Hi, weiß jemand von euch was das für ein Anschluss ist? Ist an der Aussenseite eines Roboters dran in der Nähe eines großen Lagers. Denke es könnte irgendwas mit der Schmierung zu tun haben. Googeln usw. hab ich schon probiert, aber auch in der Bildersuche nichts passenden gefunden. Hat wer nen guten Tipp/Suchbegriff für mich? :-) Danke!
Angehängte Dateien:
-

anschluss.jpg
42 KB
also schmierung sicher nicht, dann würd da eher ein schmiernippel sein. So wie kanasta schon richtig gesagt hat ist das aber eher ein bauchnabel, also vielleicht um das lager vorzuspannen...
Kein Schmiernippel. Lager mit Befestigungsmöglichkeit eines Sensors oder so. Wie kommt man dazu, solche Fragen zu stellen, Bedienungsanleitung des Robbys verloren und Firma ist zu pleite um eine neue zu kaufen ?
...einfach abschrauben und nachsehen, war sowieso schon mal offen...vielleicht springt dabei auch ne Murmel und ne Feder weg, dann hat man die A...arte
das ist ein ventil, damit der roboter dampf ablassen kann.
MaWin schrieb: > Wie kommt man dazu, solche Fragen zu stellen, Bedienungsanleitung des > Robbys verloren und Firma ist zu pleite um eine neue zu kaufen ? jep genau das isses. die firma hat keine anleitung mehr, das ding ist >20 jahre alt und wurde von wem anders übernommen der die anleitung auch weggeworfen hatte. und jetzt soll ich herausfinden wie das ding funktioniert!
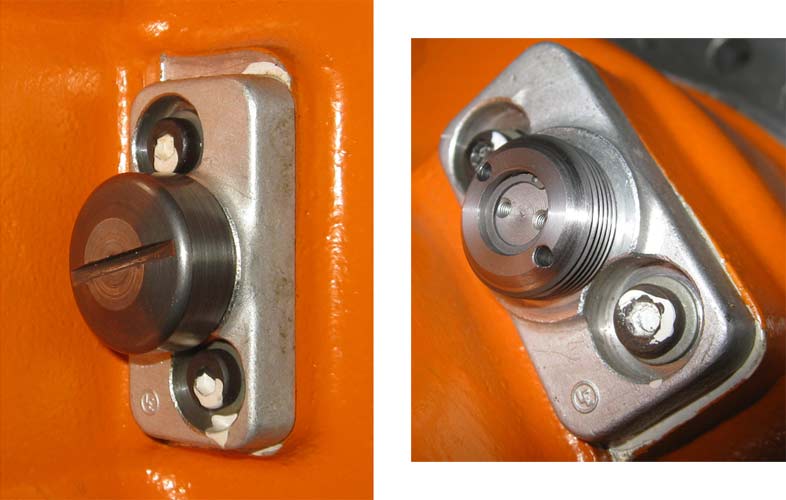
Hallo, das ist der Anschluss für einen Messtaster mit dem bie den Kuka Robotern die Nullposition des Roboters festgelegt wird. Nach einem Motor oder Getriebetausch, oder einer versehentlichen Bewegung des Roboterarmes von außen, musst diese Justage durchgeführt werden, damit die Streuung wieder weiß in welcher Lager der Arm genau ist. Die aller meisten Kukas haben nämlich keine Absolutwertgeber auf den Achsen, sondern nur Inkrementalgeber auf den Motorwellen der Antreibe. Also, kein Fett rein drücken, Deckel drauf lassen, die Befestigungsschrauben nicht lockern! Grüße Flo PS: Siehe auch Seite 38 diese PDFs: https://www.elektronikschule.de/fachschule/ta/2004/mat/praster/Lektionenkatalog_KUKA_Anwender.pdf
Hallo meckerziege, Das ist ein mechanisches Lager mit justierbarem Spielausgleich. Sitzt vermutlich an Achse 1 oder Achse 2 des Robbi. Was ist das fuer ein Roboter? Kenne diese Marke nicht. An meinen Fanuc, ABB und Kuka ist sowas in dieser Form nicht vorhanden. Gruss Michael
Hallo Florian, > das ist der Anschluss für einen Messtaster mit dem bie den Kuka Robotern > die Nullposition des Roboters festgelegt wird. Nach einem Motor oder Ich habe hier 3 Kukas und keiner hat sowas..... wo waere das zu finden?
Hallo Michael > Ich habe hier 3 Kukas und keiner hat sowas Komisch. Ich denke, bis auf die ganz neuen z.B. den Lightweight Robot hätten die das eigentlich alle. Es gibt bei jeder Ache so einen Anschluss. Für die Achse 1 z.B. sitzt der i.A. hinten rechts, nicht auf dem Sockel, sondern auf dem Teil der sich dreht. Die Position der Messpunkte ist bei allen Achse unterschiedlich, mal näher an der Drehachse, mal weiter weg. Achse 5 ist besonders gemein, da sitzt der unter einem orange lackierten Deckel. Hier sieht man die auf Achse 3 und 4 ganz gut und den von Achse 1 kann man erahnen: http://www.kuka-systems.com/NR/rdonlyres/ED2CE7E0-0F36-46FA-A060-4A04DFD4B755/13198/picPR20100222MitKUKAinsWeltall_S0696_032.jpg Und hier sieht man 1, 3, 4 und 5 oder 6 (das ist eine andere Ausführung als bei meinem). Damit das finden in diesem Bild nicht so leicht ist, sind die Messpunkte hier aber orange lackiert worden: http://www.eurobots.net/files/det_929_VKR30-2--used_robot.jpg Grüße Flo
{kind=link}
{kind=link}
Florian Rist schrieb: > Komisch. Ich denke, bis auf die ganz neuen z.B. den Lightweight Robot > hätten die das eigentlich alle. Hallo FLorian! Super, danke! Wieder was gelernt, war an den Maschinen und habe die Teile glatt gefunden! Dein Link war sehr hilfreich! Nochmal danke! Michael
meckerziege schrieb: > jep genau das isses. die firma hat keine anleitung mehr, das ding ist >>20 jahre alt und wurde von wem anders übernommen der die anleitung auch 20 Jahre sind fuer einen Roboter nicht viel...zumindest wenn es kein Noname ist. Meinen ersten KUKA habe ich vor 15 Jahren uebernommen und da war er schon 8 Jahre alt..... Gruss Michael
Florian scheint hier als einziger wirklich Ahnung von Robotern zu haben. Scheint wohl sehr schwer zu sein beim Hersteller Daten zum Roboter zu kriegen, gringrins
Hallo, wenn euch interessiert, was wir hier mit so einem Roboter z.B. machen, schaut auch mal die Bilder an: http://www.castyourart.com/presse-phantomak/printfotos/ Grüße Flo
Interessant, ein Bekannter von mir fräst mit einem Roboter Architekturmodelle mit seinen Studis und Rampf ist bei mir um die Ecke...
Hallo, danke für die guten Infos! :-) Beim Roboter handelt es sich übrigens um einen Kuka-Roboter. Nachdem die Steuerung defekt war hat ihn eine FH wegwerfen wollen, ne andere Uni hat ihn dann aber übernommen. Und ich bin jetzt dafür zuständig ne neue Steuerung zu bauen und das Ding wieder in Betrieb zu nehmen (allerdings zu einem ganz anderen Zweck als er mal vorgesehen war, deshalb kommt man da auch mit Standardsteuerungen nicht weit...). Zu den Motoren: Diese verfügen keine direkten Absolutwertgeber. Es gibt Resolver, mit denen kann man die Motorposition (relativ) mit ca. 1/4 Grad genau bestimmen. Endschalter und irgendnen anderen (relativen) Sensor gibts auch noch, aber die muss ich erst noch testen. Dahingehen hilft mir die Info wie man die Absolutposition feststellt sehr viel weiter! Danke nochmal! :-)
Hallo meckerziege, meld dich doch mal per Mail bie mir. Klingt interessant, was Du da vor hast. Eine Andere Steuerung hätt ich auch gern. Was die Nullposition angeht: Unter diese Abdeckkappe liegt ein verschieblicher Kolben (man sieht ihn auf deinem zweiten Bild), am unteren Ende diese Kolbens ist ein Kegel, der lässt sich in eine v-förmige Nut hineindrücken. Die Nulllage ist erreicht, wenn der Kolben maximal tief in dieser Nut ist. An den Achsen 1-3 kann man das bei den meisten Roboter eigentlich ganz gut sehen. Einfach den Kolben mal mit einem Kugelschreiber oder so runterdrücken, dann kommt am anderen Ende der Kegel zum Vorschein. Man kann sich jetzt einen kleinen Adapter für eine Messuhr bauen, und sich so die Kolbenlage anzeigen lassen, so kann man das Minimum einigermaßen leicht finden. Natürlich kann man so ein Teil auch von Kuka kaufen. Alternativ dazu gibts noch eine elektronische Lösung (EMT bei Kuka), da wird immer auf einer bestimmten Position an der Flanke der V-Nut ein Schaltsignal ausgelöst und der Roboter rechnet sich daraus die Mitte aus und weiß dann so wo Null ist. Wobei "Null" nicht immer Null ist das kann auch mal -90° sein und ist auch von Achse zu Achse verschieden. Wie Kuka das sieht kann Dir aber Egal sein, wenn Du eh die Kuka Steuerung nicht verwendest. Sicher brauchst Du aber auch irgend so eine Null- bzw. Referenzposition - es sei denn Du Baust Absolutwertgeber auf alle Achsen. Noch was zur Kinematik: Es müsste zu jedem Kuka Roboter eine Datei geben, in die Kinematik gespeichert ist, also die Matrizen, mit denen man die Vorwärtskinematik ausrechnen kann. Die könntest Du sicher auch gut brauchen, sonst musst Du den ganzen Roboter neu vermessen. Vielleicht kann man die auch von Kuka wieder bekommen. Grüße Flo
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.