Hi, ich habe wie geschrieben einen 4 poligen Schrittmotor. Die H-Brücken für die Ansteuerung habe ich so aufgebaut: http://www.mikrocontroller.net/attachment/52650/h-br_cken.png Allerdings mit bc337/327 Ich habe die einzelnen Brücken mit jeweils zwei verpolten leds getestet. Sweit kein Problem Nun stecke ich den Motor an die Schaltung. Aber mehr als hin/her zucken kriege ich nicht hin :-( habe schon verschiedene ansteuerungsmuster versucht - aber ich glaube ich bin auf dem falschen weg. Hat jemand nen tipp? do a=1 b=0 c=0 d=1 waitms 50 a=0 b=1 c=1 d=0 waitms 50 loop
{kind=link}
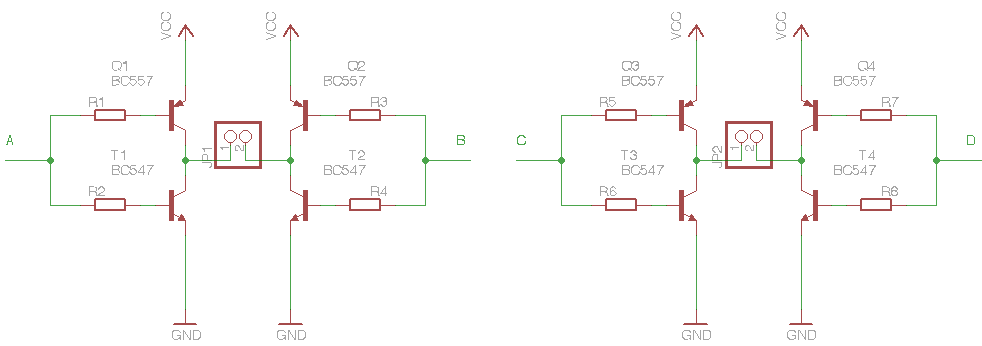
> Die H-Brücken für die Ansteuerung habe ich so aufgebaut:
Wie kommt man auf so eine bescheuerte Idee ?
Du hättet vorher wenigstems mal nachschlagen können,
wie man das richtig baut.
Das Internet wurde erfunden !
Da hättest du erfahren,
was shoot thru ist,
was Freilaufdioden bewirken,
wie man Regelwandler baut,
welche fertigen ICs es gibt.
Die Schaltung ist wirklich murks. Wenn die beiden Anschlüsse A und B nicht auf ein bestimmtes Potential gezogen werden (z.B beim Reset des µCs), dann hast du einen perfekten Kurzschluss von VCC nach GND, weil der PNP Transistor den NPN Transistor durchsteuert.
Selbst die Ansteuerungssequenz hat er vermurkst. http://www.dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10
So viel strom kann da aufgrund der stromversorgung nicht fließen, dass es die transistoren bei kurzschluss zerlegt Den herablassenden Ton (MaWin) finde ich unangemessen
Basti schrieb: > do > a=1 > b=0 > c=0 > d=1 > waitms 50 > a=0 > b=1 > c=1 > d=0 > waitms 50 > loop Dein Schrittmotor braucht vier Schritte, nicht zwei. So zuckt er nur zwischen den zwei Positionen hin und her.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.