Hallo Zusammen, ich habe zwei ältere Minertia Servo Motore des Typs T01L-ST43, die ich gerne in einem CNC Projekt verbauen möchte. Die Motore haben einen angeflanschten Rotationsencoder (Typ. utopi-020has), aus dem ein 10 poliges Flachbandkabel herausgeführt wird. Das Problem an der Sache ist, dass ich auch nach längerer Suche kein Datenblatt zur Pinbelegung des Encoders finden konnte. Weiß zufällig jemand, wie diese Bauteile beschaltet werden? Grüße, Jan
Hallo Ich hab das selbe probleem. Ich komme ous holland so enshuldige fur meinem deutch. Kunnen Sie mich antwoord geben wan du einem antwoord bekomst. Shon fiele dank. Gruss Marcel
Hallo Marcel, ich habe das Teil auseinander genommen und einen Logik-IC gefunden. Dieser hat ein Datenblatt. VCC und GND werden direkt nach draußen geführt. Wollte das in nächster Zeit mal durchmessen, der Rest der Pinouts ist dann der Output des Encoders. Ein Kanal sollte der Z-Kanal (Nullpunkt-Signal) sein, einer A- und einer B-Kanal. Die große Frage dabei ist, ob das ganze als TTL oder Differential-Pegel am Ausgang anliegt. Hoffe, es antwortet noch jemand anderes, sonst muss ich messen... Grüße, Jan
hallo Jan Ich denke das est ttl iest wie alles was ich gefonden hat war mit ttl encoders auf die yaskawa site. gruss Marcel
Hallo Jan Habben Sie fileicht das datenblatt fur mich, oder andere information. Dan kann ich wann ich zeit habbe Auch mall soechen wie die pinout iest. Shon herzlichen dank. Marcel
Die Nummer des IC ist lesbar, wenn man die Platine vom Motor abschraubt. Bin leider noch nicht zum Messen gekommen. Gruß, Jan
Also, der IC ist ein LM2903. Die Pins am Ende des Kabels sollten so sein: ? B ? ? VCC ? ? ? GND A -------___--------- Ich tippe bei VCC auf 5V, bin mir damit aber nicht sicher. Alle Angaben ohne Gewähr. Grüße, Jan
Schreib mir bitte ob es geklappt hat, Marcel. Ich würde VCC langsam von 1,2 bis 5V hochdrehen und messen, wann es eine Ausgabe gibt. Grüße, Jan
Angehängte Dateien:
-

doormeten_encoder.PNG
2,7 KB
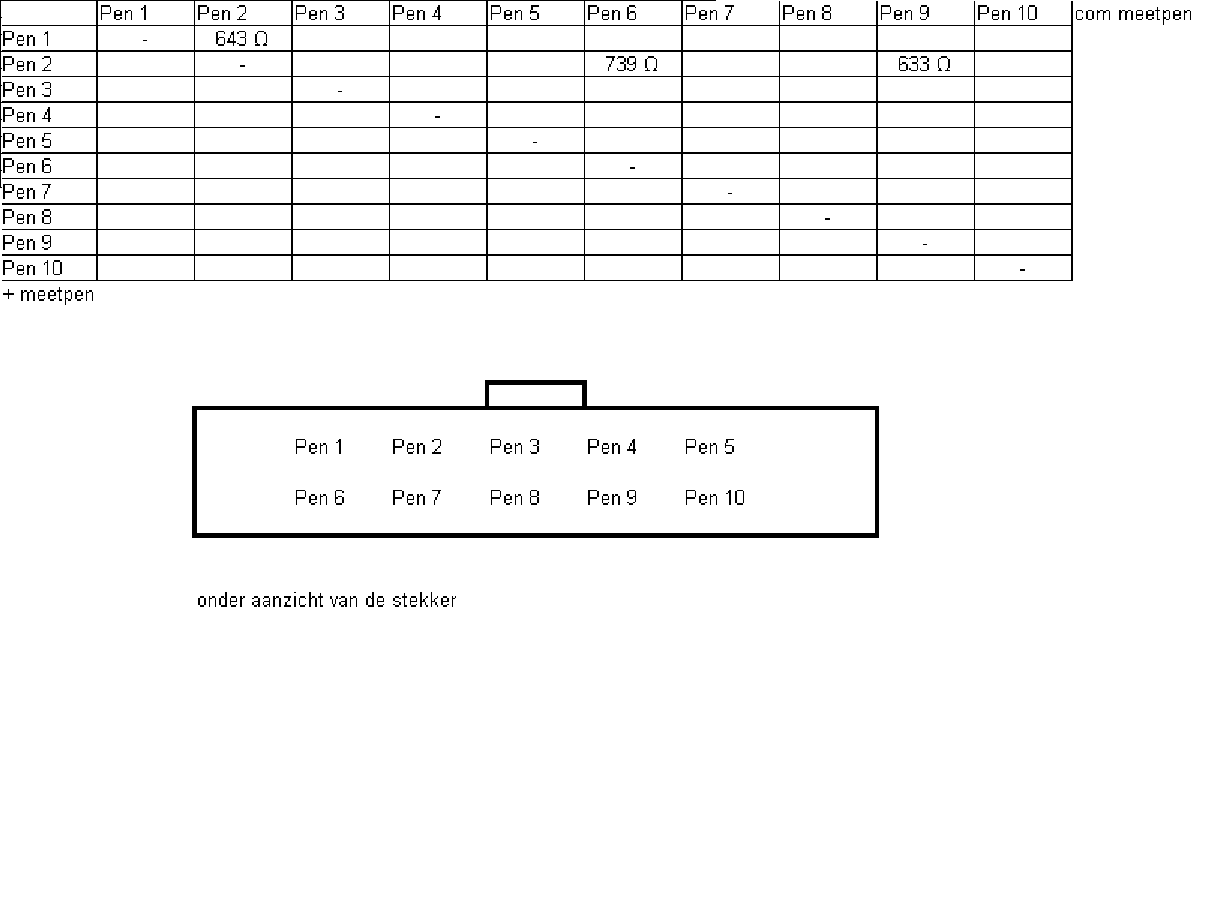
Ich habe gemessen und das war das Ergebnis Ich hoffe das es hilft gruss Marcel
Jan F. schrieb: > Also, > > der IC ist ein LM2903. > > Die Pins am Ende des Kabels sollten so sein: > > ? B ? ? VCC > ? ? ? GND A > > -------___--------- > > > Ich tippe bei VCC auf 5V, bin mir damit aber nicht sicher. > > Alle Angaben ohne Gewähr. > > > Grüße, > > Jan Ich habe diese Pinbelegung ausprobiert und sie funktioniert mit 5V. Hoffe, das hilft weiter. Wofür die anderen Pins sind kann man dann ja später rausfinden. Die Schrittinformation ist jedenfalls ein TTL-Pegel auf A und B. Grüße, Jan
Hallo Jan Hast du nog die andere pinbelegung gefunden? Ich hab nichts mer gefunden. gruss Marcel
Du kannst den Motor öffnen und an der LEiterplatte relativ einfach nachvoll ziehen, welche Signale woher kommen. Ein Ausgang müsste z.B. das Nullsignal der Encoderscheibe sein. Der Motor ist mir irgendwo verloren gegangen...
Habe den Motor gefunden. Der Encoder hat nur A und B nach außen geführt.
Zumindest bei mir ist der Z-Impuls nicht bestückt. Die anderen
Anschlüsse des Encoders zeigen eine kapazitive Einkopplung des A
und/oder B Signals. Schön ist, dass die Entprellung des A und B Signals
schon in Hardware stattfindet. Bei 5V zeiht das Modul ca. 30mA. Ab 2,6V
lief der Encoder bei mir. Ein Ferrite am Flachbandkabel und kleine
Kapazitäten im pF Bereich bieten sich zur Entstörung des Signals an.
Durch die Positionierung der Platine im Motor kannst du den Signalpegel
von A gegen B verschieben.
Lass mich wissen, wenn es läuft!
- B - - 3V3
- - - GND A
-------___---------
Du kannst auf Flankenwechsel von A B auslesen. Haben A und B in den
gleichen Pegel, so dreht der Motor links herum, sonst rechts herum:
__ __
A_____/ \___/ \___
__ __
B__/ \___/ \___
__ __
A_____/ \___/ \___
__ __
B_______/ \___/ \___
Grüße,
Jan
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.