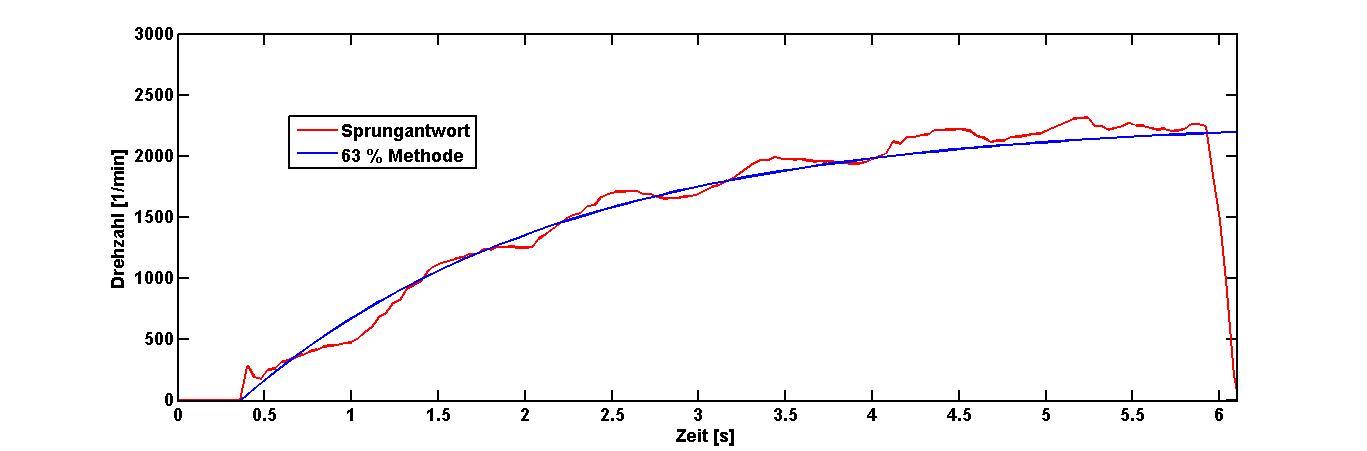
Hallo zusammen, da ich mich zur Zeit im Kreis drehe, hoffe ich, dass mir jemand hier weiterhelfen kann. Folgendes Problem: Es soll der Drehzahlregler (PI) eines Motors ausgelegt werden. Zuerst habe ich einen Stromsprung aufgegeben (siehe Anhang). Hier gab es die Vorgabe, die Regelstrecke als PT1-Glied zu approximieren. Also habe ich über das 63%-Verfahren diese in jenes Glied mit folgenden Werten approximiert: PT1-Glied: Gs(s) = (76,22 UPM/A) / (s + 0,625) Jetzt das Problem: die meisten Verfahren zur Einstellung der Reglerparameter beruhen auf den Werten Tg und Tu. Diese kann ich jedoch bei meinem PT1-Glied nicht ermitteln, da es ja keine Wendetangente und keine Totzeit gibt. Die T-Summenregel funktioniert auch nicht, da - Besonderheit des tollen Motors - maximal eine Verstärkung von Kp = 0,313 A / UPM des PI-Reglers einstellbar ist. Also nun die Idee: Wurzelortskurvenverfahren zur Ermittlung der PI-Reglerparameter. Eventuell mit einer festen Verstärkung von Kp = 0,313A / UPM eine optimale Nachstellzeit ermitteln ... das wurde mir so gesagt. Nur weiß ich nicht, wie ich nun vorgehen soll, ich hab von dem Verfahren nicht viel Ahnung..hat jemand ein Anwendungsbeispiel das vielleicht zu mir passt? Die Regelstrecke besitzt keine Nullstellen und eine Polstelle bei - 0.625 Soweit bin ich ... aber wie ich jetzt geeignete Reglerparameter ableite ... Kann jemand helfen?
Angehängte Dateien:
-

Sprungantwort.png
4,5 KB
Hi Thomas, wenn du die Zeitkonstante des Motors hast (z.B. aus deiner Approximation), kannst du doch das BODE Diagramm zeichnen. Den Regler legst du dann nach deinen Wünschen aus, so dass die Übertragungsfunktion des offenen Regelkreises deinen Anforderungen entspricht. http://www.rn-wissen.de/index.php/Regelungstechnik#PI-Regler Siehe den Abschnitt: "Dimensionierung mit dem Bodediagramm" Hilft dir das weiter?
PS: Alternativ könnte man den Weg über das "Betragsoptimum" versuchen.
Mit dem Betragsoptimum wird es denke ich nicht funktionieren, weil maximal eine Verstärkung von 0.313 A / UPM eingestellt werden kann. Das ist ja der Nachteil ... PT1-Strecken-infos: Kps = 121.95 UPM/A T = 1,6 s Hm mit dem Bodediagramm muss ich mich erstmal einarbeiten - hoffe das klappt. Habe nicht mehr ganz so viel Zeit -.- Gibts noch andere Möglichkeiten? Ist es sinnlos mit dem Wurzelortskurvenverfahren?
Thomas schrieb: > PT1-Strecken-infos: > > Kps = 121.95 UPM/A > T = 1,6 s Warum sind die Werte nun anders als in deinem ersten Beitrag, Thomas? > PT1-Glied: Gs(s) = (76,22 UPM/A) / (s + 0,625) > Hm mit dem Bodediagramm muss ich mich erstmal einarbeiten - hoffe das > klappt. Habe nicht mehr ganz so viel Zeit -.- Kennst du dich in MATLAB aus? Mittels bode() kannst du dir das BODE Diagramm zeichnen lassen. Wobei ein PT1 Glied nicht ganz so schwer sein dürfte. > Ist es sinnlos mit dem Wurzelortskurvenverfahren? Ich kenne das Wurzelortskurvenverfahren nicht, kann daher nichts zu sagen.
al3ko schrieb: >> PT1-Strecken-infos: >> >> Kps = 121.95 UPM/A >> T = 1,6 s > Warum sind die Werte nun anders als in deinem ersten Beitrag, Thomas? > >> PT1-Glied: Gs(s) = (76,22 UPM/A) / (s + 0,625) > Das sind die gleichen Werte, nur umgerechnet in die Polstellen-Darstellung: 121.95 / (1,6s + 1) = 76,22 / (s + 0.625) >> Hm mit dem Bodediagramm muss ich mich erstmal einarbeiten - hoffe das >> klappt. Habe nicht mehr ganz so viel Zeit -.- > > Kennst du dich in MATLAB aus? Mittels bode() kannst du dir das BODE > Diagramm zeichnen lassen. Wobei ein PT1 Glied nicht ganz so schwer sein > dürfte. > Meine Übertragungsfunktion habe ich in Matlab und das zeichnen ist nicht das Problem. Nur steht in der Anleitung von Wikpedia, dass man z.B. eine Verstärken Kp von 18 wählen soll, was 25 dB entspricht. Ich komm halt nicht damit klar, dass man im Motor max. 0,313 einstellen kann ..
Ich muss ganz ehrlich gestehen, dass ich dir nicht folgen kann und ziemlich verwirrt bin. Wie ist der Regler realisiert? Was mich vor allem verwundert: Kp ist für gewöhnlich die Verstärkung des Reglers. Die Verstärkung ist m.W.n. ein proportionaler Faktor ohne Einheit. Ein ganz einfacher P-Regler: u(t)=Kp*e(t) Bei dir sind es irgendwas UPM/A. Zugegeben, ich kenne mich in Motorregelung nicht wirklich aus, aber gelten da andere Gesetze? Und warum ist eure Regelverstärkung auf 0.XXX beschränkt? Ist es nicht eher so, dass die Regelverstärkung größer sein kann, aber das Stellglied einen maximalen Wert aufweist? Ist es das, wovon du sprichst? In diesem Fall handelt es sich um den Windup Effekt. Wie versiert bist du in der Regelungstechnik? Kannst du nachvollziehen, was ich geschrieben habe oder ist das alles Neuland? :) Gruß
al3ko schrieb: > Die Verstärkung ist > m.W.n. ein proportionaler Faktor ohne Einheit. Die Regelabweichung multipliziert mit dem Proportionalfaktor ergibt die Stellgröße. Die Einheit des Faktors muss also der Einheit der Stellgröße dividiert durch die Einheit der Regelabweichung entsprechen. Christian
Realisiert ist der Regler intern auf dem Motor (Engel HBI 3790) - den kann man über die serielle Schnittstelle parametrieren - es lässt sich aber für den P-Anteil nur ein Wert von 0 - 1 einstellen. Und nach einem Anruf bei der Firma sagten die mir, dass ein eingesteller Wert von 1 genau 0,313 A / UPM entspricht. Mir kommt das auch ziemlich komisch vor, aber das ist wohl so?! Naja versiert .. hm ich hatte mal die Grundlagen :) deswegen ists grad nicht so einfach hier was auszulegen ... bei diesem Sonderfall
Wenn der P-Anteil so klein ist, dann dreh ihn einmal voll auf und schaue ob die Regelstrecke eh nicht schwingt. Danach kannst du ja mit dem I-Anteil herumspielen. In deinem Fall ist die praktische Methode wohl schneller und zielführender.
Habe ich bereits probiert, die Regelstrecke führt kein Schwingen aus
Also ich soll den Reglerentwurf mit dem Wurzelortskurvenverfahren durchführen. Dazu habe ich jetzt die Regelstrecke und den Pi-Regler als Übertragungsfunktion dargestellt und mit dem sisotool aufgerufen.
1 | s = tf ('s'); % definiert den LaPlace-Operator s |
2 | Gs=tf(76.22,[1,0.625]) % Regelstrecke PT1-Glied |
3 | Gr = 0.313 *(( 1 + s) / s ) % Pi-Regler mit P = 0,313 A / UPM |
4 | |
5 | sisotool(Gs, Gr) |
Ich versteh aber jetzt noch nicht ganz, wie ich den I-Anteil bzw. Tn dort variabel gestalte. Wie geht man den allgemein vor, wenn man die vorhandene PT1-Strecke mit einem PI-Regler regeln will (mittels Wurzelortskurvenverfahren?
Angehängte Dateien:
-

Simulation.png
4,8 KB
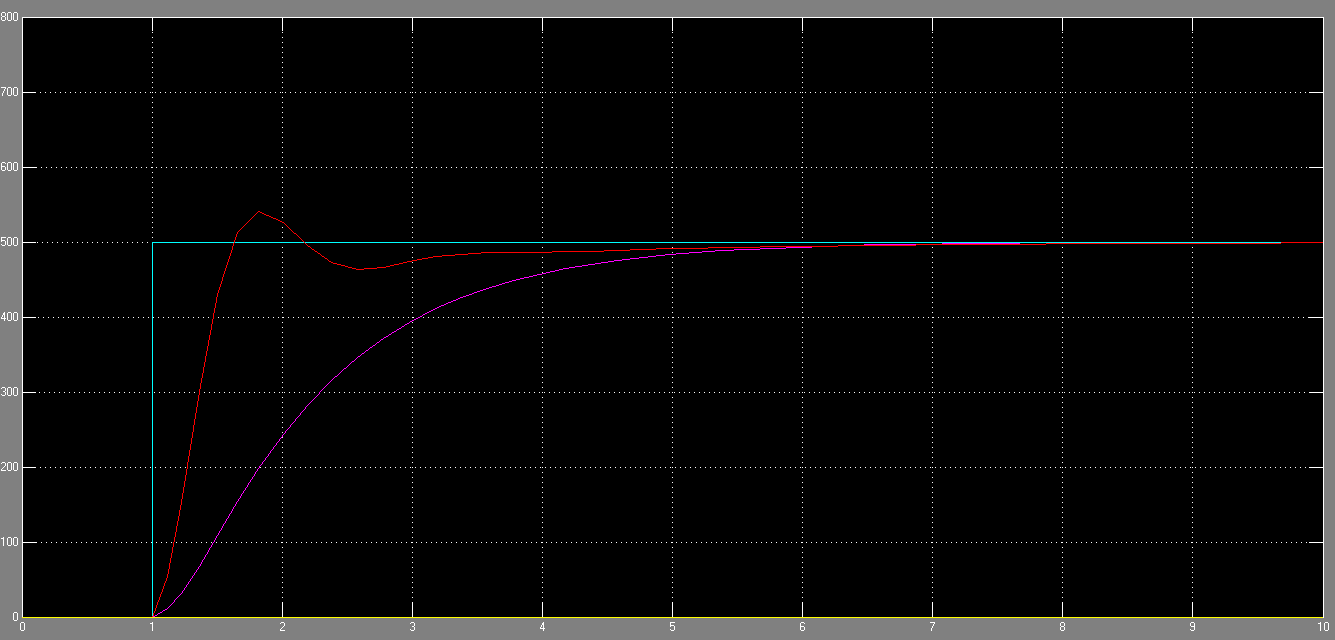
Zwischenstand: Ich habe meine Regelstrecke in ein PT2-Glied approximiert. Zeitkonstanten: T1 = 1,09 s T2 = 0,26 s Anschließend habe ich mittels Wendetangentenverfahren Tg und Tu bestimmt: Tu = 0,12 s Tg = 1,75 s Bei einem Sprung von 20,5 A stellt sich eine Drehzahl von 2750 UPM ein, folglich ist Ks = 134,15 UPM/A Über CHR (Ohne Überschwingen, Führung) habe ich nun folgende Parameter ermittelt: Kpr = 0,037 A / UPM Tn = 2,1 s Ki = Kpr / Tn = 0,017 Im Anhang befindet sich die Simulation. X-Achse: Zeit / s Y-Achse: Drehzahl / UPM Rosa = Regelstrecke ohne Regler Rot = Regler mit Regelstrecke hellblau = Drehzahlsprung auf 500 UPM Wie kann es sein, dass trozdem ein Überschwingen vorkommt, obwohl CHR ohne Überschwingen gewählt wurde?!
Christian Gudrian schrieb: > Die Einheit des Faktors muss also der Einheit der Stellgröße > dividiert durch die Einheit der Regelabweichung entsprechen. Dann kommt da auch schnell ein Zahlenfaktor mit hinein.
... schrieb: > Christian Gudrian schrieb: >> Die Einheit des Faktors muss also der Einheit der Stellgröße >> dividiert durch die Einheit der Regelabweichung entsprechen. > > Dann kommt da auch schnell ein Zahlenfaktor mit hinein. Das müsste eigentlich passen: Regelgröße: UPM z.B. Vorgabe 500 UPM Stellgröße: A z.B. 5 A Regelabweichung: ebenfalls UPM Und Kpr ergibt sich aus: 0.34 * (Tg [s] / Kps [UPM / A] * Tu [s]) Die Verstärkung der Strecke habe ich aus der Sprungantwort berechnet: 134.15 UPM/A Die Faktoren/Einheiten müssten daher doch eigentlich passen ...
Kpr hat also die Einheit A / UPM . 500 UPM kommen rein -> A kommen raus. Die Übertragungsfunktion des PT2-Gliedes sollte eigentl auch richtig sein:
1 | T_1 = 1.09; |
2 | T_2 = 0.26; |
3 | |
4 | Gs = (134.15 /((T_1*s+1)*(T_2*s+1))) |
5 | |
6 | = 134.15 / (0.2834s² + 1.35s + 1) |
Kann es sein dass der Fehler doch am PT2-Glied liegt? Meine Zeitkonstanten: T1 = 1,09s T2 = 0,26s Damit lässt sich der Dämpfungsgrad bestimmten: D = 1/2 * T1/T2 = 2,09 Mein Glied ist nur für D = 1 gültig (-> K / (T1*s+1)*(T2*s+1)) Ist das richtig? Dann müsste ich die allgemeine Formel verwenden: G(s) = K / (1 + T1*s + T2² *s²)
Servus zusammen Kann jemand von euch mir helfen, Ich habe ein Problem in Hardware dass ich ein Pt1 Glied regeln durch Mikrocontroller muss Das wäre nett von euch wenn ihr mir einen Vorschlag i. Hardware geben Es wird Pt1 Glied mit dem arduino geregelt Gruß
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.