Grüß euch. Also wie der Titel schon sagt hab ich ein Problem mit Servos. Und zwar zittern diese. Ich verwende den Hardware PWM des ATmega88PA und den internen Oszillator. Getestet auf dem STK500. Ich hab 2 Videos gemacht: http://www.youtube.com/watch?v=Sc67ES0nSdA Hier sieht man schon wie die Flanke mal hin und her hüpft. Außerdem gibt es diese Spikes die ich mir absolut nich erklären kann... Das Blaue Signal ist die Versorgungspannung des STK500. http://www.youtube.com/watch?v=Bnbrc5MMyXE Hier sieht man wie der High Pegel schwankt. Servos: Graupner DES 657BB Ich weiß leider nicht wie man das in den Griff bekommt :(! Lg
Versuch erst mal deine Probleme mit der Versorgungsspannung in den Griff zu kriegen. * Eigene Stromversorgung für das Servo * Wenn das nicht geht, ein paar Elkos und kleinere Kondensatoren auf das Problem los lassen
Ok. Aber ich dachte mir, dass das STK500 eine gute Versorgung hat oder nicht? Wenn kein Servo oben hängt sind es genau 5V und bleibt total konstant....
Das sieht nach einem Versatz um nur 1 Pixel aus, ein üblicher DSO Anzeigefehler wegen Abtastung im Zeitintervall. Zittert dein Servo auch ? Normalerweise haben Servos eine Totzeit. Das Zittern kommt dann eher weil die Rückmeldung per Poti durch Störungen der Versorgungsspannung gestört sind, apssiert also auch wenn dein Signal z.B. von einem NE555 käme.
Servobrummer schrieb: > Ok. Aber ich dachte mir, dass das STK500 eine gute Versorgung hat oder > nicht? Wenn kein Servo oben hängt sind es genau 5V und bleibt total > konstant.... In Servos sind Motoren drinnen. Und Motoren können echte 'Dreckschweine' sein, wenn es darum geht die Versorgungsspannung zu versauen.
Ok. Gehen wir die Sache anders an. Selbst wenn ich nur den Controller im STK500 habe und ich mir die PWM anschaue dann ist diese nicht so exakt wie sie sein sollte. Ich dachte eig. das der Hardware PWM sehr genau ist.... Hier noch mal ein Video wo jetzt nur der Controller am STK hängt: http://www.youtube.com/watch?v=DkAETRJtIiQ Und hier noch ein mal mit höherer Auflösung (25µs/Div): http://www.youtube.com/watch?v=tAXke2pwoPI Und ja, es schwankt um nicht viel, aber es reicht um Digi Servos zittern und Analog Servos brummen zu lassen. Ich mein wenn ich mir die Servos in meinem Flieger anschau dann sind die BOMBENFEST. Ich hab ja die Ungenauigkeit des internen Oszillators im Verdacht...
Hier mal mit Nachleuchte: Da sieht man, dass es um die 10µs schwankt: http://www.youtube.com/watch?v=fl-Hkm5AG08 Außerdem, bei jeder negativen Flanke geht das Signal auf bis zu -2,5V. Woher kommen die denn? Artefakt? Lg
MaWin schrieb: > Das sieht nach einem Versatz um nur 1 Pixel aus, > ein üblicher DSO Anzeigefehler wegen Abtastung > im Zeitintervall. Ich denke nicht. Das sind einfach Spikes die durch schlechte Abblockung der Versorgungsspannung herrühren. Da würde ich zuerst versuchen geschickt Kondensatoren zu verbauen. Aber wo die hinmüssen, kann man erst sagen, wenn der TO mehr über seinen Aufbau zeigt. EDIT: Der Fehler könnte auch nur ein Messfehler sein. Allerdings nur, wenn da wirklich steile Flanken im Spiel sind: Schaltung zeigen! EDIT2: Ich würde auch nicht die Versorgung des STK500 benutzen um ein Servo zu versorgen...
@ Servobrummer (Gast) >wie sie sein sollte. Ich dachte eig. das der Hardware PWM sehr genau >ist.... Das ist sie auch. Auf den Takt genau. >Hier noch mal ein Video wo jetzt nur der Controller am STK hängt: >http://www.youtube.com/watch?v=DkAETRJtIiQ >Und hier noch ein mal mit höherer Auflösung (25µs/Div): >http://www.youtube.com/watch?v=tAXke2pwoPI Neue Medien schön und gut, aber man kann es auch übertreiben. >Und ja, es schwankt um nicht viel, aber es reicht um Digi Servos zittern >und Analog Servos brummen zu lassen. Dann ist was faul. >Ungenauigkeit des internen Oszillators im Verdacht... Zittern des Servosignal ist Jitter. Der kommt nicht durch UNGENAUIGKEIT sondern Instabilität des Taktgebers. Nutze probehalber mal einen Quarz als Taktquelle, da darf dann wirklich GAR NICHTS mehr jittern. MFG Falk
Danke für eure Hilfe! Es geht hier jetzt gar nicht mehr um ein Servo. Sondern generell um die PWM die vom Timer1 erzeugt wird. Die sollte doch genau sein. Das ist sie aber nicht. Die schwankt um +/-6µs. Und ein delta von 12µs können die Digi Servos anscheinend auflösen und zittern dadurch. Schaltung --> Stk 500. Entwicklerboard lg
Servobrummer schrieb: > Danke für eure Hilfe! > > Es geht hier jetzt gar nicht mehr um ein Servo. Hä? Hast du jetzt ein Servo dran oder nicht? Wo und wie misst du? > Schaltung --> Stk 500. Entwicklerboard Scherzkeks. Mit einem gescheiten Bild deines Aufbaus hättest du schon die eine oder andere Frage hier vermeiden können. So stiftest du nur noch mehr Verwirrung.
Falk Brunner schrieb: > Neue Medien schön und gut, aber man kann es auch übertreiben. Gut, das ist jetzt Geschmackssache. Ich wollte das Problem einfach veranschaulichen. Und nach einiger Zeit kommt man dann drauf was man besser machen könnte. Also ich generiere damit sicher keine Klicks, falls du diese Sorge hast^^. Falk Brunner schrieb: > Zittern des Servosignal ist Jitter. Der kommt nicht durch UNGENAUIGKEIT > sondern Instabilität des Taktgebers. Nutze probehalber mal einen Quarz > als Taktquelle, da darf dann wirklich GAR NICHTS mehr jittern. Ok, meintewegen. Dann also Instabilität. Aber da du generell nicht widersprichst denk ich, dass es der interne Taktgeber durchaus sein kann. Dann werd ich das mal testen. lg
Simon K. schrieb: > Hä? Hast du jetzt ein Servo dran oder nicht? Wo und wie misst du? Nein. Kein Servo mehr drannen. Es geht jetzt nur um den im Sleep befindlichen Controller der eine´unbelastet PWM erzeugen soll. Sleep deswegen um sicher zu stellen, dass da nix anderes reinpfuscht. Schaltung: GND des Oszis mit GND des STK500 verbunden und dann einfach den Signaleingang mit dem Pin PB2 des Controllers verbunden. Das ist alles. Simon K. schrieb: > So stiftest du nur noch mehr Verwirrung. War nicht meine Absicht :(! Sry. lg
So wird der Timer1 initialisiert.
1 | void Timer1_init(void) // Configre for PWM (2 Channels) and 20ms Overflow |
2 | {
|
3 | // Clear OC1A/OC1B on Compare Match, set OC1A/OC1B at BOTTOM
|
4 | TCCR1A |= (1<<COM1A1) | (1<<COM1B1) | (1<<WGM11); |
5 | // Compare Output Mode, Fast PWM (TOP = ICR1) | CPU_Clock/8
|
6 | TCCR1B |= (1<<WGM13) | (1<<WGM12) | (1<<CS11); |
7 | // Overflow enabled
|
8 | TIMSK1 |= (1<<TOIE1); |
9 | |
10 | |
11 | // TOP Value --> 20ms Frametime
|
12 | ICR1 = Frame_time; |
13 | // OCR1A default Value --> 1ms
|
14 | OCR1A = Lower_end; |
15 | // OCR1B default Value --> 1ms
|
16 | OCR1B = Lower_end; |
17 | }
|
Servobrummer schrieb: > Schaltung: > GND des Oszis mit GND des STK500 verbunden und dann einfach den > Signaleingang mit dem Pin PB2 des Controllers verbunden. Schaltungen als Text angeben ist wenig sinnvoll. Mach ein Bild davon, wo du das Oszilloskop angeschlossen hast. Wenn du tatsächlich am STK500 herummisst, können die Spikes nur ein Messfehler sein. Was ist daran so schwer ein Bild zu machen? Für ein Video hats ja offenbar gereicht. Ich vermute mal du hast die Tastkopfklemme (Masse) irgendwo an der einen Seite des Boards angeschlossen und misst an der anderen Seite das PWM Signal. Oder benutzt du nicht mal einen Tastkopf? > Das ist alles. Nicht eingestehen zu wollen, dass man selbst einen Fehler gemacht hat, ist der beste Weg den Fehler nicht zu finden. Der Jitter der PWM wird, wie schon hier vermutet, vermutlich von dem internen RC Takt generiert.
Angehängte Dateien:
-

Unbenannt.JPG
83 KB -

photo_1_.JPG
440 KB
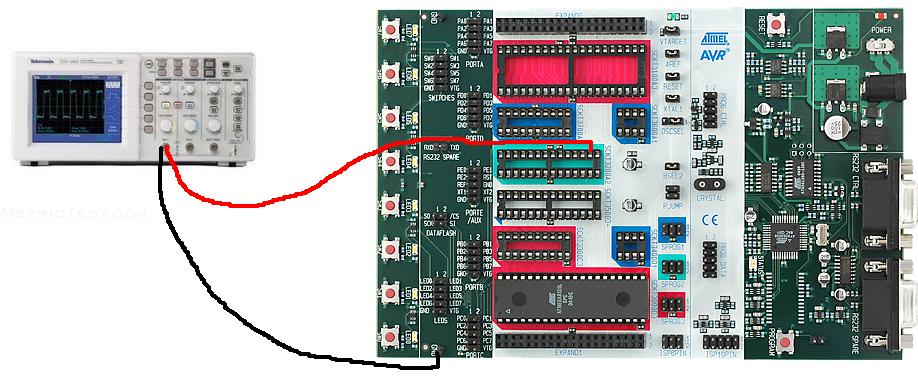
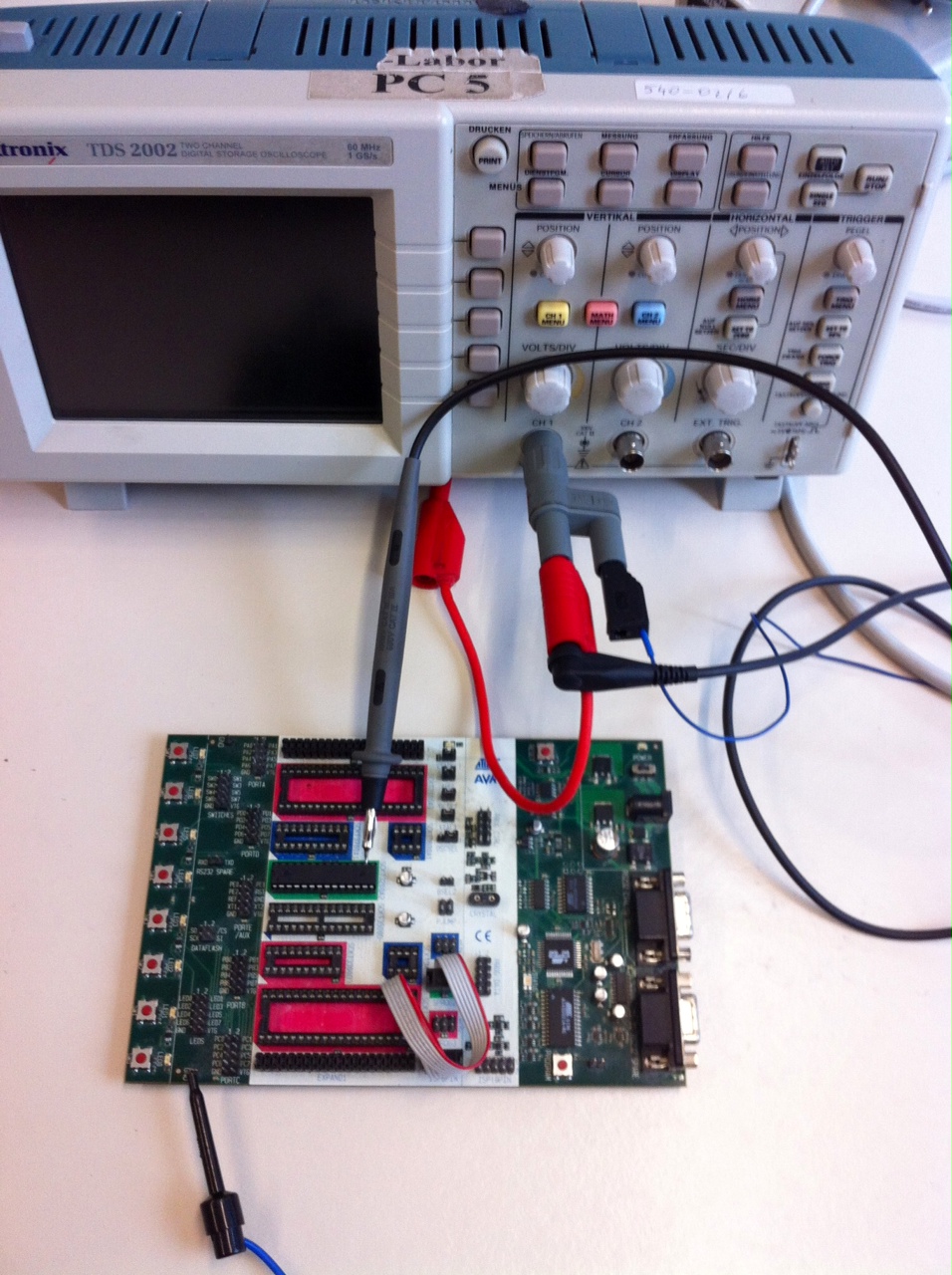
Simon K. schrieb: > Schaltungen als Text angeben ist wenig sinnvoll. > Mach ein Bild davon, wo du das Oszilloskop angeschlossen hast. Wenn du > tatsächlich am STK500 herummisst, können die Spikes nur ein Messfehler > sein. Hab ich nun Angehängt. Das ist wirklich alles. Ich versuch hier nicht um den heißen Brei zu reden oder von meiner Inkompetenz abzulenken. Wenn da wirklich ein Fehler ist dann bin ich nur froh. Denn dann geht was weiter. Simon K. schrieb: > Oder benutzt du nicht mal einen Tastkopf? Kein Tastkopf. Wozu? Im Anhang noch mal ein Bild. Natürlich halte ich die Messspitze beim messen. Nur für das Foto. Lg
> Im Anhang noch mal ein Bild. Autsch. Natürlich darf die Masseleitung nicht 1 Meter lang irgendwo rumschlappen bis sie dann irgendwo auf das Bard trifft, und die Messleitung woanders 1 Meter lang rumschlappen bevor man dann den Messpunkt erreicht. Nicht ohne Grund haben Messpitzen einen Masseclip, und meinen viele Leute, deren 10cm Draht wäre deutlich zu lang. Aber mit deinem Messproblem hat das meiner Meinung nach nichts zu tun. http://cds.linear.com/docs/Application%20Note/an118fa.pdf http://www.signalintegrity.com/Pubs/straight/probes.htm http://emcesd.com/1ghzprob.htm
Und da ist auch der Grund für die Spikes. Mit deinen zwei Messleitungen hast du wunderbar eine große Schleife gelegt, wo die Schaltung mittendrin liegt. Die Schleife hat eine gewisse Induktivität, der Oszilloskopeingang eine Kapazität und wenn du jetzt eine scharfe Flanke da einspeist, hast du einen Schwingkreis und dadurch diese Spikes. Benutze einen Tastkopf mit Masseklemme. Es hat auch einen Grund, warum das Kabel mit der Masseklemme so kurz ist. Am besten ist es die Massefeder zu benutzen. Also das Masseklemmenkabel abzumachen und vorne auf den Tastkopf eine Massefeder aufzuschieben, die dann direkt neben der Messstelle die Masse kontaktiert. Die Massefeder brauchst du aber wirklich nur bei teuflischen Anstiegszeiten. Mit einem Oszilloskop korrekt zu messen ist eben schwieriger als mit einem Multimeter.
Nimm noch mal die Versorgungsspannung bei deinen Videos mit dazu. Auf deinem allerersten Video sieht man, dass fast jedesmal, wenn es im PWM Signal einen Glitch gibt, es auch in der Versorgungsspannung rappelt. Ich denke, da sind mehrere Effekte gleichzeitig zu Gange.
Kleiner Tipp noch: Störungen auf der Versorgungsspannung kannst du am einfachsten Messen, wenn du den Eingang auf AC-Kopplung stellst und dann die Empfindlichkeit hochdrehst (z.B. 10mV/div).
Simon K. schrieb: > Und da ist auch der Grund für die Spikes. Da habt ihr wohl recht. Das hab ich wohl total unterschätzt :(! Werde es beim nächsten mal besser machen! Danke für eure Hinweise. Simon K. schrieb: > Die Massefeder brauchst du aber wirklich nur bei teuflischen > Anstiegszeiten. Ja ich glaube ganz so schlimm ist es bei mir nicht :D! Jedoch hat das alles keinen Einfluss auf mein eigentliches Problem. Werde erst wieder nächste Woche dazu kommen weiter zu versuchen. Karl Heinz Buchegger schrieb: > Auf deinem allerersten Video sieht man, dass fast jedesmal, wenn es im > PWM Signal einen Glitch gibt, es auch in der Versorgungsspannung > rappelt. Da war auch noch der Servo dabei. Ich denke, dass das ständige Anlaufe des Motors da mit rein gepfuscht hat. Danke noch mal an alle! Lg
Servobrummer schrieb: > http://www.youtube.com/watch?v=Bnbrc5MMyXE > Hier sieht man wie der High Pegel schwankt. Wie wäre es mit einem sauberen Trigger auf die Störung und einem aussagekräftigen Screen Shot, statt die Welt mit wackelnden Videos vollzusülzen. Hat das DSO keinen zweiten Kanal, um z.B. parallel zu Störung die Stabilität der Versorgungsspannung zu überwachen?
Hi Mit einem ordentlichen Netzteil (12V/1A) ist kann man durchaus Servos zitterfrei am STK500 betreiben. Eigene Erfahrung. MfG Spess
Manchmal hilft ja schon ein Widerstand (etwa 1 k) in der Impulsleitung, das Zittern einiger billiger Servos abzustellen... ...
µC-Bastler schrieb: > Wie wäre es mit einem sauberen Trigger auf die Störung und einem > aussagekräftigen Screen Shot, statt die Welt mit wackelnden Videos > vollzusülzen. > Hat das DSO keinen zweiten Kanal, um z.B. parallel zu Störung die > Stabilität der Versorgungsspannung zu überwachen? Schau doch bitte mal die anderen Videos an. Ich hab wirklich viele unterschiedliche Kombinationen probiert. Nicht nur dieses eine Video... spess53 schrieb: > Mit einem ordentlichen Netzteil (12V/1A) ist kann man durchaus Servos > zitterfrei am STK500 betreiben. Eigene Erfahrung. Also, dass ist meiner Meinung nach auch nicht das Problem. Das Problem ist das die Hardware PWM sehr ungenau ist. Deswegen zittert das Servo. Es ist nicht die Versorgung. Hannes Lux schrieb: > Manchmal hilft ja schon ein Widerstand (etwa 1 k) in der Impulsleitung, > das Zittern einiger billiger Servos abzustellen... Ich denke nicht, dass das die Lösung des Problems ist. Wie kann ein Widerstand so eine Instabilität des internen Oszillators kompensieren? Lg
Hi >>spess53 schrieb: >> Mit einem ordentlichen Netzteil (12V/1A) ist kann man durchaus Servos >> zitterfrei am STK500 betreiben. Eigene Erfahrung. >Also, dass ist meiner Meinung nach auch nicht das Problem. Das Problem >ist das die Hardware PWM sehr ungenau ist. Deswegen zittert das Servo. >Es ist nicht die Versorgung. Unsinn. Die steht wie ein Ast. Das Gewackel in deinen Filmchen liegt an deinem suboptimalen Messaufbau. MfG Spess
spess53 schrieb: > Unsinn. Die steht wie ein Ast. Das Gewackel in deinen Filmchen liegt an > deinem suboptimalen Messaufbau. Meinst du wirklich? Kann mir nicht vorstellen, dass der Messaufbau schuld an einer zeitlichen Verschiebung ist. Zeigt doch ganz eindeutig, dass die PWM ungenau ist. Ich hab das Servo auf mit einem Labornetzeil versorgt. Da gabs keinen Unterschied. Leider. lg
Das Zittern liegt am internen Oszillator. Die Spikes am Messaufbau.
Jup. Aber woher kommt diese Instabilität des Oszillators? Sind die wirklich so "schlecht"?
Servobrummer schrieb: > Jup. > > > Aber woher kommt diese Instabilität des Oszillators? Sind die wirklich > so "schlecht"? Ja. Erwärme den Controller einfach mal.
Das hört man ja auch so gern von Leuten die PIC's verwenden. Aber deren Oszillator taugt anscheinend was^^.
Für einfache Anwendungen reicht so ein RC Oszillator locker. Nur wenn man einen stabilen Takt braucht, muss man eben was anderes nehmen.
Servobrummer schrieb: > Aber woher kommt diese Instabilität des Oszillators? Sind die wirklich > so "schlecht"? Wenn deine Versorgungsspannung stabil am µC ankommt, kannst du doch einfach mal den Servo abnehmen und dir das Steuersignal angucken. Dann mißt du den Jitter aus und setzt die Wackelei in Relation zu Periode. Probeweise kannst du das ganze auch über einen Quarzoszillator laufen lassen und damit gucken, ob es am RC-Oszillator liegt.
@ Servobrummer (Gast) >Aber woher kommt diese Instabilität des Oszillators? Sind die wirklich >so "schlecht"? Jain. Das Problem ist die Kurzzeitstabilität, die ist halt nur so lala. Für eine Handvoll Takte ist das Timing schon recht genau und stabil, wenn es aber über hunderte bis tausend Takte geht, konnt halt Jitter bzw. Phasendrift (Wander) hinzu. Denk dran, dein AVR läuft mit 1MHZ, macht 1000 Takte für 1ms. Kann man mit deinem DSO einfach und solide messen. Wie? Signal sauber messen, mit 10:1 Tastkopf, Masse direkt am Controller verbunden, damit das Signal erstmal sauber im DSO landet. Dann auf das Signal der steigenden Flanke triggern. Dann die fallende Flanke zentral auf den Bildschirm drehen und die Zeitauflösung auf 1-10µs/DIV stellen. Jetzt sieht man, wie kurzzeitstabil deine Taktquelle ist. Ein Quarz ist hier superstabil, da zappelt selbet bei 10ns/DIV nix. Ein RC-Oszillator deutlich mehr. MFG Falk
Falk Brunner schrieb: > Denk dran, dein AVR läuft mit 1MHZ, > macht 1000 Takte für 1ms. Sind sogar 8Mhz ;)! Aber ich seh schon. Das wäre ev. zu viel gefordert. Im Grunde sind die AVR's ja super Controller. Falk Brunner schrieb: > Signal sauber messen, mit 10:1 Tastkopf, Masse direkt am > Controller verbunden, damit das Signal erstmal sauber im DSO landet. Aber wo greife ich den internen Takt ab? Ist das die Fuse die ich setzten muss? Heißt irgendwas mit "Takt am PINX ausgeben..."? lg
@Servobrummer (Gast)
>Aber wo greife ich den internen Takt ab?
Brauchst du nicht, miss einfach dein PWM-Signal.
MFG
Falk
Ich hatte ähnliche Probleme mit einer instabilen PWM. Gelöst habe ich sie, indem ich (auch mit dem STK500) einfach einen 4MHz-Quarz aufs Board draufgesteckt habe. Seitdem keine Probleme mehr mit Jitter oder Drift. Ich denke bei all den Diskussionen wäre es ein Leichtes, eben mal die Sache mit Quarz und Tastkopf auszuprobieren. Es ist ja kein komplizierter Messaufbau... Es lohnt sich auf jeden Fall, die paar Cents für einen Quarz und die Kondensatoren gegen Masse auszugeben :) Gruß Sebastian
Sebastian schrieb: > Ich hatte ähnliche Probleme mit einer instabilen PWM. Gelöst habe ich > sie, indem ich (auch mit dem STK500) einfach einen 4MHz-Quarz aufs Board > draufgesteckt habe. Seitdem keine Probleme mehr mit Jitter oder Drift. > Ich denke bei all den Diskussionen wäre es ein Leichtes, eben mal die > Sache mit Quarz und Tastkopf auszuprobieren. Es ist ja kein > komplizierter Messaufbau... > Es lohnt sich auf jeden Fall, die paar Cents für einen Quarz und die > Kondensatoren gegen Masse auszugeben :) > > Gruß > Sebastian Ich hatte bisher noch nie Probleme mit dem Taktgeber des STK500. Der wird schon von einer Quarzfrequenz abgeleitet. Ein Unterschied macht natürlich der RC-Taktgeber des Controllers...
servo zittert => extra stromversorgung für den servo machen. ein widerstand in der pwm-leitung schadet auch nicht. der interne oszillator von nem atmega ist temperatur- und spannungsabhängig - letzteres könnte hier stören. wenn der servo kurz strom zieht (gerne mal ~1A nach jedem puls) bricht die spannung ein, atmega läuft dann langsamer, pwm-signal wird länger. ausserdem stört nen spannungeinbruch wie oben erwähnt den internen regler eines servos. nebenbei bemerkt: die videos sind nicht so toll gemacht ;)
Washington I. schrieb: > servo zittert => extra stromversorgung für den servo machen. Vorhandene Beiträge lesen => Verstehen => Keinen pauschalen Unsinn posten. > ein widerstand in der pwm-leitung schadet auch nicht. Hat aber nichts mit dem Problem hier zu tun. > der interne oszillator von nem atmega ist temperatur- und > spannungsabhängig - letzteres könnte hier stören. Das ist nach allem bisher geschriebenen aber eher unwahrscheinlich. > wenn der servo kurz strom zieht (gerne mal ~1A nach jedem puls) bricht > die spannung ein, atmega läuft dann langsamer, pwm-signal wird länger. > ausserdem stört nen spannungeinbruch wie oben erwähnt den internen > regler eines servos. Das stimmt schon, allerdings ist das Problem auch ohne Servo vorhanden, wie schon geschrieben. > nebenbei bemerkt: die videos sind nicht so toll gemacht ;) Nicht nur das, sie sind auch noch unnötig um sowas zu zeigen. Ein Aufbau wie Falk in oben erwähnte zusammen mit unendlichem Nachleuchten am DSO und als Bild exportieren hätte schon gereicht.
Sebastian schrieb: > Es lohnt sich auf jeden Fall, die paar Cents für einen Quarz und die > Kondensatoren gegen Masse auszugeben :) Die Cents sind nicht das Problem, eher die Verfügbarkeit zu dem Zeitpunkt ;)! Werd aber in der Woche sicherlich einen Test mit Quarz machen. Washington I. schrieb: > nebenbei bemerkt: die videos sind nicht so toll gemacht ;) Simon K. schrieb: > Nicht nur das, sie sind auch noch unnötig um sowas zu zeigen. Ein Aufbau > wie Falk in oben erwähnte zusammen mit unendlichem Nachleuchten am DSO > und als Bild exportieren hätte schon gereicht. Wow, ich wusste nicht das Videos als "Totsünde" gelten oO. Da ich leider keine Software habe um den Screenshot vom Oszi direkt auf den PC zu spielen musste ich mir etwas anderes einfallen lassen ;)! lg
Sodale. Ihr hattet natürlich recht. Jetzt mit einem 8MHz Quarz getestet. Die PWM ist wie in Stein gemeiselt, kein Servo zittern oder gar brummen, herrlich. Dieses Mal hab ich sogar einen Tastkopf verwendet ;)! Die Spikes waren auch nicht mehr zu sehen. Danke @ all. lg
Servobrummer schrieb: > Washington I. schrieb: >> nebenbei bemerkt: die videos sind nicht so toll gemacht ;) > Simon K. schrieb: >> Nicht nur das, sie sind auch noch unnötig um sowas zu zeigen. Ein Aufbau >> wie Falk in oben erwähnte zusammen mit unendlichem Nachleuchten am DSO >> und als Bild exportieren hätte schon gereicht. > > Wow, ich wusste nicht das Videos als "Totsünde" gelten oO. > Da ich leider keine Software habe um den Screenshot vom Oszi direkt auf > den PC zu spielen musste ich mir etwas anderes einfallen lassen ;)! Najaa, Todsünde nicht. Das hast du jetzt in den falschen Hals bekommen ;-) Ich bin gerade auf der Arbeit und kann (will) mir die Videos nicht angucken, aber war das nicht ein DSO? Nicht sogar eines der Rigols? Da gibts Software um den Screenshot zu übertragen. Ansonsten via USB Stick direkt am Scope abspeichern.
Angehängte Dateien:
-

Unbenannt.JPG
6,6 KB
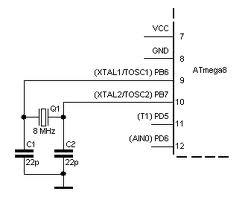
Simon K. schrieb: > ...aber war das nicht ein DSO? Das Oszi ist ein Tektronix TDS2002. Kein USB. Nur seriell. Und die serielle Verbindung benötige ich für das STK500. Klar umstecken wäre auch gegangen^^. Aber ich dachte einfach, dass ein bewegtes Bild mehr sagen kann. Kurze Frage: Das Bild im Anhang. Die C Werte für die Quarzbeschaltung für den ATmega88PA sind so korrekt? Ich weiß im Bild steht ATmega8, ist aber nur schematische Darstellung. lg
Das haut schon hin. Siehe auch http://www.atmel.com/dyn/resources/prod_documents/doc2521.pdf S.12 mfg
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.