Moin, zuersteinmal ich bin neu hier und bin nicht ganz sicher ob ich den Beitrag den richtigen bereich setze... ;) Also ich habe folgendes Problem: 1. Ich plane und baue gerade eine auf einem arduino bessierende ansteuerung für einen 24V DC getriebe motor mit einem Akku. (soll eine Hubvorrichtung werden) so jetzt habe ich es soweit, das es sich planmäßig hebt und senkt... allerdings brauche ich jetzt noch einen überlastschutz für den Getriebemotor. Dieser überlastschutz soll greifen wenn die Belastung für den Motor über einen eingestellten wert läuft! zur erklärung: Das system soll 700kg heben, der motor schafft aber mit der überstzung weit mehr. Damit aber das getriebe nicht über das maximale torsionsmoment kommt will ich das der motor vorher in eine art protekt geht. Jetzt ist die Frage wie kann ich sowas realisieren?! (hatte schon an einen shunt gedacht, weiß nur nicht wie ich davon dann ein signal bzw eine abschaltung hinbekomme) Problem nummer 2. Ich verwende einen 24V Akku aus einem e-bike! dieser ist für die anwendung nicht schlecht, allerdings habe ich das problem das wenn die spannung nach ca 160 betätigungen zu schwach wird geht er ohne jegliche vorwarnung aus und verbleibt in der position. hierfür brauch ich eine idee, wie ich frühzeitig durch beispielsweise eine LED darauf aufmerksam gemacht werde das die spannung nur noch für beispielsweise 2 betätigungen reicht um dann in einer der beiden endlagen den akku tauschen bzw laden zu können. wäre super wenn ihr ideen oder vorschläge für mich habt ;) MFG Felix
Die Idee mit dem Shunt ist richtig. Shunt mit einigen Milli-Ohm dürfte reichen. Spannung über Shunt messen, wenn zu groß abschalten. Leider fehlen Angaben zum Motor (Strom im Normal-Betrieb, bei fast Überlast) Bitte beachten: Shunt muß Strom aushalten, Leistung beachten. Beim Anlauf des Motors ist der Strom ggf. ein Mehrfaches des Normal- Stroms, die ersten (200 ms) z.B. nicht messen oder Messung verwerfen. Wenn Du an die Batterieklemmen direkt ran kommst, Spannung messen, ggf. bei Last. Die Abschaltschwelle/Alarmschwelle kann nicht zuverlässig benannt werden, ich weiß nicht was für ein Akku verwendet wird.
Angehängte Dateien:
-

Motorkenn_linie.png
260 KB
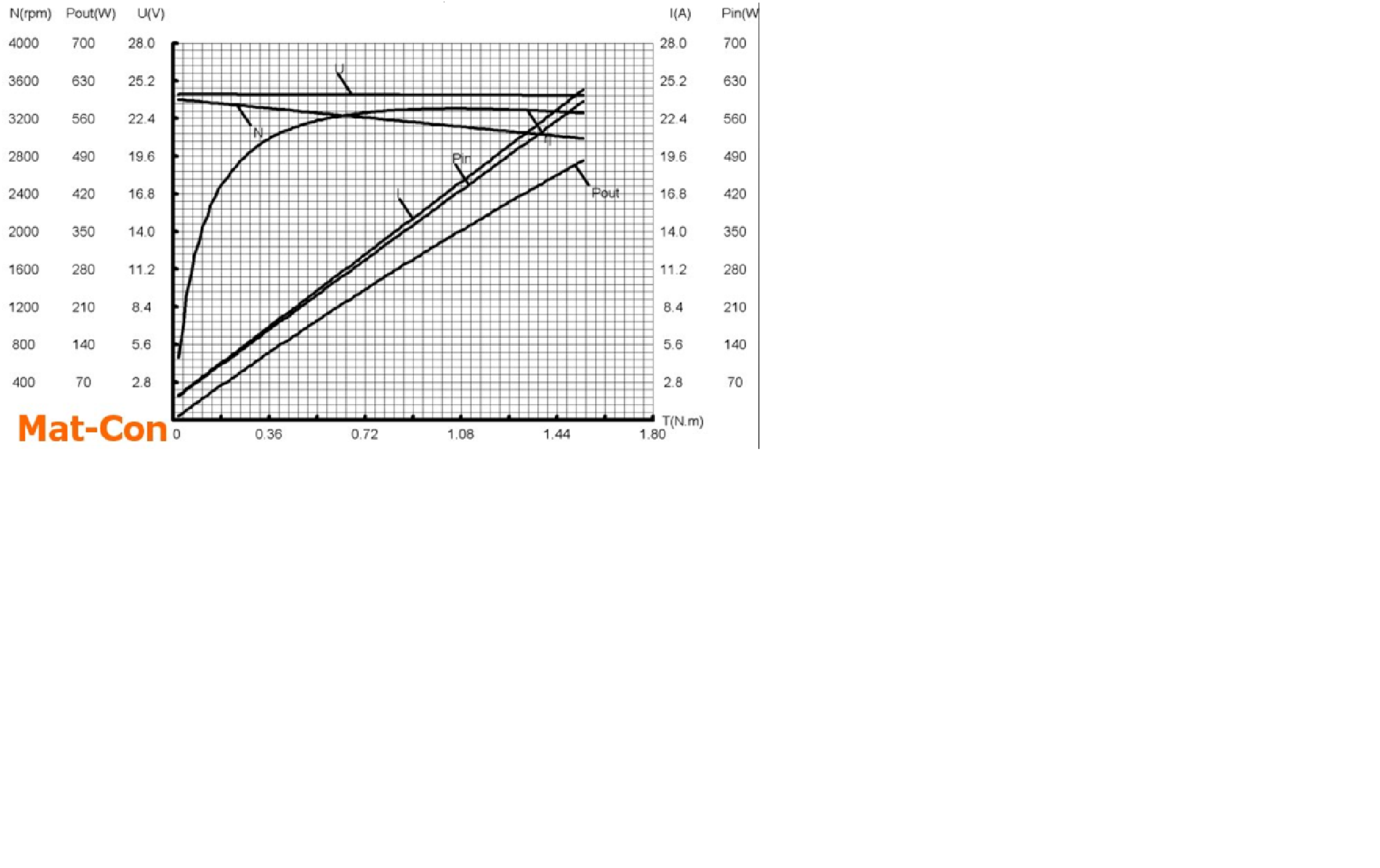
Hier nochmal die Eckdaten vom motor (was ich so ausm kopf weiß) Leistungsdaten: Ausgangsleistung 450 W / 24 V Nennstrom (=belastet) <=24 A Nenndrehzahl (=belastet) 3000 +/- 3,5 % maximale Drehzahl (=unbelastet) 3400 +/- 3,5 % Strom (= unbelastet) 0,8 – 1,8 A Drehmoment 1,43 Nm +/- 5 % Kraftübertragung über Kettenritzel (11 Zähne, Abstand 6,35 mm), wechselbar Wellendurchmesser 10 mm (Anflachung: 8,5 mm) Effizienz >=78% im anhang mal die Motorkennlinie ;) Die Technischen daten vom akku: (LiFePO4 Akku V2 24V/9,5Ah): Akkutyp: LiFePO4 Spannung: 24V bzw. 8s à 3,3V Kapazität (nominal): 9500 mAh Kapazität (entnehmbar): 9600 mAh Größe: 285mm x 85mm x 80mm Gewicht: 2187g Lebensdauer: 1800 Zyklen Belastbarkeit Zellen (Dauer): 40A Belastbarkeit Zellen (Kurzzeitig): 70A Belastbarkeit BMS (Dauer): 25A Belastbarkeit BMS (Kurzzeitig): 30A außer dem Motor hängt nur noch die steuerelektronik mit dem arduino, wechsler relais und ein bisschen kleinkram wie dioden und transistoren an dem akku was aber denke ich mal zu vernachlässigen ist!
Mit dem Shunt machst du prinzipiell eine Strommessung. Hast du Daten, Erfahrungen, Messwerte... wie der Stromverlauf beim Betrieb des Motors ist und da speziell wie man mit dem Stromverlauf die 700kg Grenze erkennen könnte? Wenn die Strommessmethode tauglich ist (Grenzwert eindeutig erkennbar), kann man einfacher an ein Design der Begrenzerschaltung gehen.
naja ich habe das system bis jetzt noch nicht voll belastet laufen lassen!! habe es bis jetzt nur auf halber belastung laufen lassen, da ich noch ein paar bauliche probleme mit der federunterstützung habe... aber bei halber belastung, sprich 300-350kg belastung für den Motor habe ich an den motorklemmen nen belastungsstrom von ca 22V gemessen...also das was von den ca 24V vom akku dann noch überbleibt. Allerdings ist das ein bisschen ungenau, da die Federn, welche das system unterstützen nicht immer mit 100% gleichbleibender kraft auf das system einwirken und daher der Motor mal mehr mal weniger eigenleistung einbringen muss!
Felix Decker schrieb: > wenn die spannung nach ca 160 betätigungen zu schwach wird > geht er ohne jegliche vorwarnung Liio-Akkus haben den Vorteil daß sie längere Zeit relativ wenig absacken. Nachteil ist natürlich, daß dann die Spannung steil nach unten geht. Modellflieger haben dazu einige wunderbare Berechnungen angestellt (z.B.http://www.mikrokopter.de/ucwiki/FlugZeit). Einfacher wäre bei Dir z.B. die Zahl der Betätigungen zu zählen und bei 140 eine Ladung zu verlangen.
Ja ich hatte mir vorher schon gedacht, dass mit dem akku eine schwere
geburt wird ;) aber die idee mit der betätigungsanzahl ist garnicht mal
verkehrt...
um nochmal auf den shunt zurückzukommen um die überlast zu registrieren:
Gibt es da eine Möglichkeit den wert vom shunt auf einen eingang des
arduino zu legen und mit einer if abfrage im programm zu implementieren
das man beispielsweise sagt
if (pin 6 > (wert))
{
bsp Notaus...
}
(is nur ein beispiel ;) )
oder müsste man das hardware technisch lösen?!
@ Felix Decker > aber bei halber belastung, sprich 300-350kg belastung für den Motor habe > ich an den motorklemmen nen belastungsstrom von ca 22V gemessen Das ist keine Strommessung sondern eine Spannungsmessung. Strommessung: http://www.elektronik-kompendium.de/sites/grd/1505051.htm Spannungsmessung: http://www.elektronik-kompendium.de/sites/grd/1505041.htm
> Gibt es da eine Möglichkeit den wert vom shunt auf einen eingang des > arduino zu legen Der ADC des Arduino verträgt max. Vcc, d.h. die Betriebsspannung des Arduinoboards. Die Strommessung mittels Shunt funktioniert indem man den Spannungsabfall über einem bekannten Widerstand (Shunt) misst und mit der Rudi-Regel den Strom berechnet. Dabei ist zu beachten, dass eine oder gar beide absoluten Spannungen am Shunt weit höher ist als deine Vcc des Arduino! Man braucht also eine externe Schltung zur Anpassung zwischen den Messpunkten am Shunt und dem Arduino. http://www.mikrocontroller.net/articles/AD-Wandler#Gro.C3.9Fe_Spannungen_messen
Also der Motor zieht im moment zwischen 1,8 A & 2,1 A bei der hälfte der Beladung die später realisiert werden soll.
Hallo Felix, schon einmal an einen Zugkraftsensor gedacht? Vielleicht sowas: http://www.atp-messtechnik.de/pg/Zugkraftaufnehmer/386 Bei 700kg dürfte die Sicherheit ein Thema sein und das alleine über den Motorstrom zu überwachen? Gibt es nicht auch die Möglichkeit das der "Lift" oben über-/beladen wird und dann abwärts fährt? Dann greift die Strommessung kaum. Wird der Akku beim Abwärtsfahren geladen oder gibts ein Gegengewicht? :) Grüsse Martin
Also ein gegengewicht im eigentlichen sinne gibt es nicht. Ich habe einen federbezogenen Lastausgleich realisiert der die hälfte des zu stemmenden gewichtes übernimmt!die ca 700kg sind "schon" nur noch die, die auf dem motor selber liegen! genau für den fall (die klassische Überladung) will ich die strommessung haben!da der Motor wenn er mehr als sonst stemmen muss ja auch mehr verbraucht. ein zugsensor wäre auch möglich, allerdings müsste ich erst testen wie dieser sich mit den Federn vereinbaren lässt... mfg felix
Felix Decker schrieb: > ein zugsensor Miniatur-Zugkraftaufnehmer NUR € 575.00 aus Gold? zum Test/Vergleich Drehspul-Meßwerk 15A, B: 60mm, H: 47mm 8,90 €
<---- Push... Hat noch wer ne andere idee bevor ich jetzt alles auseindaer baue!? ;)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.