Hallo Ich brache im Rahmen einer Projektarbeit eine Matrix mit mehreren Abstandsensoren, deshalb muss ich auf sehr auf den Preis eines einzelnen schauen. Der zu messende Abstand ist Maximal 3-4 Meter und muss auch nicht sehr genau sein. Die IR Abstandssensoren für 3-4 Meter kosten jedoch auch um die 15€ pro Stück. Ich habe jetzt einen Ultraschall Abstandsensor gefunden HC-SR04. http://www.robodino.de/2011/12/ultraschall-distanz-sensor-hc-sr04.html Hat jemand erfahrungen mit diesen Teil, hält es was es verspricht? Stören sich mehrere Ultraschall Distanzmesser wenn man sie gleichzeitig betreibt oder ist ein messbarer Frequenzunterschied? Danke Franzman
Franz F. schrieb: > Hat jemand erfahrungen mit diesen Teil, hält es was es verspricht? Das ist ein "Standardbauteil", das von vielen eingesetzt wird. Aber die Frage ist doch eher, ob es hält, was du dir davon versprichst. Mit Ultraschall wirst du z.B. kleine oder schmale Objekte nicht zuverlässig erkennen können. > Stören sich mehrere Ultraschall Distanzmesser wenn man sie gleichzeitig > betreibt oder ist ein messbarer Frequenzunterschied? Du selber initiierst die Messung. Also solltest du klugerweise mit der nächsten Messung warten, bis die vorige fertig ist. Dann gibts keine Probleme.
ab welcher größer werden dann Objekte nicht mehr erkannt? weißt du das ungefähr?
Ich hab so ein Ding in Betrieb, meine Erfahrung damit ist eher die umgekehrte, nämlich dass ein kleines Hindernis (Ein Finger in zehn cm Entfernung) reicht, dass er nur den Abstand bis dahin misst statt bis zur weiter entfernten Wand. Das ist vermutlich der Grund, wieso man Sender und Empfänger bei den Ultraschall-Einparkhilfen fürs Auto so weit auseinandersetzt, aber ist nur ne Vermutung, genau weiss ich es nicht.
Ich habe meinen Nibobee Roboter mit einem ganz billigen Ultraschall-Sensor (SRF-02) ausgestattet. Er reagiert auch (3cm) Stuhlbeine zuverlässig. Allerdings hat der Sensor massive Probleme in den Räumen unterm Dach, wo die Wände schräg verlaufen. Da misst er alles, nur nichts sinnvolles. Ich hätte wohl besser doch einen optischen Sensor genommen. In "normalen" Räumen arbeitet der Sensor allerdings prima. Lego Mindstorms versagt ebenfalls im Dachgeschoss :-(
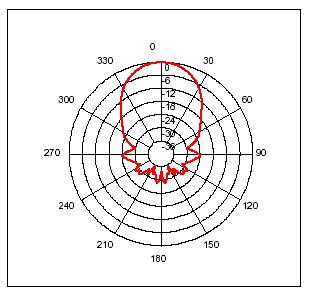
@ Franz Ultraschallsender haben einen sehr kleinen Abstrahlwinkel. Ich denke, daraus resultieren die meisten Probleme. Beim Auto z.B. wird auf eine Entfernung von 2 m der hohe Bordstein erkannt. Fährst Du aber darauf zu, so geht der Strahl darüber hinweg und bis zum Crash ist stille. Ein schmales Stuhlbein wird, je nach Energie und Empfindlichkeit, auf recht große Entfernung erkannt. Fährst Du aber seitlich darauf zu, so verschwindet es sehr schnell aus deinem Blick-/Strahlfeld. Darüber hinaus gibt es Schallschlucker (Oberflächen die nicht reflektieren) und Reflektoren (Oberflächen die zwar gut reflektieren aber nicht unter "deinem" Winkel). Mein Staubsauger hat z.B. Probleme mit Türstoppern. Der Strahlemann, genau in Fahrtrichtung, sitzt einfach zu hoch (ca. 5-6 cm). Wahrscheinlich erkennt die Software das Teil auf etwas größere Entfernung aber beim darauf Zufahren verschwindet es unter dem Schallfeld und Computy denkt: „Die Bahn ist frei“. Da die Konstrukteure diesen Fall nicht vorgesehen haben, ist auch direkt vorne kein Kollisionssensor.
Franz F. schrieb: > Stören sich mehrere Ultraschall Distanzmesser wenn man sie gleichzeitig > betreibt oder ist ein messbarer Frequenzunterschied? Du mußt drauf achten, dass die Sensoren nicht selbständig dauernd messen, sondern nur, wenn man sie per Triggerimpuls dazu auffordert. Dann kann man sie schön der Reihe nach messen lassen. Sonst gibt das ein heillosen Durcheinandergebrabbel. Was meinst du mit "... oder ist ein messbarer Frequenzunterschied"?
Angehängte Dateien:
-

beam.gif
5,4 KB
{kind=link}
amateur schrieb: > Ultraschallsender haben einen sehr kleinen Abstrahlwinkel. Nein, leider nicht. (SRF05, von http://www.robot-electronics.co.uk/htm/srf05tech.htm )
Tom K. schrieb: > amateur schrieb: >> Ultraschallsender haben einen sehr kleinen Abstrahlwinkel. > Nein, leider nicht. Dem kann abgeholfen werden, entweder mit einem Phasen-Array oder einem Reflektor http://www.mikrocontroller.com/jufo/kapitel1.htm
Hallo Leute Danke erstmal, sry dass ich erst so spät antworte. Das mit dem Frequenzunterschied hat sich geklärt, Lothar hat diese Frage bereits geklärt. Wir steuern sie einfach Zeitversetzt an. Bei der Genauigkeit der Sensoren gibt es für unsere Ansprüche auch keine Probleme. Muss nicht so genau sein. Das Problem mit den schiefen Wänden ist für uns eher relevant. Wir werden dass ganze mal testen. Danke Franz
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.