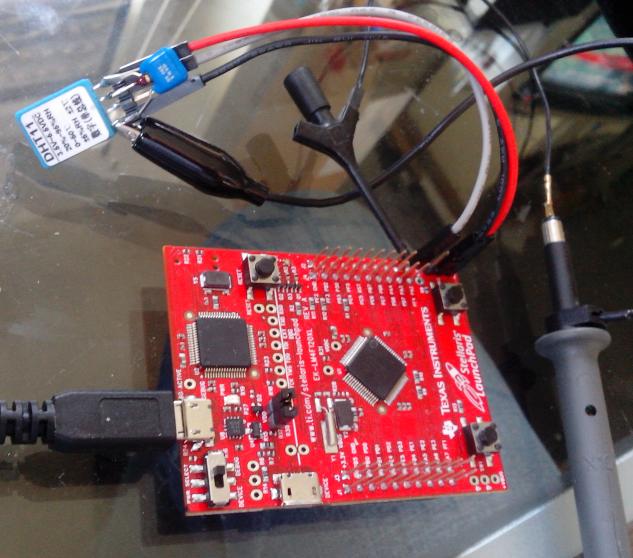
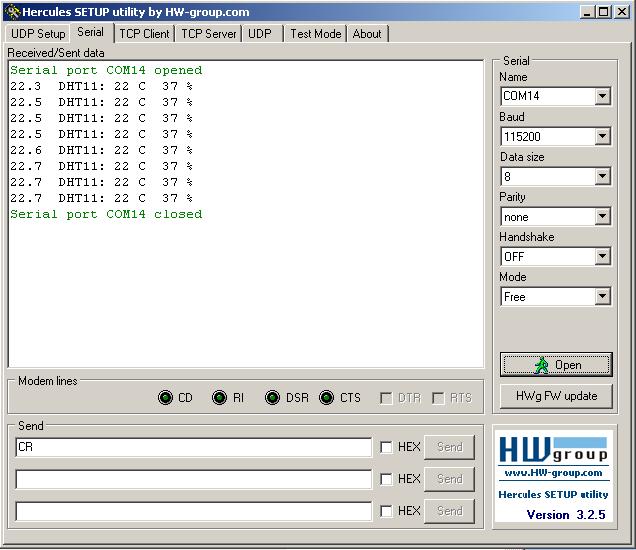
Texas Instrument bietet mit dem Stellaris ARM Launchpad ein äußerst leistungfähiges Mikrocontrollerentwicklungsboard für einen Preis um 5 Euro an. Günstiger gehts nicht. (auch in D erhältlich bei watterott electronic), insbesondere da dieses Board auch den Programmer und eine Spybywire Debugmöglichkeit enthält. Das Board wird mit einem USB Kabel mit dem Entwicklungsnotebook oder PC verbunden, damit ist die Stromversorgung gesichert, die Programmierung und die Debugmöglichkeit von der IDE erfolgt ebenfalls über diese USB Verbindung und weiterhin kann das Mikrocontrollerprogramm gleichzeitig über eine virtuelle COM Schnittstelle und einer der integrierten UART Schnittstellen serielle Ausgaben zu einem Terminalprogramm des Entwicklungsrechner schicken. (Natürlich erst nach der Installation der USB Treiber für das Launchpad). Der Controller LM4F120H5QR basiert auf der ARM Cortex 32 Bit Architektur mit einer Vielzahl von internen Hardwarekomponenten (zB. 2 12 Bit ADC, 12 Timer, 1 CAN, 1 USB, 8 UART) 256kB interner Flash und 32 kB RAM. (http://www.ti.com/lit/ds/symlink/lm4f120h5qr.pdf) Die wesentlichen Treiberfunktionen für die interne Hardware sind im internen ROM des Controllers bereits vorcompiliert enthalten. Die entsprechenden Routinen werden von TI in der Stellarisware Firmware frei zur Verfügung gestellt. ( http://www.ti.com/lit/ug/spmu019o/spmu019o.pdf ). Als Entwicklungsumgebung gibt es verschiedene Möglichkeiten, ich habe mich für die IAR IDE entschieden, die einigermaßen einfach zu handhaben ist und in der frei verfügbaren Version bis zu 32 kB Code erzeugen kann, zum Testen also ausreichend. Mit dieser IDE habe ich auch bereits das MSP430 (Beitrag "MSP430 Launchpad lcd Ansteuerung, Vergleic. Atmel AVR") Launchpad getestet. TI bietet mit dem Code Composer Studio eine auf Eclipse basierende IDE an, die keine Einschränkungen hat, aber auch sehr Komplex zu handhaben ist. Die Installation der IDE und der notwendigen Treiber zur Kommunikation mit dem Board ist eine erste zu meisternde Klippe, die zu Problemen führen kann, wenn zB. das Programmverzeichniss und die Software nicht in den üblichen Stammverzeichnissen auf Laufwerk C sondern auf einer anderen Festplattenpartition liegen soll. Nun liegt es nahe, diese Platform mit dem im Hobbybereich gerne verwendeten 8 Bit Avr Microcontrollern zu vergleichen, da insbesondere die integrierte Hardware reizt. Man darf aber nicht vergessen, das eine 32Bit Architektur um Größenordnungen komplexer zu handhaben ist. Insbesondere die integrierte Hardware muss verstanden sein. Andererseits braucht man sich wegen der Verfügbarheit der Stellarisware Firmware mit den Treiberfunktionen nicht mehr direkt um die einzelnen Hardwareregister zu kümmern (wie man dies häufig noch bei den 8 Bit Avr macht), sondern kann die entsprechenden Stellariswarefunktionen benutzen. Aber auch diese müssen mit ihren vielen vordefinierten Parametern erst einmal beherscht werden, allein um die auf dem Launchpad vorhandenen 3 LEDs zum blinken zu bringen sind etliche Funktionsaufrufe erforderlich. Für meine ersten Versuche habe ich eine Software entwickelt, welche mit einer Timerinterruptroutine die rote und die blaue LED im 5Hz und 0.5 Hz Rhythmus blinken läßt. Alle 2 s wird außerdem der interne ADC ausgelesen, welcher den internen Temperatursensor digitalisiert. Außerdem wird ein simpler DHT11 Temperatur und Feuchtigkeitssensor über die 1wire Schnittstelle ausgelesen, für das korrekte Timing waren hier einige Experimente mit verschiedenen Verzögerungszeiten notwendig. Die ermttelten Werte werden mit einem der UARts über die virtuelle COM Schnittstelle zum PC geschickt. Sobald man sich mit den neuen Möglichkeiten vertraut gemacht hat, kommt einem die 8 Bit Welt sehr einfach vor. Allerdings um LEDs blinken zu lassen, ADC auszulesen und eine UART anzusprechen ist dies wie mit Kanonen auf Spatzen zu schiessen. Die eigentliche Leistungsfähigkeit der Platform wird man erst bei rechenintensiven Problemen, wie zB. Mustererkennung, Sprachanalyse etc. durch die Verwendung der integrierten Fließkommarecheneinheit ausnutzen können. Auch die Verwendung von kleinen Echtzeitsbetriebsystemen wie zB. das frei verfügbare freeRTOS ist möglich. Ich kann also dieses kleine Platinchen für eigene Experimente mit nach oben offener Leistungsfähigkeit nur empfehlen.
Angehängte Dateien:
-

stellaristest.jpg
55 KB -

StellarisCOM.jpg
53 KB
Danke, schönes Demoprogramm, das mit den umschaltbaren RAM-/ROM-Funktionen war mir so nicht bekannt. Damit es mit einem "stand-alone" ARM GCC kompiliert, benötigt es noch ein #define. Kompiliert hat es dann mit
1 | #define TARGET_IS_BLIZZARD_RA1 |
kann aber nicht prüfen, ob das stimmt (warte noch auf die Lieferung). Fehlt da noch etwas:
1 | // Timer0 IntHandler in startup_ewarm.c eingetragen!! |
und beim UART sieht es so aus, als ob Interrupts aktiviert werden. Fehlen da evtl. die ISRs? Geht das nicht auch ohne die FIFOs? > Man darf aber nicht vergessen, das eine > 32Bit Architektur um Größenordnungen komplexer zu handhaben ist. Man darf getrost diese Behauptung vergessen, denn sie ist nicht richtig. Oft wiederholt, meistens ohne Belege. Bitte immer PROGMEM, boot loader, fuses usw. einbeziehen und auch an die Klimmzüge oder Trampoline denken, welche bei > 64K Zugriffen nötig sind. > Andererseits braucht man > sich wegen der Verfügbarheit der Stellarisware Firmware mit den > Treiberfunktionen nicht mehr direkt um die einzelnen Hardwareregister zu > kümmern (wie man dies häufig noch bei den 8 Bit Avr macht), sondern > kann die entsprechenden Stellariswarefunktionen benutzen. Ist das ein Fortschritt? Das wird kontrovers diskutiert, sofern es um die Funktionen geht, welche nicht im ROM sind. Die im ROM haben den Charme, dass man Flash sparen kann. > allein um die auf dem Launchpad vorhandenen 3 LEDs zum > blinken zu bringen sind etliche Funktionsaufrufe erforderlich. Das ist nur die halbe Wahrheit: Es geht auch mit Null Funktionsaufrufen. Ich warte immer noch auf meine Lieferung, deshalb weiß ich nicht, ob das folgende Fragment funktioniert:
1 | // Enable the GPIO port |
2 | SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; |
3 | |
4 | // direction as output, and enable the GPIO pin for digital function |
5 | GPIO_PORTF_DIR_R = 0x08; |
6 | GPIO_PORTF_DEN_R = 0x08; |
7 | |
8 | // Turn on the LED. |
9 | GPIO_PORTF_DATA_R |= 0x08; |
10 | |
11 | ... |
12 | |
13 | // Turn off |
14 | GPIO_PORTF_DATA_R &= ~(0x08); |
> für das korrekte Timing waren hier einige > Experimente mit verschiedenen Verzögerungszeiten notwendig. Woran lag das? An den Timings oder an dem Korrekturfaktor? SysCtlDelay() ist auch nur eine for-Schleife,
1 | #if defined(codered) || defined(gcc) || defined(sourcerygxx) |
2 | |
3 | void __attribute__((naked)) |
4 | |
5 | SysCtlDelay(unsigned long ulCount) |
6 | |
7 | {
|
8 | |
9 | __asm(" subs r0, #1\n"
|
10 | |
11 | " bne SysCtlDelay\n" |
12 | |
13 | " bx lr"); |
14 | |
15 | } |
16 | |
17 | #endif |
insofern ist
1 | ms = ROM_SysCtlClockGet()/3000; |
2 | us = ms/1000; |
3 | |
4 | ROM_SysCtlDelay( 20*ms ); |
nur bedingt korrekt. Das Ding hat zwischen 12 und 25 Timer, da kann man sogar einen der 64-Bit-Timer opfern, um die Verzögerungen sauber zu messen. Wenn ich richtig gerechnet habe, muss man sich da um Überlaufe keine Sorgen mehr machen ... In InitTimer verwendest Du SysCtlClockGet() ohne ROM_ - Präfix. Dieser Tippfehler kostet Dich 512 Byte Flash :-) Anders formuliert, die vier gesparten Zeichen im Quelltext kosten Dich 25% mehr Flash :-) Die ROM-Variante kommt auf (4.6.2, -Os) arm-none-eabi-size text data bss 2188 0 513 also noch in der attiny/msp430 2k Flash Liga. Die Flash-Variante kommt auf text data bss 3964 0 513 M. W. haben die kleinsten Stellaris CM3 16k Flash, die CM4 32k Flash, insofern kann das schon interessant sein. Bitte die "Mäkelei" nicht falsch verstehen, ich finde das Demoprogramm ziemlich gut. Kompakt und alles drin, was man benötigt, um das Ding zum Fliegen zu bringen (wenn es dann mal da ist).
Vielen Dank für die konstruktiven Anmerkungen. Dies sind meine ersten Erfahrungen mit der 32 Bit ARM Architektur. Da ich hier nur den UART Tx benötige, habe ich den ursprüngliche benutzten UART Interrupt, der ausgelöst wird wenn der Tx FIFO bis zu einem vorgegeben Limit geleert ist, dann nicht mehr benutzt. Hier kann also noch aufgeräumt werden. Die Probleme mit dem Timing des DHT11 lagen nicht an den Verzögerungsroutinen, sondern an der mir nicht vollständig vorliegenden Dokumentation des vom DHT11 verwendeten 1wire Protokolls. In der Interruptvektortabelle, die von der IAR IDE automatisch im Projekt als startup_ewarm.c eingebunden wird, muss anstelle eines vorhandenen default handlers die Timer0 ISR eingetragen werden. Der Tippfehler in der SysCtlClockGet() in InitTIMER (statt ROM_Sy... ) kostet natürlich nicht 25% des Flash Speichers, da wir im LM4F120H5 256kB haben, sind die 512Byte natürlich vernachlässigbar ;-)
Bei CM3 hat man meistens den SysTick Timer laufen. Damit lassen sich gut Verzoegerungen realisieren, die recht unabhaengig von Takt und 0ptimierungsgrad des Kompilers sind: Man zaehlt die Differenzen des Zeahlerstandes des SysTickTimers. Oder man macht das mit dem DWT Timer.
Axel Schnell schrieb: > kostet natürlich nicht 25% des Flash Speichers, da wir im LM4F120H5 > 256kB haben, sind die 512Byte natürlich vernachlässigbar ;-) In der Text-Sektion des Kompilats schon. Die "ROM-optimierte" Version belegt ca. 2k. Die "nicht optimierte" 2.5k. Ja, das ist in dem Fall Haarspalterei :-) Im Fall von 16k/32k Flash ... in größeren Stückzahlen ... wenn der Flash knapp wird ... das hat schon was mit den ROM-Funktionen. Das macht in diesem Beispiel 50% oder 2k aus. Uwe Bonnes schrieb: > meistens den SysTick Timer Der ist schön portabel, macht nur leider bei 24-Bit schon Feierabend :-)
Abver Du hast doch 32-bit Variable um die Differenzen der 24 bit
aufzuaddieren.
Aus den NutOs Quellen:
void NutMicroDelay(uint32_t us)
{
#ifdef _NUT_EMULATION_
usleep(us);
#elif defined(_CORTEX_)
int32_t start_ticks;
int32_t current_ticks, summed_ticks=0;
int32_t end_ticks;
start_ticks = SysTick->VAL;
end_ticks = (us * (SysTick->LOAD +1))/NUT_TICK_FREQ;
/* Systick counts backwards! */
while (summed_ticks < end_ticks)
{
current_ticks = SysTick->VAL;
summed_ticks += start_ticks - current_ticks ;
if (current_ticks > start_ticks)
summed_ticks += (SysTick->LOAD +1);
start_ticks = current_ticks;
}
#elif defined(_AVR_LIBC_VERSION_)
Uwe Bonnes schrieb: > Abver Du hast doch 32-bit Variable um die Differenzen der 24 bit > aufzuaddieren. Das war meinerseits nicht wirklich ernst gemeint, ich schiebe nur "Frust" wg. der verlorenen 8-Bit :-)
Wenn es 32 Bit sein soll, dann schalte den DWT Zähler ein. Der hätte aber auch gerne 64 Bit haben können ;-)
Uwe Bonnes schrieb: > Bei CM3 hat man meistens den SysTick Timer laufen. Damit lassen sich gut > Verzoegerungen realisieren, die recht unabhaengig von Takt und > 0ptimierungsgrad des Kompilers sind: Man zaehlt die Differenzen des > Zeahlerstandes des SysTickTimers. Oder man macht das mit dem DWT Timer. Bei "wirklich großen" delays (die ein vielfaches des SysTick-Intervalls haben; also gaaanz viele ms), kann man das so machen. Oft braucht man aber gerade bei Sensoren etwas im µs-Bereich, und da muß man dann schon einen "richtigen" Timer benutzen.
Lutz schrieb: > Oft braucht man > aber gerade bei Sensoren etwas im µs-Bereich, und da muß man dann schon > einen "richtigen" Timer benutzen. Und? Warum soll da das pollen auf die Differenz im Systick Counter nicht funktionieren?
Lutz schrieb: > Bei "wirklich großen" delays (die ein vielfaches des SysTick-Intervalls > haben; also gaaanz viele ms), kann man das so machen. Oft braucht man > aber gerade bei Sensoren etwas im µs-Bereich, und da muß man dann schon > einen "richtigen" Timer benutzen. Weil: For delays below 100 microseconds, the deviation may increase above 200%. Bis zu Faktor 4 Fehler läßt wohl so ziemlich jedes Timing versagen.
Lutz schrieb: > For delays below 100 microseconds, the deviation may increase above > 200%. Interessant. Quelle?
Die von Uwe genannte Quelle: Nut/OS http://www.ethernut.de/api/group__xg_timer.html#gad28bfb11b33161792bea7f571133589e
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.