Hej Leute. ich habe einige kleine Mosfets hier rum liegen und wollte gern eine Schaltung aufbauen mit der ich einen Mosfet über das PWM Signal was aus meinem RC Empfänger kommt an zu steuern. Ziel des ganzen ist es einen kleinen Regler zu bauen mit dem ich einen kleinen Gleichstrommotor (nur eine Richtung drehend) der max 1A zieht, zu realisieren. Soweit ich weiß kommt aus dem Empfänger ein PWM Signal mit 50HZ. Wenn ich das Signal mit dem Oszi messe habe ich eine Spannung zwichen 0 und 0,5V. Doch das reicht nicht um mein Mosfet anzu steuern. Weiß einer Raat? Die Schaltung sollte so wenig wie möglich an Bauteile haben da es für Micro Modelle sein soll. LG Shabi
Bei Standard Empfängern kommt alle ca alle 20ms (also 50Hz) ein Impuls mit einer Impulslänge zwischen 1 und 2ms, je nach gewünschtem Servoausschlag. Die Spannung des Impulses entspricht aber üblicherweise nicht 0,5 Volt, sondern der Versorgungsspannung des Empfängers. Hast du eventuell den Tastkopf falsch eingestellt?. Lies doch einfach die Impulslänge mit einem uC ein und erzeuge dir daraus ein passendes PWM Signal für den Mosfet.
Hallo Danke schonmal für die Antworten. Also einen µc wollte ich nicht verwenden. Wie gesagt das ganze soll so wenig komponenten und einfach wie möglich sein. Es gibt ja auch normale Regler zu kaufen nur die sind mir viel zu groß und zu schwer. Diese Regler haben ja auch keine µc oder? LG Shabi
Einfacher als mit einem kleinen uC geht es aus meiner Sicht nicht. Auch die Regler die es zu kaufen gibt werden wohl alle einen uC eingebaut haben, alleine schon wegen den Sicherheitsfeatures. Bei kleinen BLDC Controllern habe ich schon häufiger atmegas gesehen, für deine Zwecke sollte es aber auch ein kleiner Attiny 13 o.ä. tun. Was soll daran groß oder kompliziert sein?
Hallo Leute. Nach einer kurzen Pause (ca. 9 Monate) habe ich angefangen mich wieder mit diesen Thema zu befassen. Um auf die letzten Antworten zu kommen... Ja habe angefangen mit einem µC zu experementieren. Ich habe lange gesucht und ein paar dinge gefunden die mir weiter geholfen haben. Nun habe ich ein Code in meinem Atmega8 wo ich auf einem Pin ein PWM Signal von einem RC Empfänger drauf gebe und an einem Ausgang habe ich dann einen micro Bürstenmotor dran. Soweit so gut der Code funktioniert auch allerdings natürlich total primitiv wie mansche hier im Forum Kopfschütelnd sagen würden. Mein Vorhaben nach wie vor ich möchte ultra kleine leichte micro modelle wie z.b. microcopter bauen und benötige für die Bürstenmotoren micro Regler die sehr klein und leicht sind. Da ich im Netzt kaum was gefunden habe und wenn dann fast unbezahlbar, hab ich mir gedacht ich baue meinen eigenen Regler. Was ich erreichen möchte ist das wenn der Gasknüppel auf 0 steht der Motor aus ist und bei Vollgas der motor max Drehzahl erreicht. Natürlich soll von 0 bis max alles geregelt sein. Hier nun mein Code. Bitte nicht lachen ich bin froh das ich es überhaupt geschafft habe den Motor zum laufen zu bringen.
1 | #include <avr/io.h> |
2 | #include <avr/interrupt.h> |
3 | #include <util/delay.h> |
4 | |
5 | #define F_CPU 4000000UL
|
6 | |
7 | |
8 | volatile int flanke=0; |
9 | volatile int aktuell_pwm_l=0; |
10 | volatile int aktuell_pwm_h=0; |
11 | |
12 | ISR(TIMER1_CAPT_vect) |
13 | {
|
14 | if (flanke==0) |
15 | {
|
16 | TCNT1H = 0; //Timer auf null zurück |
17 | TCNT1L = 0; |
18 | TCCR1B&= ~(1<<ICES1); //ICP-Pin auf fallende Flanke einstellen |
19 | flanke=1; |
20 | }
|
21 | else
|
22 | {
|
23 | flanke=0; |
24 | TCCR1B|=(1<<ICES1); //ICP auf steigende Flanke wieder aktivieren |
25 | aktuell_pwm_l=ICR1L; //Zählerstand speichern |
26 | aktuell_pwm_h=ICR1H; //zählerstand speichern |
27 | }
|
28 | }
|
29 | |
30 | void init_prozedur(void) |
31 | {
|
32 | TCCR1B |= (1<<ICNC1)|(1<<ICES1)|(1<<CS11) | (1<<CS10); //vorteiler 64, Mittelung ON, steigende flanke |
33 | TIMSK |= (1<<TICIE1);//INTERRUPT ON |
34 | |
35 | sei(); |
36 | }
|
37 | |
38 | int main (void) |
39 | {
|
40 | init_prozedur(); |
41 | DDRC=0xff; |
42 | DDRB=0b11110000; |
43 | while(1) |
44 | {
|
45 | if (aktuell_pwm_l >= 60 && aktuell_pwm_l < 65) |
46 | {
|
47 | PORTC^=(1<<PC1); |
48 | _delay_ms(100); |
49 | }
|
50 | if (aktuell_pwm_l >= 65 && aktuell_pwm_l < 70) |
51 | {
|
52 | PORTC^=(1<<PC1); |
53 | _delay_ms(95); |
54 | }
|
55 | if (aktuell_pwm_l >= 70 && aktuell_pwm_l < 75) |
56 | {
|
57 | PORTC^=(1<<PC1); |
58 | _delay_ms(90); |
59 | }
|
60 | if (aktuell_pwm_l >= 75 && aktuell_pwm_l < 80) |
61 | {
|
62 | PORTC^=(1<<PC1); |
63 | _delay_ms(85); |
64 | }
|
65 | if (aktuell_pwm_l >= 80 && aktuell_pwm_l < 85) |
66 | {
|
67 | PORTC^=(1<<PC1); |
68 | _delay_ms(80); |
69 | }
|
70 | if (aktuell_pwm_l >= 85 && aktuell_pwm_l < 90) |
71 | {
|
72 | PORTC^=(1<<PC1); |
73 | _delay_ms(75); |
74 | }
|
75 | if (aktuell_pwm_l >= 90 && aktuell_pwm_l < 95) |
76 | {
|
77 | PORTC^=(1<<PC1); |
78 | _delay_ms(70); |
79 | }
|
80 | if (aktuell_pwm_l >= 95 && aktuell_pwm_l < 100) |
81 | {
|
82 | PORTC^=(1<<PC1); |
83 | _delay_ms(65); |
84 | }
|
85 | if (aktuell_pwm_l >= 100 && aktuell_pwm_l < 105) |
86 | {
|
87 | PORTC^=(1<<PC1); |
88 | _delay_ms(60); |
89 | }
|
90 | if (aktuell_pwm_l >= 105 && aktuell_pwm_l < 110) |
91 | {
|
92 | PORTC^=(1<<PC1); |
93 | _delay_ms(55); |
94 | }
|
95 | if (aktuell_pwm_l >= 110 && aktuell_pwm_l < 115) |
96 | {
|
97 | PORTC^=(1<<PC1); |
98 | _delay_ms(50); |
99 | }
|
100 | if (aktuell_pwm_l >= 115 && aktuell_pwm_l < 120) |
101 | {
|
102 | PORTC^=(1<<PC1); |
103 | _delay_ms(45); |
104 | }
|
105 | if (aktuell_pwm_l >= 120 && aktuell_pwm_l < 125) |
106 | {
|
107 | PORTC^=(1<<PC1); |
108 | _delay_ms(40); |
109 | }
|
110 | if (aktuell_pwm_l >= 125 && aktuell_pwm_l < 130) |
111 | {
|
112 | PORTC^=(1<<PC1); |
113 | _delay_ms(35); |
114 | }
|
115 | if (aktuell_pwm_l >= 130 && aktuell_pwm_l < 135) |
116 | {
|
117 | PORTC^=(1<<PC1); |
118 | _delay_ms(30); |
119 | }
|
120 | if (aktuell_pwm_l >= 135 && aktuell_pwm_l < 140) |
121 | {
|
122 | PORTC^=(1<<PC1); |
123 | _delay_ms(25); |
124 | }
|
125 | if (aktuell_pwm_l >= 140 && aktuell_pwm_l < 145) |
126 | {
|
127 | PORTC^=(1<<PC1); |
128 | _delay_ms(20); |
129 | }
|
130 | if (aktuell_pwm_l >= 145 && aktuell_pwm_l < 150) |
131 | {
|
132 | PORTC^=(1<<PC1); |
133 | _delay_ms(15); |
134 | }
|
135 | if (aktuell_pwm_l >= 150 && aktuell_pwm_l < 155) |
136 | {
|
137 | PORTC^=(1<<PC1); |
138 | _delay_ms(10); |
139 | }
|
140 | }
|
141 | }
|
Über Verbesserungen und Vorschläge würde ich mich sehr freuen. LG Shabi
krass - das soo zu machen, wenns denn Funktioniert... Gut gemacht. Ich habe noch fertige unbestückte Platinchen für sowas. Für zwei Bier schicke ich dir eine. Bestücken musste dann selbst. Axelr.
Hej Ja der Code funtioniert aber natürlich noch lange nicht wie es soll ich bekomme die Drehzal zwar geregelt aber alles hakt etwas und läuft unrund... Die Platinen schauen cool aus was kommen denn für Komponenten drauf und wie sieht es denn mit dem Code aus? Beim Googlen bin ich z.b. hier drauf gestoßen: http://www.flytron.com/micro-rc-electronics/51-micro-4ah-esc.html So was in der richtung möchte ich bauen allerdings einen Controller der dann 4 Mosfets/Motoren betreibt. LG Shabi
Ich habe hier einen mega8 drauf und zwei doppelfets. Leider fehlen Phillip Widerstände sodass beim flashen der Motor ab sein muss. Code ist in Basic geschrieben. Habe ich aber nicht mehr. Schaltung muss ich raus suchen. War aber nichts weiter. Die nkanal gingen auf je einen Timer und di pkanal auf zwei portpins. Die großen Pass sind für den 7.3728 MHz Resonanz. kann man an der stellen gern absägen und den internen verwenden. Sorry wegen Text -> IPhone
Hej hört sich super an aber dann hätte ich wieder das Problem das ich keinen Code habe. Die Hardware ist in moment das kleinere Über. Aber danke vielmals für das Angebot. Um auf mein Code zurück zu kommen, es gibt sicherlich elegantere Methoden den Ausgang anzusteuern nur ist die Frage wie muss das ausschauen? Ich hab ne ewigkeit gesucht und suche immer noch finde aber nichts was man verwerten könnte. Über ein paar Tipps würde ich mich sehr freuen. LG Shabi
Ich kenne deine Anforderungen bezüglich der Motoren nicht. Aber diese Regler kennst du, oder? http://www.hobbyking.com/hobbyking/store/__9667__HobbyKing_XP_3A_1S_0_7g_Brushless_Speed_Controller_.html http://www.hobbyking.com/hobbyking/store/__7184__TGY_DP_3A_1S_1g_Brushless_Speed_Controller.html Viel kleiner und leichter gehts kaum, denke ich. Ich habe den 3A Regler an einem Mini-BL in der Micro Trojan geflogen. Der Regler lief einwandfrei. Leider brachte der Motor nicht die gewünschte Steigleistung, so dass ich wieder auf das Originalsetup umgebaut habe. Frank
Hallo Frank, ja diese Regler kenn ich hab ich auch schon in verbindung mit den 2g Brushless Motoren benutzt. Wie du schon sagts die Regler sind top nur die motoren bringen in der Regel kaum leistung. Aber ich will ja Bürstenmotoren ansteuern... Meine Motoren sind sehr klein und leicht und es werden maximale Ströme von wenn überhaupt 1A fließen. Danke dennoch für dein Mühe. LG Shabi
Auch das geht noch viel kleiner ;) Aber Brushless war hier nicht gefragt, von daher habe ich die Platinen jetzt nicht fotografiert.
Hallo Shabi, Timer 1 und Timer 2 des Mega8 haben doch ne Hardware PWM. Schau am besten im Datenblatt nach dem Fast PWM Mode. Gruß Michael
Hallo also da blicke ich nicht durch. Das Prinziep ist doch das ich ein pwm Signal mit 50Hz rein gebe und ein ein PWM mit höherer Frequenz herausgebe. Und das Signal am Ausgang lege ich dann auf ein Mosfet der den Motor betreibt. Ist das Richtig? Ich habe jetzt mein Code etwas verändert. Statt _delay_ms habe ich jetzt _delay_µs eingebaut und schon läuft der motor viel ruhiger. Dennoch denke ich das es viel besser gehen muss. Statt der delays muss ich doch irgend etwas anderes einstezen können. Das mit dem Fast PWM hab ich nicht so richtig kapiert... LG Shabi
Shabi N. schrieb: > Hallo also da blicke ich nicht durch. Das Prinziep ist doch das ich ein > pwm Signal mit 50Hz rein gebe und ein ein PWM mit höherer Frequenz > herausgebe. Außerdem hat das Eingangssignal ein Tastverhältnis von ca. 5...10% (1...2ms Pulsweite) und das Ausgangssignal von 0...100% > Und das Signal am Ausgang lege ich dann auf ein Mosfet der den Motor > betreibt. Ist das Richtig? Das stimmt soweit. Bei größeren Mosfets, oder wenn die Flanken nicht so steil oder steiler sein sollen kann es sein dass man noch ne zusätzliche Verschaltung brauch. Aber bei deinem Fall gehts glaub erstmal auch ohne. > Ich habe jetzt mein Code etwas verändert. Statt _delay_ms habe ich jetzt > _delay_µs eingebaut und schon läuft der motor viel ruhiger. Üblich sind Taktfrequenzen von z.B. mehreren KHz das würde mit den Delays von einigen µs zusammen passen. So ganz genau hab ich mir deinen Code aber noch nicht angeschaut. > Dennoch denke ich das es viel besser gehen muss. Statt der delays muss > ich doch irgend etwas anderes einstezen können. > > Das mit dem Fast PWM hab ich nicht so richtig kapiert... Das Fast PWM ist Hardware-PWM. Hat zu heißen, dass du einmal alles einstellst und die PWM dann dauerhaft läuft. Der Controller kann nebenbei was anderes machen. Wenn sich bei deinem Eingangssignal die Pulsweite ändert kannst einfach einen neuen (angepassten) Wert ins Compareregister des Timers schreiben und die Hardware des Controllers macht den Rest. Gruß Michael
Michael L. schrieb: >> Und das Signal am Ausgang lege ich dann auf ein Mosfet der den Motor >> betreibt. Ist das Richtig? > Das stimmt soweit. Bei größeren Mosfets, oder wenn die Flanken nicht so > steil oder steiler sein sollen kann es sein dass man noch ne zusätzliche > Verschaltung brauch. Aber bei deinem Fall gehts glaub erstmal auch ohne. Achja, das Bezog sich nur auf die Beschaltung vom Gate. Die Freilaufdiode darfst nicht vergessen. Ein Motor ist ja ne induktive Last.
http://www.rn-wissen.de/index.php/RC-Empf%C3%A4nger_auswerten Beitrag "PPM von RC-Empfänger einlesen in Mega8" Beitrag "RC-Empfänger an Mikrocontroler v2" Beitrag "Re: 4 RC-Empfängersignale mit µC messen" Bisschen was zu lesen
Beitrag "Servo Summensignal auswerten" http://www.ulrichradig.de/home/index.php/avr/avr_-_rc http://www.ulrichradig.de/home/uploads/File/RC/RC_Sum_Encode.zip
Super geil werde mich mal da durch arbeiten. Danke schonmal. LG Shabi
Hi Shabi, habe das neulich auch schnell mal mit Arduino zusammenkopiert. Mein Sketch hab ich dir mal angehängt. Steuer damit einen 550 Motor in einem Boot (hatte grad kein Regler da). Ich lasse das auf einem Mega88 laufen, der dann den N-Fet ansteuert. Das wars. Von daher müsste der Code auch auf den PCBs vom Axel R. laufen. Grüße
Hej Kille, Danke für den Code. Aber leider blicke ich da nicht durch. Ich wüsste jetzt auch nicht wie ich den auf mein Atmega8 anpassen könnte. Brauche ich da nicht noch Bibliotheken wie z.b. hier für:
1 | #include <Timer1.h> |
2 | #include <ServoIn.h> |
Blicke den Code irgendwie nicht durch. LG Shabi
Ach ja klar. Das sind die Bibliotheken von dem ArduinoRCLib. Findest du unter: http://sourceforge.net/projects/arduinorclib/ Die kannst du dann der Arduino Umgebung hinzu fügen. Für den Atmega8 wird das leider nicht so einfach. Der kann kein pin change interrupt. Hier würde ich auf den Pinkompatiblen Atmega88 oder besser 168 ausweichen. Dann musst du eigentlich nur noch das passende Arduino Board (mit einem Atmega168) auswählen und schon kannst du die HEX flashen. Wo sich die befindet verrät dir: http://arduino.cc/en/Hacking/BuildProcess Leider ist der Code nicht ganz simpel. Du kannst dir auch noch die Beispiele ansehen. Grüße
Hier sollte man dann aber doch mal die Verhältnismäßigkeit wahren. Wenn unser Shabi einen Code vorstellt, der sagen wir ungewöhnliche. "Programmierstil" Blicken lässt, brauchst Du nicht mit einr komplett Anderen Umgebung ankommen. Besser waere hier ein Avrgcc Beispiel gewesen.
Hehe ja ich weiß meine Codes sind sehr barbarisch. Bin ja noch am lernen. Ich denke erst sollte das ganze funtionieren und dann mach ich mich an die Feinarbeit. Ich wäre schon sehr glücklich wenn es irgendwie ordentlich funktioniert und ich den Code verstehe. Das ist das wichtigste für mich. LG Shabi
So hab noch was im Netz gefunden. Der Code erzeugt Fast PWM am PB1.
1 | #include <avr/io.h> |
2 | #include <avr/interrupt.h> |
3 | |
4 | int main(void) |
5 | {
|
6 | |
7 | DDRB = 0x02; // Setup PB1 as output |
8 | DDRC = 0x03; // Setup PC0 and PC1 as output |
9 | |
10 | ICR1 = 1000; // Set TOP to 10000 |
11 | OCR1A = 500; // Set Dutycycle to 10% |
12 | |
13 | |
14 | |
15 | TCCR1A = (1<<WGM11)|(1<<COM1A1); // Set Timer1 in Phase Correct Mode |
16 | // with ICR1 as TOP value. Set OC1A
|
17 | TCCR1B = (1<<WGM13)|(1<<CS10); // on compare match and clear OC1A |
18 | // on BOTTOM. Clock Prescaler is 1024
|
19 | |
20 | |
21 | TIMSK |= (1<<TOIE1) | (1<<OCIE1A); // Enable Timer 1 Overflow |
22 | // and Compare interrupt
|
23 | sei(); // Set the I-bit in SREG |
24 | |
25 | for(;;); // Endless loop |
26 | // main() will never be left
|
27 | |
28 | return 0; // This line will never be executed |
29 | }
|
30 | |
31 | // Interrupt subroutine timer 1 overflow
|
32 | ISR(TIMER1_OVF_vect) |
33 | {
|
34 | PORTC ^= 0x01; // Toggle Pc0 |
35 | PORTC ^= 0x01; // Toggle PC0 |
36 | }
|
37 | |
38 | // Interrupt subroutine timer 1 compare A match
|
39 | ISR(TIMER1_COMPA_vect) |
40 | {
|
41 | PORTC ^= 0x02; // Toggle PC1 |
42 | PORTC ^= 0x02; // Toggle PC1 |
43 | }
|
Wenn ich diesen Wert "OCR1A = 500;" verändere, ändert sich die Drehzahl an meinem Motor. Der Motor läuft sehr ruhig und sauber. Bei 100 läuft der motor schneller und bei 500 langsamer... Jetzt ist die Frage wie bekomme ich diesen Code in meinem Code eingebaut so das ich mit meinem PWM vom RC Empfänger diesen Wert "OCR1A = 500;" veränderen kann. Hat da einer ne idee? LG Shabi
Shabi N. schrieb: > So hab noch was im Netz gefunden. Der Code erzeugt Fast PWM am PB1. Nein, da ist Phase Correct PWM eingestellt. Funktioniert auch, aber Fast PWM wär etwas leichter verständlich. Auf Seite 97/98 im Datenblatt ist ne Tabelle für die Einstellungen der WGM1-Bits. Achja, nimm vll besser Timer2 für die PWM. Timer1 brauchst ja schon für Input capture. Mit Input Capture hab ich zwar noch nichts gemacht und kann nicht sicher sagen ob das zusammen funktionieren würde, aber mit zwei getrennten Timern wirds höchst wahrscheinlich einfacher. Mein Vorschlag wäre erst eine Funktion für die PWM zu schreiben, die du komplett verstehst und danach diese Funktion in dein Programm einzubauen. Also z.B. sowas:
1 | void pwm_handler(uint8_t value) |
2 | {
|
3 | ...
|
4 | }
|
Für was sind die beiden Interrupts? Was für Hardware verwendest du bisher? Programmer? Steckbrett? Eigene Schaltung? Gruß Michael
In deiner Variable aktuell_pwm_h speicherst du die Länge des high
RC-Signals.
Grob gesagt, wenn das Signal 1 ms lang ist, muss dein OCR1A 1000 sein.
Bei 2ms muss dein OCR1A 0 sein.
D.h du musst nur deine Variable aktuell_pwm_h umrechnen auf den neuen
Bereich. Ich habs mit Arduino so gemacht:
map(g_values[0],UNTERGRENZE,MAXIMAL,0,255);
Die Passende Funkton dazu lautet:
long map(long x, long in_min, long in_max, long out_min, long out_max)
{
return (x - in_min) * (out_max - out_min) / (in_max - in_min) +
out_min;
}
Ich weis jetzt nicht welche Werte deine Variable aktuell_pwm_h annehmen
kann... Wenn es z.B. 60-120 ist währe die Umrechnung (ungetestet) z.B.
so:
OCR1A = 1000-(aktuell_pwm_h)*(1000)/(120-60);
Grüße
So, ich habe nochmal gegen gelesen. Shahib sagt uns mal genau, wo sein Fet drann hängt, wie der Aufbau aussieht, welchen Controller er berwendet. Wenn genug Licht vorhanden ist, kann er gern mal ein Foto machen. Aber ein scharfes! ;) Diese Info sind wichtig. Dann braucht man evtl. nicht im OC Interrupt mit den Pins wackeln. Das macht der Controller dann von selbst. Dazu muss der Motor dann aber auch an den speziellen Pins drann sein, klar. ( schreibt sich schon besser, als auf dem Eierphone... ) Axelr.
naja ein OPV tut es ja auch. Analoge Steller waren relativ einfach aufgebaut. Ein Eingang auf einen Sägezahn, der Andere an den Empfänger und den Ausgang auf den MSOFET. Feddich is.
Angehängte Dateien:
-

SBrett.JPG
740 KB
Also in momment teste ich alles mit nem Mega8 aufm Steckbrett. Der µc wird extern über einen 4MHz Quarz getaktet. Ich habe einen kleinen Bürstenmotor der von einem Transistor BC328 angesteuert wird. An der Basis des Transistors habe ich direkt das PWM Signal drauf. Das heißt wenn ich den Code mit dem Phase Correct PWM auf dem µC spiele, habe ich am PB1 das PWM Signal liegen was direkt auf die Basis des Transistors geht. Der Motor läuft viel besser und sauberer wie mit meinem Code. Hier noch ein Bild vom Aufbau. Befürchte aber das da keiner durchblicken wird da alles etwas kaotisch ist und ich auch noch andere Schaltungen aufm Brett habe. hehe LG Shabi
Angehängte Dateien:
-

image.jpg
140 KB
Stimmt sieht keiner durch. Der Motor am Kollektor oder am emitter? Sieht mir nach Kollektor gegen Minus aus, emitter gegen Plus. Für den pnp schon richtig, fehlt nur der Basisvoewiderstand und die Freilaufdiode. Der rechte Kasten ist dein Servotester? Kannst ruhig dazuschreiben. Ist nicht schlimm;) Edit was ist Denn mit dem Seitenverhältnis von deinem Bild passiert? Sieht ja komisch aus. :)
Der Motor ist am Kollektor und Emmiter ist am Pluspol. Ist ja ein PNP... Da es einfach nur schnell zum testen aufgebaut ist, habe ich keinerlei Vorwiederstände am Transistor oder Freilaufdiode am Motor... Hab einfach in die Kiste gegriffen, AAAH BC328 PNP genau das was ich suche. Und ja das ist ein Servotester sonst müsste ich immer die Gute Anlage auspacken. Bildvehäldnisse sind so weil ich das Bild etwas bearbeitet habe damit es nicht zu groß für den Upload wird. LG Shabi
Stephan schrieb: > naja ein OPV tut es ja auch. > Analoge Steller waren relativ einfach aufgebaut. > Ein Eingang auf einen Sägezahn, der Andere an den Empfänger und den > Ausgang auf den MSOFET. Feddich is. Wie soll das funktionieren? Das Signal vom Empfänger ist entweder High oder Low, der Sägezahn (fast immer) irgendwo dazwischen. Am Ausgang kriegst also genau das gleiche Signal wie am Empfänger hast. Höchstens noch Invertiert.
Angehängte Dateien:
-

Analogsteller.jpg
110 KB
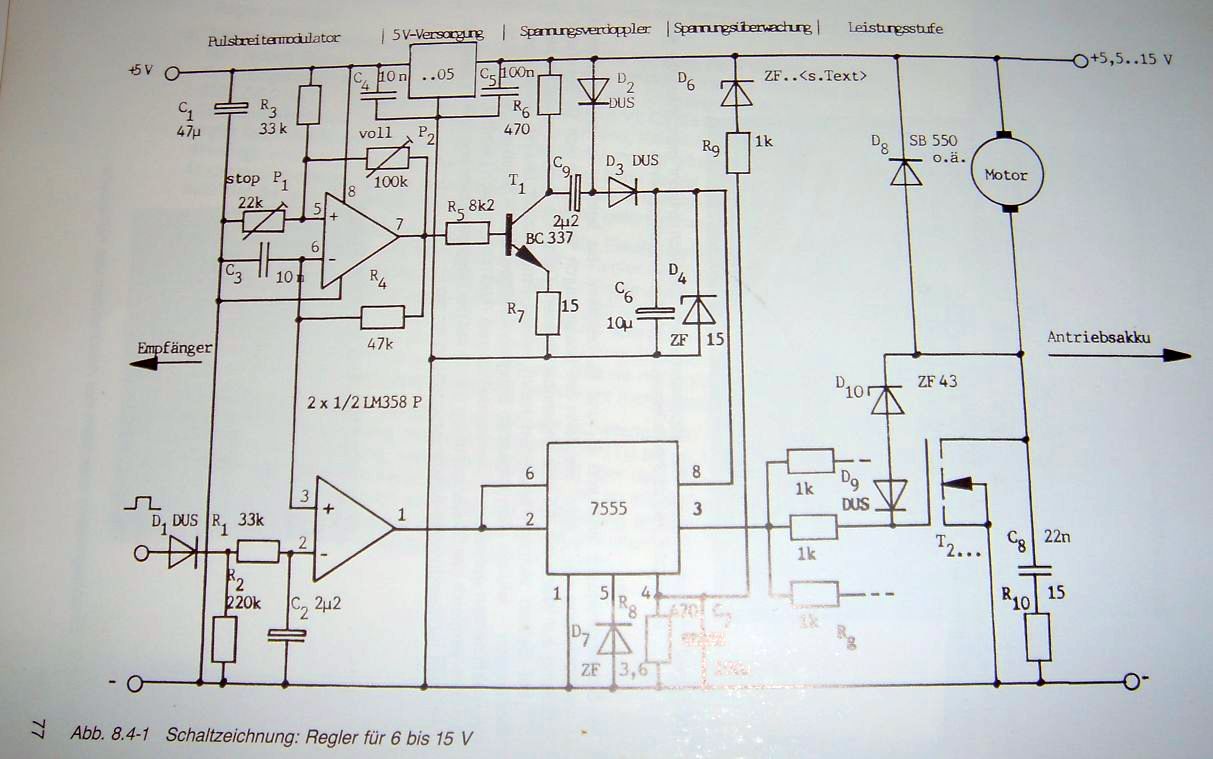
so zB. Ist etwas mehr Bauteifaufwand aber 100 Mal schneller aufgebaut als selber programmiert. Quelle: "Drehzahlregler" von Dipl. Ing. L.Retzbach Bei Einsatz eines LL FET können einige Sachen noch entfallen
Hallo Stephan. Schöne Schaltung und vielendank für deine Mühe. Aber wie oben schon mehrfach beschrieben. Ich möchte micro ultra leicht Modelle realisieren und das lässt sich nunmal nur mit µC realisieren. Ein Controller mit 4 Fets und etwas SMD wiegt gerade mal 1 bis 2 gram. Bei diesen Modellen ist 1g zu viel schon fatal... Dennoch möchte ich mich bedanken. Genial wäre es wenn man aus den beiden Codes irgendwie ein paket machen könnte... LG Shabi
@Stephan So glaub ich schon eher dass das funktioniert. Ist aber deutlich mehr als nur ein OPAMP. @Shabi Apropos klein und leicht: Wiso nimmst du einen ATmega8 mit Quarz? Wäre für dich ein kleiner ATtiny der mit internem Takt läuft nicht besser geeignet?
Angehängte Dateien:
-

steller.jpg
79 KB

Shabi N. schrieb: > Hallo Stephan. Schöne Schaltung und vielendank für deine Mühe. > Aber wie oben schon mehrfach beschrieben. Ich möchte micro ultra leicht > Modelle realisieren und das lässt sich nunmal nur mit µC realisieren. > Ein Controller mit 4 Fets und etwas SMD wiegt gerade mal 1 bis 2 gram. > > Bei diesen Modellen ist 1g zu viel schon fatal... > > Dennoch möchte ich mich bedanken. > > > Genial wäre es wenn man aus den beiden Codes irgendwie ein paket machen > könnte... > > > > > LG > Shabi ich könnte dir ja jezt einen Regler( Steller) zeigen den ich benutze.... Das Relais brauchst Du nicht, ist für die Umpolung. Ist ein PIC 12Fxx ein MOSFET und ein Spannugsregelr wegen BEC. Alles Selbstlernend. Nur von NIX kommt auch NIX.
Michael L. schrieb: > @Stephan > So glaub ich schon eher dass das funktioniert. Ist aber deutlich mehr > als nur ein OPAMP. > > @Shabi > Apropos klein und leicht: Wiso nimmst du einen ATmega8 mit Quarz? Wäre > für dich ein kleiner ATtiny der mit internem Takt läuft nicht besser > geeignet? So........ viel mehr ist es auch nicht. Ist halt ein Doppel OPV. Unterspannung oder Verlust des Signals sind natürlich nicht inbegriffen.
Hallo der Mega8 ist nur zum testen. Später will ich dann Tinys für einzelne Regler nehmen oder z.b. Mega168 für mehere Motoren gleichzeitig. LG Shabi
Bei mehr Motoren wirst du nicht drum rum kommen einen mit Pinchange interrupt zu nnehmen!
Stephan Henning schrieb: > so zB. > Ist etwas mehr Bauteifaufwand aber 100 Mal schneller aufgebaut als > selber programmiert. > > Quelle: "Drehzahlregler" von Dipl. Ing. L.Retzbach > > Bei Einsatz eines LL FET können einige Sachen noch entfallen In kleinster weise zeitgemäß. Sowas von Achtziger.
Shabi N. schrieb: > Hallo der Mega8 ist nur zum testen. Später will ich dann Tinys für > einzelne Regler nehmen oder z.b. Mega168 für mehere Motoren > gleichzeitig. Wenn mehrere Motoren ansteuern willst würd ich das Empfängersignal auch mit Pinchange Interrupts einlesen. Auch bei zwei Motoren reicht dir dann noch ein 6 oder 8 Pinner. Bei 6 Pins brauchst dann halt HVSP. Hast du noch andere Controller vorrätig? Der ATmega8 hat ja keine Pinchange Interrupts
Hi das hört sich doch super an. Pinchange hab ich noch nie gehört muss ich mir mal anschauen. Was macht es denn genau ?? Ich hab noch ein paar attiny 85 da will aber heute noch bestellen. Was würdet ihr mir raten. Mega48, 88, 168... Ich bestell gleich die smd varianten mit. Hab mal vor lager zeit hier im forum mal ein Angebot von fertigen Modulen gesehen wo die Controller inkl quarz und etwas smd fertig verlötet waren... Lg Shabi
passt doch: ein Eingang, vier Ausgänge, Plus, Mius, Reset. Ich würde den Tiny85 nehmen. Ich würde die QFN Variante nehmen und bei Vishay klitzekleine N-Mosfets kommen lassen. (Si8812DB) Die müsste ich dan aber auch im Labor zusammenlöten... :(
Ah ok ich hab vergessen zu erwähnen es kommen 4 unterschiedliche pwms rein und sollen dann vier unterschiedliche Motoren ansteuern. Das heißt im Prinzip 4 Separate Regler in einem Controller. Z.b. pwm1 hat zur gleichen Zeit einen anderen wert wie Pwm2, pwm3, pwm4... Diese funktion benötige ich z.b. bei Microcopter mit vier Motoren wo jeder Motor für sich angesteuert wird. Welcher Controller kann denn sowas. Der müsste doch wenn ich es richtig verstanden habe 8 timer haben. 4 für das eingangs pwm und 4 für das ausgangs pwm. Im Multicopter Bereich wird sehr häufig der Mega168 verwendet. Hab auch ein Controller Board mit nem Mega48. Lg Shabi
http://de.farnell.com/international-rectifier/irlhs6276trpbf/dual-n-ch-mosfet-20v-4-5a-pqfn/dp/1866998 http://de.farnell.com/atmel/attiny85-20mu/mcu-8bit-avr-8k-flash-20qfn/dp/1972175 http://de.farnell.com/avx/0603zd106mat2a/kondensator-x5r-0603-10v-10uf/dp/1867954 http://de.farnell.com/te-connectivity/crg0201f147r/widerstand-0201-1-147r-dickfilm/dp/2116155 http://de.farnell.com/vishay-draloric/crcw020147k0fned/widerstand-0201-47k0-1/dp/2140277 http://de.farnell.com/jst-japan-solderless-terminals/sm08b-surs-tf-lf-sn/stecker-08mm-smt-8kont/dp/9491970 http://de.farnell.com/jst-japan-solderless-terminals/08sur-08sur-32w150/kabel-0-8mm-150mm-8-pol/dp/3849673 Mosfet Atmel Block-kondensator Gate-Widerstand Pullup-Widerstand Steckverbinder(chen) zum Programmieren Anschlusskabel quasi für die andere Seite was fehlt noch? Der Code... sicher
Die PWM's haben zwar alle unterschiedliche Werte, kommen aber NACHEINANDER bei Dir eingeflogen. Somit können die ruhig auf einen PIN gelegt werden. nach der vierten PWM ist erst mal "ewig" Ruhe, bevor die erste wieder "vorbeischaut". In der Zeit kannst Du dann gemütlich alles abarbeiten.
Hej alex danke für die Liste. Das wäre dann ein Summensignal wo alle pwms zusammen über eine Leitung kommen. Es gibt Empfänger die ein Summensignal erzeugen können aber nicht alle. Hiebei werden tatsächlich 4 Pwms hintereinander rausgespuckt. Aber wenn ich einen normalen Empfänger habe wo z.b. 4 Ausgänge, dann hab ich kein Summensignal mehr sonder 4 separate Signale. Diese Signale kann ich doch nicht einfach parallel schalten ? Geil wäre es auf jedenfall. Lg Shabi Ps:sorry für Schreibfehler aufm tab lässt sich nicht so toll schreiben.
Bin wieder am PC :) Vielleicht baust Du ja erstmal in groß und testest alles schön aus. und mit wachsender Erfahrung schrumpft dann die Baugröße. Du kannst Dir natürlich das Summensignal a) abgreifen oder b) "zurücksummieren" einfach parallelschalten der Ausgänge wird nicht gehen, wegen der dann auszufechtenen Kämpfe der Ausgänge untereinander. vier Dioden und ein Masseableitwiderstand (Pulldown) sollten den Job aber erledigen...
Ich weiss, Du hast sicher auch noch anderes um die Ohren, aber ich hatte den Link geteilt: http://www.mikrocontroller.net/topic/goto_post/1938549 da geht das auch..
Ja natürlich. Ich baue ja erstmal alles aufm steckbrett mit grossen
Komponenten auf und wenn alle läuft, gibts smd...
Deswegen wollte ich ja die Teile dann auch in smd mit bestellen.
Hhm wenn alle Signale parallel liegen mit dioden und Widerstände, woher
weiss ich dann welches Signal wann ankommt?
Bei den Empfänger mit summensignal ist das vor konfiguriert.
Und die gegenseite muss auch genau wissen wann welches Signal ankommt
damit z.b. Querruder und Seitenruder nicht verwechselt werden.
Also nicht böse sein aber ich will definitiv normale Empfänger ohne
Summensignal nehmen...
Ich hätte da eine idee. Ist es nicht möglich z.b. 4 pins als eingang zu
definieren, die 4 Signale drauflegen und im code die Eingänge nach
einander auszulesen? Ich hab mal was von multiplexer gelesen..
Z.b. Eg1 wird ausgelesen und gleich auf AG1 geben.
Dann
Eg2 wird ....... Ag2 geben.
.... dann wieder von vorn...
So könnte man Eg1 und Ag1 als din kanal sehen...
Und ich würde theoretisch mit 2 Timer auskommen.
:-) ist nur ne idee.Wie gesagt bin noch am lernen.
Lg
Shabi
>Bei den Empfänger mit summensignal ist das vor konfiguriert.
Was? Was soll da vorkonfiguriert sein?
Alle 20millisekunden werden (hier in dem Fall) VIER Pakete gesendet,
die, aufeinander folgend 4x2.2millisekunden lang sein können (4x
Vollgas). Du hast also wurstkäs' nach achteinhalb millisekunden ein Loch
von ca. 12 millisekunden, bevor der Spaß von vorn los geht. Finde nun
den ersten Kanal. Du programmierst Dir einfach ein Timeout von 10ms,
welches parallel mitläuft. Wenn das um ist, dann ist der nächste Impuls
dein Kanal Nummer Eins. Du kannst - selbstverständlich - auch die Kanäle
mit vier einzelnen Servokabeln und vier Servosteckern auf vier Eingänge
legen. Kannst Du ja machen: ich dachte, Du wolltest Gewicht sparen ;) An
das Summensignal kommt man sicher im Empfänger drann. Was hast Du für
einen Empfänger?
edit:
"paket" ist hier übetrieben, H-Pegel eben
Also meine Empfänger sind z.b. 2g Empfänger von spektrum oder orange. Die haben jeweils 4 Kanäle. :-) ich benutze natürlich keine Stecker und normale kabel... Alles wird aufgelötet. Ich löte sogar die Stiftleiste vom Empfänger aus um Gewicht zu sparen... Ich achte da ja schon drauf. Zuvor hab ich immer die Elektronik von Micro servos genommen aber die sind nicht so toll... An den normalen Empfänger gibt es soweit ich weiß kein summensignal. Wenn ich z.b. einen Empfänger mit Summensignal haben möchte, muss ich extra einen kaufen. Ich hätte jetzt auch keinen hier um es zu testen. Lg Shabi
Hast Du einen DX8 oder einen DSM2 AR6300? Lass Dir doch nicht alles aus der Nase ziehen... Man kann, wenn man genau solch ein Teil mal in der Hand hält, mal sehen wo man das Summensignal abgreifen kann.
Also Dx8 mit dsmx und dsm2. Ist schon die aktuellere Version. Die Sache ist ja auch dies. Wenn ich einen microcopter baue, habe ich einen flightcontroller der quasie die lage des copters regelt in dem er die motoren einzel ansteuert. Das würde dann heissen ich habe 4 motorregler und 4 Ausgänge beim Fcontroller die separat angeschlossen werden. Das ist der hauptgrund warum ich unbedingt die Signale einzel auslesen muss. Als Beispiel: ich hab nen kleine FController der etwa 8g wiegt. Wenn ich die ganzen teile wie stiftleisten, schalter... die nicht benötigt werden auslöte, bin ich bei ca. 4g bis 5g. Mein Empfänger ohne stiftleisten könnte ich eventuell auf ca 1g bringen. Jetzt brauche ich nur noch nen Motorregler mit 4 EG und 4 AG um den an die 4 AG des FControllers anzuschließen. Ich hab schon einige Copter wie tricopter, quadrocopter, Hexacopter... Mit diversen FController Boards gebaut. Von KK, blackBoard, Free flight Board...Bis hin zu Multiwii Boards gebaut und bei keinen habe ich je am Ausgang ein Summensignal gesehen. Würde auch schlecht gehen weil an jedem Ausgang ein Motorregler dran kommt. Das zu meinem Vorhaben. Deswegen kann ich schon mal nichts mit Summensignal anfangen. Lg Shabi
Shabi N. schrieb: > Ah ok ich hab vergessen zu erwähnen es kommen 4 unterschiedliche pwms > rein und sollen dann vier unterschiedliche Motoren ansteuern. Das heißt > im Prinzip 4 Separate Regler in einem Controller. Bei 4 Motoren müsste der ATtiny24/44/84 passen. Der hat 4 PWM Ausgänge und mehr als genug Pins für Pinchange Interrupts. Um das Servosignal einzulesen musst bei jedem Pinchange schauen welcher Eingang verändert wurde, ob es eine steigende oder fallende Flanke war und den Zeitpunkt entsprechend abspeichern. Nach einer fallenden Flanke die Differenz der Zeitpunkte berechnen und schon weißt wie lange der Impuls war. Die Impulslänge kannst dann so umrechnen wie du es brauchst. Gruß Michael
Ich hatte eigentlich schon gewundert, wie du den Copter gerade in der Luft halten willst. Dann geht es nicht anders, wenn du die Kanalinformationen "unterwegs" noch manipulieren musst. Da sollte dann jeder mit einem aktuellen tiny und einem breiteren Port gehen. Tiny 861 vielleicht. Den gibt's auch in klein.
Jop genau. Jetzt hätte ich da noch eine Idee. Ich habe hier ein KK Board V2.1 Ist die Grüne Version. Den gibt es bei den lieben Chinesen und nennt sich: HobbyKing_Multi_Rotor_Control_Board_V2_1_Atmega168PA Das Board war so ziemlich das erste was man bei HK kaufen konnte. Auf diesem Board ist ein Atmega168PA und man kann es als Aero, Bicopter, Tricopter, Quadrocopter und Hexacopter nutzen. Einfach die passende Firmware drauf... Das Board hatt 4 PWM Eingänge Motor, Querr, Höhenr, Seitenr und kann wie gesagt bis zu 6 Motoren/Regler über PWM ansteuern. Jetzt habe ich mir volgendes gedacht: Da ich ja für meine Copter solch einen Flightcontroller benutzen will, könnte ich doch wenn ich den Quellcode habe die PWM Frequenz an den Ausgängen erhöhen und da direkt meine Fets dran machen. Ist ja gnau so wie ich jetzt mit meinem Atmega8 das gemacht habe. So wer suchet der findet. Hab mir die halbe Nacht um die Ohren geschlagen und nach dem Quellcode für diese Boards gesucht und auch fündig geworden. Allerdings ist der Code für die Blue Version. Der hat bis aufm Controller genau die gleichen Komponenten drauf. Am anfang vom Code jedoch für 168 und 328 Megas. Soweit so gut. Hab mir den Code angeschaut und gesucht. Auch etwas gefunden wo die Frequenz der Aufgänge fest gelegt werden. Da steht im Kommentar 50HZ. Ich wollte gern mal etwas rum probieren nur das Problem ist das mein Compiler mir einen Strich durch die Rechung macht und zich Fehlermeldungen rausspukt. Naja ich lad euch mal den Code hier als Dateianhang hoch, vielleicht hat der eine Oder Andere ja ne Idee wie mal den Code Compilieren kann. Break; :-) Achja ich hab mit Hilfe eines Freundes es hin bekommen in mein Atmega8 ein PWM vom Empfänger/Servotester an zulegen und am Ausgang ein Schönes PWM mit ca 450 HZ rauszuspucken. Kann den Motor jetzt schön steuern. Werde die Auflösung noch etwas erweitern und gut ist. Es seiden irgendwer hat nen besseren Vorschlag. Hier mein Code für Mega8:
1 | #include <avr/io.h> |
2 | #include <avr/interrupt.h> |
3 | #include <util/delay.h> |
4 | |
5 | #define F_CPU 4000000UL
|
6 | |
7 | volatile int flanke=0; |
8 | volatile int aktuell_pwm_l=0; |
9 | volatile int aktuell_pwm_h=0; |
10 | |
11 | ISR(TIMER1_CAPT_vect) |
12 | {
|
13 | if (flanke==0) |
14 | {
|
15 | TCNT1H = 0; |
16 | TCNT1L = 0; |
17 | TCCR1B&= ~(1<<ICES1); |
18 | flanke=1; |
19 | }
|
20 | else
|
21 | {
|
22 | flanke=0; |
23 | TCCR1B|=(1<<ICES1); |
24 | aktuell_pwm_l=ICR1L; |
25 | aktuell_pwm_h=ICR1H; |
26 | }
|
27 | }
|
28 | |
29 | void init_prozedur(void) |
30 | {
|
31 | TCCR1B |= (1<<WGM12) | (1<<ICNC1)|(1<<ICES1)|(1<<CS11) | (1<<CS10); |
32 | TIMSK |= (1<<TICIE1); |
33 | |
34 | sei(); |
35 | }
|
36 | |
37 | int main (void) |
38 | {
|
39 | init_prozedur(); |
40 | |
41 | DDRB=0x06; |
42 | TCCR1A = (1<<WGM10)|(1<<COM1A1)|(1<<COM1B1); |
43 | |
44 | while(1) |
45 | {
|
46 | if (aktuell_pwm_l >= 60 && aktuell_pwm_l < 65) |
47 | {
|
48 | OCR1A = 255; |
49 | }
|
50 | if (aktuell_pwm_l >= 65 && aktuell_pwm_l < 70) |
51 | {
|
52 | OCR1A = 231; |
53 | }
|
54 | if (aktuell_pwm_l >= 70 && aktuell_pwm_l < 75) |
55 | {
|
56 | OCR1A = 210; |
57 | }
|
58 | if (aktuell_pwm_l >= 75 && aktuell_pwm_l < 80) |
59 | {
|
60 | OCR1A = 189; |
61 | }
|
62 | if (aktuell_pwm_l >= 80 && aktuell_pwm_l < 85) |
63 | {
|
64 | OCR1A = 168; |
65 | }
|
66 | if (aktuell_pwm_l >= 85 && aktuell_pwm_l < 90) |
67 | {
|
68 | OCR1A = 147; |
69 | }
|
70 | if (aktuell_pwm_l >= 90 && aktuell_pwm_l < 95) |
71 | {
|
72 | OCR1A = 126; |
73 | }
|
74 | if (aktuell_pwm_l >= 95 && aktuell_pwm_l < 100) |
75 | {
|
76 | OCR1A = 105; |
77 | }
|
78 | if (aktuell_pwm_l >= 100 && aktuell_pwm_l < 105) |
79 | {
|
80 | OCR1A = 84; |
81 | }
|
82 | if (aktuell_pwm_l >= 105 && aktuell_pwm_l < 110) |
83 | {
|
84 | OCR1A = 63; |
85 | }
|
86 | if (aktuell_pwm_l >= 110 && aktuell_pwm_l < 115) |
87 | {
|
88 | OCR1A = 42; |
89 | }
|
90 | if (aktuell_pwm_l >= 115 && aktuell_pwm_l < 120) |
91 | {
|
92 | OCR1A = 11; |
93 | }
|
94 | if (aktuell_pwm_l >= 120 && aktuell_pwm_l < 125) |
95 | {
|
96 | OCR1A = 1; |
97 | }
|
98 | }
|
99 | }
|
LG Shabi PS: Sorry für den riesen Text ;-).
Na wenn Du die Sourcen vom Flightcontroll bekommen hast, besorg Dir doch einfach die Sourcen vom Brushless Motor Speed Controller und ändere dort die Software auf Brushed. Ist einfacher, denke ich mal...
Shabi N. schrieb: > 450 HZ Copter-Regler arbeiten mit 400kHz... (oder so ähnlich). Deinen kann ja sogar ich trotz Tinitus noch hören.
Hi Shabi, warum der Aufwand? MultiWii kann doch auch direkt PWM für Bürstenmotoren erzeugen. Dann brauchst du nur noch 4 fets und gut ist es. Wenn du es noch leichter haben willst, kannst du auch den Empfänger noch integrieren: http://www.rcgroups.com/forums/showthread.php?t=1798913 Da haben die Jungs ein Flysky Modul direkt in Multiwii integriert (ziemlich weit hinten im Thread). Wenn du da ein Board komplett selbst designed kommst du da auf jeden Fall unter dein angestrebtes Gewicht! So etwas gibt es auch fertig z.B. http://www.goodluckbuy.com/mini-micro-arf-quadcopter-mwc-flight-control-multicoptermotor-prop-kit-new-version.html Ich hab auch mal vor so einen Microcopter auf MultiWii Basis aufzubauen. Mit oder ohne "angeflantschtes" FlySky Modul. Könnten uns da ev. zusammentun. Warum hast du eigentlich nicht den Code benutzt zum umrechnen den ich dir mal gepostet hab?
Hej Kille das ist ja mal der Hammer. Der kleine Copter und das für den Preis... Die Idee mit dem Multiwii ist garnicht mal so schlecht. Hab mal etwas gegooglet und heraus gefunden das einige die Arduino pro mini nehmen und die multiwii 1.8 drauf machen. Die 1.8 hat direkt PWM für Fets... Also ich weiß definitiv das man sogar mit nem Atmega8 einen kompletten Copter bauen kann. Im Mega8 ist dann alles drin von der Regler Funktion bis hin zu auswertung von 3 Achs Gyros um die Lage zu steuern... Es gibt einen Typen der sowas selber entwickelt hat und fliegt ist der Hammer. Muss mal Seine Homepage raussuchen... Seine Modell hießen glaub ich Smartflyer oder Smarty. Ich baue schon seit ca 2,5 Jahren Copter und träume seit dem immer davon einen Ultra Microcopter zu entwickeln und bauen. Aktuell habe ich noch 4 Niegel Nagel neue XCopter mit 600mm und das Multiwii 328P Board drauf. Fix und fertig und sehr sauber gebaut nur noch empfänger dran und los gehts... Also wer Interesse hat.... :-) Um auf dein Angebot zurück zu kommen; einen Copter zusammen zu entwickel wäre nicht schlecht. Ich habe alles was Maschinen angeht da. Große Portal CNC Fräse, Drehmaschine, normale Fräsmaschine... Also das Standart Werkzeug was man halt so hat. Platinen fräsen ist auch kein Thema. Meine ganzen Stromverteiler Boards für die Copter fräse ich auch selber. Also wann wollen wir loslegen? LG Shabi
Hi Shabi, Multiwii ist mittlerweile schon bei 2.2 und PWM ist Standardfuntkon. Schau mal hier: http://www.ebay.de/itm/RC-MultiWii-NanoWii-ATmega32U4-Micro-Flight-Controller-USB-GYRO-ACC-on-Board-/121101526837?pt=RC_Modellbau&var=&hash=item1c3236a735 Die Seite von Smartflyer hab ich gefunden. Aber ich denke Multiwii ist hier die Plattform der Wahl. Auch nur ein Controller für alles! Incl. der großen Comunity! Werde mir vielleicht mal ein Multiwii Board holen und ein wenig experimentieren mit dem Code von den rcgroups jungs. Finde das sehr spannend die Möglichkeit den Flysky Empfänger direkt auf dem Board zu integrieren. Kleiner und leichter geht es bei einem Eigenbau dann wohl nimmer! Mal sehen wo da die grenze liegt. Kleiner als der Hubsan X4 sollte es schon werden! Auch sollte der ganze Copter dann preislich in etwa bei den Kosten für ein einzelnes Multiwii Board liegen. So eine extra designete Platine kann mann praktisch nicht mehr selbst fräsen... Aber für die Fälle gibt es ja die Dienstleister. Zeitlich bin ich etwas eingespannt. Muss noch meine Wort Uhr fertig bauen, einen neuen Job suchen, in den Urlaub fahren, CP-Heli fliegen lernen usw... also immer noch zeit am Abend ein Board zu entwickeln ;-)! Mach mir mal ein Angebot für dein Copter per PM! Grüße
Ist schon eine Weile her das hier was geschrieben wurde, aber ist es da zu einer lösung gekommen? Stehe vor dem selben problem, allerdings gleich für 6 Motoren (Hexacopter). Mit Multiwii ist es nicht möglich, da von der Firmware nur 4 Motoren (wenn pwm -> fet) unterstützt werden. Das soll wohl angepasst werden können, aber da hab ich keine wie. Wenn jemand eine Idee zu dem Einen oder dem Anderen hat, bin ich für jede Hilfe dankbar. Gruß Patrick
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.