Hallo,
ich habe momentan einen mächtigen Black Out und benötige Hilfe bei der
Realisierung des Mikroschrittbetriebs mit einem L6208.
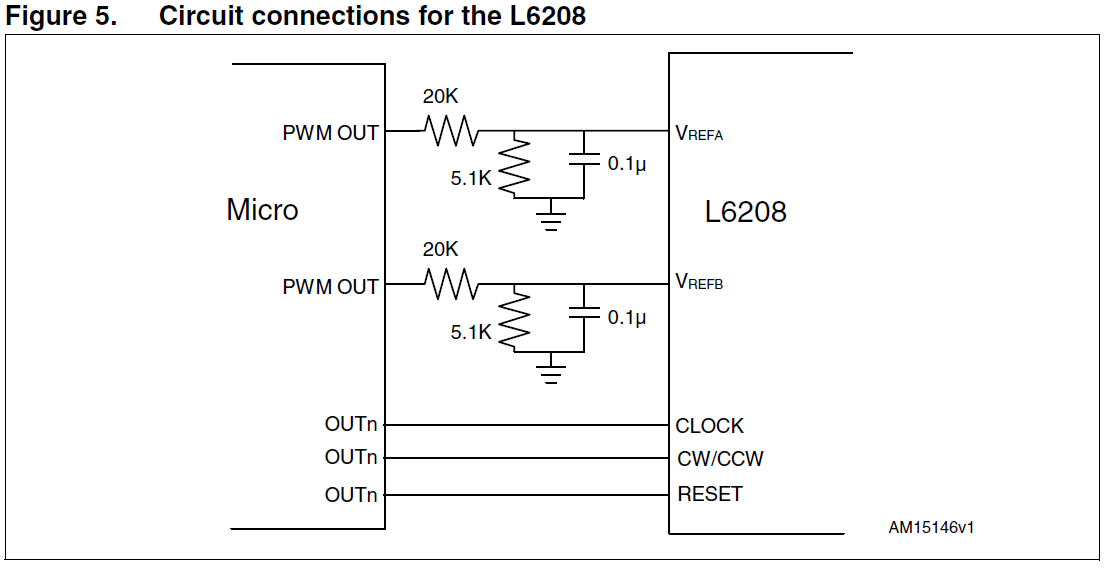
Ich habe die Schaltung entsprechend des L6208 Datenblatts aufgebaut und
die VRef Anschlüsse mit der PWM-Beschaltung versehen (die aus der AN
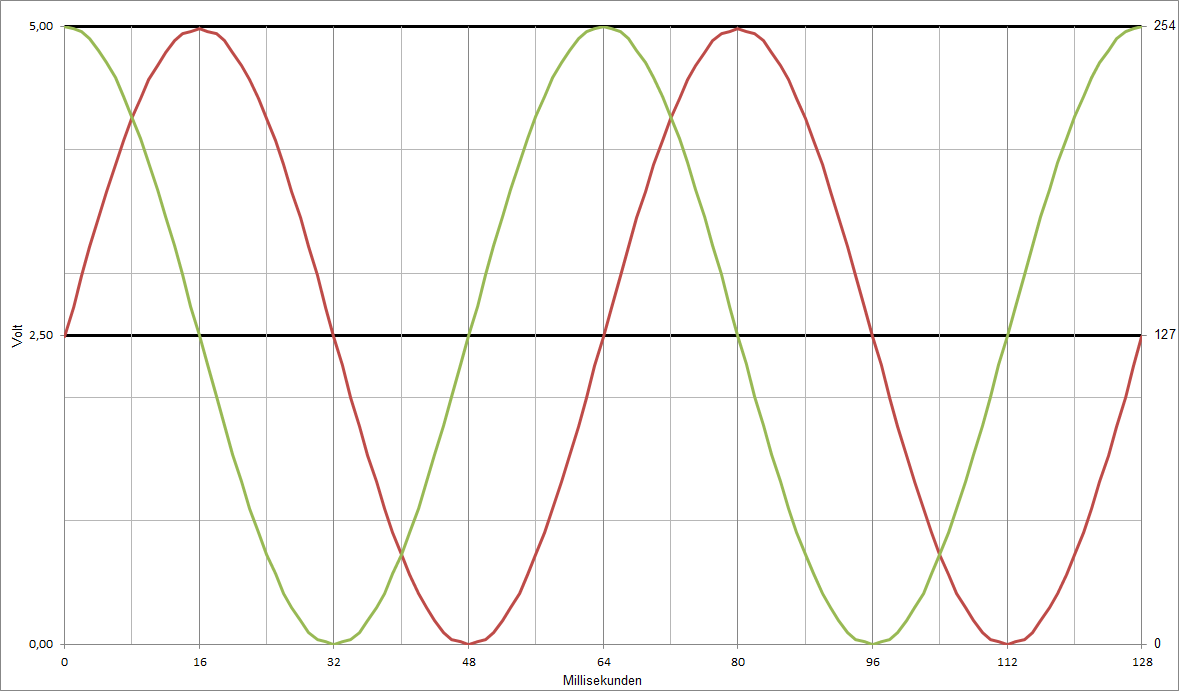
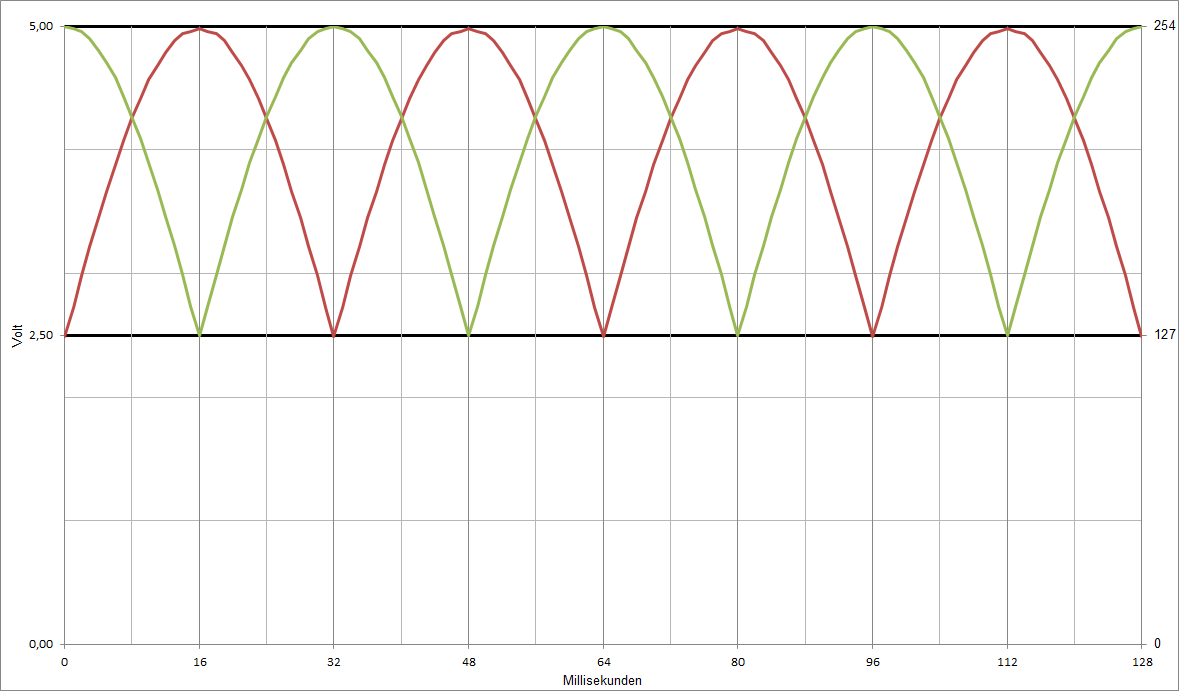
1495 Microstepping, siehe Bild). Dann habe ich ein Programm geschrieben,
dass ein Sinussignal ausgibt. Der Verlauf habe ich ebenfalls als Bild
angehängt. Ein Clock-Signal (High) kommt immer dann, wenn einer der
beiden Kurven sein Maximal oder Minimum erreicht.
Das Ergebnis ist ein ruckelnder, tanzender und pfeifender Schrittmotor
(der ist laut DB mikroschritttauglich). Von einem schönen, leisen
Mikroschrittbetrieb ist das ganz weit entfernt!
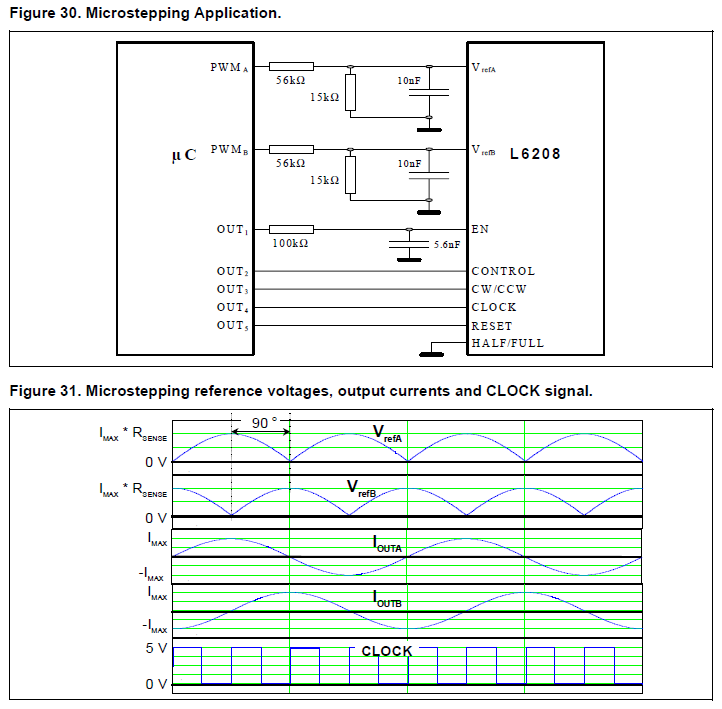
Zufälligerweise habe ich jetzt mal in die AN 1451 (da wird erklärt wie
eine Schaltung für V/H-Schrittbetrieb aussieht) angeschaut. Dort wird
auch kurz das Thema Mikroschritt angesprochen. Dort wird die gleiche
PWM-Beschaltung, jedoch mit ganz anderen Bauteilwerten, verwendet (Siehe
Bild 3).
Außerdem fand ich eine Formel für die Berechnung für VrefA, was wohl das
PWM-Signal für den VrefA-Eingang sein soll. Dort steht Imax x Rsense =
VrefA. In meinem Fall wäre dies 1A x 0,25Ohm = 0,25V.
Meine Frage ist daher, ob mein PWM Signal von bis zu 5V nicht viel zu
hoch ist? Und welcher der beiden PWM-Beschaltung richtig ist? Oder
benötige ich ganz andere Bauteilwerte für meine Zwecke?
Ich freue mich über jede Hilfe, da ich echt feststecke und nicht mehr
weiter weiß.
Ach ja, erschwerend kommt hinzu, dass ich kein Oszilloskop besitze. Das
macht es nicht gerade leichter - ich weiß :(
PS: Ich hänge mal meinen bisherigen Code dran (ich hoffe, das klappt),
das macht es vielleicht einfache mein Problem zu finden.
Hallo Timo,
hast Du Dir schonmal den Allegro A4988 angesehen? Der unterstützt out of
the box bis zu 16-fach Mikroschritte. Müsste ich mich entscheiden, dann
würde meine Wahl auf den Allegro fallen. Für alle die, die noch nicht
auf SMD umgestiegen sind, gibt es den Allegro auch auf Modulen zu
kaufen. Im Preis unterscheidet es sich kaum, denn der Preis für den 6208
ist aus meiner Sicht an der Schmerzgrenze. Für den kleinen Aufpreis muss
man sich nicht mehr um die Mikroschritte kümmern. Für akademische Zwecke
ist der 6208 aber sicherlich die richtige Wahl ;-)
Gruß
Also mit der PWM stellst du ja den Strom ein, bei der die Endstufe
choppt / abschaltet.
Für mein Verständnis müsstest du nur einen Sinushälfte erzeugen, die
"negative" Hälfte wird ja durch Umpolen der Wcklung durch die interne
Brücke erzeugt.
Zur Höhe des PWM-Signals: Du musst den Spannungsteiler dementsprechend
anpassen, dass die maximal benötigte Vref bei 100% Duty erreicht wird.
Bei dir also:
1A x 0,25Ohm = 0,25V Dann musst du mit dem Spannungsteiler von 5V auf
0,25V kommen, also ein Teiler von 20 -> 19k und 1k z.B.
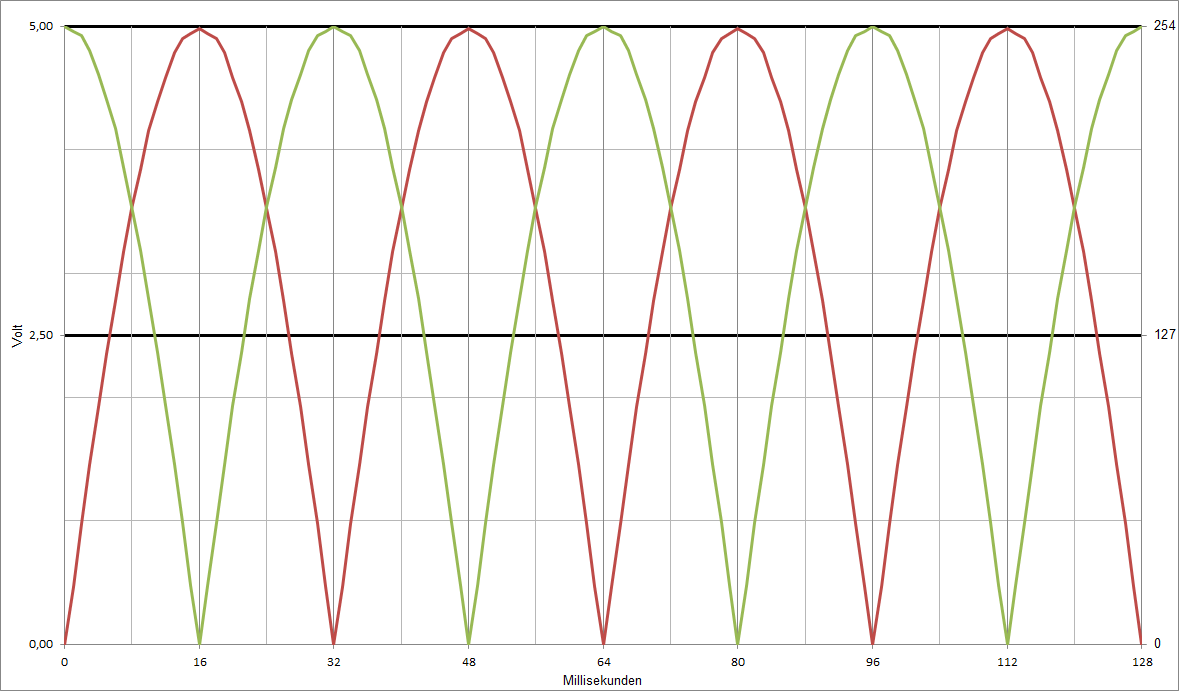
@Floh: Erstmal Danke für die Informationen. Ich habe mal zwei
Halbwellen"modelle" angehängt. Beide habe ich umgerechnet und in mein
Programm eingefügt. Mit beiden läuft der Motor, er scheint aber
Vollschritte zu machen. Zumindest konnte ich für eine Viertelumdrehung
50 Schritte zählen. Der Motor macht 1,8° pro Vollschritt. Das wären 200
pro Umdrehung und 50 für eine Viertel-Umdrehung.
Oder war das anders gemeint?
@Nope: Danke für den Hinweis, das scheint ein echt interessantes Bauteil
zu sein. Ich habe aber extra den L6208 ausgewählt und möchte mich auch
ganz bewusst mit dieser verdammten PWM-generierten
Mikroschritt-Problematik auseinandersetzen. Wenn das mal laufen sollte,
dann werde ich mich an diesen kleinen Kerl wagen. Allein die
Grundschaltung sieht sehr simpel aus!
Timo schrieb:> Ein Clock-Signal (High) kommt immer dann, wenn einer der> beiden Kurven sein Maximal oder Minimum erreicht.
Im Mikroschrittbetrieb soll jede Wicklung einen sinusförmigen Strom
bekommen. Der L6208 sorgt nur für Stromregelung und
Polaritätsumschaltung. Damit das kein lautes Geklapper gibt, muß die
Polarität der jeweiligen Phase immer im Nulldurchgang umgeschaltet
werden, d.h. der L6208 muß im Normal Drive Mode (Two Phase On) laufen
und seinen Clock zum Umpolen immer bei Sin=0 bekommen. Aus dem
Sinusgenerator müssen die positiven, 90° phasenverschobenen Halbwellen
kommen, weil der Stepper-Controller nur mit pos. Referenz arbeitet und
das Umpolen über die H-Brücke erfolgt.
s.a. 5.4 (S.8) in
http://www.deltron.ch/pdf/produkte/motoren/schrittmotor_kurz_erklaert_d.pdf
Der L6208 läuft bereits im Normal Drive Mode, das habe ich bereits
kontrolliert. Das mit dem Nulldurchgang habe ich falsch beschrieben und
wohl falsch verstanden. Danke für den Hinweis! Immer wenn das Signal der
einen Spule das Max oder Min erreicht hat, dann hat die andere Spule
einen Nulldurchgang. Das sollte mit den Taktsignalen, weiter oben im
Code, passen.
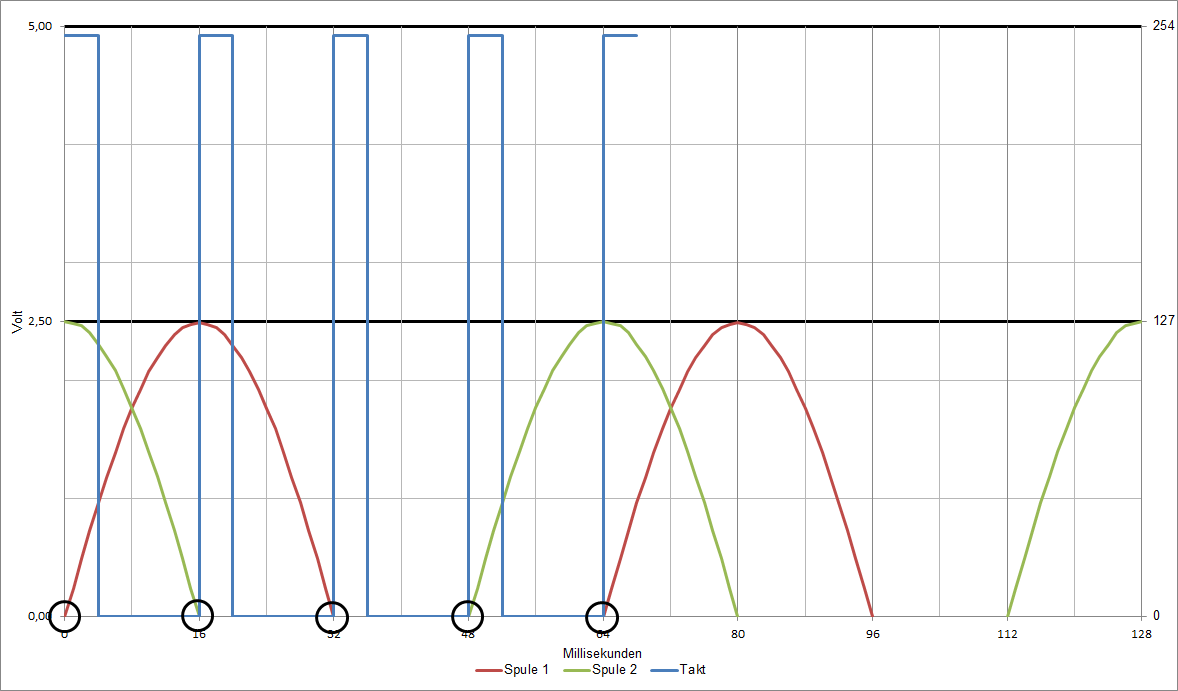
@Wolfgang: Schau doch mal auf das angehängte Bild. Meinst du das so mit
dem einzuspeisenden PWM-Signal? Oder hab ich das falsch verstanden? Ich
habe auch noch das Taktsignal hinzugefügt.
Hallo Timo!
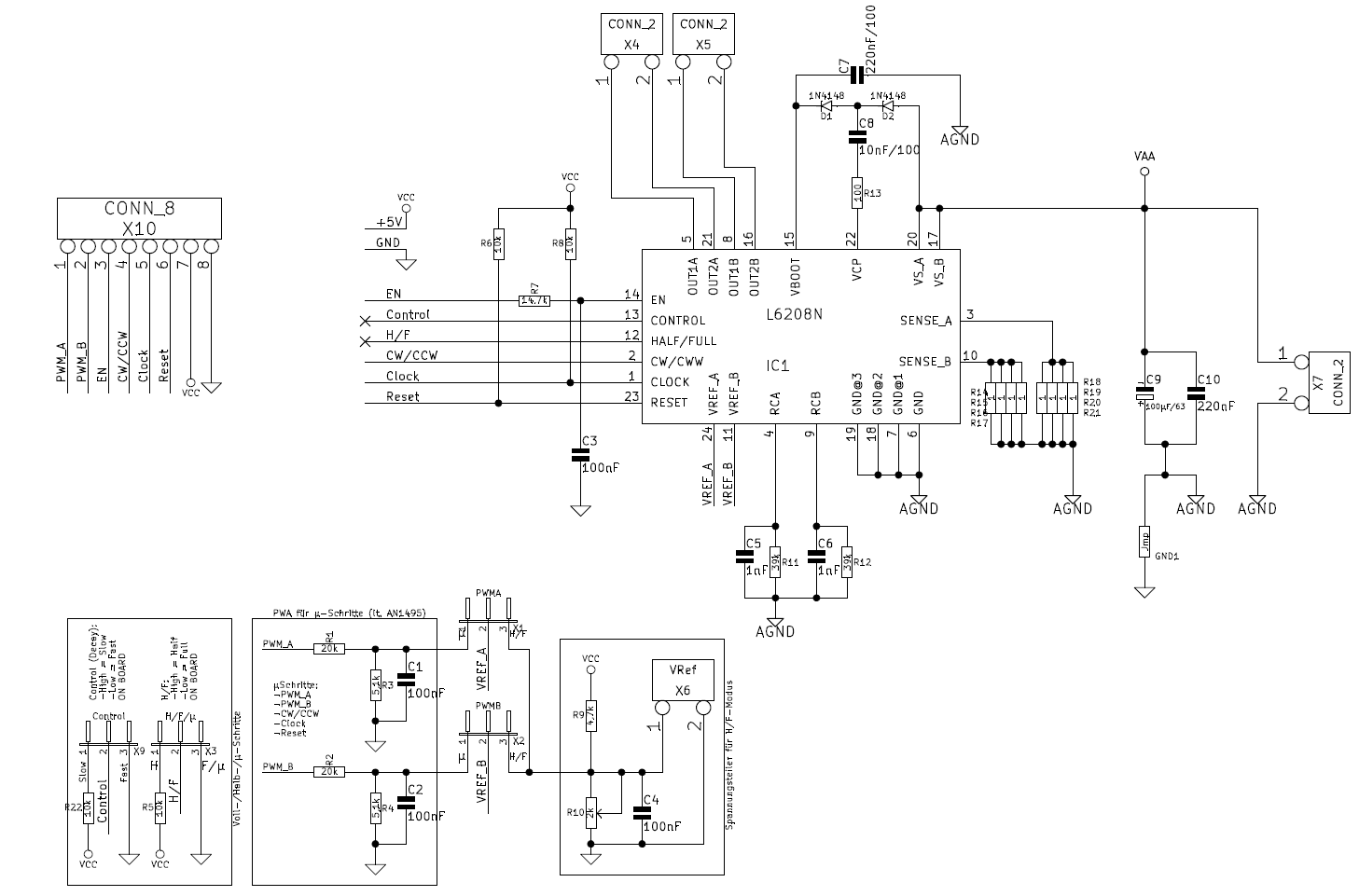
Am Besten du postest mal deinen gesamten Schaltplan. Vielleicht
funktioniert auch die Stromregelung nicht richtig.
Ohne Oszi wird eine weitere Fehlersuche allerdings schwierig. Es kann
sein dass die 100nF deutlich zu viel sind, und du damit deinen Sinus
versaust wenn du schneller fährst. Mit welcher Frequenz läuft denn die
PWM, und mit welchen Taktraten versuchst du den Motor anzusteuern?
Mit freundlichen Grüßen
Thorsten Ostermann
Hallo,
den Schaltplan habe ich angehängt. Die Schaltung soll mit Jumpern
zwischen Voll-, Halb- und Mikroschritt umschaltbar sein. Voll- und
Halbschritt funktionieren auch super.
PWM läuft mit 62,5kHz (16MHz Takt, Vorteiler 1, 8-Bit Timer) und den
duty-Wert vom PWM ändere ich mit 40Hz. Ich sehe aber, dass das von mir
falsch berechnet wurde. Ich wollte 400Hz haben, bin aber mit dem Komma
verrutscht und hab anstatt 0,0025s leider mit 0,025s gerechnet. Der
korrekte OCR1A Wert hätte 624 sein müssen.
Ich hab gerade mal gerechnet, dein Tiefpass am PWM-Ausgang hat eine
Eckfrequenz von 80Hz. Das ist mindestens eine 10'er Potenz zu niedrig,
eher zwei.
Mit freundlichen Grüßen
Thorsten Ostermann
Hallo Thorsten,
hast du einen Tipp, was ich am Code oder an der Schaltung verändern
sollte, damit das PWM Signal sauber läuft.
Und wenn du noch einen Tipp hast, wo ich mich am besten zum Thema
"Tiefpass" schlau machen kann (Buch, gute Website o.ä), wäre es auch
super. Ich hab aufgrund deiner Antwort angefangen zu googlen, bislang
sind das noch Böhmische Dörfer, aber das wird schon ;)
Alles Gute, Timo
Ah! Ich müsste einfach den Kondensator auf 10nF, bzw. 1nF reduzieren,
richtig?
Das wäre einfach zu ändern, aber mir stellt sich eher die Frage, wieso
ich eine Grenzfrequenz von 800Hz oder besser 8000Hz benötige.
Sorry, wenn ich mich blöd anstelle. Ich hoffe nach ein paar Schupser in
die richtige Richtung geht mit weniger Fragen weiter! Daher vielen Dank
für die Hilfe!!
Thorsten Ostermann schrieb:> Ich hab gerade mal gerechnet, dein Tiefpass am PWM-Ausgang hat eine> Eckfrequenz von 80Hz.
Daran könnte es liegen. Das erzeugt natürlich einen Phasenversatz und
verschleift den Sinus.
Mach mal die 100n Cs oder die Rs kleiner. Oder fahr mal deutlich
langsamer den Sinus durch.
Hallo Timo!
Zum Thema Filter siehe z.B.
http://www.elektronik-kompendium.de/sites/slt/0206172.htm
Die Eckfrequenz des Filters muss so tief sein, dass das Filter die PWM
ausreichend glättet. Andererseits aber so hoch, dass die eingehenden
Taktsignale (Mikroschritte) auch noch umgesetzt werden können.
Üblicherweise hält man jeweils eine 10'er Potenz Abstand.
Beispiel: Max. Mikroschrittrate 20kHz (1/8-Schritt, entspricht dann 5kHz
Halbschritt und damit 12,5U/s) -> Eckfrequenz TP-Filter 200kHz ->
erforderliche PWM-Frequenz 2MHz.
Das war damals (anno 2000) für mich der Grund bei meiner Endstufe
"HP-Step" (mit L6203 und L6506) einen DAC statt PWM zu verwenden:
http://www.ostermann-net.de/electronic/schritt/sm_hpstep.htmhttp://www.mechapro.de/pdf/hpstep_doku_15b.pdf
Mit freundlichen Grüßen
Thorsten Ostermann
Den Elektronik-Kompendium-Artikel hatte ich mir auch eben durchgelesen
;)
Ich versuche mal deinem Beispiel zu folgen und eigene Werte einzusetzen:
1/8-Schritt
2U/s = > 3200 Takte => 3.200Hz
Eckfreq. Tiefpassfilter => 32.000Hz
PWM-Frequenz => 320.000Hz
Die PWM-Frequenz bekommt man mit einem 8-Bit Timer, Vorteiler 1 und
Compare-Wert von 49 hin (16MHz µC-Takt).
Den Tiefpass würde ich mir R = 5k und C = 1nF auslegen.
Wäre das (für 2U/s) eine realistische Auslegung?
Naja, 2U/s ist nicht viel, aber zum Testen reicht es erstmal aus.
Aber eine praktische Frage hab ich noch. Im ersten Posting hab ich die
Tiefpass-Schaltung als Bild angehängt. Die Tiefpass-Schaltung vom
Elektronik-Kompendium sieht aber den zweiten Widerstand nicht vor (der
mit 5,1k). Wenn ich den Tiefpass mit 5k und 1nF realisieren soll, könnte
ich den zweiten Widerstand weglassen? Wenn nicht, wie groß sollte der
sein?
Der zweite Widerstand soll vermutlich den statischen Fall ohne PWM
abfangen (z.B. wenn der Controller hängt oder programmiert wird), damit
der Pegel am Vref Eingang des Treibers nicht zu groß wird. Der verträgt
nämlich nicht bei allen ICs volle 5V (->Datenblatt).
Mit freundlichen Grüßen
Thorsten Ostermann
Thorsten Ostermann schrieb:> Der zweite Widerstand soll vermutlich den statischen Fall ohne PWM> abfangen
Nö, der reduziert als Spannungsteiler einfach die Ausgangsspannung des
µC von 0..5V entsprechend 0..255 PWM-Schritten auf die Vref des
Treibers. Im Datenblatt sollte stehen, was der Treiber für eine maximale
Vref möchte.
Würde man das per PWM machen, könnte man von den 256 PWM-Stufen nur 1/5,
also 50 Stufen nutzen.
Timo schrieb:> 1/8-Schritt> 2U/s = > 3200 Takte => 3.200Hz> Eckfreq. Tiefpassfilter => 32.000Hz> PWM-Frequenz => 320.000Hz
Dabei kannst Du aber annehmen, dass Du bei höherer
Schrittgeschwindigkeit eh keinen µStep-Betrieb mehr brauchst. Erstens
läuft der Motor dann auch bei Viertel- oder Halbschritt rund, zweitens
verhindert die Induktivität des Motors, dass der Windungsstrom der Vref
folgt. Also kann man mit steigender Schrittgeschwindigkeit die Auflösung
runternehmen, 1/64tel => 1/32tel => 1/16tel => 1/8tel => 1/4tel. Und
dann kann man die hohen Schrittzahlen bei konstanter Vref durch den
normalen Stepperbetrieb mit Halb- oder Viertelschritt erreichen. Damit
sollte eine PWM-Frequenz von 24kHz (schafft der ATmega8 mit 12MHz Quarz
bei 256er PWM) ausreichen.
Timo schrieb:> @Wolfgang: Schau doch mal auf das angehängte Bild. Meinst du das so mit> dem einzuspeisenden PWM-Signal? Oder hab ich das falsch verstanden? Ich> habe auch noch das Taktsignal hinzugefügt.
Hallo Timo,
so haut das mit den Sinuswellen noch nicht ganz hin. Es muss aussehen,
wie hinter einem Vollwellengleichrichter, also immer der negative Teil
(180..360° beim Sin bzw. 90..270° beim Cos) nach oben geklappt und das
für beide Spulen. Und der Phasengenerator vom Stepper-Treiber muss
darauf auch synchronisiert sein, damit die Zuordnung der
Polaritätsumschaltung zu den Nulldurchgängen stimmt. Ohne
Synchronisation kann es sonst passieren, dass der Treiber immer gerade
auf dem Maximum die Polarität umschaltet.