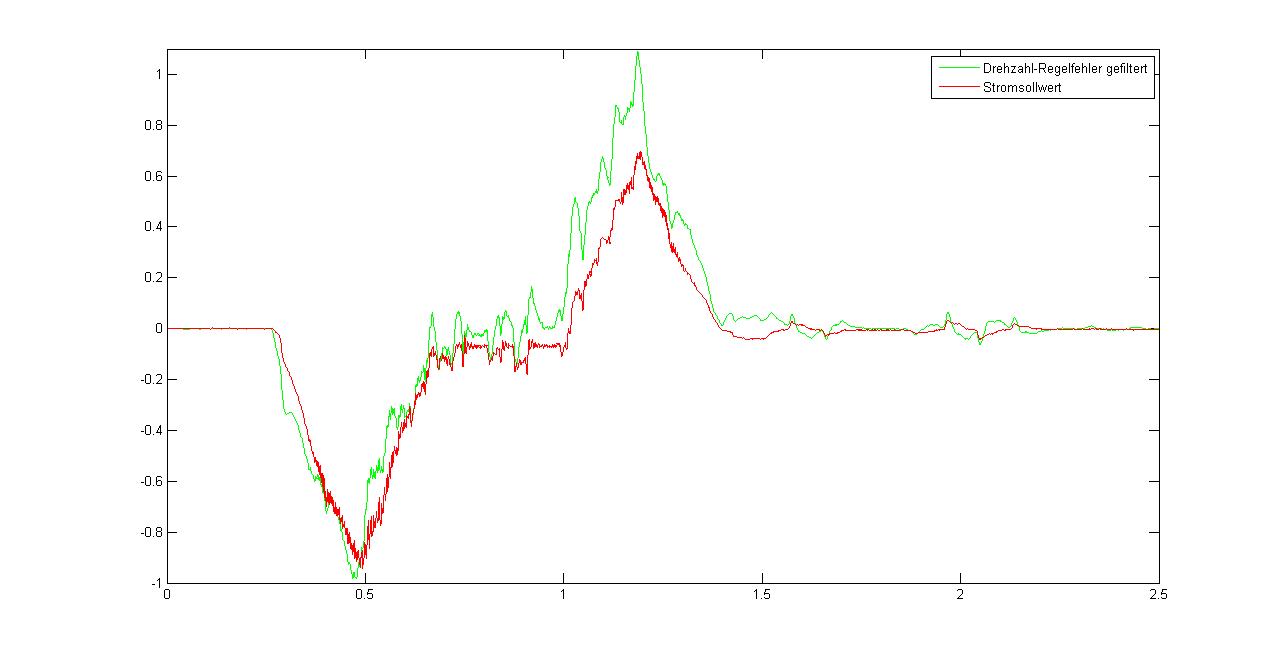
Ich habe mir den Drehzahlausgang bzw. Stromsollwert angesehen, betrachtet man den Teil nach der Verzögerung, so fällt auf, dass der Strom nicht mehr dem Drehzahlregler folgt. In diesem Bereich dürfte aber auch keine Grenze auftreten. mfg Edwin
Hy Leute Ich habs nun endlich geschafft: Beim Geschwindigkeitsregler wird meist ein PI-Regler verwendet. Dabei liegen P-Glied und I-Glied parallel, das ergibt folgende Übertragungsfunktion: G(s) = (Kp+Kp*Tn*s) / (Tn*s) Tn: Nachstellzeit Kp: Verstärkung Verwendet man nun als Eingang den Geschw.-Regelfehler, so erhält man als Ausgang den Stromsollwert. Ich hatte die Verstärkung Kp nur im P-Glied, dadurch erhielt ich falsche Ergebnisse. Dadurch ergibt sich aber ein neues Problem: Ich möchte vom Stromsollwert auf den Geschw.-Sollwert schließen, doch wie bringt man die inverse Übertragungsfunktion in den Zeitbereich ohne Dirac? Bzw. wie kann diese Funktion auf Messwerte anwenden? Mein Ergebnis: -exp(-t/Tn)/(Kp*Tn)+dirac(t)/Kp mfg
Das ist m.E. nicht so schlicht. 'input estimation' ist Stichwort. Beim diskreten System x(k+1)=A*x(k)+D*u(k) kannst Du die u ja eigentlich bestimmen, wenn Du die x kennst. Das ist aber in der Regel nicht ohne weiteres der Fall, dazu brauchst Du einen Beobachter. Du kennst ja in Deinem Fall z.B. nicht den Zustandswert des I-Anteils des Reglers. Kannst Du die Geschwindigkeitsvorgabe nicht einfach messen? Cheers Detlef
Hy Da beginnt mein Problem schon, ich komme nicht auf die Regelungsnormalform von meiner DGL: y' = Kp*x' + Kp/Tn*x Beim lösen der DGL weiß ich nicht, wie ich y' behandeln muss. Klar kann ich die Geschwindigkeitsvorgabe messen, aber es geht darum, dass ich zum Stromsollwert einen Additiven Sollwert aufschalten muss und diesen Einfluss muss ich im Geschwindigkeitsregler kompensieren, sonst regelt dieser dagegen. mfg
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.