Grund für die Überlegungen ist der Betrieb eines Laserpointer-Systems zu Kommissionierung von Bauelementen aus einem Regal. Der Pointer sitzt an einem Ausleger von ca. 50 cm an der rechten oberen Ecke eines Regales. Um die einzelnen Positionen der Lagerfächer anzulernen, könnte man natürlich jedes Fach einmal ansteuern und die dazugehörigen Koordinaten speichern. Bei einem Regal von z.B. 12 Ebenen zu je 30 Fächern aber eine ziemlich langwierige Angelegenheit. Einfaches lineares Unterteilen klappt ja wegen der perspektivischen Verzerrung aus dem Blickwinkel des Pointers auch nicht ... Meine Überlegung nun: Man speichert die X- und Y-Koordinaten einer jeden der vier Seiten, also Anfang, Mittelpunkt und Ende. Wegen der erwähnten perspektivischen Verzerrung wird der dem Pointer näher gelegene Teil scheinbar größer sein, die Mitte liegt also z.B. bei (angenommenen) 60% der Koordinatenschritte zwischen Beginn und Ende. Die Idee: Man teilt nun die vordere Hälfte in eben jenem Verhältnis, ebenso die hintere Hälfte und danach deren Teile ebenfalls ... haut das hin? Oder muss ich am Ende doch die Mathebücher wieder 'rausholen?
ist doch einfaches dreieckswinkel berechnen. tan @ = Ankathete durch Gegenkathete alpha = arctan (abstand/x) beta = arctan (abstand/y) 2 dimensionale lookup-tabelle errechnen lassen am PC und schön ist aber wer braucht denn so was ? es gibt doch automatisierte Lagersysteme? ts ts ts ;-) MfG
Danke für die Anregungen, werde das mal durchspielen ...
> es gibt doch automatisierte Lagersysteme?
Ja eben, schon mal was von "pick by ligt" oder "pick by point" gehört?
Braucht man, wenn die Artikel so unterschiedlich (verpackt) sind, dass
es schwierig ist, sie automatisch aus dem Regal zu schubbsen. Ausserdem
ist es kostenmäßig eine Stufe darunter und gleichzeitig sehr viel
flexibler.
Frank Esselbach schrieb: > ist es kostenmäßig eine Stufe darunter und gleichzeitig sehr viel > flexibler. Und durch die Schwenkmechanik anfällig. An jedem Fach eine helle LED ist mechanisch viel einfacher. 2 mal im Jahr den Servicetechniker im Haus, der die Schwenkmechanik warten muss, und du hast die Mehrkosten für die Verkabelung wieder herrinnen. Dafür hast da allerdings dann in dieser Zeit keinen Produktionsausfall, weil die Mechanik wieder mal einen Vormittag lang streikt.
Die Schwenkmechanik besteht aus digitalen kugelgelgerten Servos mit Metallgetiebe, staubgeschützt in einer Acrylkugel - ich denke nicht, dass die so schnell schlapp machen. Bei der LED-Lösung brauchst du wieder 'n Haufen Strippen bzw. ein Bussystem mit Steckern und Adressdecodern. Zum anders-einrichten (Fachgröße) musst du evtl. sogar Hand anlegen - das macht der Pointer alles nur mit Software. Auf der einen Seite hast du ein verteiltes umfangreiches System mit Kabelei aber ohne Mechanik, auf der anderen Seite nur ein einziges Objekt mit Mechanik. Die Zeit wird zeigen, was besser ist ...
Frank Esselbach schrieb: > Um die einzelnen Positionen der Lagerfächer anzulernen, könnte man > natürlich jedes Fach einmal ansteuern und die dazugehörigen Koordinaten > speichern. Bei einem Regal von z.B. 12 Ebenen zu je 30 Fächern aber eine > ziemlich langwierige Angelegenheit. Einfaches lineares Unterteilen > klappt ja wegen der perspektivischen Verzerrung aus dem Blickwinkel des > Pointers auch nicht ... Was für eine Perspektivische Verzerrung? Ich kenne das System nicht bzw. deine Erläuterung ist etwas mau. Oben rechts sitzt ein Laser, und weiter? Wenn du die opt. Verzerrung auf eine Kamera beziehst, die kann man rausrechnen.
Frank Esselbach schrieb: > Die Schwenkmechanik besteht aus digitalen kugelgelgerten Servos mit > Metallgetiebe, staubgeschützt in einer Acrylkugel - ich denke nicht, > dass die so schnell schlapp machen. Das Problem bei Servos sind die Potis für die Positionsrückmeldung.
Peter Pfanne schrieb: > deine Erläuterung ist etwas mau. Oben rechts sitzt ein Laser, und > weiter? Der Laser sitzt auf einer SChwenkmechanik. Die Frage: wie muss die geschwenkt werden, damit der Laser einen bestimmten Punkt trifft. Je nach Mechanik ist das triviale Triogonometrie im rechtwinkeligen Dreieck und Phythagoras.
Pythi hat damit nichts zu tun, da nicht die Strecken sondern die Winkel gefragt sind. Bei konstanter Länge der Ankathete (Abstand vom Regal) ergibt sich der Seitenwinkel aus den arctangens für die x-Achse und der Höhenwinkel aus dem arcustanges für die y-Achse aber das schrob ich weiter oben schon. Ergänzend währe zu erwähnee das eine zentrale Lage des Pointers mit möglichst großem Abstand zum Regal die günstigste Lösung bietet aso am gegenüberliegenden Regal anbringen.
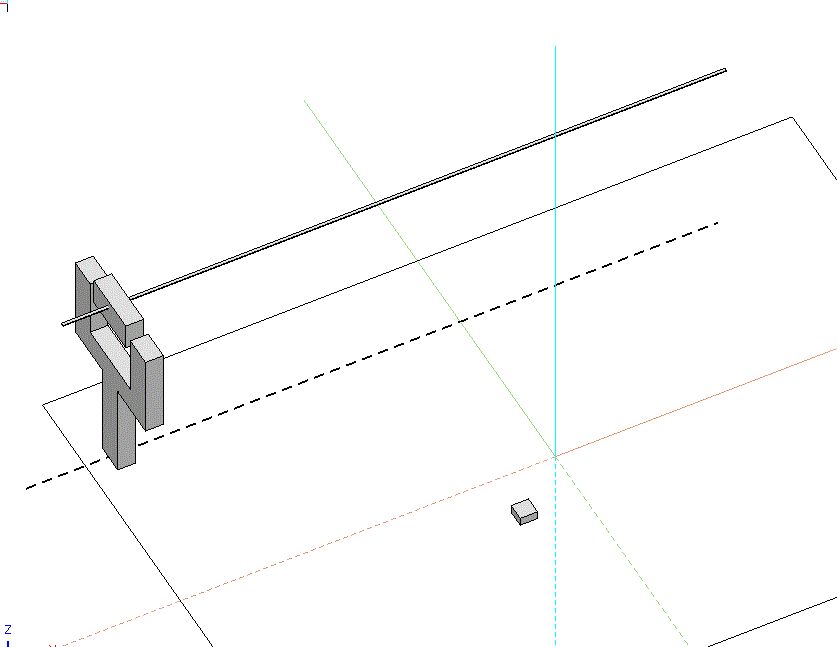
Winfried J. schrieb: > Pythi hat damit nichts zu tun, da nicht die Strecken sondern die Winkel > gefragt sind. Zwischendurch brauchst du ihn mal. Von vorne drauf geschaut ist das ein normales rechtwinkeliges Dreieck. L------------- |\ Alpha | \ | \ | \ | \ X/Y um den Winkel zu berechnen, unter dem der Laser gedreht werden muss, brauchst du keinen Phyty, soweit richtig. Atan2 aus dx und dy und der Winkel ist gerechnet. Damit ist der Strahl so ausgerichtet, dass er in einer Ebene parallel zur Regalebene verläuft und über den Punkt X/Y drüber geht. Sieht man jetzt seitwärts rechtwinkelig auf den Strahl drauf (wichtig: rechtwinkelig zur Strahlebene! nicht in den Hauptachsen), lautet die nächste Frage "Wie muss ich den Strahl jetzt um eine Achse rechtwinkelig zu diesem verdrehten Strahl neigen, damit er in der richtigen Entfernung die Regalebene durchstösst." L\ | -\ | -\ | -\ +--------------> Wieder hat man ein rechtwinkeliges Dreieck, aber diesmal ist eine der Katheten (die in der Regalebene) die Entfernung des Zielpunktes vom Basispunkt des Lasers. Und dazu brauchst du den Phyty So zumindest würd ich das rechnen, wenn die Mechanik so aussieht, dass man im Prinzip eine Gabel hat, die drehbar ist und zwischen den Gabelzinken die 2.te Achse sitzt, die die Verdrehung in der Neigung macht. Deine Berechnung ist insofern fehlerhaft, weil du keine Mechanik bauen kannst, die so funktioniert, wie du das rechnest. Die beiden Verdrehungen sind nicht unabhängig voneinander.
Angehängte Dateien:
-

Laser1.gif
14 KB -

Laser2.gif
8,4 KB -

Laser3.gif
12 KB
{kind=link}
{kind=link}
{kind=link}
Laser1 ... die Ausgangslage
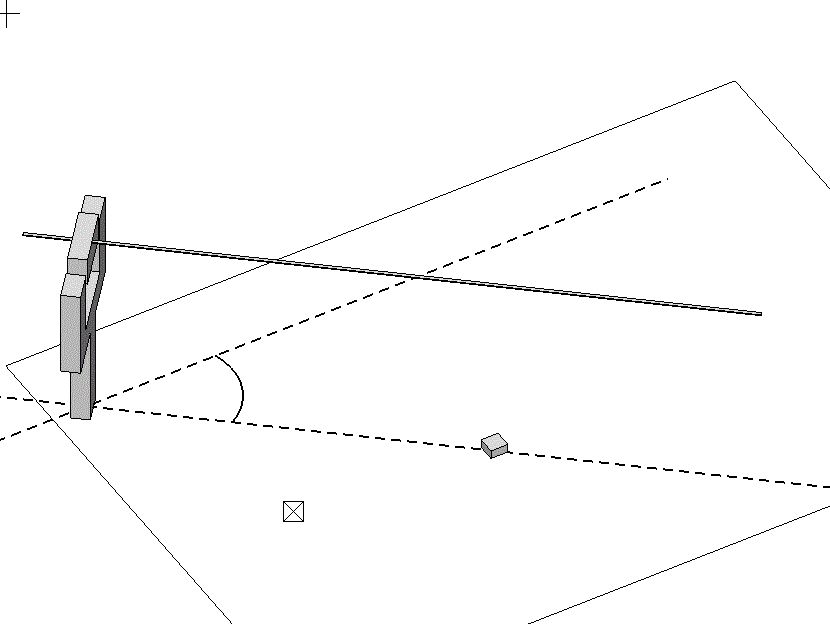
Laser2 ... Die ganze Montierung so gedreht, dass der Strahl über
den Zielpunkt drüber geht
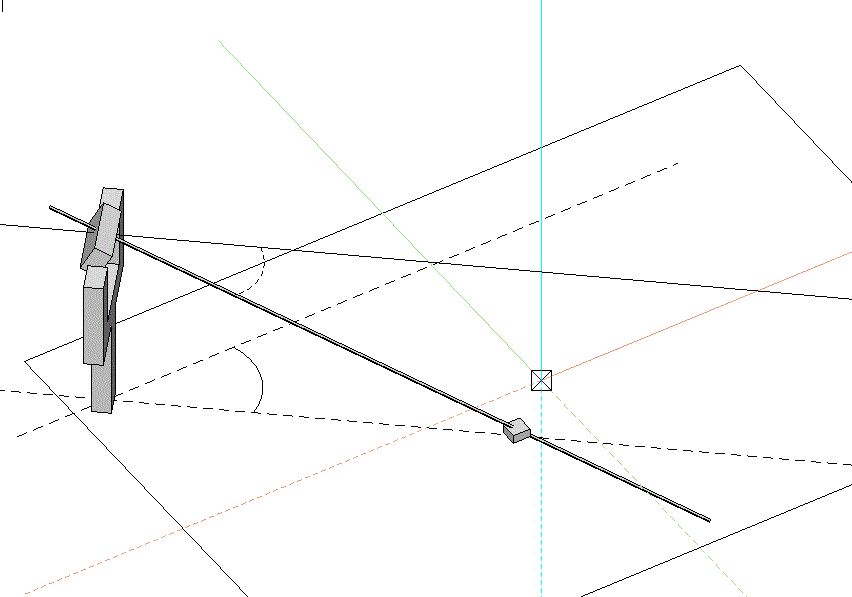
Laser3 ... In dieser verdrehten Lage, den Strahl geneigt, bis er am
Zielpunkt die Ebene durchscheidet
Für den letzten Schritt brauchst du den Phyty um die Distanz vom
Bodenpunkt der Montierung zum Ziel in der Zielebene zu berechnen.
Alles in allem: einfache Trigonometrie, wenn man sich erst mal eine
Skizze gemacht hätte :-)
Was spricht gegen eine Nummerierung der Fächer und ein Display, das die Position anzeigt? Ist wartungsarm und auch besser sichtbar, als ein Laserpunkt, außerdem ausbaubar. Der Pointer funktioniert nur in einer Ebene.
Martin Kreiner schrieb: > Ist das mit Google Sketchup gemacht? Nein. Hausinternes CAD http://elitecad.messerli.at/
Karl Heinz Buchegger schrieb: > Martin Kreiner schrieb: >> Ist das mit Google Sketchup gemacht? > > > Nein. > Hausinternes CAD > http://elitecad.messerli.at/ Daher kommt dein Spezialwissen zu geometrischen Algorithmen, Mechanik etc. zu deinen allgemeinen Software-Engineering Kenntnissen. Interessant
@ K.H. ehm hast mich erwischt bin zu kurz gehüpft. Meine Methode würde bei der 2. Drehung eine vomdrepunkt weg weisend offene Parabel schreiben statt einer geraden Linie. Du hast Recht die Hypothenuse des 1. Dreiecks gibt die neue Ankathete für die 2. Achse. Aber das ist mit Exel o.ä. schnell erschlagen. Etwas für Basicprogrammierer. duck und wech Namaste
Frank Esselbach schrieb: > klappt ja wegen der perspektivischen Verzerrung aus dem Blickwinkel des Ich versteh immer noch nicht was da verzerrt wird. Ein Laser leuchtet gerade aus. Wenn er nun von ein paar Spiegeln abgelenkt wird kommen zwar die diskutierten nichtlinearen winkelberechnungen ins spiel, aber das Grundproblem ist doch ein quasi-linearer Zusammenhang ??
Peter Pfanne schrieb: > Frank Esselbach schrieb: >> klappt ja wegen der perspektivischen Verzerrung aus dem Blickwinkel des > Ich versteh immer noch nicht was da verzerrt wird. Vergiss es. Lies dir sein Eröffnungsposting durch, überleg wie es um seine Kentnisse in Geometrie bestellt ist und denk darüber nach, was das wohl über die korrekte Verwendung von Begriffen aus der Geometrie aussagt. > Einfaches lineares Unterteilen klappt ja wegen der perspektivischen > Verzerrung aus dem Blickwinkel des Pointers auch nicht ... Was er in Wirklichkeit meint ist, dass die Winkelfunktionen keine linearen Funktionen sind. Mit Perspektive oder perspektivischer Verzerrung hat das nichts zu tun. Egal, wir haben auch so verstanden was sein Problem ist und wie man es richtig löst.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.