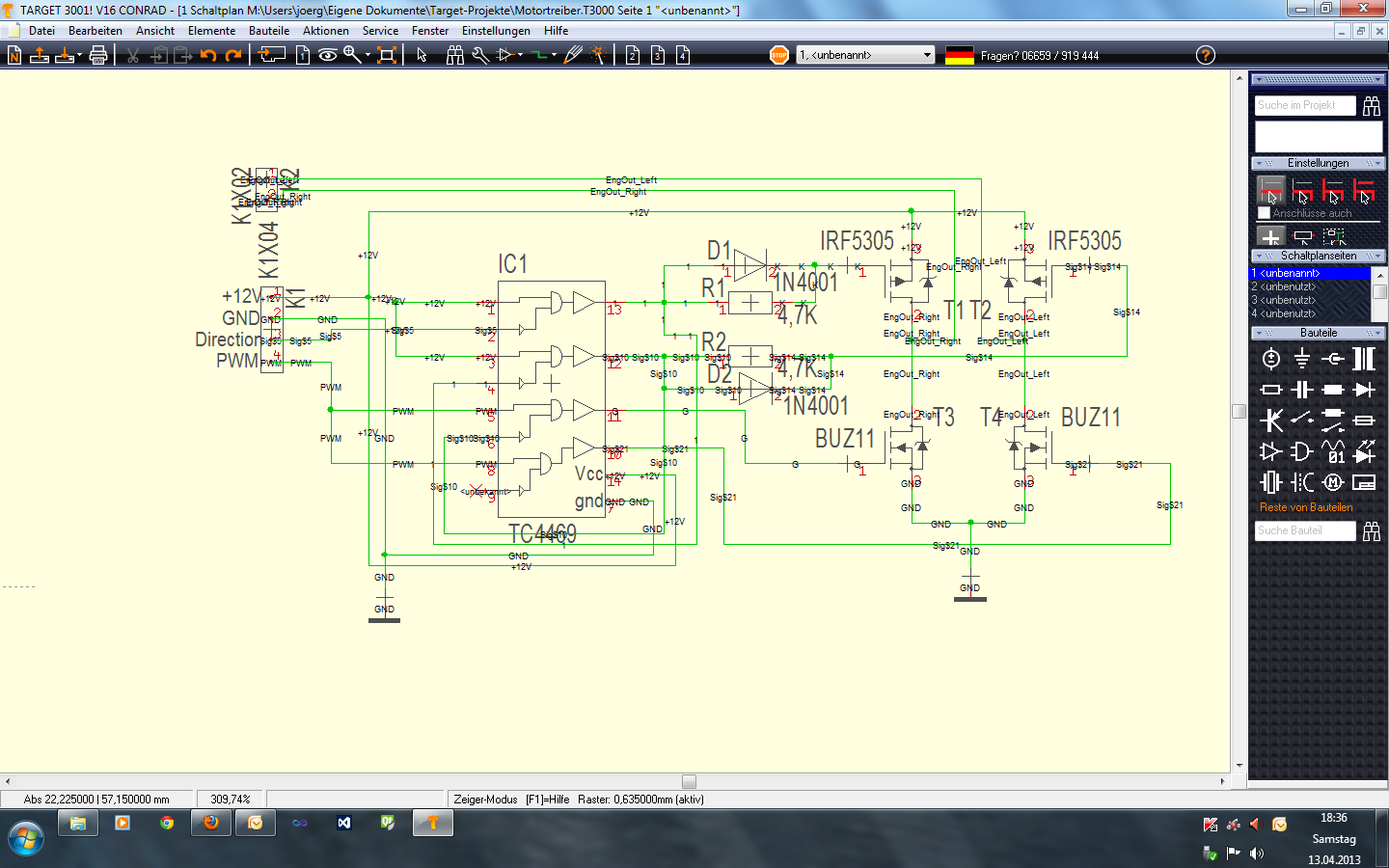
Hallo, liebe Gemeinde, auf Basis der C-ControlPro128 habe ich ein Autopilot-System für ein Schiff entwickelt, welches von einer GPS-Plotter-Software mit NMEA0183-Daten versorgt wird und daraus Ruderausschläge berechnet. Die Software habe ich in diversen Simulations-Umgebungen bereits getestet, sie tut, was sie tun soll... Was auch kein Problem darstellt ist die Beschaltung des µC, was RS232, Speicher, Keyboard und Display betrifft; der sehr guten Dokumentation sei Dank! Wo ich aber vermutlich gerade - erwartungsgemäß - scheitere, ist die Schaltung der Motorsteuerung hinter dem µC... Software kann ich; bei Hardware tue ich mich ein bisschen schwer... :( (Obwohl ich beides nur hobby-mäßig betreibe...) Ich beabsichtige, einen Motor mit Schneckengetriebe und kurzer Untersetzung zu verwenden, der bei 12V ca. 20A Betriebs-Strom zieht. Durch die Software wird er langsam angefahren und je nach zurückzulegendem Weg des Ruders auf Drehzahl gebracht und vor Erreichen des Endpunktes sanft gebremst; dadurch sollte sich sowohl der Anlauf- als auch der Leerlauf-Strom des Motors regulieren lassen. Nach intensivem Googlen bin ich auf den Motortreiber TC4469 gekommen, der seinem Datenblatt zufolge nur mit vier MOSFET's beschaltet werden muss, um diese Aufgabe zu bewältigen: zwei P- und zwei N-Kanal-FET's. Daraus ersann ich anhängende Schaltung, die nur dann Sinn macht, wenn ich die Typisierungen von MOSFET's richtig verstanden habe; und dessen bin ich mir absolut nicht sicher... Kann mir jemand zu dieser Schaltung einen Tipp geben? Wie gesagt, ich habe Elektronik nie gelernt, versuche mich gerade autodidaktisch in das Thema zu vertiefen, habe aber noch gewaltige Lücken... Viele Grüße Jörg Pauly
Angehängte Dateien:
-

Motortreiber.png
200 KB
Hallo, zusammen, ich drück den mal hoch, bevor er untergeht... Gruß Jörg
Wieso benutzt du für diesen Zweck kein Servo? Die kann man doch recht einfach ansteuern. Um die Ruderstellung festzustellen kannst du dann ja noch eine Lichtschranke verbasteln und Impulse zählen.
Oh, anscheinend geht es um ein richtiges, echtes, großes Boot? Dann ist mein Kommentar quatsch.
hins schrieb: > Oh, anscheinend geht es um ein richtiges, echtes, großes Boot? Dann ist > mein Kommentar quatsch. Ja, eins zum Reinsetzen und sogar drauf schlafen... ;) Die Ruderstellung wird über einen Hallsensor an den µC gemeldet; das ist auch alles nicht das Problem. Das Ruder misst ca. 1,2m³, da muss schon etwas Kraft ran, um das zu stellen.
> ein Autopilot-System für ein > Schiff entwickelt, welches von einer GPS-Plotter-Software mit > NMEA0183-Daten versorgt wird und daraus Ruderausschläge berechnet. > Das Ruder misst ca. 1,2m³ Du meinst sicher 1,2qm. Das klingt nach einer ca. 12...15m Jacht und nach einer Atlantiküberquerung, bei der man auch mal schlafen will. Dann aber nicht mit der Schaltung. Warum willst du die High-Side-Mosfets so langsam einschalten (4K7)? Sollen die abbrennen? Um das gleichzeitige Einschalten von High- und Low-Side-Mosfet zu verhindern nimmt man passende Mosfettreiber mit eingebauter Totzeit oder lässt solche Signale vom µC (natürlich + Treiber) erzeugen. Und bitte zeig in Zukunft Schaltungen ohne die unsinnigen Bezeichner, so tun einem die Augen weh und man kann einige wichtige Dinge nicht erkennen.
1N400x sind lahme 50Hz-Dioden und nicht für schnelle PWMs geeignet. 4,7k Gate-Widerstand - Hä ? Nimm richtige Halb- oder Vollbrücken. Ich würde evtl. 4 N-Channel-MOSFETs nehmen und einen IRF-Halbbrückentreiber (notfalls mit eingebauter Totzeit und einfachem IN- und EN-Eingang). Das reicht eigentlich, um einen Motor anzusteuern. Ich habe da z.B. einen uC gewählt und dann einen Treiber IR2302 und die Mosfets SUD50N04.
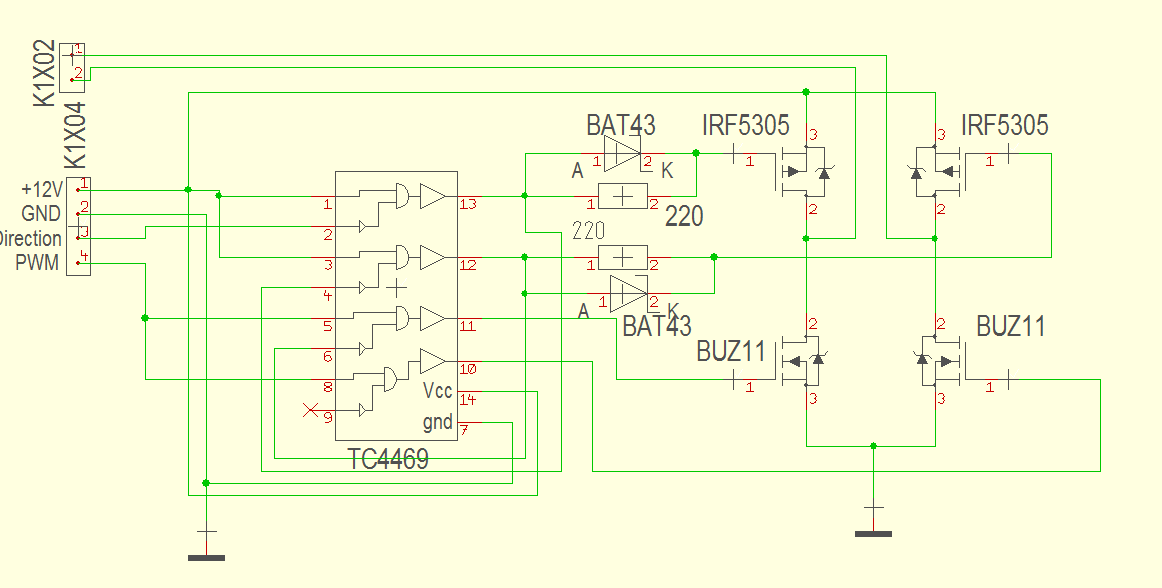
@ArnoR: O.T.: Nicht ganz, unsere "Voyager" ist ~8m lang, aber 1968 in Amsterdam u.a. zum Einsatz auf den Grachten gebaut. Da verbaute man diese monströsen Ruderflächen, um dem Schiff eine schnellstmögliche Reaktion auf Ausschläge zu ermögliche; was nicht nur in den engen Grachten von Vorteil ist. Dadurch ist sie manöverierbar, wie man es sonst nur von zweimotorigen Schiffen mit Bugstrahler kennt. Wir wollen auch nicht über den Atlantik, dafür reicht schon die Bunker-Kapazität nicht aus. Das Ganze ist mehr eine Spielerei, eine Herausforderung, die ich mir selbst gestellt habe. :) Die 4k7 habe ich - offen gestanden - aus dem Bauch heraus geschätzt. Das Datenblatt des TC4469 gibt diese Schaltung als "Application Sample" vor, ohne sich aber über die Dioden oder die Widerstände auszulassen; was ja sicherlich auch von den MOSFET's und der verwendetetn Spannung abhängt. TARGET verlangt aber Bauteilnamen, also habe zunächst mal die genommen, die mir geläufig bzw. in meinem Bauteileschrank vorhanden sind... Als Dioden habe ich jetzt den Schottky-Typ BAT42 gegoogelt, der dem Datenblatt nach die angestrebten 10kHz sowie bis zu 20V locker mitmacht. Wie ich die Musterschaltung des Datenblattes lese, sollen die Widerstände, die parallel zu diesen Dioden vor dem Gate der HighSide-FETs liegen, doch einen eventuellen Rückstrom vom FET-Gate zum Motortreiber, also dem 4469 begrenzen, oder irre ich mich? Wie gesagt, ich betrete hier Neuland, bin also für jede Hilfe sehr dankbar. Viele Grüße Jörg
> Wie ich die Musterschaltung des Datenblattes lese, sollen die > Widerstände, die parallel zu diesen Dioden vor dem Gate der > HighSide-FETs liegen, doch einen eventuellen Rückstrom vom FET-Gate zum > Motortreiber, also dem 4469 begrenzen, oder irre ich mich? Die sollen verhindern, dass beim Umschalten der Drehrichtung kurzzeitig beide p-Mosfets eingeschaltet sind, indem der Eingeschaltete über die Diode schnell ausgeschaltet wird und der Einzuschaltende über den Widerstand langsam eingeschaltet wird. Ein Wert von 220 Ohm ergibt eine Einschaltzeit von 1µs und sollte passen.
Angehängte Dateien:
-

Motortreiber.png
13 KB
Hallo, Arno, ArnoR schrieb: > Die sollen verhindern, dass beim Umschalten der Drehrichtung kurzzeitig > beide p-Mosfets eingeschaltet sind, indem der Eingeschaltete über die > Diode schnell ausgeschaltet wird und der Einzuschaltende über den > Widerstand langsam eingeschaltet wird. Ein Wert von 220 Ohm ergibt eine > Einschaltzeit von 1µs und sollte passen. dazu muss ich mal die "Blöde Frage der Woche" loswerden: Die Diode weist in Durchlassrichtung vom Motortreiber zum Gate, also ist doch der Widerstand für das Einschalten eines HiSide-MOSFETS damit überbrückt??? Ratlose Grüße Jörg
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.