Hallo Leute, ich hoffe ich bin hier richtig und ihr könnt mir weiterhelfen. Zur Vorgeschichte: ich habe in einem VW Golf 1 ein Getriebe von einem Golf 4 verbaut. Ich möchte aber aus optischen Gründen den Golf 1 Tacho behalten. Das Problem: der Tacho vom Golf 1 wird mechanisch über eine Welle vom Getriebe angetrieben. Dich das Getriebe gibt mittels eines Sensors ein digitales Signal aus. Jetzt möchte ich eine Box bauen, die das digitale Signal "auswertet" und dann einen 12V Gleichstrommotor regelt, der die Tachowelle vom Golf 1 antreibt. Es gibt in Amerika schon solch eine Lösung. http://www.highperformancepontiac.com/tech/hppp_1007_electronic_speedometer_converter/index.html Diese Box kann man durch Schalter an verschiedene Getriebe anpassen, je nachdem wieviel Impulse das Getriebe ausgibt und wieviel Umdrehung der Tachowelle das Tacho benötigt! Jetzt hoffe ich dass jemand mir bei der Entwicklung eines Schaltplans für solch eine Platine weiterhelfen kann! Ich bin in sowas total Mies! Danke schonmal im voraus. Gruß Thomas
Hallo, wenn es eine Regelung werden soll, dann brauchst du eine Rückmeldung über die Drehzahl des Motors. Beispiele wären da eine Lichtschranke oder ein Hall-Senosor. Am einfachsten wäre es dann mit einem kleinen Mikrocontroller die Frequenz des Getriebegebers zu messen und dann den Motor mit einer PWM anzusteuern. Über die Rückmeldung der Motordrehzahl kannst du dann die PWM so regeln, dass sich das gewünschte Verhältnis einstellt.
Bring an deiner Motor(tacho)welle auch so einen Hallsensor (TLE4905) an, der einen Impuls bringt pro vorgegebenem Impuls. Dann kann eine PLL (Phasendiskriminator) beide Signale gleich regeln. Mit etwas geschickter Auslegung braucht man keinen Oszillator (VCO), keinen Filter und keinen Frequenzteiler keinen Anlogwert um dem Motor Strom zu geben, sondern nur ein XOR-Glied welches beide Signale vergleicht und bei Differenz dem Motor Strom gibt. Ich würde einen CD4013 nehmen um 2 MOSFETs zu steuern die + und - des Motors schalten. Da ein Auto nicht von 0-100 in 0 sec beschleunigt, wird die PLL bei richtiger Auslegung (Motormasse, Motorinduktivität, Impulswiederholrate) niemals ausrasten.
Ist es nicht sinnvoller, den elektronischen Tachogeber aus und einen mechanischen einzubauen? Das sollte normalerweise problemlos passen. citb
Guten morgen, Schonmal vielen Dank für eure Antworten! Es ist leider bei den 4motion (Allrad) Getrieben nicht möglich den elektronischen Geber durch die Tachowelle zu ersetzten, weil im Getriebe keine Welle dafür mehr läuft. Das ein Hallgeber an der Motorwelle kommt habe ich mit auch schon gedacht. So, an einen Mikrocontroller habe ich auch schon gedacht, das besteht für mich nur das Problem, dass ich den nicht programmieren kann. Das ich nicht in der Elektronik noch nicht so auskenne, wäre ich über einen Schaltplan sehr dankbar. Wie vergleicht man denn das PWM-Signal für den Motor mit dem Signal, dass der Hallgeber an der Motorwelle ausgibt?
Laut TÜV-Prüfer muss ich dann mit dem Auto zur Tacheichung und mit dem Protokoll ist eine Eintragung möglich.
Hallo, > So, an einen Mikrocontroller habe ich auch schon gedacht, das besteht > für mich nur das Problem, dass ich den nicht programmieren kann. > > Das ich nicht in der Elektronik noch nicht so auskenne, wäre ich über > einen Schaltplan sehr dankbar. Das kann man alles Schritt für Schritt machen, du musst nur selbst die Bereitschaft mitbringen zu lesen und dann entsprechende Detailfragen stellen, keiner in diesem Forum wird dir einen Schaltplan erstellen, aber dir wird sicher geholfen, selbst einen zu erstellen. > Wie vergleicht man denn das PWM-Signal für den Motor mit dem Signal, > dass der Hallgeber an der Motorwelle ausgibt? Dazu kannst du dir nochmal MaWins Beitrag durchlesen, das wäre der minimale Aufwand, du müsstest aber sicherstellen, dass ein Takt vom Getriebegeber einem Takt von deinem eigenen Geber an der Tachowelle entspricht, also mal gucken/ausrechnen vieviele welche Takte sich am Getriebe bei einem Kilometer ereignen(am besten im Datenblatt schauen). Wenns eine Tachowelle mit 950U/km ist, dann sollte dein Getriebe am besten genausoviele oder doppelte Impulse bringen, damit die einfache PLL Lösung klappt. Ansonsten hat man beim Mikrocontroller den Vorteil, dass man das Taktverhältnis völlig frei vorgeben kann. Dann brauchst du einen kleinen DC-Motor der bis 3000U/min schafft, eine kleine MOSFET Leistungsstufe Low-Side, an die geht dann dein PWM Ausgang. Als erstes muss du dann versuchen deinen Motor zu regeln. Dazu brauchst du den Rückgabewert über die Drehzahl. An der Motorwelle würde ich eine Lochscheibe mit einem Loch anbringen und dann in einer Gabellichtschranke rotieren lassen. Dann bekommst du ein Taktsignale pro Umdrehung deines Motors. Das Taktsignal legst du an einen Flankengetriggerten Interrupt-Pin und Zählst die Zeit zwischen zwei Flanken, welche der Umdrehungsdauer entspricht. Diese willst du ja Regeln, also hast du einen Sollwert für die Umdrehungsdauer, wenn dieser Überschritten wird, erhöhst du die PWM, wenn er unterschritten wird, muss die PWM verringert werden. Wenn das funktioniert, dann musst du aus dem Getriebesignal nur einen Sollwert für die Umdrehungsdauer berechnen. Dabei hast du genau den Vorteil, dass beliebige Verhältnisse möglich sind.
@Udo Ich habe die Firma in den USA angeschrieben, aber das Teil ist mir einfach zu Teuer. Allein der Versand soll 196$ kosten. @Arne Ich bin natürlich engagiert und will versuchen alles aalein zu erstellen. Aber da ich neuling in der Elektronik bin fällt mir das noch nicht so leicht. Ich denke die einfache Variante fällt weg, das die Wegimpulszahl des Getriebes mit meinen Rädern 4323Impulse/km und die Wegstreckenkennzahl des Tachos 950U/km betragen. Also kommen wir zum Mikrokontroller. Läuft alles (Frequnzauswertung, PWM Genaration, Verleich mit Signal der Lichtschranke usw) über den einen Mikrocontroller oder benötige ich noch weitere IC's? (ausgenommen Leistungsstufe und Lichtschranke) Ich hoffe auf weitere Unterstützung von euch...
Hallo, der Mikrocontroller will auf jedenfall noch ein bisschen Hühnerfutter, schau mal hier im Tutorial. Weiterhin solltest du im Auto zumindest noch eine Z-Diode gegen Überspannungen am Controller vorsehen. Weitere Logik-ICs brauchst du aber nicht. Das macht alles der Mikrocontroller. Wie sieht denn das Signal vom Getriebe aus? Gibt der direkt ein Signal aus, oder ist es ein Open Collector Ausgang?
Der Getriebesonsor ist ein Hallsensor, der eine annähernd rechteckiges Signal liefert. Das Signal wechselt zw. 0V und 9V. Siehe: http://www.t4-wiki.de/wiki/Geber_G22_%28Geschwindigkeit%29 Was meinst du mit Hühnerfutter? Die Beschaltung des Mikrocontrollers oder ein Programmierboard? Oder was?
Der Geber gibt also direkt das Spannungssignal aus, das du nicht belasten darfst. Also kannst du einen 10K Widerstand in Reihe zu einem 10K Widerstand, dem eine Z-Diode zum Schutz des Mikrocontrollers Parallel geschaltet ist nehmen und die Spannung dazwischen an den Mikrocontroller führen. Hühnerfutter ist eine Umschreibung für passive Bauteile wie Widerstände und Kondensatoren.
Ok, also greife ich die Spannung zwischen den Widerständen ab? Denn muss ich mich jetzt für einen Mikrocontroller entscheiden. Welcher empfiehlt sich da?
ich würde dir als Anfänger und für ein Einzelstück den AtMega8 empfehlen. Der Vorteil ist, dass sich die meisten Tutorials hier im Forum auf den Mikrocontroller beziehen. Möglich wäre das mit praktisch jedem Mikrocontroller aber da ist es oft schwieriger Hilfe zu finden, wenn die hier im Forum nicht allzu verbreitet sind.
Ok! Ich denke in Assembler wirds wohl für mich am einfachsten mit dem Programmieren! Benötigt die Lichtschranke auch noch diskrete Bauelemente? Oh man, denn werde ich mal versuchen alles zusammenzustellen und ne Schaltung zu basteln!
Wie wäre es statt Gleichstrommotor + Regelung ein Schrittmotor zu nehmen? Oder sind 3000 U/min. dafür zu viel? Gruß Dietrich
Hallo nochmal, ein Schrittmotor wäre teurer und auch aufwändiger. Bei 200 Schritten und 3000 U/min wären das 10000 Schritte pro Sekunde. @Thomas: ich würde dir vorschlagen gleich mit C anzufangen und dir nicht Assembler anzutun. Der Compiler übernimmt vieles was man sonst mühsam erledigen muss und von der Geschwindigkeit gibt es bei dir kein Problem. Bei der Lichtschranke kommt es natürlich auf den Typ drauf an, die meisten brauchen einen Vorwiderstand für die LED.
@Arne Du bist mir echt ne große Hilfe! Vielen dank dafür schonmal! Jetzt muss ich mich erstmal mit dem Atmega8 und dessen Beschaltung. Das wird wohl alles sehr schwierig, da ich mich mit sowas noch nie beschäftigt habe. Das Datenblatt hat ja auch reichlich Seiten. Mal sehen, ob ich da was auf die Beine stellen kann!
Was haltet ihr denn von einem einfachen Monoflop mit (PWM-)Motorendstufe,getriggert vom Sensor ? Über die Pulslänge des Monoflops erfolgt dann die 'Eichung' der Ausgangs PWM und diese geht über eine kleine Endstufe auf den Tachowellenmotor. Oder mach ich da jetzt einen Denkfehler ?
Ich verzweifel an dem Mikrocontroller. Gibts denn vielleicht eine Möglichkeit das ohne Mikrocontroller zu realisieren? Matthias' Lösung hört sich einfacher an.
Nun, was auf jeden Fall gehen würde, wäre eine Integrator(f/V Konverter)-> Dreieckgenerator->Komparator->PWM Kette, aber deswegen fragte ich ja in der Forengemeinde, was sie von der Idee mit dem Monoflop halten, da es die Sache deutlich vereinfachen würde.
Hallo, so wie ich das verstanden habe, kann man damit eine Steuerung des Motors erreichen, aber keine Regelung. Da der Motor eine Linear steigende Last (Gegenfeder) abgeben muss, wird doch bei einer Steuerung die Abweichung bei höheren Drehzahlen größer, oder nicht? Man kann nicht sagen, dass der Motor bei Spannung X die Drehzahl Y hat, wenn man die Last nicht kennt. Wenn man die Last modelliert könnte man auch eine Steuerung entwerfen. Wenn man eine kleine Regelung nimmt, hat man den Vorteil, dass man die Last und den Motor nicht weiter beachten muss. Wie hoch sind denn die Genauigkeitsanforderungen an einen Tacho?
Der Tacho darf eine Toleranz haben. Der darf bis zu 7% mehr anzeigen aber kein km/h zu wenig! Also es muss schon geregelt sein. Ich wäre glücklich, wenns ohne Mikrocontroller geht. Aber wenn nicht muss ich da halt durch.
Früher gingen ( und die älteren werden sich noch erinnern) Tachos regelmässig vor. In meinem 2002er Auto bin ich allerdings von einem exakt messenden Tacho (verglichen mit dem OBD-II Signal) überrascht worden. Bei mir ist es übrigens ne Welle, und nicht etwa was aus der Motorsteuerung.
Thomas P. schrieb: > Ja vorgehen darf er ja, nur nicht weniger anzeigen. Sowas kommt raus, wenn Gesetzeserlasser sich an Physik versuchen. Also bei gleichmäßiger links und rechts Fehlerverteilung soll er 3,5% drüber liegen. Gaußsche Glockenkurve 6-sigma oder so. Sehr komisch. Einen Mikrocontroller stemmt man nicht einmal so nebenher in ein paar Tagen, ohne diesbezügliche Vorkenntnisse. Machs analog oder vergib zumindest Teile davon als Auftrag. Meine Empfehlung.
Ich würde es auch lieber analog machen. Nur ist mir bis jetzt noch keine Idee gekommen wie der Soll-ist-Vergleich funktioniert! Man könnte ja aus der Frequenz vom Getriebe eine Gleichspannung machen und daraus ein PWM-Signal. Nur fehlt dann die Rückmeldung!
Wenn du keine Rückmeldung haben wirst, mußt du die Schaltung entsprechend präzise bauen, sodaß sie auch offline noch innerhalb der zulässigen Fehlergrenzen bleibt. Vorteil neben dem fehlenden Sensor ist dann auch eine automatische Stabilität, also keine Neigung zu Regelschwingungen. Vergleichen kann man analog nur auf zwei Wegen: - durch Spannung/Strom mittels Komparator/Subtrahierer - Phasenvergleicher was direkt zu einer PLL-Lösung führt Du wirst also irgendwo Frequenz/Spannung/Frequenz -Wandler brauchen.
Gibt es denn eine Möglichkeit eine Steuerung Möglichst präzise auszuführen? Durch einen starken Motor? Da der Motor ja durch PWM gesteuert werden soll weiß ich nicht wie man das PWM Signal mit dem der Lichtschranke vergleicht! Tut mir leid wenn ich mich etwas schwer tue!
Thomas P. schrieb: > Gibt es denn eine Möglichkeit eine Steuerung Möglichst präzise > auszuführen? > Durch einen starken Motor? Zumindest sollte er wenig interne Verluste haben. Ich glaube, es läuft auf eine Steuerung wie in den hochwertigen Plattenspielern raus. Die haben die Drehzahl auch praktisch lastunabhängig stabil gehalten. > > Da der Motor ja durch PWM gesteuert werden soll weiß ich nicht wie man > das PWM Signal mit dem der Lichtschranke vergleicht! > Grundsätzlich mußt du die zu vergleichenden Signale in die gleiche Domain bringen, also alles in Frequenzen ausdrücken oder alles in Spannungen. Das PWM-Signal läßt sich durch einen Tiefpaß in eine lineare Spannung umwandeln. Das Signal der Lichtschranke ist in der Frequenz-domain. Da brauchst du einen Frequenz-nach-Spannung-Konverter. Dann kannst du beide Spannungs-Signale per Subtrahierer vergleichen. Du siehst, es wird einfach zu langwierig alles zu erklären. Dir fehlen die ganzen Grundlagen. > Tut mir leid wenn ich mich etwas schwer tue! Kein Problem. Gehe jetzt trotzdem erstmal Essen :-)
> Was haltet ihr denn von einem einfachen Monoflop mit > (PWM-)Motorendstufe,getriggert vom Sensor ? Über die Pulslänge des > Monoflops erfolgt dann die 'Eichung' der Ausgangs PWM und diese geht > über eine kleine Endstufe auf den Tachowellenmotor. Oder mach ich da > jetzt einen Denkfehler ? Kein Vergleich der sich ergebenden Tachodrehzahl zur Originaldrehzahl, daher viel zu ungenau. > Ich verzweifel an dem Mikrocontroller. Glaube ich dir. Die Schaltung ist einfach wenn der Geber wirklich 0V/9V liefert, was ich kaum glauben kann, das würde ja 2 Adern plus Masseverbindung benötigen, ich erwarte eher daß man ihn über einen Widerstand an die Bordnetzspannung legen muss und hinter dem Widerstand die Spannung abwechselnd 12V/5V beträgt, aber wenn du meinst 0V/9V passen, dann passt diese Schaltung: +---------------------------------------------+ | ATtiny12 |BA6218 |1N4004 +-----+ +------+ +-------+ +12V --47uH--+--|>|--+--|L4995|--+--+--+--+--|VCC | | VCC | | | +-----+ | | | | | | | Out1|--+ P6KE15A 100uF | 100nF | | 5k | PB2|-|Rin | 47uH | | | | | | | | | | | +--+ +-------+-----+-----+ | 10k | | | | | | 47nF | | | | | | | | (M)-+ | | | | | PB3|-|Fin | | 47nF Signalgeber -(----10k---+-----------(--+--(--|PB0 | | | +--+ | | | | | | | | 47uH | | +-------+ | | | | Out2|--+ | 10nF |TLE4905|--+--|PB1 | | GND | | | +-------+ +------+ +-------+ | | | | | | | | | | GND ---------+----------+-----------+-----------+---------+ Aber nun kommt das Problem, es funktioniert noch nichts so lange der Mikrocontroller nicht programmiert ist, und das ist ein ganz anderes Thema. Ein Phasenvergleicher muß her, ein (digitaler) Filter um Masseträgheit des Tachomotors abzufangen und eine PWM um dessen Drehzahl an den Tachonennwert anzugleichen, und du wirst merken: Auch all die Helden hier, die so lauthals vom Mikrocontroller geschrieen haben, werden dir dieses Programm nicht präsentieren können. Mit Glück noch das zur Schaltung passende Interface, aber daß die Drehzahlanpassung funktioniert ist nahezu ausgeschlossen. Das ist nämlich nicht trivial. Und für ein zuverlässig funktionierendes Programm müssten dann noch Timingplausibilitätskontrollen und Watchdog mit rein.
Ja, das ist halt mein erster Versuch in der Elektronik! Beide Spannungen zu vergleichen ist klar. Nur werden die doch wahrscheinlich kaum gleich sein, selbst wenn der Motor die richtige Drehzahl hat!?
@MaWin Deine Schaltung sieht schon super aus. Aber: Ich gehe auch davon aus, dass es mit dem Programmieren nichts wird. Deswegen habe ich gehofft, das analog hinzubekommen. Doch dies schon schwerer zu sein als gedacht.
MaWin schrieb: > Ein Phasenvergleicher muß her, ein (digitaler) > Filter um Masseträgheit des Tachomotors abzufangen und eine PWM > um dessen Drehzahl an den Tachonennwert anzugleichen, Der Motor muss also auf jeden Fall ein Tachosignal liefern, welches an den letzten freien Pin des Tiny zurückgeführt wird. In diesem läuft dann ein Regler (PID aus AVR221 ist ein gut funktionierender Regler) der den Motor nach einer Stellgrösse regelt. Ich habe damit beruflich zu tun und hab mit AVR221 schon rumgespielt. Die Regelgrösse ist die Frequenz der Motortachopulse. Die Stellgrösse sind natürlich die Sensorimpulse, am besten direkt digital weiterverarbeitet durch Frequenzmessung (Sensor sollte also an einen Input Capture oder Interrupt-Pin). Sicher nicht trivial und eines der Probleme ist natürlich, die P-,I- und D- Parameter auf den Tachowellenmotor anzupassen. Um mit der Kiste zu kommunizieren, würde ich in dem Fall eher zu einem 'eine-nummer-grösser' Tiny tendieren , also ein 2313 oder tatsächlich gleich ein Mega48, aber das ist eigentlich wurscht.
> Der Motor muss also auf jeden Fall ein Tachosignal liefern, > welches an den letzten freien Pin des Tiny zurückgeführt wird. Dafür ist bereits der TLE4905 da. Der L4995 war übrigens ungeschickt, nehmen wir einen 78L05 :-)
Ein Syncronmotor mit der passenden Frequenz angesteuert sollte Regelung und damit jegliche Rueckfuehrung eruebrigen. Den muss man allerdings auf die maximale Last (250 km/h umd -30 Grad C) auslegen. citb
>Mit etwas geschickter Auslegung braucht man keinen Oszillator (VCO), >keinen Filter und keinen Frequenzteiler keinen Anlogwert um dem Motor >Strom zu geben, sondern nur ein XOR-Glied welches beide Signale >vergleicht und bei Differenz dem Motor Strom gibt. Geht aber nur, wenn das Tastverhältnis des Getriebesignals genau mit dem des vom DC-Motor gelieferten Signal übereinstimmt. Es ist doch viel universeller (und meistens wird es auch so gemacht), aus dem Getriebesignal erstmal ein (DC-)Sollwert zu bilden, mit dem man dann den (DC-)Motor regeln kann. Norm.weise ist die Drehzahl eines DC-Motors direkt prop zur Spannung. Weil die Last ja immer gleich ist, könnte bei entsprechend (gut) gewähltem Motor sogar die Regelung entfallen, also eine Steuerung wäre ausreichend. (Das Verhältnis Sollwert.U zu Motor.U bräuchte man nur einmalig anzupassen.)
> Doch dies schon schwerer zu sein als gedacht. Na ja. +12V | 5k 9.47msec | +----+ TLE4905 --+--| |--10k--+---|-\ +----+ | | >--(M)-- GND | +-|+/ CD4538 | | L272 | | +----+ | | Signal --10k--+--| |--10k--(-+ | +----+ | | 10nF 2.08msec 1u 1u | | | GND GND Bloss ist diese Schaltung auch noch ohne Filterung, man muß die 1u Kondenstaoren an die Tragheit des Tachomotors bzw. der Tachonadel anpassen.
Diese Schaltung sieht ja schon sehr übersichtlich aus, was wohl auch daran liegt, dass die passiven Bauelement für die IC's fehlen! Liegt an der Schaltung das Signal des TLE4905 an?
Thomas P. schrieb: > Diese Schaltung sieht ja schon sehr übersichtlich aus, was wohl auch > daran liegt, dass die passiven Bauelement für die IC's fehlen! > > Liegt an der Schaltung das Signal des TLE4905 an? Ist doch oben links angedeutet! MaWin und die Helden, ja ja. Also meinereiner kann einen Frequenz-Multiplizierer beisteuern. Ja, der hat bereits Watchdog und Stillstandszeit-Erkennung onboard und das wichigste: Er wäre fertig. Also Eingangsfrequenz mal Faktor float x gleich Ausgangsfrequenz Wenn dir das helfen würde. Ich habe momentan nicht die Übersicht über dein Projekt, lese nur so a bisserl mit.
MaWins Schaltung ist schon schön schon, setzt aber einen Motor von hoher Qualität voraus, der auch bei kleiner Gleichspannung zuverlässig anläuft, deswegen waren wir ja ursprünglich bei einer PWM gelandet. (Kann man aber mögl. über die Verstärkung des L272 hinkriegen) Fügt man allerdings jetzt einen PWM Modulator ( Dreieckgenerator und Komparator ) hinzu, dann sieht das ganze recht gut aus und könnte auch mit etas mieseren Motoren gehen. Ok, die Tiefpässe (Integratoren) muss man natürlich per Ausprobieren hinbiegen und da ist noch ein bisschen andere Detailarbeit zu leisten. Das ist aber für einen MC-unerfahrenen einfacher hinzukriegen, als in einem C-Programm rumzuwühlen, oder Assembler, Gott behüte :P Vermutlich ist es auch störsicherer als ein MC ohne 'hardened' Software und Hardware.
Guten Morgen, @Abdul Das hört sich schon dehr gut an! Kann ich für dein Programm die Schaltung mit dem ATtiny12 von MaWin nutzen? Die Analoge Lösung wird mit dem PWM Generator wird wohl auch gehen. Ich werde mir mal beide Varianten näher ansehen.
Du kannst von mir einen fertig programmierten Controller bekommen. Es ist kein AVR, aber das kann dir ja dann egal sein. Du baust einfach einen 8-pinner in die Schaltung. Damit ein hängender Tacho losgebrochen wird, gibt der Controller nach dem Einschalten kurz eine hohe Frequenz raus. Läßt sich alles vorab einstellen über Konstanten. Wie gesagt, das Ding wandelt eine Eingangsfrequenz per Multiplikation in eine Ausgangsfrequenz. Kann natürlich auch ein Teiler sein. Mehr macht er nicht (abgesehen von ein paar Feinheiten)! Ist eigentlich für Tachoanpassungen gedacht, z.B. Meilentacho. Das das Teil jemals hängengeblieben ist, konnte ich nie beobachten. Von den 100 verkauften, ist bislang einer komplett ausgefallen. Warum auch immer. Es läuft intern auch ein Watchdog mit. Wobei mir was gerade auffällt: Ist es vorgeschrieben, das ein Tacho auch ohne Stromversorgung funktioniert? Aber dann würden ja die ganzen Mäusekinos auch nicht zugelassen. Das wundert mich doch.
Ich denke nicht, denn heute wird ja kaum noch ein Tacho mechanisch Betrieben! Ja das Angebot würde ich gern annehmen. Brauchst du denn noch genaue Daten?
> MaWins Schaltung ist schon schön schon, setzt aber einen Motor von hoher > Qualität voraus, der auch bei kleiner Gleichspannung zuverlässig > anläuft, deswegen waren wir ja ursprünglich bei einer PWM gelandet. Schau noch mal genau hin, die Schaltung erzeugt eine PWM... der L272 ist im Komparator-Schaltbetrieb, und, weil sie regelt, erzeugt sie auf jeden Fall volles Anlaufmoment. Nur eventuell nicht gut kompensiert, die Kompensation hatte ich ja als Anpassungsproblem stehenlassen.
Thomas P. schrieb: > Ich denke nicht, denn heute wird ja kaum noch ein Tacho mechanisch > Betrieben! > > Ja das Angebot würde ich gern annehmen. Brauchst du denn noch genaue > Daten? Denk das erstmal komplett durch. Reicht dir das IC? Wie gesagt, ich habe nicht dein ganzes Projekt im Kopf. Danach kannste mir dann ne PM schicken. Ich brauche dann den Multiplikationsfaktor und ob das Ding nach dem Einschalten am Ausgang eine <welche> Frequenz ausgeben soll. I/O ist 5V.
MaWin schrieb: > Schau noch mal genau hin, die Schaltung erzeugt eine PWM... > der L272 ist im Komparator-Schaltbetrieb, und, weil sie regelt, erzeugt > sie auf jeden Fall volles Anlaufmoment. Ahh, cool. Ich kenne den L272 nicht so und dachte, das wäre evtl. ein Leistungs Opamp mit interner Gain Einstellung. Das sieht dann doch sehr gut aus. Nochn bisschen Motor Entstörung und die üblichen Kfz Massnahmen , fertig. Justiert wird über die Zeitkonstante der Monoflops, denke ich.
@MaWin Kannst du mir sagen, wie der CD4538 richtig verkabelt wird?
Womit speziell ? Ich hoffe, du hast das Datenblatt von NatSemi, da ist auch eine Wahrheitstabelle bei, die sehr nützlich ist. Da es zwei Monoflops in einem Gehäuse sind, beschränken wir uns mal auf das erste: An Pin 1 und 2 wird das RC-Zeitglied angeschlossen. MaWin hat die benötigten Zeiten ja schon in der Schaltung erwähnt. Die Zeit wird ausgerechnet über die Formel auf der ersten Seite oben rechts: PW = R*C , in Sekunden, Ohm und Farad. Beachte bitte, das R nicht kleiner als 5k sein darf. Bau also einen Trimmer ein, mit 5k6 in Reihe und wähle C für die entsprechende Zeit. Das Ausrechnen überlasse ich dir, keine Lust dazu. Nehmen wir nun an, wir wollen die steigende Flanke des Sensors als Trigger nehmen. Pin 4 an den Sensor, Pin 5 und Pin 3 werden fest auf high gelegt. Dann liefert jede steigende Flanke des Sensorsignals einen positiven Puls mit PW-Zeit an Pin 6 und einen negativen Puls an Pin 7.
Angehängte Dateien:
-

Tachoregelung.png
5,7 KB
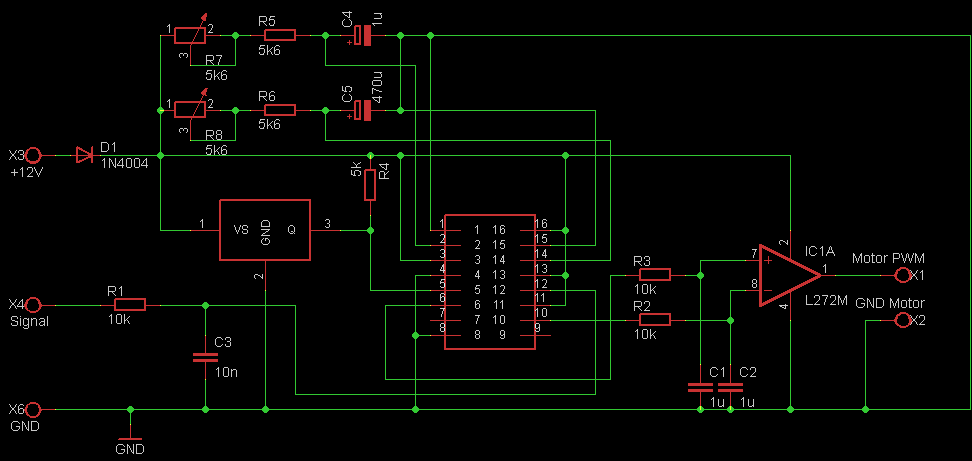
So Leute, hab mich mal an den Schaltplan gemacht. Ich hoffe da sind nicht allzu viele Fehler drin. Guckt euch das bitte mal an.
Hallo, Warum eigentlich keine Schaltung mit dem CD4046. Phasenvergleicher nutzen, danach ein RC und dann der L272. Mfg Michael
Wenn du bei dir Minimallösung für die Versorgungsspannung bleiben willst, dann mach wenigstens die Diode antiparallel zum Spannungsreglereingang und an der jetzigen Position der Diode einen Widerstand von ca. 10 Ohm. Und die Diode dann gleich als Zenerdiode. Ansonsten killt es die Schaltung irgendwann beim Starten des Motors. Beim 78L05 sollte mindestens jeweils 100nF am Ein- und Ausgang sein! Was die 4046 angeht: Ich glaube das Problem wird der große Frequenzbereich. Sicherlich gibts in der Schaltung noch mehr Baustellen. Ne Sicherung am Ausgang wäre vielleicht auch nicht schlecht.
Entstördrossel (wie in Autoradios) in Reihe zur D1. Der Wert von C5 kann nicht stimmen, viel zu gross. Schalte einen Elko a la 470uF über die Betriebsspannung, z.B. nahe am L272. Schalte eine 15 Volt Zenerdiode in Sperrrichtung parallel zu ihm als Schutzdiode. Sieht sonst schon ganz gut aus. Wo geht die Leitung von Pin 1 des 4538 denn noch hin? C1 und C2 sind erstmal geraten, bereite dich darauf vor, das da auch evtl. andere Werte günstiger sind. Mir kommt rein gefühlsmässig auch C4 zu gross vor. Setzt mal bitte den R mit 7,5 K an und rechne C für die 2 bzw 9 mSec aus. Am besten treibt du den Tachowellenmotor über ne Drossel an und schaltest noch einen C (10n -47n) parallel zum Motor. Michael schrieb: > Warum eigentlich keine Schaltung mit dem CD4046. Die Schaltung soll bis 0 Hz herunter laufen und die Tachofrequenz ist nicht gleich der Sensorfrequenz.
Oh man, irgendwie hatte ich heute ein Brett vor'm Kopf! Ich hab die einfachsten Sachen, wie den Schutz der Elektronik im Kfz vergessen! Auf die Drossel usw hätte ich auch allein kommen müssen! C4 und C5 sind beide falsch, ich hab mit s statt mit ms gerechnet! Ich werde morgen mal alles in den Schaltplan einfügen! Nochmals vielen dank für eure Hilfe!
> Ich werde morgen mal alles in den Schaltplan einfügen! Man sollte noch mal einen Blick auf das Eingangssignal vom vorhandenen Sensor richten. Der CD4538 akzeptiert typischerweise bei 12V Versorgungsspannung alles unter 5.4V als low und alles über 6.6V als high, was gut zu deinem Sensor passen würde wenn der wirklich 0V/9V liefern würde. Aber das würde ich noch mal nachmessen. Da der L272 ziemlich ruckartig Strom zieht, und der CD4538 davon gestört werden könnte, würde ich in die VDD Zuleitung zum CD4538 noch einen Filter einbauen: +12V --1k--+-- VCC CD4538 | 100uF | GND
Angehängte Dateien:
-

Schaltung_PMSM.PNG
53 KB
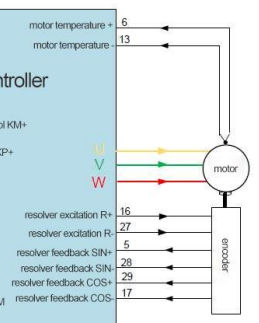
Hallo in die Runde, sorry wenn ich hier die alten Themen hoch hole, aber ich denke meine Problematik passt hier ganz gut rein. Und zwar hab ich ein alten Bus der mit einem neuen E-Motor elektifiziert wird und es soll glein eine Hinterachse mit Motor verbaut werden. Aktuell wird über das Getriebe die Tachowelle angetrieben, welche aber dann weg fällt. @Thomas: Hast du deine Schaltung mit Motor zum Laufen bekommen? Könnte man das auch für meinen E-Motor adaptieren bzw vielleicht gleich die Signale vom Motor dafür verwenden? Anbei den Anschlüsse vom PermanentMagnetSync Motor und Controller. Danke schon Gruß Henry
Wenn da kein variables Getriebe mit mehreren Gängen verbaut ist, dann kannst du entweder eine der Motorphasen anzapfen oder den Resolver, wobei es egal ist, ob du die SIN oder die COS Signale benutzt. Das differentielle Signal aus dem Resolver lässt sich gut mit einem Komparator digitalisieren.
Hi, nein, ich hab hier nur eine feste Übersetzung und nur einen Gang bzw noch den Rückwärtsgang. Gibt es da vielleicht schon fertige Module oder Tachos die mit dem SIN signal arbeiten können?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.