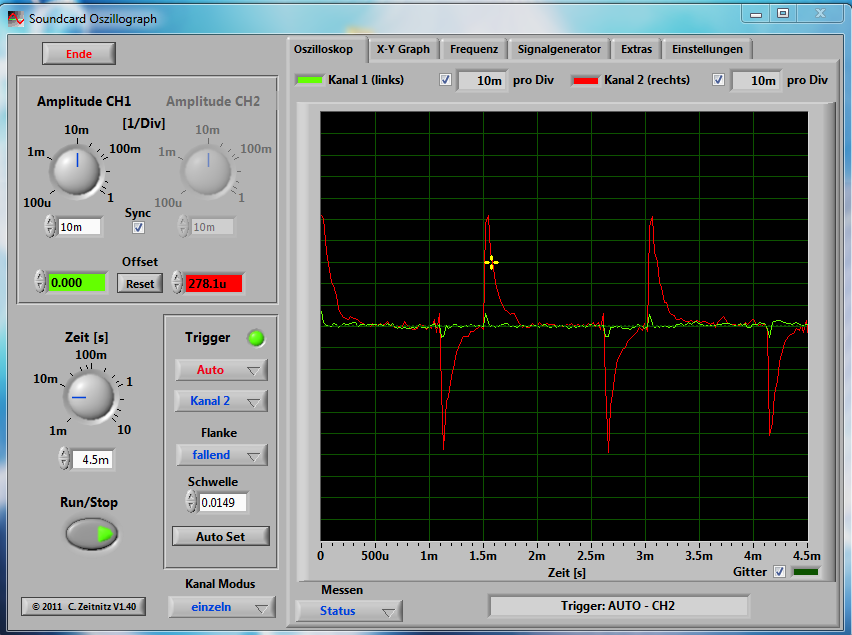
Hallo liebe Gemeinde, Ich habe hier eine Modellbaufernsteuerung Futaba FF7, nur das olle 40Mhz Funkmodul störte mich, schnell war es ausgebaut. Ein wenig habe ich schon mit RF22Bs rumgespielt, allso sowas sollte rein. µC-Empfänger der Telemetriedaten zurückschickt ist auch schon fertig. Aber was fehlt ist nun eben die Programmstruktur und Hardware des Senders weiterzuverwenden, und nur das HF Signal zu messen, digitalisieren und versenden. Gemessen habe ich das Signal auch schon, man kann eindeutig die Kanäle zuordnen, aber mein Problem ist die Form. Ich kenne mich Analog nicht genug aus um das dem ARM vernünftig beizubringen. Was für eine Schaltung benötige ich da? Ich kann mich grob an die Funktionsweise von Operationsverstärkern erinnern, aber das wars :( Hier ein Bild, das wohl mehr sagt als tausend Worte. mfg Johannes
Angehängte Dateien:
-

oszi.PNG
84 KB
Johannes V. schrieb: > Gemessen habe ich das Signal auch schon, man kann eindeutig die Kanäle > zuordnen, aber mein Problem ist die Form. > Ich kenne mich Analog nicht genug aus Eigentlich arbeiten alle Fernsteuerungen seit Jahrzehnten digital. :-) Die Info über die Rudermaschinenstellung steckt in der Impulslänge. Du brauchst also höchstens einen Komparator, um steile Flanken zu bekommen und kannst dann mit Deinem uC die Impulslänge messen. Gruss Harald
@Harald Wilhelms: Ja wie das Signal hinter den Flanken versteckt ist weiss ich. Das Problem ist, wie du schon erkannt hast, µC freundliche Flanken. Ich werde mal nach irgendwelchen Comparator Schaltungen / Grundlagen googeln. Andererseitd könnte ich auch einen ADC im Dauerbetrieb samplen lassen der einen Interrupt oder direkt einen Timer steuert wenn das Signal eine Schwellspannung überschreitet. Hat das schon jemand versucht? diese 0.5V scheinen mir halt gar wenig um darauf ein sicher funktionierendes System darauf zu stützen.
Harald Wilhelms schrieb: > Johannes V. schrieb: > >> Gemessen habe ich das Signal auch schon, man kann eindeutig die Kanäle >> zuordnen, aber mein Problem ist die Form. >> Ich kenne mich Analog nicht genug aus > > Eigentlich arbeiten alle Fernsteuerungen seit Jahrzehnten digital. > :-) > Die Info über die Rudermaschinenstellung steckt in der Impulslänge. Fast. An dieser Stelle ist es nicht die Impulslänge, sondern der zeitliche Abstand von einer Flanke zur nächsten. Erst im Empfänger entsteht dann daraus der Servoimpuls, bei dem die Pulsbreite die Positionsinformation verkörpert.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.