Hallo zusammen, Ich habe mir schon ein paarmal Gedanken über die Elektronik von Elektroautos gemacht und mich versucht im Internet zu informieren. Irgendwie findet man da aber kaum richtig konkrete Angaben (oder ich habe nicht die richtigen Suchbegriffe). Nehmen wir mal den Tesla Roadster als Beispiel. Motor soll da ein Asynchronmotor sein. Ich nehme mal an ein Kurzschlussläufer, oder doch nicht? Warum nimmt man da keine BLDC, hätten die nicht einen besseren Wirkungsgrad? Der Tesla soll ja um die 200kW Leistung haben, und irgendwo habe ich mal was von 375V gelesen. Das wären also ca. 530A. Und genau hier frage ich mich, wie die diesen Strom unter Kontrolle haben. Ich meine, wenn hier einer ein BLDC-Regler mit 200A bauen will wird er ausgelacht, aber Tesla kriegt es ja anscheinend hin. Was haben die da für ein Konzept? Sehr sehr viele Mosfets oder IGBTs auf vielen grossen Platinen mit grossen Kühlkörpern verteilt? Oder kommt hier gar keine Leiterplattentechnik mehr zum Einsatz? Ich würde zu gerne mal Fotos von solchen Reglern (Innenleben) sehen. Und dann nehme ich an, die arbeiten mit Raumzeigermodulation? Was für PWM-Frequenzen kommen da wohl zum Einsatz? Kennt sich vielleicht jemand von euch aus mit diesem Thema? Am meisten interessiert mich der Regler, also vom Konzept bis zur konkreten Realisierung. Grüsse Urban
Urban B. schrieb: > Der Tesla soll ja um die 200kW Leistung haben Dauerleistung oder Spitzenleistung für 5 ns? Dann hätten sie nichtmal gelogen. Erinnert mich irgendwie an PMPO bei Computerboxen...
Urban B. schrieb: > aber Tesla > kriegt es ja anscheinend hin. Ja, die sind fähig einen Frequenzumrichter zu kaufen.
Hm? Wo ist das Problem mit IGBTs 560 A zu schalten?! Wenn hier jemand "ausgelacht wird", dann eher weil Fragen gestellt werden wie: Ich bin neu in der Elektrotechnik und möchte das oben genannte tun... Wieso ist denn das so unklar mit den Elektroautos... Umrichter in Betrieben steuern/regeln Motoren im MWatt Bereich und Züge und Straßenbahnen haben auch Umrichter an Bord... klar etwas anders ist das schon im KFZ (Platz/Gewicht)... Aber kein Hexenwerk....
@ Urban B. (kami89) >was von 375V gelesen. Das wären also ca. 530A. Und genau hier frage ich >mich, wie die diesen Strom unter Kontrolle haben. %30A bei 375VDC sind für leistungselektronik bestenfalls Mittelklasse. > Ich meine, wenn hier >einer ein BLDC-Regler mit 200A bauen will wird er ausgelacht, Logisch, weil die meisten dieser Leute gerade mal das ohmsche Gesetz beherrschen. bei Tsal arbeiten Profis, die wissen was sie tun. Und ob die die Leistungselektronik komplett selber machen ist auch noch eine Frage. Ich schätze eher nicht. >hier gar keine Leiterplattentechnik mehr zum Einsatz? Eher nicht, die Leistungsschalter sind in speziellen Gehäusen drin, die direkt auf passene Kühlkörper geschraubt werden. Hat mit normalen Gehäusen wie TO220, TO247 etc. nix zu tun. Eher sowas hier. http://www.semikron.com/skcompub/de/semipack_complete_data_sheet.pdf Bzw. noch moderner und kompakter. MFG Falk
Das sind ja auch keine Hobbybastler, die ihre ersten Gehversuchte mit der Leistungselektronik machen, sondern Profis. Die Transistoren stecken da nicht im TO220-Gehäuse, sondern in Modulen, die die Verlustleistung problemlos abführen können. Und der Strom wird natürlich nicht mehr über herkömmliche Leiterplatten geführt, sondern über Kupferplatten und Stromschienen. Da sind Ströme im kA-Bereich überhaupt kein Problem. Üblicherweise werden in diesem Leistungsbereich IGBT verwendet. In der Industrie ist die Technik schon seit Jahrzehnten bewährt. Die Elektroautobauer schauen sich es auch dort ab, mit den nötigen Anpassungen natürlich.
huii, das geht ja schnell :-) Ja, dass es geht und dass es in anderen Anwendungen noch sehr viel grössere Ströme gibt ist mir schon klar. Aber eben welche Technik da zum Einsatz kommt war vorallem die grosse Frage. Weil halt eben Leiterplatten nicht allzu grosse Ströme führen können. Meint ihr echt die kaufen die Regler fix-fertig ein, einfach bisschen Plug&Play? :-) Das müssten ja schon Regler sein, die genau auf diesen Anwendungsbereich zugeschnitten sind, und da gibts noch noch nicht allzu viel fertiges oder? Hintergrund der Frage ist eigentlich, dass mein Cousin (Bachelor Maschinenbau) schon länger im Hinterkopf hat, einen Elektro-Kart zu bauen. Und weil ich Elektronik-Begeisterter (und mittlerweile auch ET Student) bin, diskutierten wir schon ein paarmal darüber. Allerdings hätte ich nichtmal einen Ansatz, wie man sowas selber bauen könnte. Da wollte ich erstmal in Erfahrung bringen wie die "Grossen" denn das so machen. Und jetzt bitte nicht auslachen weil ein "Unwissender" wieder "Unmögliches" vor hat, das sind keine Pläne sondern nur Ideen, die mal verfolgt werden sollen. Nach dem Studium könnte das dann vielleicht realisierbar sein :-) Kennt vielleicht jemand Anbieter von solchen Reglern und Motoren? Schöne Fotos wären mal schön, damit ich mir darunter auch was vorstellen kann :-) mfg
Urban B. schrieb: > Und jetzt bitte nicht auslachen weil ein "Unwissender" wieder Laß sie ruhig lachen. Irgend einen kleinen Spaß müssen die Zugpferde der Elektronikindustrie doch haben ;-)
Wollte noch was anhängen, Uhu kam mir aber zuvor :-) Und diese fertigen Leistungs-Module, die haben noch keine Intelligenz drin, oder? Also Kann man die mit einem eigenen uC mit einer Raumzeigermodulation ansteuern? Welche PWM-Frequenzen darf man da noch einsetzten bei derart grossen Leistungen? Die Verlustleistung hängt ja auch ein Stück weit von der Ansteuerungsfrequenz ab. @Uhu Naja, ich wollte jetzt halt schonmal im Vorherein klarstellen wie die Lage ist, um eben genau solche Kommentare zu vermeiden, ich hoffe das klappt :-) @Falk Brunner Sehe ich das richtig, dass das genannte Modul nur bis 500Hz angesteuert werden kann? Damit kann man ja irgendwie nicht viel angangen nehme ich mal an.
Die Leistungselektronik hatte man schon früh im Griff, vielleicht 1930 mit steuerbaren Quecksilber-Thyratronen in E-Loks. So alt ist die Phasenanschnittsteuerung. Heute haben die eher suppentellergroße Thyristoren. 1975 sah ich im TK-Bereich auch mal einen ordentlichen Wechselrichter, der eine Knotenvermittlungsstelle aus den Blei-Akkus mit 60kW (60V, 1000A) speist. Silizium, sah damals schon topmodern aus. Angewandte Regelungstechnik auch. Ich staune heute noch über einen Schallplatten-Schneideapparat für einen Schallplattenhersteller, der 1954 mit Röhrentechnik in der Funkschau abgebildet war. Mit Schaltplan, mehreren Motoren, und Differentialgetriebe (wie im Auto) zur Drehzahlregelung. Nicht viel schlechter, als man es heute auch kann. Man machte Lageregelung und Geschwindigkeitsregelung schon exakt mit Röhrentechnik. Mit Hilfe von Regelungstechnik komprimierte man die Schallplattenrillen dichter aneinander, als wenn sie natürlich verlaufen. Etwa auf 60%. Gab mehr Spielzeit pro LP. Die Unsymmetrie (Eierung) je Plattenumdrehung liegt im Subschallbereich, und stört nicht. Das alles wußte ich vor 3 Jahren gar nicht, obwohl ich heute Ü50 bin. Aber interessant.
Okay danke schonmal für die Antworten! Man stelle sich mal folgenden Aufbau vor: - 3 Stück IGBT Halbbrücken-Module (ohne Treiber, ohne Logik) - IGBT-Module mit Stromschienen verbunden - Treiber (mit Hardware-dead-time zur Sicherheit) direkt an die Module, - Optisch getrennte Treibereingänge - Mikrocontroller um die Treiber anzusteuern Scheint mir irgendwie ein bisschen einfach, dieser Aufbau ;-) Das kann doch nicht funktionieren, was fehlt da noch alles? Die IGBTs haben ja relativ grosse Ausschaltverluste, wäre eine gescheite Raumzeigermodulation trotzdem problemlos möglich? Kann das sein dass man eine IGBT-Halbbrücke für ca. 200 Euro bekommt? Ist irgendwie ja nicht gerade teuer in Anbetracht der Schaltleistung. Und dann lese ich auch was von Regelungen. Was muss denn da genau geregelt werden? Frequenzumrichter geben ja das Drehfeld eigentlich ohne Rücksicht auf den Motor vor (ausgenommen Überlasterkennung usw.) oder täusche ich mich da?
@ Urban B. (kami89) >Sehe ich das richtig, dass das genannte Modul nur bis 500Hz angesteuert >werden kann? Keine Ahnung, es war nur ein ALLGEMEINES Beispiel für Module, vor allem das Aussehen. Was dort drinsteckt (Thyristoren oder IGBTs) ist eine andere Frage. >- 3 Stück IGBT Halbbrücken-Module (ohne Treiber, ohne Logik) >- IGBT-Module mit Stromschienen verbunden >- Treiber (mit Hardware-dead-time zur Sicherheit) direkt an die Module, >- Optisch getrennte Treibereingänge >- Mikrocontroller um die Treiber anzusteuern Im Prinzip OK. >Scheint mir irgendwie ein bisschen einfach, dieser Aufbau ;-) >Das kann doch nicht funktionieren, was fehlt da noch alles? Des know How um die bösen Fallen ;-) >Die IGBTs haben ja relativ grosse Ausschaltverluste, wäre eine gescheite >Raumzeigermodulation trotzdem problemlos möglich? Keine Ahnung. >Kann das sein dass man eine IGBT-Halbbrücke für ca. 200 Euro bekommt? >Ist irgendwie ja nicht gerade teuer in Anbetracht der Schaltleistung. IGBT ist nicht IGBT? Wieviel Strom/Spannung? >täusche ich mich da? Du täuschst dich. MFG Falk
Falk Brunner schrieb: > Keine Ahnung, es war nur ein ALLGEMEINES Beispiel für Module, vor allem > das Aussehen. Was dort drinsteckt (Thyristoren oder IGBTs) ist eine > andere Frage. Ach so, alles klar. > Des know How um die bösen Fallen ;-) Kennst du zufällig solche Fallen? > IGBT ist nicht IGBT? Wieviel Strom/Spannung? Naja, halt eben für diesen Anwendungsbereich. Für einen (starken :-] ) Kart vielleicht 300V / 300A. > Du täuschst dich. Kannst du mich aufklären? Dass man für den Drehzahl-Sollwert eine Regelung braucht ist eigentlich klar, damit man nicht einfach von Null auf Vollgas innert einer Zehntelsekunde vorgeben kann, da wird der Motor kaum mitkommen. Aber das wär ja eine ziemlich einfache Regelung würde ich meinen, das kann doch nicht das Problem sein. mfg
Urban B. schrieb: > Und dann lese ich auch was von Regelungen. Was muss denn da genau > geregelt werden? Na, Regelung der Beschleunigung gegenüber unterschiedlichen Lasten (je nach Masse/Beladung/Geschwindigkeit/Gripp usw.). Man will ja keine wertvolle Energie verschwenden. Die Bremsenergie soll ja auch zurück gewonnen werden. Da gibts reichlich zu regeln.
Michael S. schrieb: > Urban B. schrieb: >> Und dann lese ich auch was von Regelungen. Was muss denn da genau >> geregelt werden? > > Na, Regelung der Beschleunigung gegenüber unterschiedlichen Lasten > (je nach Masse/Beladung/Geschwindigkeit/Gripp usw.). Man will ja > keine wertvolle Energie verschwenden. Die Bremsenergie soll ja auch > zurück gewonnen werden. Da gibts reichlich zu regeln. Ja stimmt, habe vergessen zu erwähnen dass es mir nur um den nackten Motorregler geht, ohne Energierückgewinnung. Und wenn wir dann auch noch von einem Regler für einen Kart sprechen, fallen auch Tranktionskontrolle usw. weg, sowas hat ein anständiger Kart nicht :-) Dann sehe ich auch keine Regelung mehr, ausser halt eben eine Unterdrückung von sprunghaften Sollwertänderungen. Vor dem Erstellen dieses Themas sah ich es als nahezu unmöglich an, als Privatperson einen solchen Regler zu bauen. Jetzt sieht es irgendwie genau anders aus xD Mit den genannten IGBT-Modulen sieht das Ganze vorhaben irgendwie gar nicht mehr so kompliziert aus, aber ich vermute mal da täusche ich mich :-)
http://de.farnell.com/fuji-electric/6mbi300v-120-50/igbt-6-pk-v-ser-300a-1200v-m629/dp/2060195?Ntt=2060195 Sieht interessant aus, meint ihr sowas wäre geeignet? Ich frage mich aber immernoch mit was für einer Frequenz man die ansteuern kann. Scheint nicht so einfach zu sein, sowas aus dem Datenblatt abzuleiten. Gibts hier niemand, der bereits in diesem Bereich tätig war, beruflich oder privat? Ich meine, bisher wurde ja nur darüber spekuliert wie die Elektoauto-Hersteller die Regler realisieren. mfg Urban
In den meisten Umrichtern steckt etwas so ähnlich wie das hier http://www.infineon.com/dgdl/Infineon+-+Product+Brief+-+HybridPACK™2.pdf?folderId=db3a304412b407950112b408e8c90004&fileId=db3a3043353fdc16013557f17ce67b60
Als Entwickler traegt man am Anfang kuebelweise verbranntes Silizium in den Muell. Wenn man's dann mal drauf hat steckt man nur noch wie Lego zusammen.
Urban B. schrieb: > Motor soll da ein Asynchronmotor sein. Ich nehme mal an ein > Kurzschlussläufer, oder doch nicht? Warum nimmt man da keine BLDC, > hätten die nicht einen besseren Wirkungsgrad? Wohl wegen der Gefahr des "außer-Tritt-Fallens". BLDC bekommen als Synchronmaschinen Probleme, wenn die Rotordrehzahl nicht mehr mit dem Drehfeld zusammenpasst, dieses muss also nachgeregelt werden. Bei Asynchronmaschinen reicht es, eine Drehzahl vorzugeben und der Motor versucht dem zu folgen.
Tesla wird schon Mehrphasen Motore mit Hallsensoren benutzen, weil das heutzutage Stand der Technik ist. Zumm Anlaufen ist ein einfacher Frequenzumrichter ohne Rückmeldung nicht gut zu gebrauchen. Sobald der Motor angelaufen ist, ist FOV, SVM oder Sinus kein Problem mehr. Urban B. schrieb: > Das wären also ca. 530A. Und genau hier frage ich > mich, wie die diesen Strom unter Kontrolle haben. Jedes Golf Caddy arbeitet mit Controllern, die mal locker 600-700 Ampere wegstecken. Zugegeben, da stecken noch DC Motore mit Bürsten drin, aber diese Ströme sind mit MOSFets oder IGBTs einfach zu handeln. Entscheidend ist eben der mechanische Aufbau und die Sicherheitsschaltungen. Pico Oschi schrieb: > Als Entwickler traegt man am Anfang kuebelweise verbranntes Silizium in > den Muell. Wenn man's dann mal drauf hat steckt man nur noch wie Lego > zusammen. Davon kann ich ein Liedchen singen. Dutzende von MOSFets pflastern meinen Weg :D Urban B. schrieb: > Man stelle sich mal folgenden Aufbau vor: > - 3 Stück IGBT Halbbrücken-Module (ohne Treiber, ohne Logik) > - IGBT-Module mit Stromschienen verbunden > - Treiber (mit Hardware-dead-time zur Sicherheit) direkt an die Module, > - Optisch getrennte Treibereingänge > - Mikrocontroller um die Treiber anzusteuern Theoretisch reicht das. Allerdings sind ca. 70% der Bauteile nicht fürs eigentliche Steuern und Regeln sondern für Sicherheitssachen. Strommessung, Motorblockade, Endstufendefekte usw. müssen ja alle überwacht werden, denn es handelt sich um sicherheitskritische Baugruppen. In der Controllerware ist es das gleiche. Der eigentliche Algorithmus is easy, aber die Sicherheit belegt ca. 70-80% der Codegrösse.
Urban B. schrieb: > http://de.farnell.com/fuji-electric/6mbi300v-120-5... Wozu soll denn das eine Brückenschaltung sein? Der Motor dreht doch nur in eine Richtung, so wie jeder Verbrennungsmotor, oder? Da würde dann ein einfacher Leistungs-Mos-Fet(auch mehrere parallel) reichen.
Michael S. schrieb: > Der Motor dreht doch nur in eine Richtung, so wie jeder > Verbrennungsmotor, oder? Manchmal will man auch rückwärts fahren. Matthias Sch. schrieb: > Tesla wird schon Mehrphasen Motore mit Hallsensoren benutzen, weil das > heutzutage Stand der Technik ist. Zumm Anlaufen ist ein einfacher > Frequenzumrichter ohne Rückmeldung nicht gut zu gebrauchen. Nein, wie bereits vom TS geschrieben nutzt der Roadster einen Asynchronmotor. Bei dem man gruundsätzlich auch gleich auf das Feedback verzichten kann.
Hier sieht man recht schön das Tacho Feedback am Tesla Motor, übrigens wie vermutet ein 3 Phasen Motor: http://auto.howstuffworks.com/tesla-roadster1.htm
Die meisten 3phasigen Motoren sind Asynchronmotoren... Und zum Rückwärtsfahren benutzt man das Getriebe. Spielt aber keine Rolle weil der Aufwand fürs elektronische Kommutieren eines 3phasigen Motors für beide Richtungen identisch ist.
Ben _ schrieb: > Und zum Rückwärtsfahren benutzt man das Getriebe. Spielt aber keine > Rolle weil der Aufwand fürs elektronische Kommutieren eines 3phasigen > Motors für beide Richtungen identisch ist. Nur, das man kaum fünf bis sechs Rückwärtsgänge benötigt, wenn man den E-Motor in beide Drehrichtung ansteuern kann. Entweder man nutzt die Möglichkeit des E-Antriebs, oder man konstruiert das Getriebe so, das es optimal passt, bei minimalsten technischem Aufwand.
Michael S. schrieb: > Nur, das man kaum fünf bis sechs Rückwärtsgänge benötigt, wenn > man den E-Motor in beide Drehrichtung ansteuern kann. Das Getriebe braucht einen Gang weniger, das spart Gewicht und das Problem mit den Rückwärtsgängen läßt sich per Steuerung lösen. > Entweder man nutzt die Möglichkeit des E-Antriebs, oder man > konstruiert das Getriebe so, das es optimal passt, eben. > bei minimalsten technischem Aufwand. Ja gibts denn noch einen minimalernen, als den minimalen Aufwand?
Urban B. schrieb: > Man stelle sich mal folgenden Aufbau vor: > - 3 Stück IGBT Halbbrücken-Module (ohne Treiber, ohne Logik) > - IGBT-Module mit Stromschienen verbunden > - Treiber (mit Hardware-dead-time zur Sicherheit) direkt an die Module, > - Optisch getrennte Treibereingänge > - Mikrocontroller um die Treiber anzusteuern Da fehlen jetzt noch so viele Details, dass ich gar nicht wüsste, wo man mit Ergänzungen anfangen sollte. Strommessung- und Begrenzung, Temperaturmessung, überhaupt die Auslegung der Kühlung, eine Spannungsmessung und so weiter. Und es gibt wirklich viele versteckte Fallen, die erst in der Serie auffallen würden. Man muss z.B. beachten, dass der realisierbare Ausgangsstrom bei niedrigen Drehzahlen sehr viel geringer ist. Urban B. schrieb: > Und dann lese ich auch was von Regelungen. Was muss denn da genau > geregelt werden? Frequenzumrichter geben ja das Drehfeld eigentlich ohne > Rücksicht auf den Motor vor (ausgenommen Überlasterkennung usw.) oder > täusche ich mich da? In einem ganz einfachen Umrichter wirst du vielleicht noch U/f-Steuerung finden, aber selbst dann meistens nicht in seiner Reinform. In einem Wechselrichter für Elektroautos wird mit Sicherheit mit Vektorregelung gearbeitet.
Ein bisschen Kommentar: - eigentlich braucht ein E-Auto gar kein Getriebe. Manchmal ist eins drin, weil es eine konvertierte Verbrennerkutsche ist, und man den Umbauaufwand minimieren wollte. Manchmal ist eins drin, weil man den Aufwand scheut, große Drehzahlen und große Drehmomente handeln zu können. Aber grundsätzlich geht es sehr gut ohne, wenn es gut gemacht ist. - einen E-Kart würde ich mal mit 24 Volt, 400 Ampere peak ansetzen. Mehr als 2 Batterien sind problematisch (Gewicht, Größe, Balancing)
Ben _ schrieb: > Und zum Rückwärtsfahren benutzt man das Getriebe. Spielt aber keine > Rolle weil der Aufwand fürs elektronische Kommutieren eines 3phasigen > Motors für beide Richtungen identisch ist. Warum genau sollte man ein Wendegetriebe einbauen? Das Getriebe des Roadster hat ganz genau einen Gang. Und auch bei anderen Elektroautos wirst du keinen gesonderten Rückwärtsgang finden. Bringt nur Wirkungsgradverluste, Gewicht und Verschleiß. Der Artikel ist eher eine schlechte Quelle, denn auch die beiden Vorwärtsgänge wurden verworfen.
Pink Shell schrieb: > eigentlich braucht ein E-Auto gar kein Getriebe. Manchmal ist eins > drin, weil es eine konvertierte Verbrennerkutsche ist, und man den > Umbauaufwand minimieren wollte. Genau. Getriebe sind eher kontraproduktiv, da sie unnötige Verluste erzeugen und Wartung brauchen. Ich hab dem Artikel das 3-Gang Getriebe auch nicht abgenommen. E-Karts, Caddies usw. werden per Umpoler zum Rückwärtsfahren gebracht, moderne Motore über die Kommutierung/Drehfeld. Pink Shell schrieb: > einen E-Kart würde ich mal mit 24 Volt, 400 Ampere peak ansetzen. Mehr > als 2 Batterien sind problematisch (Gewicht, Größe, Balancing) Bei den 'kleinen' E-Karts, Caddies und City Cars hat sich 48 Volt durchgesetzt, weil die benötigten Ströme dann kleiner werden. Die Motore liegen so im 5-12 kW Bereich. Ein paar fahren mit 60 bzw. 72 Volt.
Michael S. schrieb: > Ben _ schrieb: >> Und zum Rückwärtsfahren benutzt man das Getriebe. Spielt aber keine >> Rolle weil der Aufwand fürs elektronische Kommutieren eines 3phasigen >> Motors für beide Richtungen identisch ist. > > Nur, das man kaum fünf bis sechs Rückwärtsgänge benötigt, wenn > man den E-Motor in beide Drehrichtung ansteuern kann. > Entweder man nutzt die Möglichkeit des E-Antriebs, oder man > konstruiert das Getriebe so, das es optimal passt, bei minimalsten > technischem Aufwand. So, wie ich es gestern im Zeitungsartikel über den neuen Peugeot 3008 Hybrid4 las, hat der Elektroantrieb überhaupt kein Getriebe. Darum macht es sicher auch Spaß, elektrisch zu fahren. Straßenbahnen und E-Loks der Bahn haben auch kein Getriebe. Da reicht vorne in der Führerkabine ein kleines Poti. Mein Fiesta hat bereits auch nur noch ein elektrisches Gaspedal ohne mechanischen Drahtzug. Ist noch kein Elektroauto, aber gesteuert und geregelt wird schon woanders. Beim Peugeot wirkt der Elektroantrieb auf die Hinterachse, und der Diesel auf die Vorderachse. Man kann beide Antriebe separat benutzen. Beispielsweise im Stau nur elektrisch rollen. Oder für maximale Beschleunigung beide koppeln. Oder Allradantrieb im Winter im Gebirge. Ob der Prius ein Schaltgetriebe hat, weiß ich nicht genau. Ich meine, der läuft auf Antriebsseite rein elektrisch. So wie die meisten Dieselloks der Bahn. Sind fast immer dieselhydraulisch oder dieselelektrisch. Ist sicher dann angenehm zu fahren, sowas fährt ziemlich ruckfrei und mit konstanten Beschleunigungen. Mit ein Grund, warum ich in der Großstadt sehr gerne die Straßenbahn benutzte. Ein modernerer Bahntyp der Kölner U-Bahn machte mal im Fahrgastraum ziemlich laute und nervige PWM-Geräusche. Nur ein einzelner Hersteller. Vielleicht war sie billig. Wobei 10 Jahre ältere Bahnen mit Siemens-Technik wiederum geräuschlos und sanft liefen.
Ich halte ein Getriebe fuer sicherlich sinnvoll. Denn sonst muss das maximale Drehmoment viel hoeher sein. Eine 20%ige Steigung ist schon was rabiates fuer einen Wagen, hoch wie runter. Der Vergleich mit dem Zug, resp der Strassenbahn geht hier nicht, denn die muessen nie solche Steigungen bringen. Das maximale Drehmoment multipliziert mit der maximalen Drehzahl ist die maximale Leistung. Ein Getriebe erlaubt so das maximale Drehmoment kleiner zu halten, somit den kleineren Motor einzubauen. Der kleinere Motor hat auch weniger Verluste.
Angehängte Dateien:
-

HybridPack.png
42 KB
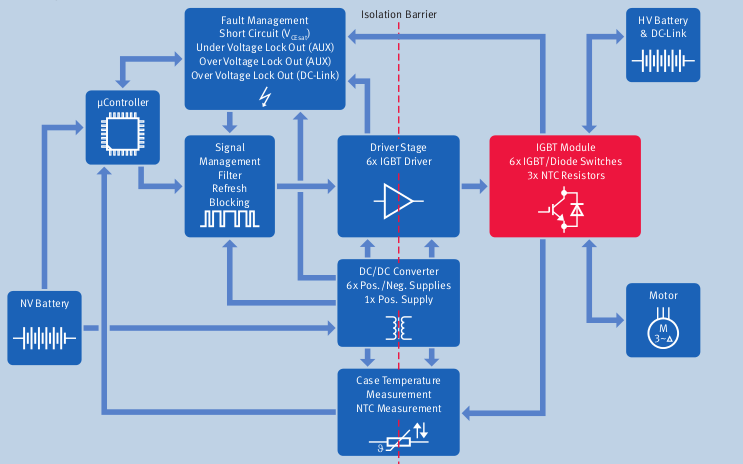
Vielen Dank für die vielen konstruktiven Antworten, damit hätte ich nicht gerechnet! Ich versuche mal auf die wichtigsten davon einzugehen. Alex Bürgel schrieb: > In den meisten Umrichtern steckt etwas so ähnlich wie das hier > http://www.infineon.com/dgdl/Infineon+-+Product+Brief+-+HybridPACK™2.pdf?folderId=db3a304412b407950112b408e8c90004&fileId=db3a3043353fdc16013557f17ce67b60 Sehr interessantes Produkt! Das Blockdiegramm gefällt mir sehr gut, ich habe mir mal erlaubt das noch an den Beitrag anzuhängen. Interessant wäre noch wie teuer das Ding sein soll, konnte (noch) keine Preise finden. Pico Oschi schrieb: > Als Entwickler traegt man am Anfang kuebelweise verbranntes Silizium in > den Muell. Wenn man's dann mal drauf hat steckt man nur noch wie Lego > zusammen. Das glaube ich dir, aber wenn man jetzt ein wie von Alex Bürgel vorgeschlagenes Modul und IGBT-Treiber mit integrierter Totzeit verwenden würde, denke ich sollte man das doch auch hinkriegen ohne grossartig Rauch zu produzieren. Wichtig ist halt, dass man bei stehendem Motor nicht 100% Leistung auf einen Schlag auf den Motor loslässt. vn nn schrieb: > Wohl wegen der Gefahr des "außer-Tritt-Fallens". BLDC bekommen als > Synchronmaschinen Probleme, wenn die Rotordrehzahl nicht mehr mit dem > Drehfeld zusammenpasst, dieses muss also nachgeregelt werden. BLDC-Motoren werden aber elektronisch kommutiert und nicht einfach mit einem sturen Drehfeld. Da zählt deine Argumentation dann nicht mehr. Nur der Anlauf ist etwas schwieriger, jedoch verwendet man bei grösseren BLDCs eh Hallsensoren, dann sollte das Anlaufen auch kein Problem mehr sein. Natürlich wäre der Entwicklungsaufwand bei BLDC-Reglern etwas höher als bei simplen Asynchronmotoren, aber wenn man mit BLDCs ein besseres Gewicht/Leistungs-Verhältnis haben würde, wäre doch der Zusatzaufwand unwichtig. Matthias Sch. schrieb: > Zumm Anlaufen ist ein einfacher Frequenzumrichter ohne Rückmeldung > nicht gut zu gebrauchen. Warum nicht? Das schöne am Asynchronmotor ist doch, dass es dem Rotor relativ egal ist wie schnell sich das Drehfeld dreht, und wie stark er belastet wird. Er passt dann halt einfach seine Drehzahl "automatisch" an. Matthias Sch. schrieb: > Theoretisch reicht das. Allerdings sind ca. 70% der Bauteile nicht fürs > eigentliche Steuern und Regeln sondern für Sicherheitssachen. > Strommessung, Motorblockade, Endstufendefekte usw. müssen ja alle > überwacht werden, denn es handelt sich um sicherheitskritische > Baugruppen. In der Controllerware ist es das gleiche. Der eigentliche > Algorithmus is easy, aber die Sicherheit belegt ca. 70-80% der > Codegrösse. Das ist ein interessanter Hinweis. Würde man aber sowas nur für sich selbst bauen, könnte man ja nur gerade die wichtigsten Sicherheitsfunktionen einbauen, und vieles weglassen. Dann würde das ganze Projekt schonmal ein grosses Stück schrumpfen. Man kann die Features ja auch noch nach und nach einbauen, nicht schon von Anfang an. Michael S. schrieb: > Wozu soll denn das eine Brückenschaltung sein? > Der Motor dreht doch nur in eine Richtung, so wie jeder > Verbrennungsmotor, oder? Da würde dann ein einfacher > Leistungs-Mos-Fet(auch mehrere parallel) reichen. Das gilt bei Gleichstommotoren, aber bei Drehstrommotoren müssen drei Phasen jeweils in beide Richtungen bestromt werden können. Ob der Motor auch noch rückwärts drehen soll ist dann nurnoch eine Software-Kleinigkeit. Mine Fields schrieb: > Da fehlen jetzt noch so viele Details, dass ich gar nicht wüsste, wo man > mit Ergänzungen anfangen sollte. Strommessung- und Begrenzung, > Temperaturmessung, überhaupt die Auslegung der Kühlung, eine > Spannungsmessung und so weiter. Und es gibt wirklich viele versteckte > Fallen, die erst in der Serie auffallen würden. Man muss z.B. beachten, > dass der realisierbare Ausgangsstrom bei niedrigen Drehzahlen sehr viel > geringer ist. Ja, dass die Details fehlen sollte ja klar sein ;-) Aber eine Temperatur- und Spannungsüberwachung halte ich für Kleinigkeiten im Vergleich zu den von mir erwähnten wesentlichen Punkten. Kühlung ist ein gutes Stichwort, aber ich denke mal das sollte doch auch nicht soooo eine Hexerei sein. Kühlwasserkreislauf mit Elektropumpe und Temperaturregelung. Dazu ein etwas grösserer Kühlkörper direkt an den IGBTs, damit die Kühlung nicht so schnell nachregeln muss. Die Frage mit der PWM-Frequenz konnte bisher leider noch niemend beantworten. Wäre schön wenn hier noch jemand weiterhelfen könnte. Vielleicht kennt auch noch jemand einen Link wo man E-Motoren für diesen Einsatzbereich begutachten könnte? Oder würde das schon eher unter Einzelanfertigung gehen? Grüsse Urban
Urban B. schrieb: > Ja, dass die Details fehlen sollte ja klar sein ;-) Aber eine > Temperatur- und Spannungsüberwachung halte ich für Kleinigkeiten im > Vergleich zu den von mir erwähnten wesentlichen Punkten. Kühlung ist ein > gutes Stichwort, aber ich denke mal das sollte doch auch nicht soooo > eine Hexerei sein. Kühlwasserkreislauf mit Elektropumpe und > Temperaturregelung. Dazu ein etwas grösserer Kühlkörper direkt an den > IGBTs, damit die Kühlung nicht so schnell nachregeln muss. Und da kommt der Punkt, an dem sich der Anfänger vom Profi unterscheidet. Man muss immer das Gesamte betrachten und nicht einzelne Punkte als "Kleinigkeiten" abtun, obwohl in diesen "Kleinigkeiten" meist das meiste Know-How steckt. Urban B. schrieb: > Die Frage mit der PWM-Frequenz konnte bisher leider noch niemend > beantworten. Wäre schön wenn hier noch jemand weiterhelfen könnte. Die dürfte im Bereich industrieller Umrichter liegen.
> Straßenbahnen und E-Loks der Bahn haben auch kein Getriebe. Doch, haben sie. Das hat zwar eine feste Untersetzung und kann nicht geschaltet werden, aber die Dinger haben keine Radnabenmotoren. Außerdem vergleichst Du Äpfel mit Bohnen. Bei der Straßenbahn und der E-Lok kommt der Strom aus der Oberleitung, aus der ich Strom entnehmen oder ihn beim Bremsen einspeisen kann. Ich brauch mir also auf dem Fahrzeug keine Sorgen darüber zu machen wo die Energie für den Antrieb herkommt oder wo ich sie speichere - ich kann mich allein auf den Antrieb selbst konzentrieren und brauche keine Energiespeicher mitschleppen. Ich hab beim Auto auch keine 2000 PS pro Achse und keine Linienzugbeeinflussung, die mir beim Bremsen auf einen bestimmten Punkt (zB. Halt in 3km) behilflich ist. Ich hab auch kein vollständig bekanntes Streckenprofil mit großen Abständen zwischen den Fahrzeugen - irgendein Idiot brummt einem doch immer quer vor den Kühler weil er's eilig hat. Die meisten Verbrennungsmotoren (ausgenommen große Schiffsdiesel) nehmen es krumm wenn sie in die falsche Richtung angetrieben werden. Beim normalen Auto-Motor springt da zB. schnell mal der Zahnriemen über weil die Spannrolle plötzlich lastseitig läuft. Bei jedem Mal Rückwärtsfahren einen Motorschaden riskieren? Nee - besser nicht. Also muß der Verbrennungsmotor fürs Rückwärtsfahren ausgekuppelt werden, braucht zusätzliche Teile. Meiner Meinung nach taugt diese Idee (Getriebe wie bei der Bahn bzw. Radnabenmotor) nur was für 100%-Elektroautos (zur Zeit natürlich voll öko größtenteils kohlekraftwerks-betrieben). Die sehe ich dann schon im Winter eingefroren auf dem Standstreifen stehen, aber das ist ein anderes Thema... > Die Frage mit der PWM-Frequenz konnte bisher leider noch niemend > beantworten. Wäre schön wenn hier noch jemand weiterhelfen könnte. Wenn ich einen derartigen Regler bauen müßte dann würde ich diese in der Fahrstufe zur Senkung der Schaltverluste ziemlich tief ansetzen. Vielleicht 100-200Hz. Die Rekuperation ist eine andere Sache, dabei muß ich den vom Fahrmotor erzeugten Saft wieder auf die Akkuspannung hochtransformieren. Das braucht dann mindestens eine (in der Fahrstufe nahezu unwirksame) Speicherdrossel und einige zehn kHz.
Ben _ schrieb: >> Die Frage mit der PWM-Frequenz konnte bisher leider noch niemend >> beantworten. Wäre schön wenn hier noch jemand weiterhelfen könnte. > Wenn ich einen derartigen Regler bauen müßte dann würde ich diese in der > Fahrstufe zur Senkung der Schaltverluste ziemlich tief ansetzen. > Vielleicht 100-200Hz. 100-200Hz PWM, aha! >>Das ist doch blödsinn! Da wird ja die Feld Frequenz höher sein, als die PWM!<< PWM bei BLDCs sollte um die 20-22kHz betragen, 1. damit man es nicht hört 2. Schaltverluste sind bei richtiger Wahl der Schalter ebenfalls gering 3. Induktivität vom Motor nicht vergessen, bei PWM 200Hz wirkt der Motor praktisch als Kurzschluss und bildet keine richtige Induktive Koppelung!
Noch ein kleiner Nachtrag von mir: Urban B. schrieb: > Naja, halt eben für diesen Anwendungsbereich. Für einen (starken :-] ) > Kart vielleicht 300V / 300A. Du willst doch nicht in Wirklichkeit 90kW in ein Kart blasen? Und einen 90kW BLDC oder "auch nur" Sinussteller für Asyn.Motore mit der Leistung "basteln" wird böse in die Hose gehen. 1. Brauchst du keine 90kW im Kart(wirst du auch niemals hinbekommen) 2. Würde ich erstmal einen gescheiten Wechselrichter im Bereich 500Watt entwickeln und realisieren(wird schon schwierig genug) 3. Ein Asyn.Motor mit 90kW (und selbstverständlich kompakt Motor) kostet nen vermögen. BLDC in der Grösse hab ich noch nicht aufm Markt frei erhältlich gesehen. Kurz und knapp, ein Sinnloses Thema, welches schon zig Leute versucht haben zu lösen, aber alle gescheitert sind. ICH würde als Anfangsprojekt mit wie gesagt, 500Watt anfangen und langsam aufsteigen. Denn die Probleme pro Watt gehen echt fast im Quadrat hoch. Spreche aus Erfahrung, weil ich ein E-Studium absolviere und genau sowas entwickel! Gruß BK
OK ich habe da mal ein bisschen auf Wikipedia gelesen. Industrielle Umrichter sollen laut Wikipedia mit 2kHz bis 20kHz PWM-Frequenz arbeiten. Beim Roadster müsste übrigens das elektrische Feld mit ungefähr 200Hz drehen wenn man das mit den Angaben auf Wikipedia mal ausrechnet. Also das mit dem Regler und dem Motor ist mit jetzt einigermassen klar geworden. Als nächstes würde mich mal die ganze Akku-Geschichte interessieren :-) Im Roadster sollen 6831 Zellen LiIon Akkus (Typ 18650, 3,7V) drinstecken, die eine Gesamtspannung von 375V erzeugen. Ein Akkupack enthält 9 in Serie und 69 parallel geschaltete Zellen. Es werden dann 11 dieser Packs in Serie geschalten. Ob und wie die Zellen überwacht werden konnte ich nirgens finden. Kann man da einfach auf den zwei Hauptleitungen Strom abzapfen bis die 375V unter ein gewisses Level fallen, oder muss jede Zelle oder wenigstens jedes Akkupack separat überwacht werden? Und beim Laden, kann man einfach auf die zwei Hauptleitungen einspeisen und darauf vertrauen dass sich die Zellen gleichmässig Laden, oder muss jede Zelle bzw. jedes Akkupack quasi einen eigenen Laderegler haben? mfg Urban NACHTRAG: @Bartek K. Ich habe extra geschrieben dass ich hier in diesem Thread nur in Erfahrung bringen und auch verstehen möchte, wie die "Grossen" E-Auto-Hersteller sowas realisieren. Im Internet findet man reichlich wenige solche Informationen finde ich. Das mit dem Kart war ja nur so ein Beispiel, ich habe extra dazugeschrieben dass es vielleicht irgendwann nach dem E-Studium damit was werden könnte, aber sicher nicht hier und jetzt. Übrigens sind 90kW für ein kart nicht unbedingt total unrealistisch viel. Schau dir mal Videos an von Karts die einen Hayabusa-Motor drauf haben (200PS), das sind Karts die richtig Spass machen, das sieht man den Fahrern an :-) Natürlich reichen auch 50kW, war ja nur ein Beispiel.
Urban B. schrieb: > Und beim Laden, kann man einfach auf die zwei Hauptleitungen einspeisen > und darauf vertrauen dass sich die Zellen gleichmässig Laden, oder muss > jede Zelle bzw. jedes Akkupack quasi einen eigenen Laderegler haben? http://www.kc-world.de/LiPo-Balancer.htm Soetwas in der Art ist es. Die Maximale Ladeschlussspannung muss eingehalten werden. Lädst du drüber, gehen die Zellen kaputt, darunter werden sie nicht auf 100% aufgeladen. Aber wie es im Großen und Ganzen bei dem Roadster und über 6000 einzelnen Zellen passiert ist mir auch ein Rätsel. Gruß BK PS: Hast du denn schonmal einen Wechselrichter aufgebaut und mit nem BLDC oder ähnlichem getestet? Ebenfalls Nachtrag: Ja, habs jetzt gesehen usw. Aber ich meinte es nur gut. Kann nur die Erfahrungen teilen, die ich selbst gemacht habe. Naja, die ganzen "grossen" Karts mit ihren angeblichen 200PS halte ich für totalen unsinn. Guck dir mal das Linde Kart an. Weltrekord mit knapp 3sek auf 120mhp. Und da ist nix mit 90kW oder 200PS. Das Teil hat Peak 18kW. =)
Bartek K. schrieb: > Du willst doch nicht in Wirklichkeit 90kW in ein Kart blasen? Noch nie was von Superkarts gehört? Gut, auf 90kW bringen die es auch nicht ganz, aber fast: http://www.superkart-racing.de/kart/was_sind_superkarts.htm Unter der Verkleidung steckt übrigens relativ normale Karttechnik. Der Rahmen ist natürlich verstärkt und die Vorderräder haben Scheibenbremsen. Es gibt keinen Gurt oder sonstige Sicherheitsmaßnahmen. Nur was für Leute, die ihren Seelenfrieden geschlossen haben. Ich fahr gerne Rennen und der Kick ist bestimmt besser als jede Art von S*x, aber ich riskiere dafür nicht mein Leben.
Ben _ schrieb: > Außerdem vergleichst Du Äpfel mit Bohnen. Bei der Straßenbahn und der > E-Lok kommt der Strom aus der Oberleitung, aus der ich Strom entnehmen > oder ihn beim Bremsen einspeisen kann. Ich brauch mir also auf dem > Fahrzeug keine Sorgen darüber zu machen wo die Energie für den Antrieb > herkommt oder wo ich sie speichere - ich kann mich allein auf den > Antrieb selbst konzentrieren und brauche keine Energiespeicher > mitschleppen. Aufgepasst: Speisen zu viele Stadtbahnen gleichzeitig ein, ist ggf. das Netz nicht aufnahmebereit. In Hannover wird beispielsweise mit 600V Nennspasnnung gefahren. Wenn die Spannung durch starke Einspeisung (ich glaube) 650V übeschreitet, wird nicht eingespeist, sondern über Heizwiderstände auf dem Dach gebremst. Ansonsten haben unsere bahnen als Fallback und für Notbremsungen noch Wirbelstrombremsen und Scheibenbremsen dabei.
Bartek K. schrieb: > http://www.kc-world.de/LiPo-Balancer.htm > > Soetwas in der Art ist es. > Die Maximale Ladeschlussspannung muss eingehalten werden. > Lädst du drüber, gehen die Zellen kaputt, darunter werden sie nicht auf > 100% aufgeladen. LIPO Balancer kenne ich, aber erstens sind Lipos keine LiIon und zweitens sollte die Frage eben genau darauf herauslaufen, wie man die 6000 Stück Zellen unter Kontrolle kriegt. > Aber wie es im Großen und Ganzen bei dem Roadster und über 6000 > einzelnen Zellen passiert ist mir auch ein Rätsel. Genau das wollte ich eben wissen. > PS: Hast du denn schonmal einen Wechselrichter aufgebaut und mit nem > BLDC oder ähnlichem getestet? Alles was ich bisher an Erfahrung in diesem Bereich habe, ist ein selbstgebauter BLDC-Regler für ca. 20V/8A. Zwar noch nicht ganz fertig, aber funktioniert schonmal. Für das, dass ich damals nur eine seit 2 Jahren abgeschlossene Automatikerlehre hatte ist das ja schonmal nicht schlecht. Und jetzt habe ich auch mit einem E-Studium angefangen. Soll heissen: Ich lerne solche Sachen schnell und komme auch selbst auf gute Ideen, daran solls also nicht scheitern.
Bartek K. schrieb: > Weltrekord mit knapp 3sek auf 120mhp. Nachtrag: meinte 3,5sek und 60mph. Hatte mich vertan. Gruß BK
Urban B. schrieb: > aber erstens sind Lipos keine LiIon Riichtig, aber die Ladeschlussspannung muss bei beiden beachtet werden. Nur liegt die bei LiIon etwas dadrüber. Icke ®. schrieb: > Noch nie was von Superkarts gehört? Gut, auf 90kW bringen die es auch > nicht ganz, aber fast: > > http://www.superkart-racing.de/kart/was_sind_superkarts.htm > > > Unter der Verkleidung steckt übrigens relativ normale Karttechnik. Der > Rahmen ist natürlich verstärkt und die Vorderräder haben > Scheibenbremsen. Es gibt keinen Gurt oder sonstige Sicherheitsmaßnahmen. > Nur was für Leute, die ihren Seelenfrieden geschlossen haben. Ich fahr > gerne Rennen und der Kick ist bestimmt besser als jede Art von S*x, aber > ich riskiere dafür nicht mein Leben. Schon lustig die Teile find ich. Aber 95PS Verbrenner ist nicht 95PS Elektro=). Bei echten 95PS E-Antrieb mit dem passenden Motor, werden die Wellen und Zahnriemen oder Kette, was auch immer, sehr schnell "weich". Ich sehs doch bei meinem Test mit 10kW PMSM-Antrieb. Das Drehmoment ist so hoch, dass die Räder innerhalb von Sekungen aufglühen. Man kann bei vollem Drehmoment nicht vorwärts kommen, zur Zeit sitze ich an einer digitalen Schlupfregelung. Damit wird ein anfahren möglich sein. Hätte ich 50kW, dann wären 25kW völlig sinnlose Verschwendung!
Bartek K. schrieb: > Aber 95PS Verbrenner ist nicht 95PS Elektro=). Ja, bei Elektro ist der Spaß nach spätestens 10 Min. vorbei ;-)
Ja, ihr habt recht, 90kW ist zu viel für ein Kart :-) Wobei, wenn ich mir das nochmal überlege, kann ein Kart überhaupt zu viel Leistung haben? Kann man zu viel Spass haben? :-D Aber das ist nicht das Thema dieses Threads. Es geht darum, herauszufinden wie die grossen Autohersteller den elektrischen Teil der Antriebstechnik realisieren. Weiss noch jemand etwas über die Akkuüberwachung/Ladetechnik?
Icke ®. schrieb: > Ja, bei Elektro ist der Spaß nach spätestens 10 Min. vorbei ;-) Ich sags dir, ich würde auch lieber 5 Liter tanken, als 2 Stunden laden.
Die Curtis Controller und wir mit unseren 3 Phasen BLDCs nehmen so um die 18-20khz PWM. Das Drehfeld selber hat natürlich eine andere Frequenz abhängig von der Drehzahl des Motors, die wir über Halls resynchonisieren. Die Controller selber liefern 48-72 Volt, 40 Ampere normal und ca. 800 Ampere Peak pro Phase.
Matthias Sch. schrieb: > 40 Ampere > normal und ca. 800 Ampere Peak pro Phase Wenn ich ein Dauerstrom von 40A/Phase hab, warum dann aber 800A Peak? Mit welcher Peakdauer sind 800A möglich? Gruß
@bartek Die 200Hz waren für einen Bürstenmotor gedacht. Bei einem BLDC muß man sich sowieso nach den Anforderungen des Motors richten, da gehts ja dann auch um die Strombegrenzung, Drehzahl usw.
Joa, ok.
Aber große Bürstenmotoren (Strom >50A) sollte man dennoch mit 10-50kHz
betreiben.
>>>DENN, durch die verdammt niedrige Induktivität, hast du bei 200Hz keinen bzw.
NULL Speicherbetrieb. Fazit: Motor hat wenig Drehmoment.
Gruß
BK
Bartek K. schrieb: > Wenn ich ein Dauerstrom von 40A/Phase hab, warum dann aber 800A Peak? > Mit welcher Peakdauer sind 800A möglich? Wir verwenden 6 IRFB3207 MOSFets pro Phase (= Halbbrücke). IR ist mit den Pulszeiten im Datenblatt ein wenig wischi-waschi, und sagen 'limited by junction temperature', hängt also sehr von der Kühlung ab. Allerdings erlaubt die Bauform sowieso nur einen (Dauer-) Strom von 75 Ampere/MOSFet, TO220 eben. Der MOSFet selber ist tatsächlich soger für angeblich 720 Ampere Peak ausgelegt, pro Stück wohlgemerkt. Da die Motore aber 4kW @ 48 Volt haben, reicht ein Dauerstrom von ca 120 Ampere. Ein hoher Peakstrom kann allerdings schon mal beim Anfahren am Berg vorkommen, wir haben aber selten mehr als 200-300 Ampere gemessen.
> Aber große Bürstenmotoren (Strom >50A) sollte man dennoch > mit 10-50kHz betreiben. Das vergiss mal ganz schnell wieder. Die Bahn hat sich wegen Bürstenfeuer-Problemen an ihren Einphasen-Reihenschlußmotoren extra ein 16,7Hz-Netz gegönnt.
Matthias Sch. schrieb: > Wir verwenden 6 IRFB3207 MOSFets pro Phase (= Halbbrücke). IR ist mit > den Pulszeiten im Datenblatt ein wenig wischi-waschi, und sagen 'limited > by junction temperature', hängt also sehr von der Kühlung ab. Allerdings > erlaubt die Bauform sowieso nur einen (Dauer-) Strom von 75 > Ampere/MOSFet, TO220 eben. Der MOSFet selber ist tatsächlich soger für > angeblich 720 Ampere Peak ausgelegt, pro Stück wohlgemerkt. Verstehe ich das richtig und ihr baut solche Regler, ohne jemals auch nur die thermischen Verhältnisse gerechnet zu haben? Und ohne eine Strombegrenzung?
Ben _ schrieb: >> Aber große Bürstenmotoren (Strom >50A) sollte man dennoch >> mit 10-50kHz betreiben. > Das vergiss mal ganz schnell wieder. Die Bahn hat sich wegen > Bürstenfeuer-Problemen an ihren Einphasen-Reihenschlußmotoren extra ein > 16,7Hz-Netz gegönnt. Die Festlegung auf ursprünglich noch 50/3 Hz = 16 2/3 Hz ( 16,7 Hz lt. Wikipedia ab 1995 ) erfolgte natürlich zu Anfang der Bahnelektrifizierung und war natürlich ein Kompromiss zwischen DC und ( transformierbarem ) AC. Mit den "10-50kHz" ist natürlich die Taktfrequenz des Gleichstromstellers für die DC-Maschine gemeint !
Mine Fields schrieb: > Verstehe ich das richtig und ihr baut solche Regler, ohne jemals auch > nur die thermischen Verhältnisse gerechnet zu haben? Und ohne eine > Strombegrenzung? Nein, das verstehst du falsch. Nur IR rückt eben nicht mit direkten Pulszeiten raus. Natürlich sind die Bauteile grosszügig gekühlt und der Strom und die Temperatur werden ständig gemessen (siehe oben: Sicherheitsmassnahmen). Die Controller sind um den Faktor 2-3 überdimensioniert, einfach um Luft nach oben zu haben.
Die meisten der üblichen Loks dürften keine Gleichstromsteller besessen haben, sondern eher Anzapfungen an der Wicklung des Transformators mit Stufenschaltwerken und Stromteilern.
Matthias Sch. schrieb: > Nein, das verstehst du falsch. Nur IR rückt eben nicht mit direkten > Pulszeiten raus. Ok, also nicht wirklich gerechnet. Das Datenblatt gibt alles her. Matthias Sch. schrieb: > Natürlich sind die Bauteile grosszügig gekühlt Ok, sprich: Die Kühlkörperauslegung ist geraten. Matthias Sch. schrieb: > Natürlich sind die Bauteile grosszügig gekühlt und der > Strom und die Temperatur werden ständig gemessen Ja aber eine richtige Begrenzung gibt es wohl nicht wenn du schreibst: Matthias Sch. schrieb: > Ein hoher Peakstrom kann allerdings schon mal beim Anfahren am > Berg vorkommen, wir haben aber selten mehr als 200-300 Ampere gemessen. Denn dann würde der Peakstrom klar auf einen Wert begrenzt sein und sich nicht einfach mal so ergeben. Aber ist ja nicht schlimm, solange es eine Bastelei ist.
> Die meisten der üblichen Loks dürften keine Gleichstromsteller besessen > haben, sondern eher Anzapfungen an der Wicklung des Transformators mit > Stufenschaltwerken und Stromteilern. Genau, und dann liefen/laufen ihre "DC"-Reihenschlussmaschinen eben direkt mit 16,7 Hz Wechselstrom. Aber "etwas neuere" Bahnen ( aktuelle haben 3~Motoren ) am Gleichstrom-Fahrdraht hatten eben einen Gleichstromsteller, und dessen Taktfrequenz ( eher einige hundert Hz als 50 kHz ) ist der Gleichspannung überlagert.
Mine Fields schrieb: > Ok, also nicht wirklich gerechnet. Das Datenblatt gibt alles her. Doch, natürlich gerechnet, ich werde dir aber nicht alles über unsere F+E verraten. Mine Fields schrieb: > Ok, sprich: Die Kühlkörperauslegung ist geraten. Auch falsch. Die Kühlkörperauslegung ist, wie oben geschrieben, überdimensioniert und unterschreitet den thermischen Mindestwiderstand um Faktor 3. Ein Beispiel: Ich schicke 200 Ampere über 3 parallel geschaltete MOSFets. Bei einem worst-case RDSOn von 4.5 mOhm sind das 1.5 mOhm. Es gilt P= R * I². Setzt man die Werte ein, ergibt sich P mit 60 Watt. Da immer 2 Triplets aktiv sind, werden also bei 200 Ampere 120 Watt Verlustleistung erzeugt. Unser Kühlkörper kann bei einer Umgebungstemperatur von 80°C jederzeit 400 Watt abführen und dabei die Temperatur auf 100°C halten. Der thermische Widerstand ist also 20°K/400W = 0,05 K/W Wohlgemerkt, angenommen ist immer der Worst-Case. Im Normalfall fliessen ca. 25-40 Ampere. Mine Fields schrieb: > Denn dann würde der Peakstrom klar auf einen Wert begrenzt sein und sich > nicht einfach mal so ergeben. Ich weiss nicht, wie du solche Ströme 'begrenzen' willst, aber dazu muss man ihn messen und die Elektronik und Controllerware entsprechend auslegen. Alles andere ist Energieverschwendung. Da kann man nicht einfach mal ein Stück Draht reinlegen und die Spannung über ihm messen. Ich werde dir allerdings nach wie vor nichts aus einer laufenden F+E verraten, es ist nicht nur mein Projekt, da hängen Arbeitsplätze dran. Du musst eben auch bedenken, das der normale Autofahrer sich einen Teufel um Ströme schert, wenn er in einem kritischen Überholvorgang steckt. Da wird raufgetreten und der Wagen muss das tun. Du machst dir in so einem Moment auch in deinem Benziner keine Gedanken, ob die Lager im Getriebe das aushalten, es muss einfach gehen, es gehört zur Fahrsicherheit. Ich will lediglich dem TE ein paar Beispiele aus der Praxis geben.
> Aber "etwas neuere" Bahnen ( aktuelle haben 3~Motoren ) Korrekt. > am Gleichstrom-Fahrdraht hatten eben einen Gleichstromsteller, > und dessen Taktfrequenz ( eher einige hundert Hz als 50 kHz ) ist > der Gleichspannung überlagert. Diesen Teil versteh ich nicht richtig, was soll da wo überlagert sein? Gleichstrom wird zB. hier in Berlin bei der S-Bahn und bei der Straßenbahn verwendet (750-800V bzw. 600V). Die BR 481 der Berliner S-Bahn fahren ebenfalls mit 3phasigen Asynchronmotoren. Die im Fahrbetrieb deutlich hörbare PWM-Frequenz hat dem Ding die Beinamen "Fliegeralarm", "Kreissäge" und "Heulsuse" eingebracht und dürfte schätzungsweise bei maximal 500Hz liegen. Ob die Dinger schneller schaltende Chopper zur Strombegrenzung einsetzen weiß ich nicht, ich halte es aber für unwahrscheinlich.
Matthias Sch. schrieb: > Ein Beispiel: Ich schicke 200 Ampere über 3 parallel geschaltete > MOSFets. Bei einem worst-case RDSOn von 4.5 mOhm sind das 1.5 mOhm. Es > gilt P= R * I². Setzt man die Werte ein, ergibt sich P mit 60 Watt. Da > immer 2 Triplets aktiv sind, werden also bei 200 Ampere 120 Watt > Verlustleistung erzeugt. Unser Kühlkörper kann bei einer > Umgebungstemperatur von 80°C jederzeit 400 Watt abführen und dabei die > Temperatur auf 100°C halten. Der thermische Widerstand ist also > 20°K/400W = 0,05 K/W > Wohlgemerkt, angenommen ist immer der Worst-Case. Im Normalfall fliessen > ca. 25-40 Ampere. Die Rechnung ist natürlich falsch und unvollständig. Man kann jetzt natürlich so viel Alu reinbauen, dass es trotzdem geht, aber das ändert nichts an der Tatsache, dass das Pfusch ist. Matthias Sch. schrieb: > Ich weiss nicht, wie du solche Ströme 'begrenzen' willst, aber dazu muss > man ihn messen und die Elektronik und Controllerware entsprechend > auslegen. Alles andere ist Energieverschwendung. Da kann man nicht > einfach mal ein Stück Draht reinlegen und die Spannung über ihm messen. Die Strombegrenzung ist trivial, völlig unabhängig vom Strom. Und eine Messung von mehreren Hundert Ampere ist kein Hexenwerk, wenn man sein Handwerk versteht. Wenn man nicht einmal die einfachsten Dinge weiß - peinlich. Matthias Sch. schrieb: > Ich werde dir nach allerdings wie vor nichts aus einer laufenden F+E > verraten, es ist nicht nur mein Projekt, da hängen Arbeitsplätze dran. Die armen Menschen, deren Arbeitsplätze an gröbsten Bastlerpfusch hängen. Matthias Sch. schrieb: > Ich will lediglich dem TE ein paar Beispiele aus der Praxis geben. Ich denke aber, dass der TE keine so schlechten Beispiele hören will.
Meine 48V/100A Vollbrücke verwendet einen Stromwandler zur Messung des Stromes.
Mine Fields schrieb: > Die Rechnung ist natürlich falsch und unvollständig. Man kann jetzt > natürlich so viel Alu reinbauen, dass es trotzdem geht, aber das ändert > nichts an der Tatsache, dass das Pfusch ist. Du suchst nur Streit, oder? Dann erklär dem TE doch du deine Prinzipien. Ben _ schrieb: > Meine 48V/100A Vollbrücke verwendet einen Stromwandler zur Messung des > Stromes. Wir nehmen Hallsensoren.
>> am Gleichstrom-Fahrdraht hatten eben einen Gleichstromsteller, >> und dessen Taktfrequenz ( eher einige hundert Hz als 50 kHz ) ist >> der Gleichspannung überlagert. > Diesen Teil versteh ich nicht richtig, was soll da wo überlagert sein? Ein derartiger Gleichstromsteller ("Chopper") ist nix anderes als ein Tiefsetzsteller ( Step-Down-Wandler ), und dessen Taktfrequenz ist natürlich am Ausgang auch noch vorhanden.
Matthias Sch. schrieb: > Du suchst nur Streit, oder? Nein, ich finde es nur schockierend, wie man sich mit so wenig Ahnung noch so großkotzig als Vollprofi aufspielen kann. "Meine F&E ist so toll, dass ich gar nichts verraten darf" und solche Sprüche musst du nicht bringen, wo doch offensichtlich ist, dass ich deine Weisheiten nicht nötig habe. Matthias Sch. schrieb: > Dann erklär dem TE doch du deine Prinzipien. Das mache ich doch.
http://www.teslamotors.com/blog/induction-versus-dc-brushless-motors http://www.teslamotors.com/blog/evolution-motor-control-waves-bits http://www.teslamotors.com/blog/engineering-update-powertrain-15 "The IGBT (Insulated Gate Bipolar Transistor) inside of the PEM is what converts and regulates power from the battery. These small parts are improving in both efficiency and power handling capability and by integrating the latest generation of parts, we have been able to boost the PEM output current by about 33% from 640A rms to 850A rms with the same number of IGBTs. We could have increased the current and torque by just using more of the older IGBTs but this would have required a much more extensive redesign of the entire PEM including the mechanical packaging and cooling systems. Since the new IGBTs have improved efficiency they also end up giving the PEM better overall efficiency and improve the range of the vehicle slightly. At most operating points the PEM is already very efficient (95-98%) but every little bit helps. Other than this change to the IBGTs and a few improved internal cables the PEM is identical to a 1.0 PEM; without the external serial number labels you can not tell them apart."
Nee, zum echten Tiefsetzsteller fehlt mir die glättende Drossel. Es bleibt für mich eine einfache PWM-Steuerung und natürlich kommt (wegen der fehlenden Drossel) die PWM-Frequenz hinten wieder raus. Deswegen hört man sie ja so gut an den Fahrmotoren. Stromwandler bedeutet für mich Strommessung mit Hallsensor (zB. LEM)... Das ist sehr verlustarm und ich krieg ein gut auswertbares Signal gleich frei Haus.
Ben _ schrieb: > Nee, zum echten Tiefsetzsteller fehlt mir die glättende Drossel. Na, und was ist der Motor wohl? Ben _ schrieb: > Stromwandler bedeutet für mich Strommessung mit Hallsensor (zB. LEM)... Oder Kompensationswandler, die in dem Bereich eigentlich üblich sind.
Motor als Glättungsdrossel... aaahhhhja. Nun versteh ich wieso einige hier von Pfusch schreiben.
Nicht streiten bitte :-) Ich denke mal, das mit dem Regler ist jetzt einigermassen klar. Als "Schalter" nimmt man IGBT-Module, evtl. sogar mit allen drei Halbbrücken in einem Modul. Dieses muss ausreichen gekühlt werden. Die Ansteuerung erfolgt mit IGBT-Treibern, welche optisch getrennte Eingänge besitzen. Diese werden von einem uC angesteuert, so wie es auch ein Frequenzumrichtet tut. Also mit FOC und Frequenzen um die 2kHz bis 20kHz. Vorzugsweise über 16 kHz. Dazu braucht es eine ganze Menge an Überwachungsmechanismen, die die Zwischenkreisspannung, Stromverbrauch, Drehzahl und Temperatur überwachen. Die Rückspeisung, um die Akkus beim Bremsen zu laden, fehlt aber noch. Werden da direkt die bereits vorhandenen Halbbrücken zur Gleichrichtung eingesetzt? Dann müsste aber die Zwischenkreisspannung ja noch mit Step-Up Wandler hochgesetzt werden, um damit die Akkus laden zu können. Oder wird das anders gemacht? Und dann wäre da eben noch die ganze Akku-Geschichte. Darüber konnten wir noch nicht viel in erfahrung bringen, ausser dass es nicht einfach ist knapp 7000 Zellen gleichzeitig zu laden :-) mfg EDIT: hach, schon hats wieder viele neue Beiträge gegeben während ich am schreiben war :-)
Urban B. schrieb: > Die Rückspeisung, um die Akkus beim Bremsen zu laden, fehlt aber noch. > Werden da direkt die bereits vorhandenen Halbbrücken zur Gleichrichtung > eingesetzt? Dann müsste aber die Zwischenkreisspannung ja noch mit > Step-Up Wandler hochgesetzt werden, um damit die Akkus laden zu können. > Oder wird das anders gemacht? Die Wechselrichterbrücke ist ein Vier-Quadrant-Steller, kann also auch selbst zurückspeisen. Dabei wird sie quasi von selbst ein Hochsetzsteller. Über die Regelung hat man Strom und Spannung voll im Griff, kann also einen Akku auch problemlos laden. Überflüssige Energie kann in einem Bremswiderstand verheizt werden.
Ben _ schrieb: > Nee, zum echten Tiefsetzsteller fehlt mir die glättende Drossel. Es > bleibt für mich eine einfache PWM-Steuerung und natürlich kommt (wegen > der fehlenden Drossel) die PWM-Frequenz hinten wieder raus. Deswegen > hört man sie ja so gut an den Fahrmotoren. Ben___, wenn du noch niemals einen DC-Motor richtig betrieben hast bzw. mit PWM gesteuert hast, würde ich solche Geschichten wie oben nicht verbreiten! Jeder Motor, egal ob DC_Motor oder 3 Phasen AC, wirkt als Drossel/ sogar Speicherdrossel. Je nach Drehzahl, verändert er seine Induktivität. Beim positiven Puls wird Energie in die Wicklungen gespeist, der Strom steigt meistens Linear an. Sobald wir den Puls abschalten (PWM) entsteht durch das Induktionsgesetz eine Umpolung des Stroms. Jetzt muss die Backdiode im Mosfet den negativen Strom leitend machen und es entsteht ein negativer Stromfluss, ebenfalls entsteht dadurch weiterhin Magnetische Feldstärke durch die Wicklung im Motor-er bewegt sich weiter. Oft verwendet man eine Halbbrücke um die negtiven Ströme besser leiten zu können. Denn Backdioden sind 1. langsam 2. können nicht genug Strom leiten. Dieses Prinzip ist in jedem Antriebstechnikbuch beschrieben und sollte für die meisten nachvollziehbar sein. Was du meinst, ist ein echter Spannungsgesteuerter DC-Motor mit step-down wandler(Speicherdrossel und meintwegen sogar Elkos). Gruß BK
Matthias Sch. schrieb: > Ein Beispiel: Ich schicke 200 Ampere über 3 parallel geschaltete > MOSFets. Bei einem worst-case RDSOn von 4.5 mOhm sind das 1.5 mOhm. Es > gilt P= R * I². Setzt man die Werte ein, ergibt sich P mit 60 Watt. Da > immer 2 Triplets aktiv sind, werden also bei 200 Ampere 120 Watt > Verlustleistung erzeugt. Hierzu fehlt aber noch einiges!!! Schon richtig was du schreibst und sagst, aber es gibt einen weiteren großen Verlust und der wird durch die Schaltgeschwindigkeit erzeugt. Kein Mosfet der Welt kann absolut steil schalten. Der Crestfaktor ist nämlich auch bei PWM nicht 1, sondern eher etwas zwischen 0,9-0,98. Dieser Effektivwert muss ermittelt werden und daraus ergeben sich locker 2-10% Verlust am Fet. Gruß BK
Noch eine Ergänzung: Im Ein-Quadranten Betrieb mit einem Mosfet gibt es keine Aktive-Gleichrichtung. Erst wenn ich eine Backdiode zum Motor parallel schalte, ergibt sich der von mir und Mine Fields (minefields) beschriebene Step-Down Betrieb innerhalbs des DC-Motors. Es werden keine externen Bauteile benötigt! Besser ist aber wie gesagt ein Betrieb mit Halbbrücke, damit spart man sich die Backdiode und das System ist vom eta. besser. Läuft natürlich nur für eine Drehrichtung. Mit Vollbrückenschaltungen lassen sich beide Drehrichtungen erzeugen. Das mit der Parallel geschalteten Diode findet man in tausenden billigen Modellbaureglern usw. Gruß BK
Noch eine Ergänzung: PWM bedeutet nicht, parallel zum Puls erzeugendes Drehmoment! Ein sehr schneller und guter, Mir bekannter Motor ist im Anhang. Verwendungszweck: Positioniermaschinen aller Art, vorallem CNC. Keine billig Müll, sondern Industriequalität für ca. 500Euro. Der Erste weiter unten in der Tabelle: Modell: R01SA In der Tabelle findet man die Angabe: Mechanical Time constant 4,4ms Diese Angabe gibt die Zeit zum Beschleunigen bei max. Strom, d.h. erst nach 4,4ms fängt der Motor Drehmoment aufzubauen. Dies kann könnte man, wenn man wollte mit dem Wert: Elektrical time constant 0,44ms und dem max. Peakstrom sowie zig Faktoren, wie Rotormasse, Trägheit usw. ebenfalls nachrechnen und man käme auf die 4,4ms. Was ich damit sagen will, ist denkbar einfach und zwar: Der Motor selbst ist so träge, dass man mit rund 20kHz PWM, Periode=50us, dt=50% ca. 100Pulse braucht um das mindeste Drehmoment zu erzeugen, damit er sich anfängt weiter zu drehen oder bremsen. Aus diesem Grund kann man sagen, dass eine PWM um die 20kHz sehr feinfühlig ist und als Quasi Intergrator wirkt. Selbstverständlich kann man auch eine PWM von 50Hz nehmen, aber dann ist der Step-Down bzw. Integriereffekt sehr eingeschränkt und groß. Bei sehr großen Motoren 1-100kW grob, ist eine höhere Frequenz nicht unbedingt nötig aber erleichtert eine Regelung und ebenfalls den Effekt des Inneren Umsetzens von U/I. Je höher die Spannung, desto größer könnte die teoretische Periode des ein und ausschaltens der Motorwicklung sein. (Größere Periode=niedrigere Frequenz!) Gruß BK
@ Bartek K. (lemon) >Jeder Motor, egal ob DC_Motor oder 3 Phasen AC, wirkt als Drossel/ sogar >Speicherdrossel. In der Tat. >Je nach Drehzahl, verändert er seine Induktivität. Kann sein. >Beim positiven Puls wird Energie in die Wicklungen gespeist, der Strom >steigt meistens Linear an. Jo. >Sobald wir den Puls abschalten (PWM) entsteht durch das Induktionsgesetz >eine Umpolung des Stroms. Kaum. Der Strom durch einen Induktivität ist kontinuierlich. Allerdingn polt sich die SPANNUNG um, die Drossel wird zum Generator. >Jetzt muss die Backdiode im Mosfet den negativen Strom leitend machen Backdiode? Noch nie den begriff gehört. Freilaufdiode ist mir deutlich geläufiger und auch sympatischer. >und es entsteht ein negativer Stromfluss, Die Stromrichtung durch die Induktivität bleibt erstmal erhalt, lediglich der Anstieg wird negativ, denn er fällt linear ab. >ebenfalls entsteht dadurch >weiterhin Magnetische Feldstärke durch die Wicklung im Motor-er bewegt >sich weiter. >Oft verwendet man eine Halbbrücke um die negtiven Ströme besser leiten >zu können. Denn Backdioden sind 1. langsam 2. können nicht genug Strom >leiten. Zweiquadrantenbetrieb, sie Motoransteuerung mti PWM. >Was du meinst, ist ein echter Spannungsgesteuerter DC-Motor mit >step-down wandler(Speicherdrossel und meintwegen sogar Elkos). Nur dass man sowas aus ökonomischen Gründen nur selten macht. Die singenden Motoren sind zwar bisweilen nervig, dafür aber billiger. MfG Falk
Falk Brunner schrieb: >>Sobald wir den Puls abschalten (PWM) entsteht durch das Induktionsgesetz >>eine Umpolung des Stroms. > > Kaum. Der Strom durch einen Induktivität ist kontinuierlich. Allerdingn > polt sich die SPANNUNG um, die Drossel wird zum Generator. Moin, danke Falk, sicher ist es Ua, die negativ wird. Wenn noch irgendwo ein kleiner Flüchtigkeitsfehler drin ist, bitte gleich schreien. Ich lese meinte Texte nicht korrektur, hab keinen Bock darauf! Aber anhand dieser Posts sollte vielen klar werden, wie es aussieht! Jeder der jetzt behauptet, dass eine Motorspule keine "Drossel" ist sollte es mit Zahlen oder Fakten belegen. Ansonsten wirkt es noch unglaubwürdiger! Gruß BK
Mine Fields schrieb: > Nein, ich finde es nur schockierend, wie man sich mit so wenig Ahnung > noch so großkotzig als Vollprofi aufspielen kann. Ich habe nie was von Profi gesagt - bisher hab ich nicht einen Cent aus dem Krams erhalten. Ich bin da, weil ich einem Freund helfe, was neues auf die Beine zu stellen. Der beschäftigt sich seit 20 Jahren mit E-Autos, und ich bin einfach neugierig auf diese Technik. Mine Fields schrieb: > "Meine F&E ist so > toll, dass ich gar nichts verraten darf" und solche Sprüche musst du > nicht bringen Es geht im Moment darum, ein paar Investoren zu gewinnen, da möchte ich meinem Freund nicht in den Rücken fallen. Drück mir lieber die Daumen, das das klappt. Bartek K. schrieb: > Der Crestfaktor ist nämlich auch bei PWM nicht 1, sondern eher etwas > zwischen 0,9-0,98. Dieser Effektivwert muss ermittelt werden und daraus > ergeben sich locker 2-10% Verlust am Fet. Du hast natürlich recht. Die PWM Frequenzen und das Tastverhältnis spielen da mit rein. Glücklicherweise habe ich als Vorbild den originalen (Block-)kommutierenden Controller für die Motore und da kann ich ne Menge dran messen. Die Kühlung bei diesem Teil ist übrigens extrem sparsam - das ganze Dings ist ein vergossener Block von gerade mal 20 x 8 x 7 cm, kleiner als ein Ziegelstein. 5 mm Alu rundherum, und die MOSfets werden einfach auf den Boden gedrückt. Mine Fields schrieb: >> Dann erklär dem TE doch du deine Prinzipien. > > Das mache ich doch. Davon habe ich leider nichts gesehen, obwohl ich den ganzen Thread nochmal von vorne durchgegangen bin. Wir würden gerne alle von deinem überlegenen Wissen partizipieren.
@ Matthias Sch. (Firma: Matzetronics) (mschoeldgen) Ich finds auch ganz ehrlich etwas arm in dem Forum hier, weil alle gleich rumstreiten anstatt etwas sinnvolles Schreiben. Deswegen dachte ich gestern Abend, dass ich paar längere Zeilen tippe, ob es jetzt jeden interessiert oder er sowieso schon alles weiß, war mir egal. Ich hab mir wenigstens die Mühe gemacht. Ich finds aufjedenfall gut, dass Ihr solche Controller baut und damit irgendwann etwas erreichen wollt. Leider denken alle bei Gewerblich sofort, dass man damit das Große Geld machen will usw. aber dies ist nich ganz easy. Dafür braucht man Zeit und Forschung. Und ich glaube dir, dass du bis jetzt damit kein Geld gemacht hast, weil die Entwicklung eines fertigen Produkts lange dauert. Und je weniger daran mitwirken usw. dauert es länger. Leider kennt heute niemand mehr die echte Zusammenarbeit. Jeder der sich selbstständig macht, wird ab dem Zeitpunkt quasi allein gelassen und muss in Foren ect. vorsichtig sein. Weil jeder denkt sich, warum soll man einem gewerblichen, der damit Kohle machen will, helfen und Daten schenken?? Weißt was ich meiine oder? Gruß BK
Habt ihr eigentlich ne homepage ? Kann man das Ganze irgendwo im Netz betrachten? Hab bei google nix gefunden........ Gruß BK
Noch etwas was mir grad einfällt: Ich muss Mine Fields (minefields) ebenfalls recht geben, was die Strommessung angeht. Denn eine Strommessung kann selbstverständlich "Nur" durch ein Stück Draht erfolgen und das tut sie auch. Habe schon zig Schweißinverter auseinander gehabt und dort wird Sekundärseitig immer mit"Stück Draht" gemessen. Das "Stück Draht" ist nämlich die dicke Kupferschiene, die von den Dioden zum Ausgang führt. Der Spannungsabfall an dem Stück wird differentiell abgeführt und mit einem schnellen sowie präzisen OPV verstärkt. Gegebenfalls etwas gefiltert und spiegelt letztendlich den Strom wieder. Diese Methode ist "Quasi" billig und gut. Solange man die Technik dahinter genau versteht und es praktisch umsetzt, spricht dem nichts entgegen. Ein Stromwandler an dieser Stelle ist natrülich einsetzbar, aber kostet wahrscheinlich das 100fache von der einfachen Methode. Grund hierfür ist auch, dass ein Stromwandler schnell an sein Limit kommt und Peaks im zig Hundertamperebereich nicht mehr richtig messen wird. Ausser man setzt hier extrem große Wandler ein, die dann aber an Auflösung verlieren. Ausserdem macht ein Stromwandler nur richtig sinn, wenn eine Galvanische Trennung unbedingt Pflicht ist. Danke fürs lesen..... Gruß BK
Bartek K. schrieb: > Weil jeder denkt sich, warum soll man einem gewerblichen, der damit > Kohle machen will, helfen und Daten schenken?? Weißt was ich meiine > oder? Ja, denn wäre ich Profi, würde ich, wie alle anderen Profis auch, mich hier gar nicht melden. Die 'verschlossenen Türen' gelten dann auch für mich. Im Augenblick kann ich eben ein bisschen helfen zu sagen, was in der E-Auto Technik so Standrd ist und was wir andenken. Bartek K. schrieb: > Habe schon zig Schweißinverter auseinander gehabt und dort wird > Sekundärseitig immer mit"Stück Draht" gemessen. Da macht hat der Verlust nix aus. Aber mit den Batterien bei einem E-Auto musst du immer ein bisschen haushalten. Bartek K. schrieb: > Der Spannungsabfall an dem Stück wird differentiell abgeführt und mit > einem schnellen sowie präzisen OPV verstärkt. Im Monemt benutze ich die 200A Variante des ACS758, der das Magnetfeld mittels eines Hallsensors an einem kurzen,fetten Kupferstück misst, das durch ihn hindurch geht. http://www.allegromicro.com/Products/Current-Sensor-ICs/Fifty-To-Two-Hundred-Amp-Integrated-Conductor-Sensor-ICs/ACS758.aspx ACS sagt, das diese Strecke nur 100 uOhm hat. Beim Testen das gute alte Zangenamperemeter. Bartek K. schrieb: > Habt ihr eigentlich ne homepage ? > Kann man das Ganze irgendwo im Netz betrachten? http://www.elektroauto-ebert.de Die Seite ist grauenhaft und nicht auf meinem Mist gewachsen. Findest da allerdings nix über die Neuentwicklungen.
Jo danke! Matthias Sch. schrieb: > Da macht hat der Verlust nix aus. Aber mit den Batterien bei einem > E-Auto musst du immer ein bisschen haushalten. Hehehe, nein du hast das Prinzip falsch verstanden. Es handelt sich um sowieso vorhandene Stromschienen, wo abgegriffen wird. Ich sags kurz und knapp, dein Prinzip mit dem Hallsensor ACSXXX ist von Verlust größer, als die billigen "Stück Draht Prinzipien". Du musst einen Shunt reinlöten in deine Schaltung, ich mit meinem "billgen Stückchen Draht" habe schon einen und nutze ihn aus. Und es gibt zahlreiche Stellen in jedem Gerät, wo man sich ein kleines Stückchen Shunt klauen kann. Denn brauchen tun wir die Leitung/Schiene im Gerät sowieso!!!! >>>>>(Bitte denkt nicht, dass es so einfach ist mit dem Shunt. Kupfer ist ein guter Leiter, aber ebenfalls ein Schlechter Widerstand. Kupferschienen und Kabel ect. erwärmen sich (1-2Grad reichen schon aus) und vergrößern das Delta U, deswegen wird oft auf dem "Stückchen Draht" die Temperatur gemessen und miteinberechnet. Erst dann ergibt sich ein kompensierter Shunt, der von mA - Kiloampere gegeignet ist)<<<<< Nix für Ungut, messen kannst du womit du möchtest =) Gruß BK
Bartek K. schrieb: > Du musst einen Shunt reinlöten in deine Schaltung, ich mit meinem > "billgen Stückchen Draht" habe schon einen und nutze ihn aus. Das kenne ich natürlich auch, die ganzen älteren (DC-) E-Autos haben auch so einen Shunt, um Ströme zu messen, haben dadurch aber auch ein prinzipielles Problem mit der Masse. Der Shunt sitzt immer auf der 'Lowside' und der Motor schwebt dadurch über Masse. Deswegen kann dich ein Masseproblem in so einem Auto zum Wahnsinn treiben. Auf der Highside (also in der Plusleitung) ist so etwas einfach nicht gut zu machen, denn dein Messverstärker müsste ja zumindest mit der Vcc des Motors laufen, um die Differenz am Shunt spitzzukriegen, und damit fängt man sich einen Haufen Probleme ein, denn der Ausgang des Messverstärkers muss ja wieder auf den Controller des Motors gehen. Im Moment betreibe ich den Controller und die Sensoren nämlich mit einem galvanisch getrennten DC/DC Wandler, um den verseuchten Fahrstrom vom Rechner fernzuhalten,denn da sind Störungen drauf, die richtig übel sind. Das ist aber alles im Fluss. Je nach verwendetem Aufbau kann ich evtl. die Stromschienen benutzen, das wird sich zeigen. Danke schon mal für den Tip!
Ja sicher schwebt der Motor über dem Shunt, aber es sind hier einige Millivolt - Microvolt. Das Ganze geht auch wunderbar auf der Highside, nur muss ein DC/DC und etwas Elektronik auf der Highside vorhanden sein. Sehr gut geht es mit AD-Wandler und Optokoppler. Die Stromdaten gehen Digital zur MCU. Aber wie schon gesagt, es hängt alles vom Verwendungszweck ab. Bei Stromstärken <100A gehen in der Tat Stromwandler wie Butter. Ab >100A wirds immer enger, weil 1kA Stromwandler sehr teuer sind. Ausserdem sind die meisten langsam, Kurzschlusserkennung usw. ist damit kaum möglich. Hier ein Bsp: http://www.lem.com/docs/products/dhab%20s15.pdf +/- 600A Klein, kompakt aber leider auch langsam Bandbreite(1kHz). Für Schaltungen mit Mosfets keine Gute Wahl, denn bei einem Kurzschluss ohne Induktive Strombegrenzung kann der Strom innerhalb von wenigen us auf zig kA ansteigen und diese Peaks sind sofort tödlich für Fets. Bei IGBTs mag es funktionieren, diese können weitaus höhere Peakströme und gehen dabei nicht kaputt. Sie sind quasi dafür gebaut!! =). Möchte jetzt aber nicht weiter drauf eingehen. Offtopic. Gruß BK
Matthias Sch. schrieb: > Ich habe nie was von Profi gesagt - bisher hab ich nicht einen Cent aus > dem Krams erhalten. Du hast von R&D gesprochen und davon, dass an deiner Arbeit Arbeitsplätze hängen. Mir war natürlich schon klar, dass das alles maßlos übertrieben war und es nur Bastelei war. Matthias Sch. schrieb: > Es geht im Moment darum, ein paar Investoren zu gewinnen, da möchte ich > meinem Freund nicht in den Rücken fallen. Drück mir lieber die Daumen, > das das klappt. Investoren haben meist keine Ahnung von der Technik, also vielleicht klappt es sogar. Matthias Sch. schrieb: > Davon habe ich leider nichts gesehen, obwohl ich den ganzen Thread > nochmal von vorne durchgegangen bin. Wir würden gerne alle von deinem > überlegenen Wissen partizipieren. Dann hast du einiges überlesen. Zu viel darf ich natürlich nicht verraten, aber ich denke es reicht die nötigen Stichworte zu nennen, den Rest kann jeder selbst nachlesen. Bei Bedarf kann ich auch gerne Literaturhinweise geben. Bartek K. schrieb: > Habe schon zig Schweißinverter auseinander gehabt und dort wird > Sekundärseitig immer mit"Stück Draht" gemessen. > Das "Stück Draht" ist nämlich die dicke Kupferschiene, die von den > Dioden zum Ausgang führt. Das funktioniert bei einem Schweißumrichter vielleicht noch ganz gut, aber für eine genaue Messung, die man für die Vektorregelung braucht, taugt das nicht. Stichwort: Temperaturkoeffizient. Matthias Sch. schrieb: > Auf der Highside (also in der Plusleitung) ist so etwas einfach nicht > gut zu machen, denn dein Messverstärker müsste ja zumindest mit der Vcc > des Motors laufen, um die Differenz am Shunt spitzzukriegen, und damit > fängt man sich einen Haufen Probleme ein, denn der Ausgang des > Messverstärkers muss ja wieder auf den Controller des Motors gehen. Oder einfach eine potentialgetrennte Messung. Absolut Stand der Technik. Für die diskutierten Strombereiche macht Shuntmessung aber keinen Spaß mehr. Bartek K. schrieb: > Bei IGBTs mag es funktionieren, diese können weitaus höhere Peakströme > und gehen dabei nicht kaputt. Sie sind quasi dafür gebaut!! =). Kurzschlussströme aber auch nur im us-Bereich. Üblicherweise hat man aber auch noch eine Entsättigungsüberwachung.
Es gab schon ein paar Tage keine Antwort mehr, deshalb versuch ich es jetzt noch ein letztes Mal: Weiss jemand über die Akkuüberwachung, Ladetechnik, und sonstige Akkutechnik Bescheid? Wie lädt man knapp 7'000 Akkuzellen gleichzeitig? Auch möchte ich mich an dieser Stelle noch für die vielen informativen Antworten bedanken, die haben viel Licht in diese Angelegenheit gebracht! Grüsse Urban
z.B. Atmel ATA6870 Vergleichbares gibts eigentlich von fast allen IC Herstellern die Power/Battery-Management Chips bauen.
Johannes M. schrieb: > z.B. > Atmel ATA6870 > Vergleichbares gibts eigentlich von fast allen IC Herstellern die > Power/Battery-Management Chips bauen. Interessant! Dann also wirklich jede einzelne Zelle überwachen? Das ist krass... mfg
nein, diese schalten einige zellen zu blöcken parallel zusammen und überwachen deren spannung (70p100s oder 2x35p100s) die einzelzelle kann dann einen zusätzlichen schutz haben. ein möglicher kritischer fehler währe zb ein kurzer in einer zelle und die parallelen zellen entladen sich dan durch die eine defekte. das kann zb ein ptc element zum teil bieten: http://industrial.panasonic.com/www-data/pdf/ACA4000/ACA4000PE3.pdf sg clemens
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.