Hallo, habe mir nach einer Vorlage aus'm Netz einen iir-Filter 2. Ordnung gebaut und der schwingt auch schön: Formel: y[n]= A*y[n-1] + B*y[n-2] + x[n] y[n]= 1,9757*y[n-1] - y[n-2] + x[n] bestimmt mit: y[0] = sin((2pi/40)*0) = 0 y[1] = sin((2pi/40)*1) = 0,1564 y[2] = sin((2pi/40)*2) = 0,3090 y[2] = sin((2pi/40)*3) = 0,0454 eingesetzt in: y[2] = A*y[1] + B*y[0] y[3] = A*y[2] + B*y[1] findet man: B = -1 A = 1,9757 Formel: y[n]= A*y[n-1] + B*y[n-2] + x[n] y[n]= 1,9757*y[n-1] - y[n-2] + x[n] alles in "int 32bit" gepackt und in eine Funktion geschrieben kann ich die Schwingung hören. Probleme habe ich mit der Bestimmung der Frequenz: Kann man die Aufteilung einer Schwingung(2pi) in 40 Teile als "Schrittweite" interpretieren? -> Nach 40 Aufrufen der iir() Funktion erhalte ich eine komplette Sinus-Schwingung. Ich rufe die Funktion mit ca 48 kHz auf, somit erhalte ich T(Sinusschwingung) = 40 * 1/48 kHz = 0,8333 ms entspricht ca. 1200 Hz. Stimmt das soweit? Wie kann ich die Schwingung "feiner" machen bzw. die Frequenz verändern. Ich habe schon den Koeffizienten A für 2pi/1meg ausgegerchnet aber dann schwingt der Filter nicht mehr so schön rund. Frequenz verändern durch varieren des Aufrufintervalls (z.B. vergrößern) der Funktion macht die Schwingung auch immer "gröber". Kann mir jemand sagen, ob man die Frequenz der Schwingung des Filters dem iir-Filter praktisch implizit beibringen kann? Viele Grüße
Das Filter hat eine Grenzfrequenz, die Du berechnen und auf das Filter anpassen kannst. Die anregende Frequenz muss dazu passen. "nicht so schön rund" deutet darauf hin, dass die Anregung zu schnell ist, bzw die Grenzfrequenz nicht nachgeregelt ist. Am Besten spielst Du Dir das Filterverhalten in Excel oder SciCos / Matlab mal durch. 1. Spalte: alle 10 Werte alternierende 100, -100 2. Spalte: Wert = 0,1 * erste Spalte + 0,9 * alter Wert obendrüber 3. Spalte: Wert = 0,1 * zweite Spalte + 0,9 * alter Wert obendrüber Schon ab der 2. Stufe macht das aus einem Rechteck einen reltaiv guten Sinux mit -6dB Amplitude. Für geringere Frequenzen ist die Verteilung nue zu alt dann z.B. 0,05 / 0,95 Aus der Anstiegszeit des Filters kann man die Grenzfrequenz bestimmen. Der Faktor war glaube ich e, jedenfalls knapp Faktor 3. f = 2,8 * 1/t Ich hänge so einen Filter gerne hinter meine DDSen, wenn ich mit kleinen Tabellen arbeite. Man muss nur Phase und Amplitude korrigieren.
Angehängte Dateien:
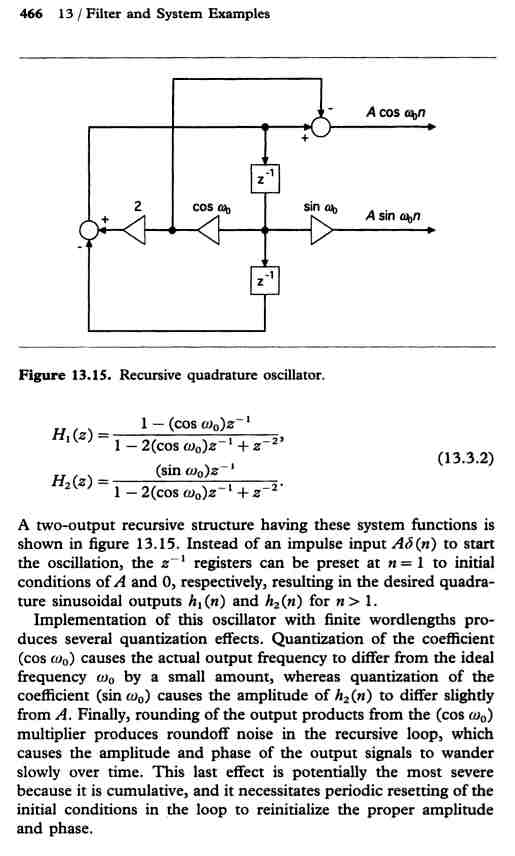
Das Buch ISBN 9780792395591 habe ich mir gerade gebraucht gekauft, darin ist auch ein IIR-Sinus/Cosinus-Generator beschrieben. Anscheinend sollte man spätestens nach ein paar Schwingungen wieder auf die Startbedingungen resetten.
Der A Koeffizient bestimmt Dir die Frequenz, B ist immer -1 . Rechnung geht so: 1.9757 = 2*cos(Schrittweite) dann ist Schrittweite = 0.1560 rad In 2*pi/Schrittweite = 40.265 Schritten bist Du also einmal 'rum' um den Kreis, oder anders formuliert, Deine Aufruffrequenz wird durch 40.265 geteilt. Bei den Filtern muss man aufpassen, dass nichts aufschwingt, gerade bei Integerrechnung wichtig. Es gibt auch spezielle Filterstrukturen, die besser für die Erzeugung geeignet sind als die verwendete. Bei Nachfrage gern mehr. Cheers Detlef
Das Aufschwingen lässt sich verhindern, indem man Verluste einbaut. Ein fach einige Promille der Werte versickern lassen. Das stabilsiert.
Hallo,
schonmal vielen Dank an die Antworter.
Ich komme so langsam mit.
Ich habe den Generator angeschmissen in dem ich wie unten zu sehen das
Array- Feld[1] mit einem Wert vorlade, und dann einfach sich selbst
überlassen. Das funktioniert auch ganz fein. Ich wurde dann aber
neugieriger und wollte die Frequenz einstellbar machen und möglichst
einen "perfekten" Sinus erhalten.
Der erste Versuch war, eine Verzögerung einzubauen, was aber nicht sehr
schön ist. Hier der Code dazu, bitte seht über die unsinnige
Parameter-Übergabe oder Nicht-Übergabe hinweg. Für Tipps und Vorschläge
wie ich oben beschriebenes gut implementieren könnte, wäre ich sehr
froh:
int IIR_sin_gen(int delay){
int i;
//for (i=0; i<delay; i++) asm("nop;");// Verzögerung
int output;
static int A = 0x7e66;
//pi/40->0x7e66
// pi/1meg->0xffffac1b ;
// A=(1.975/2 * 32768)
static int y[3] = { 0, 0x120902de, 0};
//y1->pi/40->0x120902de
//y1=(0.1409*32768)
y[0] = (((A*y[1])>>15) + ((A*y[1])>>15)) - y[2];
y[2] = y[1]; /* y2 <-- y1 */
y[1] = y[0]; /* y1 <-- y0 */
output = y[0];
return ( output);
} //IIR_sin_gen()
Hallo Klausi, ich finde deinen Beitrag sehr interessant.Wie kommst du auf diese Gleichung? --> y[n]= A*y[n-1] + B*y[n-2] + x[n] Und warum 2. Ordnung ? Man könnte doch eigentlich einen IIR Filter 1. Ordnung realisieren, der nur einen Pol auf dem Einheitskreis hat ? Dies führt auch dazu, dass das System dann schwingt, oder ?
1----- >>Der erste Versuch war, eine Verzögerung einzubauen, was aber nicht sehr >>schön ist. Du baust keine weitere Verzögerung ein, du machst damit kein Filter 3. Ordnung, das y[0] benutzt Du nur als Zwischenspeicher ohne es in der Rückkopplung zu verwenden, Dein Filter ist nach wie vor 2.Ordnung und das reicht auch, 1.Ordnung reicht zu Schwingen nicht. Vergiss das y[2], y[0] und y[1] reicht. 2---- y initialisierst Du mit 0x120902de, dann macht Dir ((A*y[1])>>15)) nen Overflow bei 32 Bit int Rechnung. Bei 32 Bit Rechnung darf A max. 16Bit sein (ist es) und die y auch (die sind größer). 3---- >>>Ich habe den Generator angeschmissen in dem ich wie unten zu sehen das >>>Array- Feld[1] mit einem Wert vorlade, und dann einfach sich selbst >>>>überlassen. Das ist richtig so: y 'vorladen', das bestimmt Dir Amplitude und Phase des Generators und hat mit der Frequenz nix zum tun. Die Frequenz wird einzig und allein durch A bestimmt. Dein Filter ist stabil und richtig, wenn Du (in Deinem Fall) nach 40-Umläufen wieder die Initialwert in y[0] und y[1] stehen hast. Falls nein muß Du das erzwingen oder genauer rechnen (64 Bit) oder mit der Genauigkeit des A fummeln. 4---- Das geht besser: Die Größen y[0] und y[1] betrachtest Du als die Komponenten eines Vektors, den Du um 2*pi/40 drehst. So: y0alt=y[0]; y1alt=y[1]; y[0]=cos(2*pi/40)*y0alt-sin(2*pi/40)*y1alt; y[1]=sin(2*pi/40)*y0alt+cos(2*pi/40)*y1alt; Alles natürlich auf Integerrechnung umlügen. Das kostet mehr Multiplikationen (ich glaube 2 statt einer wenn man Ergebnisse clever zwischenspeichert) ist aber numerisch stabiler. Kann man auch besser 'vorladen', nämlich direkt mit der gewünschten Amplitude. http://de.wikipedia.org/wiki/Rotationsmatrix math rulez! Cheers Detlef
Ich brauchte Spaß und habe die Rotation in Integerrechnung gebastelt,
Sourcecode angehängt.
Das implementiert einen Quadraturgenerator (Sinus sind die y[0], Cosinus
sind die y[1] ), der nach 40 Iterationen einmal GENAU auf seinen
Ausgangspunkt zurückkommt). y[0] habe ich immer mit 0 initialisiert,
Initialisierung von y[1] habe ich möglichst groß machen wollen. Die
defines der SI und CO habe ich mit Korrekturwerten versehen, +1 bzw. +2,
sodass der Initialisierungswert des y[1] möglichst groß wurde. Dann war
22370 das Maximum, das ich gefunden habe. Das ist auch die einzige
Lösung, die ich gefunden habe, die mit Initialisierung mit einer 2er
Potenz funktioniert, nämlich 1024.
Das ist eine anschauliche Implementierung, das gleiche läßt sich
effektiver coden.
Cheers
Detlef
int16_t y[2];
int16_t n,k,m;
int16_t yalt[2];
#define SI ((int16_t)(32767*sin(2*3.141592654/40))+1)
#define CO ((int16_t)(32767*cos(2*3.141592654/40))+2)
y[0]=0;
y[1]=22370;
//y[1]=1024;
for(k=0;k<40;k++){
yalt[0]=y[0];
yalt[1]=y[1];
y[0]= (int16_t)(((int32_t)yalt[0]*CO-(int32_t)yalt[1]*SI)>>15);
y[1]= (int16_t)(((int32_t)yalt[0]*SI+(int32_t)yalt[1]*CO)>>15);
printf("k %d y[0] %d y[1] %d\n",k,y[0],y[1]);
}
return;
Wow, vielen Dank an Detlef_a, ich werde das erst morgen ausprobieren und nachvollziehen können. Bis Dahin viele Grüße
Hallo zusammen, sehr interessanter Beitrag ich habe im Moment die Aufgabe ein Synthesizer auf zubauen vielleicht auch mit der oben beschriebenen Methode. Nun habe ich jedoch eine Frage gibt es eine Möglichkeit um die Frequenz zu ändern damit ich ein Sweep habe?
Was sehr einfaches ist hier: http://www.musicdsp.org/archive.php?classid=1#10 Ist vom Prinzip her ein State-Variable-Filter. Der Coeffizient 'a' muss ja nicht pro Sample aktualisiert werden, wenn man blockweise arbeitet. Z.B. alle 16 oder 32 Samples, das sollte für einen Sweep reichen.
Wenn es möglichst kontinuierlich sein sollte, wird man schon pro Sample arbeiten müssen, oder?
Bei 44k SR wäre das 'ne halbe ms pro Update. Das hört kein Mensch. Selbst für 'zap'-Sounds (von oben nach unten) ist das noch schnell genug. Die meisten Software-Synths machen das nur alle 16 - 64 Samples. Eine andere Lösung wären halt normale Biquads. Aber die sollten für schnelle Sweeps in Direct Form I sein, nicht II, andernfalls werden die bei schnellen Koeffizenten-Updates schnell instabil. Klar, das Update kann auch pro Sample sein. 1x Sinus ist ja auf aktuellen Systemen nicht mehr so teuer (LUT würde ich wg. Cache/Speicherzugriff nur noch selten machen). Bei den Chamberlins sollte man aber beachten, dass man mindestens 4x oversamplen sollte, um bei 44k den gesamten hörbaren Bereich durchsweepen zu können.
Hallo, Kann mir einer nochmal genauer erklären wie man auf die Startwerte kommt. Mir ist aufgefallen das es nicht mit allen Werten funktioniert, aber ich bin mir sicher, dass es eine Abhängigkeit gibt, die das Problem Mathematisch löst oder? Habe es jetzt gefunden! hier steht es: http://www.musicdsp.org/archive.php?classid=1#10 Init: w = omega = f/fa*pi ip = initial phase e.g. pi/4 y1=sin(ip-w) y2=sin(ip-2*w)
Man kann sich das am Einfachsten so vorstellen, dass es ein idealer Oszillator ist, der irgendeine Form von Anfangsenergie benötigt, die dann das Filter selbständig schwingen lässt. Die Methodik krankt aber nach meinen Erfahrungen an der Akkumulation der Fehler. Wenn man kein natürliches Verhalten eines Oszillators braucht, ist DDS letztlich einfacher und genauer.
Noch eine Frage :) jetzt habe ich die tolle Formel gefunden, aber wie stelle ich damit die Amplitude ein? oder wähle ich die Phase einfach so dass ich als Startwerte möglichst große Werte habe?
J. S. schrieb: > aber wie > stelle ich damit die Amplitude ein? oder wähle ich die Phase einfach so > dass ich als Startwerte möglichst große Werte habe? Steht doch dort in den comments: "FYI you can set s[0] to whatever amplitude of sinewave you desire. With 0.5, you will get +/- 0.5"
Warum multiplisierst Du nicht einfach den Ausgangswert mit dem benötigten Faktor? Den Sinusgenerator würde ich lieber auf maximaler Auflösung rechnen- und schwingen lassen
Hier hätte ich nocn einen einfachen Sinusgenerator: http://www.hobby-roboter.de/forum/viewtopic.php?f=5&t=149
Der entspricht aber weitgehend dem im Beitrag weiter oben, nur das einige Parameter weggefallen sind, weshalb man umsoeher skalieren muss.
Du meinst den hier: Beitrag "Re: iir Filter als Sinusgenerator" Da sind zwei Multiplikationen drinn. In meiner Version keine. Auf einem AVR ist da ein exorbitanter Geschwindigkeitsunterschied.
Beim Vergleich der ganzen Lösungen muss man teilweise etwas genauer hinsehen: Nicht alles, was sich direkt mathematisch formulieren lässt, ist hinterher auch schnell, zumal ein händischer Sinus noch etwas anderes ist, als ein vollständiger Sinusoszillator. In Sachen Genauigkeit gibt es da auch Abweichungen und natürlich macht es noch einen Unterschied, ob man das auf einem mini-Controller, einem FP-DSP oder einen FPGA realisiert. Hier wäre eine manuelle Implementierung der verketteten Integratoren von oben fürs FPGA der einen realistischen Einschwingvorgang abarbeiten kann, mit Eingriffen für Frequenz, Beschleunigung, Dämpfung und Dithering für hochgenaues Ausschwingen auf Null. http://96khz.org/doc/vasynthesisvhdl
chris_ schrieb: > Du meinst den hier: > Beitrag "Re: iir Filter als Sinusgenerator" > Da sind zwei Multiplikationen drinn. In meiner Version keine. Auf einem > AVR ist da ein exorbitanter Geschwindigkeitsunterschied. Auch ein Shift ist eine Multiplikation...
...aber bei µC mit einem Barrelshifter nur 1 Cycle zum Abarbeiten (zB dsPICs haben sowas eingebaut).
... und bei einem ARM-Prozessor der Barrelshifter direkt hinger der ALU hängt und keine Rechenzeit frist. http://www-mdp.eng.cam.ac.uk/web/library/enginfo/mdp_micro/lecture4/lecture4-3-2.html
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.