Du hättest nicht nochmals schreiben müssen, dass du es nicht verstanden hast.
Ja hinz, bei der nächsten Verstärkerdiskussion sage ich dann, mein Verstärker ist absolut verzerrungsfrei. Da werden nur Harmonische überlagert, damit er besser klingt. Und wehe einer von euch motzt dann. LG old.
Du raffst es einfach nicht. Eine Psychotherapie könnte dir helfen.
Der Ahnungslooser aus der W. schrieb: > > Schauen wir mal nach: > >> https://de.m.wikipedia.org/wiki/Frequenzumrichter >> blättere bis "Optimierung durch Überlagerung von Oberschwingungen" >> >> Es geht um die Ströme durch die Motorwicklungen und nicht um die >> Spannung an den Anschlußklemmen gegen Netz-N gemessen. > > Hopa, da steht ja genau das was ich erklärt habe: . > "Die dadurch erreichte Leistungssteigerung des Frequenzumrichters sowie > eines daran angeschlossenen Antriebs liegt in der Regel bei etwa 15 %. > Das entspricht etwa dem Amplitudenverlust einer > 6-Puls-Drehstrom-Gleichrichterschaltung, welcher im Zwischenkreis etwa > 86 % der Spitzenspannung liefert." . > Pass mal auf: > 325V*1,15=374V Das ist die Zwischenkreisspannung die ihr haben > solltet. > > Und die Überlagerung mit Harmonischen nennt man nun mal Verzerrung. > > LG > old. Selten erlebt man jemanden, der eigentlich den Text lesen können müßte, aber jedes Detail missversteht. Wenn ich nicht wüßte, daß es sich um Darius handelt, würde ich auf Kurt tippen.
Ignoriert das Geschreibsel doch einfach. Diskussion ist sinnlos.
Carl D. schrieb: > würde ich auf K... tippen Aha, wo findet man seinen Frequenzumrichter für Motore? LG old.
Aus der W. schrieb: > Carl D. schrieb: >> würde ich auf K... tippen > > Aha, wo findet man seinen Frequenzumrichter für Motore? Der Kurt hat die gleiche Krankheit wie du.
H.Joachim S. schrieb: > Ignoriert das Geschreibsel doch einfach. Diskussion ist sinnlos. Deswegen hatte ich mir vor Kurzem eine Filterfunktion gewünscht, die würde die Bandbreite, die für die "einfach zu ignorierenden"-Beiträge verbraucht wird, einsparen. Und mich würde es vom Reflex befreien, darauf zu antworten. Ich würde das ja auch lokal ausblenden, aber das geht auf Pads nicht. Aber eigentlich hast du recht.
Angehängte Dateien:
-

20210519_164840.jpg
240 KB -

20210519_164826.jpg
240 KB

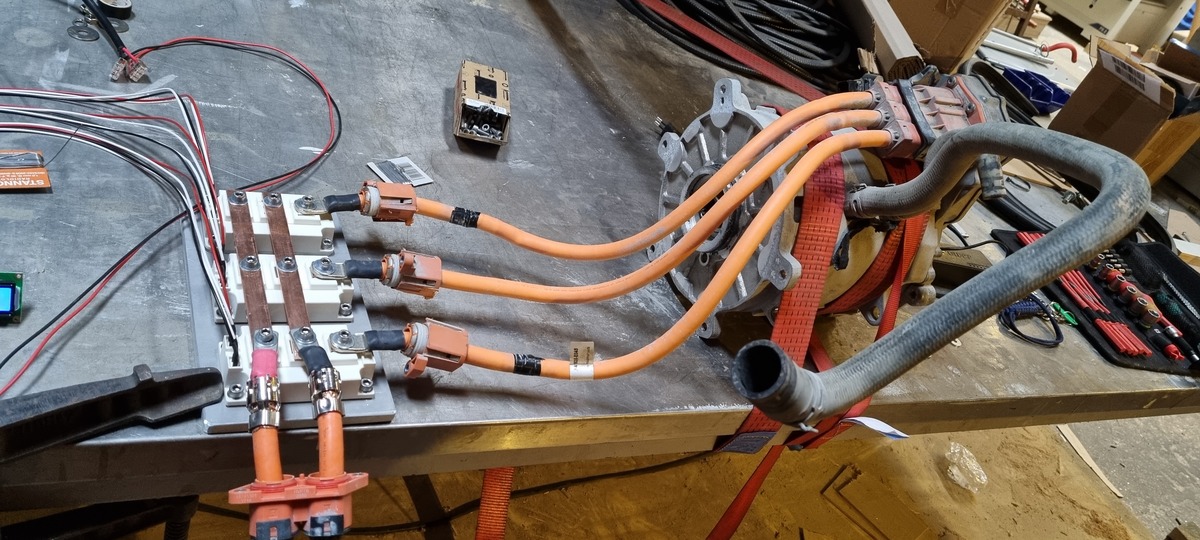
Hallo zusammen, ich habe da mal eine Frage, und ich hoffe ihr könnt mir helfen. Ein Freund von mir baut grade ein Boot und möchte den Motor aus einem alten Streetscooter benutzen, um es anzutreiben. Da die Autoelektronik nicht mehr funktioniert hat er mich bei der Ansteuerung um Hilfe gebeten. Ich habe daraufhin etwas recherchiert und diese Steuerung gefunden. Jedoch musste ich an dem Schaltplan einige Veränderungen vornehmen, da der Motor von einer Batterie gespeist wird und bis zu 200A ziehen kann. So habe ich den Gleichrichter gestrichen und Die IGBTs durch 300A IGBT-Module ersetzt, welche diese Last hätten bewältigen sollen. https://www.reichelt.de/igbt-array-modul-halbbruecke-1200-v-300-a-c2-0-gehaeuse-gd300hfy120c2s-p290179.html?&trstct=pos_1&nbc=1 Beim ersten Test haben wir dann langsam angefangen und bis ca. 10hz hochgedreht. Nachdem der Motor fast eine Viertel Umdrehung geschafft hatte sind zwei der IGBT-Module, alle IR 2110 Driver und der 12V DC/DC-Wandler in rauch aufgegangen. Die Optokoppler habe ich selbstverständlich wie in der Beschreibung erwähnten durch den Typ HCPL3180 ersetzt, um die 12v nutzen zu können. Nun die große Frage, was habe ich falsch gemacht? Ich wäre für jegliche Hilfe sehr dankbar.
Marvin T. schrieb: > Nun die große Frage, was habe ich falsch gemacht? Du hast vermutlich die falsche Schaltung gewählt. Solche Motoren haben Sensoren und die muss man auch nutzen. Du schreibst nichts über die verwendete Motorspannung, IGBT sind für Hochvolt Anwendungen gut, für Niedervolt sind MOSFets besser. Motoren mit Sensoren lassen sich preiswert mit BLDC Controllern aus dem Internet antreiben. Frequenzumrichter sind eher für Drehstrommotoren ohne Sensoren. Wenn man unbedingt einen BLDC mit diesem FU ansteuern will, muss man darauf achten, das der Strom nicht zu gross wird. Ein Sensorcontroller schaltet die Wicklung um, indem er den Sensoren folgt, ein grösserer Strom dreht dabei den Motor schneller. Ein FU regelt das in einem festen Verhätnis von Spannung zu Frequenz, was für BLDC nicht gut geeignet ist.
Angehängte Dateien:
-

IMG-20210515-WA0000.jpg
180 KB
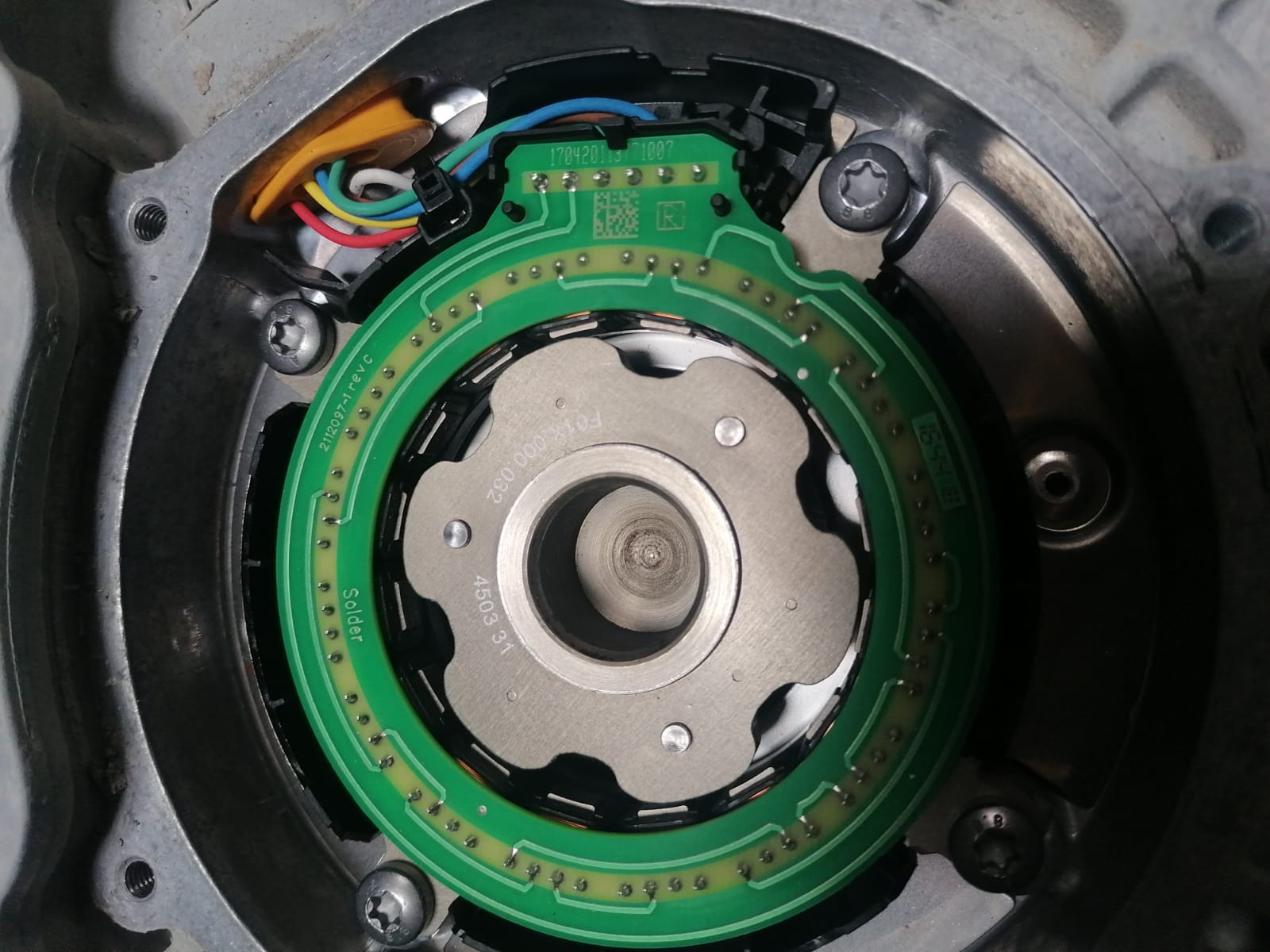
Hallo Matthias, vielen Dank für deine schnelle Antwort. In der Tat verfügt der Motor über Sensoren (siehe Bild). Ich gehe davon aus, dass es sich hierbei um Hallgeber handelt. So scheinst du damit recht zu haben. Jedoch sind es, wenn ich mich nicht verzählt habe, 16 Stück. Dass ist nicht durch 3 teilbar, daher wird das Auslesen wieder sehr speziell oder ich muss diese durch eigene ersetzen, was auch wieder nicht leicht ist, da der Winkel ja stimmen muss. Da ich den Motor jedoch nicht regeln, sondern nur steuern wollte hoffte ich, dass es mit einem Drehfeld für normal Drehstromasynchronmotoren auch geht. der Motor wird übrigens mit einer Spannung von ca. 400V betrieben und wird mit einer Leistung von 47kW angegeben. Daher habe ich auch nach einer Schaltung gesucht, bei der Die MOSFETs oder IGBTs auch außenliegend und leicht gegen größere zu tauschen sind.
Marvin T. schrieb: > Jedoch sind es, > wenn ich mich nicht verzählt habe, 16 Stück. Wieviele Anschlüsse kommen denn für die Sensoren aus dem Motor raus? Üblich sind 5 Drähte für 3 Sensoren und 8 Drähte für 6 Sensoren. Wenn es ein spezieller Motor ist, brauchst du eben auch einen speziellen Controller. Ohne Sensoren ist es so gut wie unmöglich, den Motor mit vernünftigem Drehmoment anzufahren und zu betreiben. Gut geeignet ist zur Selbstanpassung das Projekt aus AVR447, einer Appnote von Atmel/Microchip zur Sinusansteuerung von BLDC mit Sensoren: https://www.microchip.com/wwwAppNotes/AppNotes.aspx?appnote=en591447 Der Grossteil deiner derzeitigen Hardware ist weiterverwendbar, denn mein FU ist sozusagen ein Spinnoff dieser Appnote. Die Sensoren resynchronisieren den Ponter in die Tabelle - aber das steht alles in den Notes.
Matthias S. schrieb: > Wieviele Anschlüsse kommen denn für die Sensoren aus dem Motor raus? Insgesamt 6. scheinbar handelt es sich um einen Array an Spulen, welche zusammen irgendwie zurückmelden wie der Motor steht. Ich werde die Tage mal ein Oszilloskop dranhalten und schauen was passiert, wenn ich drehe und ob es in einem erkennbaren Zusammenhang mit den Sinuskurven des Motors steht. Ich möchte mich nochmal für deine Hilfe bedanke. Ich habe mir die AppNote angesehen und muss leider zugeben, dass dies mein Wissen momentan noch etwas übersteigt und es wohl noch einige Zeit dauern wird, bis ich das für einen 328P funktionierend kompiliert bekomme. Ich habe mich daher etwas umgeschaut und bei Mouser diesen Chip gefunden: https://www.mouser.de/ProductDetail/Texas-Instruments/UCC2626PWG4?qs=eJkN62t4xTVYX2WmK6NrjQ==&mgh=1&vip=1&gclid=Cj0KCQjw16KFBhCgARIsALB0g8KhsYobRQDgokWWmPJpyrXfuxa7x8KiECcu80lPDAO7WISFdYcEa6waApQVEALw_wcB Der sollte machen was ich brauche und kann auch mit den IR2110 arbeiten, so kann ich einen großen Teil deiner Schaltung übernehmen und den Chip mit einem Arduino und einem DAC ansteuern.
Marvin T. schrieb: > Der sollte machen was ich brauche Das wissen wir noch nicht. Denn auch dieser Chip benötigt drei Hallsensoren, um die 6 Sektoren des Motors zu detektieren. Du solltest also mal einen Oszi daran hängen und den Motor händisch drehen. Wenn die Sensoren Speisung benötigen, wirst du da nix sehen. Dann muss erstmal geklärt werden, wie die Versorgung funktioniert. Das ist übrigens, wie du schon gemerkt hast, kein einfacher Spass. Mir sind schon bei unseren 4kW/48V Radnabenmotoren des öfteren die Endstufen explodiert. Also obacht und erstmal mit geringer Spannung testen. Der Motor sollte auch mit 40-50V schon willig drehen. Gut geeignet als MC sind übrigens die XMega wegen der AWEX Einheit oder die STM32 mit Advanced Timer. Ich habe damals AVR447 mit reichlich Konsolenunterstützung (Messwerte und Debug) auch auf diese MC portiert.
Matthias S. schrieb: > Das wissen wir noch nicht. Denn auch dieser Chip benötigt drei > Hallsensoren, um die 6 Sektoren des Motors zu detektieren. Ja, das ist technisch korrekt, da habe ich mich etwas unklar ausgedrückt. Mittlerweile habe ich einige Stunden Recherche hinter mir und bin auf folgende Lösung gekommen. Ich werde die eingebauten Sensoren entfernen und 12 Magneten auf dem Metall oben anbringen. Dazu werde ich erstmal einen Adapter mit dem 3D-Drucker drucken (als Prototyp), in welchem ich diese in gleichmäßigen Abstand einlassen kann. Dann werde ich drei Hallsensoren anhand von Oszilloskope Bildern so ausrichten, dass die beim händischen Drehen des Motors induzierten Wellen mit den Schaltstellen der Hallsensoren wie in der vom Hersteller des Drivers mitgelieferten Grafik übereinstimmen. Anschließend werde ich mit einem Labornetzteil langsam Strom und Spannung erhöhen, und schauen, ob es funktioniert. Außerdem habe ich auch die eingebauten Sensoren gemessen. Leider ohne Erfolg. Ich gehe daher davon aus, dass Spannung in die Spulen induziert wird und der Strom sich durch die Induktivität beim Vorbeidrehen des Innenteils verändert. Sollte es so sein, sehe ich für mich leider keine Möglichkeit diese auszulesen. Da dies momentan auch meine einzige Theorie ist, sehe ich momentan generell keine Möglichkeit diese auszulesen.
Marvin T. schrieb: > Außerdem habe ich auch die eingebauten Sensoren gemessen. Leider ohne > Erfolg. Hallsensoren benötigen eine Speisespannung, sonst passiert da gar nix.
Hier bitte ich um Hilfe zum 3-Phasen Frequenzumrichter mit AVR Die gesamte Schaltung ist übersichtlich und vermutlich leicht nachzubauen. Ich beschäftige mich jedoch seit geraumer Zeit mit den Microcontrollern. Um die Programme in Diese zu laden habe ich mir das Board von aTeVaL 2.0 gekauft. Das Board funktioniert einwandfrei und ich habe damit auch schon fertige Programme auf den z.B. ATMEGA328P geladen (einfache Blinkprogramme). Leider bekomme ich das Programm , 3-Phasen Frequenzumrichter, nicht geladen, es kommen folgende Fehlermeldungen recipe for target'main.o'failed vfd.h:No such file or directory Als Sofware verwende ich Atmel Studio 7 Der dargestellte Fehler liegt sicherlich an mir da ich mich mit der Software noch nicht so gut auskenne,aber vielleicht kann mir da mal jemand unkompliziert weiterhelfen. Sollte es allerdings zu kompliziert werden lege ich das Projekt erst einmal in die Schublade. Ich bedanke mich dennoch im Voraus für eine Hilfestellung.
Angehängte Dateien:
-

Clipboard01.jpg
21 KB
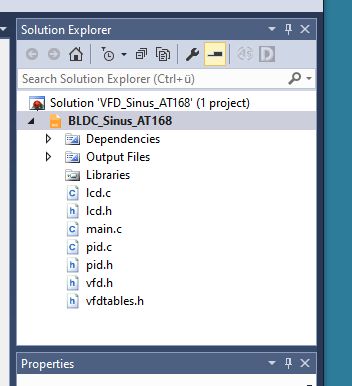
Am einfachsten ist es, das Projekt zu importieren, denn es war ein AVR Studio 4 Projekt. Import findest du unter File-> Import...-> AVR Studio 4 Project. Vorasugesetzt, alle Dateien liegen im gleichen Ordner, suchst du im folgenden Dateidialog das *.aps für das Projekt. Stelle in den Properties (Project -> 'VFD_Sinus_ATnnn Properties') in Device den richtigen MC für dein Projekt ein (bei dir ATMega328). Drücke F7 um das Projekt zu bauen. Der Solution Explorer sollte etwa so aussehen, wie im angehängten Bild. Einfacher ist es, die passende HEX Datei für deinen MC aus den HEX Dateien rauszufischen und die auf deinen MC zu flashen.
Hallo Matthias, vielen Dank für die schnelle Antwort, ich werde mich am Wochenende damit beschäftigen und hoffe doch das ich es hinbekomme,werde auf jeden Fall schreiben ob es geklappt hatt nochmals danke
Hallo Matthias,
Vielen Dank für Ihr Projekt. Ich habe ein paar Fragen zum
SpeedController-Verfahren.
Erste Frage: Den anderen Einträgen nach zu urteilen, darf der Inco-Wert
255 nicht überschreiten. Aber
gemäß dieser Zeile aus main.c:
OutputValue += PID_Controller(incrementSetpoint,
((uint16_t)Inco),(pidData_t *) &pidParameters);
Inco = (uint16_t)outputValue;
und dieses von pid.c:
int16_t PID_Controller(int16_t setPoint, int16_t processValue, pidData_t
*pid_st)
{
...
if(ret > MAX_INT) // MAX_INT = 32767
{
ret = MAX_INT;
}
sonst if(ret < -MAX_INT)
{
ret = -MAX_INT;
}
return((int16_t)ret);
}
Der Inco-Wert kann viel kleiner als 0 und viel mehr als 255 sein.
Aufgrund des oben Gesagten kann ich nicht verstehen, wie das
funktioniert? Es ist klar, dass wir den AmplitudeValue weiter auf 2550
begrenzen, aber warum Werte auf Inco 16bit anwenden, die nicht größer
als 8bit sein sollten, ist unklar.
Zweite Frage: Warum teilen wir amplitudeValue durch 10? Wenn dadurch
Gleitkommawerte vermieden werden sollen, erhalten wir sie bei der
Division durch zehn immer noch.
Ich wäre Ihnen SEHR dankbar, wenn Sie antworten. Danke schön.
Spimash schrieb: > Der Inco-Wert kann viel kleiner als 0 und viel mehr als 255 sein. > Aufgrund des oben Gesagten kann ich nicht verstehen, wie das > funktioniert? Die Werte werden bei den Extremen geklemmt auf 0 bzw. 255, zur Skalierung passend und auch zur Vermeidung von Race Conditions. Die PID Routine ist aus einer anderen AVR AppNote (AVR221) und ist so mit 16 Bit übernommen worden. Spimash schrieb: > erhalten wir sie bei der > Division durch zehn immer noch. Werden aber wieder auf int gecastet.
Vielen Dank für die schnelle Antwort! Bei der externen Steuerung wird die SpeedController-Prozedur aufgerufen. Die für die Steuerung über das Display vorgegebenen Einschränkungen zur Inco-Änderung gelten daher bei diesem Verfahren nicht. Wo beschränkt sich Inco? Schließlich: OutputValue += PID_Controller(incrementSetpoint, ((uint16_t)Inco),(pidData_t *) &pidParameters); Inco = (uint16_t)outputValue; In der ersten Zeile weisen wir Inco 16bit zu und in der zweiten ebenfalls.
Spimash schrieb: > In der ersten Zeile weisen wir Inco 16bit zu und in der zweiten > ebenfalls. Und wenn du ein Stückchen weiter liest, kommt da die clamp Routine, die die Werte runterskaliert. Übrigens kann es gut sein, das du da Probleme entdeckst. Die PID Sache ist nicht besonders gut getestet und es kann gut sein, das da was faul ist. Aber da kannst du jetzt ja selber Hand anlegen.
Ja, ja, ich habe weitergelesen. Es gibt eine Einschränkung, aber nicht Inco, sondern Amplitude. Ich dachte, dass es vielleicht irgendwo eine direkte Einschränkung der Inco-Variablen oder eine umgekehrte Konvertierung auf 8 Bit gab. Nochmals vielen Dank für die Antworten, es ist etwas klarer geworden. Muchas gracias, Amigo!
Nochmals viele Grüße, Matthias!
Ich bin fast fertig mit dem Lesen des Codes, also bin ich bald hinter
Ihnen.) Ich stecke bei der Skalierung fest. Ich verstehe nicht, was du
meintest.
Hier ist diese Zeile:
#ifdef PURE_SINE_DRIVE
tempU = 128 - ((uint16_t)(amplitude * tempU) >> 9);
tempV = 128 - ((uint16_t)(amplitude * tempV) >> 9);
tempW = 128 - ((uint16_t)(amplitude * tempW) >> 9);
Im Wesentlichen wird hier beschrieben, dass der Maximalwert nun nicht
256, sondern 128 beträgt. Warum wird das gemacht? Warum kann ich es
nicht bei 256 belassen?
Für den Hinweis wäre ich dankbar.
Spimash schrieb: > Warum kann ich es > nicht bei 256 belassen? Weil die Sinuskurve symmetrisch zur virtuellen Nullinie sein soll. Das steht aber auch im Kommentar 2 Zeilen dadrüber: /* Scale sine modulation values to the current amplitude. * Pure sine drive needs to be symmetrical to zero * Motor drive doesn't */
Für mich wird es mit oder ohne Skalierung symmetrisch in Bezug auf den virtuellen Nullpunkt sein. Der einzige Unterschied besteht darin, dass in der Tabelle die Werte von 0 bis 255 und nach der Skalierung von 0 bis 128 reichen. Und genau das verstehe ich nicht, warum das gemacht wird. Welche schlimmen Dinge werden ohne Skalierung passieren?
Spimash schrieb: > Welche schlimmen Dinge werden ohne Skalierung passieren? Die Ausgangsamplitude wird geclippt oder nicht voll ausgenutzt. Meine Empfehlung - lass es einfach so, wie es ist.
Angehängte Dateien:
-

PWM_128.png
13 KB -

PWM_256.png
14 KB
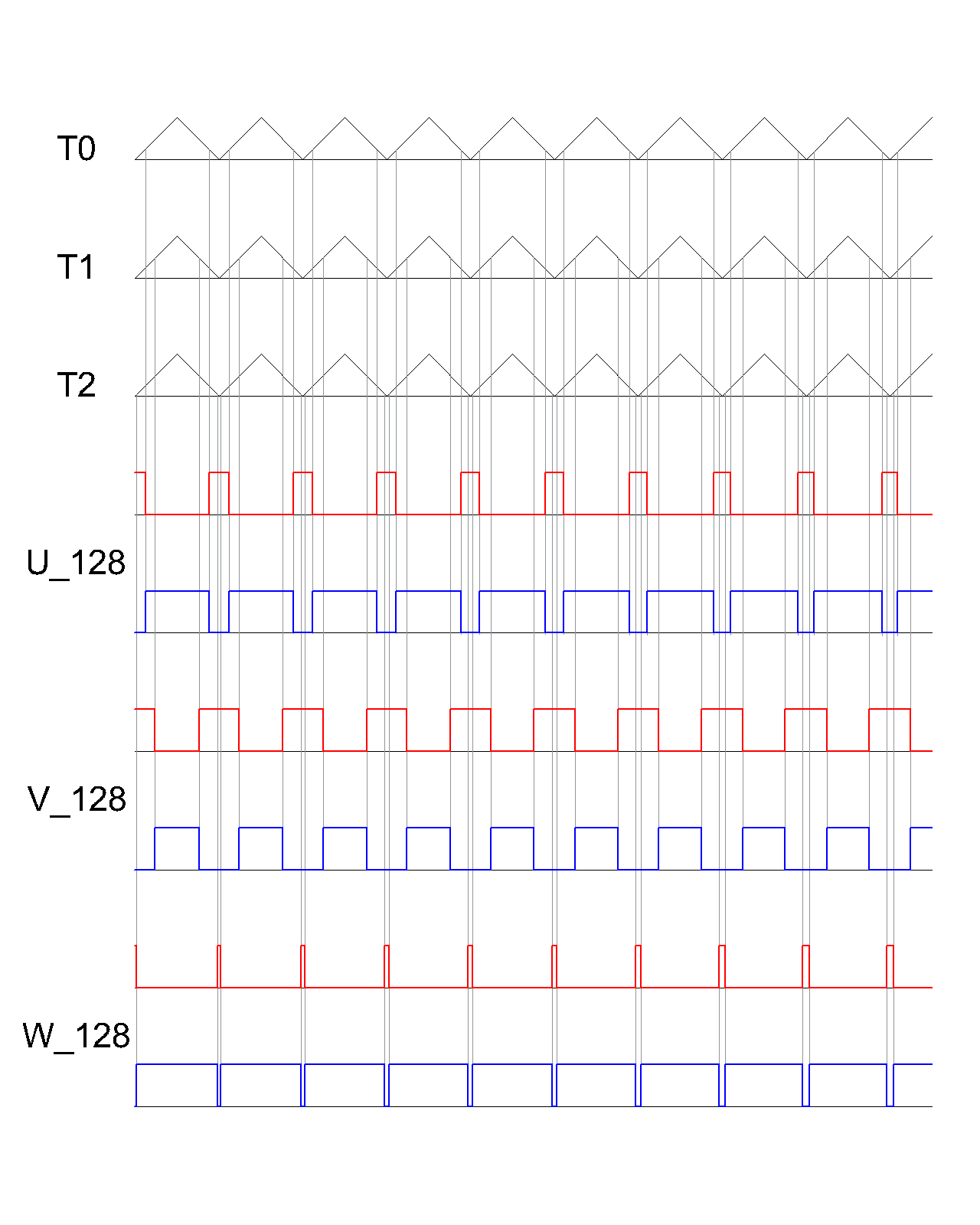
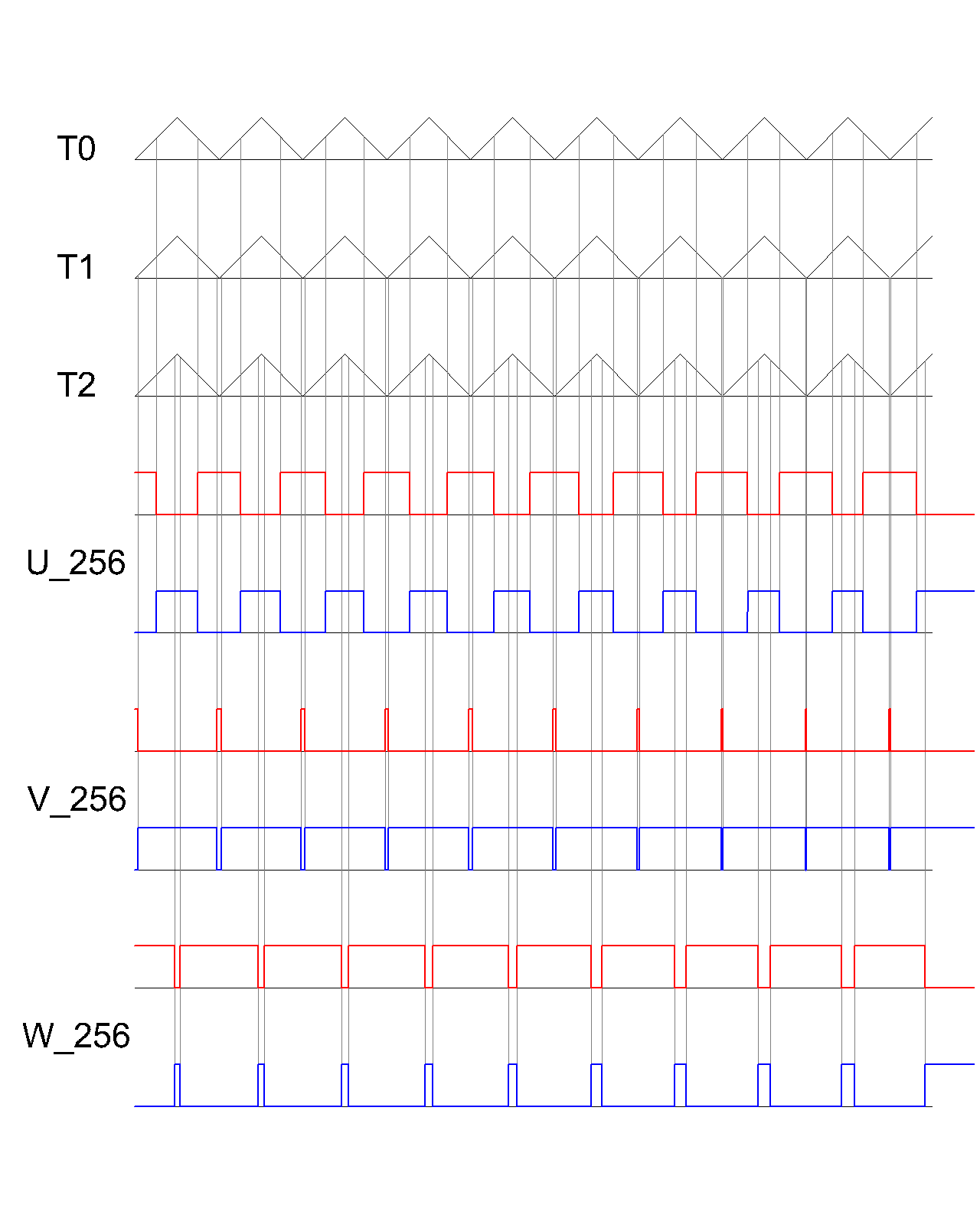
Danke für die Empfehlung, aber ich möchte herausfinden, wie es funktioniert. Ich habe die ersten zehn Werte für drei Phasen ohne „Totzeit“ mit Skalierung (PWM_128) und ohne Skalierung (PWM_256) aufgetragen. Meiner Meinung nach ändert sich hier einfach der Maximalwert des Timers. Verstehe ich die Arbeit der oberen und unteren Schultern insgesamt richtig?
Spimash schrieb: > Verstehe ich die Arbeit der oberen und unteren Schultern insgesamt > richtig? Was meinst du mit Schulter? Setze doch einfach mal ein paar Werte in die Skalierung ein:
1 | #ifdef PURE_SINE_DRIVE
|
2 | tempU = 128 - ((uint16_t)(amplitude * tempU) >> 9); |
3 | tempV = 128 - ((uint16_t)(amplitude * tempV) >> 9); |
4 | tempW = 128 - ((uint16_t)(amplitude * tempW) >> 9); |
5 | #else
|
6 | tempU = ((uint16_t)(amplitude * tempU) >> 8); |
7 | tempV = ((uint16_t)(amplitude * tempV) >> 8); |
8 | tempW = ((uint16_t)(amplitude * tempW) >> 8); |
9 | #endif
|
Vllt. wirds dann klarer. Spimash schrieb: > Meiner > Meinung nach ändert sich hier einfach der Maximalwert des Timers. Nein. Die Timer zählen immer bis 255 und werden während des gesamten Betriebs nicht geändert. Es werden nur die OCR Register der 3 Timer geändert.
Ein letzter Versuch und ich gehe. Die Frage betrifft nur PURE_SINE_DRIVE. Warum kann man es nicht so schreiben: tempU = 256 - ((uint16_t)(amplitude * tempU) >> 8); Es kommt alles gleich, nur beträgt der maximale OCR-Wert für jeden Timer nicht 128, sondern 256. Matthias S. schrieb: > Was meinst du mit Schulter? Die oberen und unteren Arme sind die oberen und unteren Halbbrücken. Matthias S. schrieb: > Setze doch einfach mal ein paar Werte in die > Skalierung ein: Ja, das habe ich getan. Und ich habe zwei Diagramme angehängt: PWM_256 sind nur die Werte aus der Sinustabelle und PWM_128 ist mit Skalierung. Ich verstehe es immer noch nicht) Matthias S. schrieb: > Nein. Die Timer zählen immer bis 255 und werden während des gesamten > Betriebs nicht geändert. Es werden nur die OCR Register der 3 Timer > geändert. Das wollte ich schreiben. Ich habe die falsche Terminologie gewählt.
Spimash schrieb: > sondern 256 256 ist ein Überlauf und passt nicht in ein 8-Bit OCR Register, da es 9 Bit lang wäre.
Matthias S. schrieb: > 256 ist ein Überlauf und passt nicht in ein 8-Bit OCR Register, da es 9 > Bit lang wäre. Ok, ich stimme zu. So: tempU = 255 - ((uint16_t)(amplitude * tempU) >> 8);
Oder du kannst: tempU = ((uint16_t)(amplitude * tempU) >> 8); Dasselbe wie in „else“
Spimash schrieb: > Oder du kannst Probiers einfach aus. Zum Messen, wie gesagt, am besten einen Tiefpass zum Filtern der PWM Frequenz, um die resultierenden Wellenformen besser am Oszi zu sehen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.