Hallo! Könnte mal jemand aufzeigen, wie man aus den Angaben zum Motor ST8918M4508 von Nanotec herausfindet mit welcher maximalen Drehzahl der Motor im Leerlauf laufen sollte ? Hier der Link zum Motor: http://de.nanotec.com/produkte/566-st8918-schrittmotor-nema-34/ Der Motor wird mit 48V Betrieben und die Wicklungen sind parallel verschaltet. Aus der Drehzahl/Drehmoment Kennlinie entnehme ich, dass ich bei 1125 RPM noch 1 Nm Drehmoment haben sollte. Jedoch komme ich unter Verwendung der Nanotec Schrittmotortreibers SMCI36 knapp auf 1000 RPM (und das nur im adaptiven Mikroschrittbetrieb (128) mit maximalem Phasenstrom reduziert auf 40%).. Unter Verwendung des von mir gewünschten Viertelschrittbetriebes komme ich auf knapp 700 RPM bei maximal spezifiziertem Phasenstrom von 6A. Da stellen sich mir folgende Fragen: 1. Wie bestimme ich im Voraus, mit welcher Drehzahl ich einen Schrittmotor (im quasi Leerlauf) dann tatsächlich betreiben kann ? 2. Wiso erreiche ich die höchste Drehzahl mit 40% Phasenstrom wobei bei 100% Phasenstrom der Schrittmotor schon wesentlich früher nichtmehr folgen kann? Macht keinen Sinn für mich. 3. Habe ich ein Problem mit meinem Aufbau, dass ich nicht auf die 1100 RPM, wie im Datenblatt gezeigt komme? Bzw. wie schnell müsste der Motor denn mit dieser Steuerung/Speisung/Verschaltung drehen? Das muss sich doch bestimmen lassen.. ? Hintergrund: Der Motor treibt eine CNC Maschinenachse an. Für den Eilgang habe ich mit den 1100 RPM gerechnet und natürlich die Spindelsteigungen und alles darauf ausgelegt. Da ich jetzt nur knapp die Hälfte fahren kann, dauert das komplette Abfahren der gesamten Achslänge doppelt so lange und somit eeewig.. so ist das unbrauchbar.. Besten Dank für eure Antworten!
Moin, "angetriebene Achse einer CNC-Maschine" beißt sich in meinen Augen aber heftig mit der Aussage "quasi Leerlauf". Spannend wäre noch die Startgeschwindigkeit und die Beschleunigungsrampe mit der du die Zielgeschindigkeit anfährst. Beschleunigte Maße heißt natürlich auch reichlich Drehmoment vom Motor! -- SJ
Hi! Der Motor ist noch nicht in der Maschine verbaut und ich kann die 1100 RPM nicht erreichen.. Das bezeichne ich als Leerlauf :)
Die Rampe beim Beschleunigen habe ich bewusst sehr niedrig gewählt (20 Hz/ms) und auch mit der Startgeschwindigkeit habe ich schon gespielt.. Bringt nichts.. Egal wie langsam ich beschleunige, der Motor fällt aus dem tritt ab ca. 700 RPM (im Viertelschrittbetrieb)..
Indexer schrieb: > der Motor fällt aus > dem tritt ab ca. 700 RPM (im Viertelschrittbetrieb).. Kann dein Kontroller nicht umschalten auf Vollschritt ab einer bestimmten Drehzahl? Gruss Reinhard
Nicht dass ich wüsste. Im Datenblatt des SMCI36 ist nichts davon erwähnt.. Jedoch ist auch nirgends so genau erklärt, was Nanotec unter "Adaptiver Mikroschritt" versteht.. wohlmöglich ist das damit gemeint.. Ich denke das Nanotec schon einen state-of-the-art controller gebaut hat... Ich müsste somit doch in der Lage sein, im Vollschritt die gewünschte hohe Drehzahl erreichen zu können.. Dies habe ich jedoch auch schon getestet.. Bei 700 scheint Schluss zu sein..werde aber morgen nochmals testen..
Reinhard Kern schrieb: > Kann dein Kontroller nicht umschalten auf Vollschritt ab einer > bestimmten Drehzahl? Und warum sollte der Motor im Vollschrittbetrieb besser laufen?
Das ganze Programm: Anfahrrampen, Bremsrampen und beherrschbare Maxima hängen nur zu einem winzigen Teil vom Motor ab. Durch die mechanische Kopplung der Maschine mit der Motorachse ändern sich sämtliche Motorparameter und Du kannst somit das Datenblatt vergessen.
Wolfgang schrieb: > Und warum sollte der Motor im Vollschrittbetrieb besser laufen? Besser nicht, was immer das heisst, aber schneller - dann liegt gleich die volle Spannung an der Wicklung an, entsprechend steigt der Strom schneller, das ist in etwa das gleiche wie eine höhere Spannung. Wunder bewirkt es allerdings nicht. Aber höhere Spannung ist prinzipiell eine Möglichkeit für höhere Drehzahl, solange der Motor nicht verglüht. Muss man halt testen, welche Temperatur im stabilen Zustand erreicht wird. Gruss Reinhard
Wenn man erhoehte Drehzahlen haben moechte, sollte man eher einen DC Servomotor, resp heutzutage einen BLDC waehlen. Mit Decoderscheibe.
Reinhard Kern schrieb: > Wolfgang schrieb: >> Und warum sollte der Motor im Vollschrittbetrieb besser laufen? > > Besser nicht, was immer das heisst, aber schneller - dann liegt gleich > die volle Spannung an der Wicklung an, entsprechend steigt der Strom > schneller, das ist in etwa das gleiche wie eine höhere Spannung. Wunder > bewirkt es allerdings nicht. Dann könnte man auch einfach die Frequenz für die Mikroschritte erhöhen. Der Anstieg des Stroms hängt von der Induktivität und der angelegten Spannung ab. Für eine gewisse Spannung steigt der Strom auch nur mit einem entsprechenden dI/dt. Steuert man den Motor schneller an, dann steigt der Strom während dieser auf immer geringere Maximalwerte, d.h. die Chopperregelung der Endstufe kommt dann gar nicht mehr dazu, den Strom abzuschalten, weil er das gewünschte Maximum gar nicht mehr erreicht -> Drehmoment sinkt bis hin zum Stillstand. Da hilft dann auch kein Vollschrittbetrieb. > Aber höhere Spannung ist prinzipiell eine Möglichkeit für höhere > Drehzahl, solange der Motor nicht verglüht. Muss man halt testen, welche > Temperatur im stabilen Zustand erreicht wird. Genau. Übrigens spricht noch etwas anderes ganz massiv gegen Vollschrittbetrieb: die Resonanzen. Diese darf man auf keinen Fall unterschätzen und diese hat man umso besser im Griff, je mehr man den Phasenstrom einem Sinus annähert, also Mikrostepping betreibt. Resonanzen dürften auch der Grund für das Phänomen sein, das der OP ansprach: mit hohem Strom erreicht der Motor nicht die Maximaldrehzahl, wohl aber bei reduziertem Strom. Offenbar führt die Volllast zu entsprechenden Resonanzen. Meiner Erfahrung nach sind die Drehzahlkurven der Hersteller nette Bildchen, aber für die Praxis - also bei belastetem Motor an einem Gebilde mit beliebigen Resonanzstellen - ziemlich uninteressant. Aber vielleicht liest ja Thorsten hier mit und kann seine Einschätzung abgeben. Der ist ja sozusagen unser Stepper-Guru hier ;-)
Reinhard Kern schrieb: > Aber höhere Spannung ist prinzipiell eine Möglichkeit für höhere > Drehzahl, solange der Motor nicht verglüht. Warum sollte der Motor dabei verglühen? Solange der Wicklungstrom per PWM geregelt ist, wie das heutzutage alle ernst zu nehmenden Schrittmotortreiber tun, ist das Haupthinderniss für das Erreichen des vollen Drehmoments bei höherer Schrittfrequenz die Wicklungsinduktivität. Bei kurzen Schritten und niedriger Spannung kann sich dann trotz Regelung der gewünschte Strom nicht aufbauen. Die höhere Spannung sorgt einfach für einen schnelleren Stromanstieg auf dem Schritt, bis die Regelung greift und das Tastverhältnis ggf. zurückfährt. Bei niedriger Drehzahl ist die Gefahr für Verglühen des Motors viel größer, wenn der Strom im Treiber zu hoch eingestellt ist - unabhängig von der Spannung.
Ganz im Leerlauf ist ggf. nicht ideal um eine hohe Drehzahl zu erreichen. Es gibt dann Resonazen bei relativ hohen Frequenzen. Schon mit nur etwas zusätzlichem Trägheitsmoment läuft der Motor runder und dann ggf. schneller, braucht aber auch eine langsamere Rampe. Das es mit weniger Strom und Mikroschirtt besser geht, spricht für eine Resonanz als Grenze. Eine höhere Spannung könnte helfen, wenn der Treiber mitmacht. Die Verluste im Motor steigen dadurch ggf. etwas über parasitäre Effekte wie Wirbelstromverluste, aber schon ein leicht (z.B. 10%) kleinerer Strom kann das ausgleichen - für die hohen Drehzahlen, wo das Drehmoment abfällt sinkt der Strom ja sowieso unter den Sollwert, es reduziert sich also nur das Moment bei kleinen Drehzahlen. Bei der Spannung muss man ggf. berücksichtigen das etwas Spannung am Treiber verloren geht, der Motor also nicht die volle Spannung sieht - damit die Daten besser aussehen und vergleichbar sind, wird im Motordatenblatt vermutlich die Spannung am Motor angegeben sein.
Ulrich schrieb: > Ganz im Leerlauf ist ggf. nicht ideal um eine hohe Drehzahl zu > erreichen. Und in den Fußnoten zu den Drehzahlkurven findet sich zumeist der Hinweis, mit welchem Schwingungsdämpfer (auf der Achse angebracht) gemessen wurde.
Also ich fasse mal zusammen: 1. Für höhere Drehzahl sollte eine höhere Betriebsspanunnung helfen. Weil dadurch der Phasenstrom schneller ansteigt. 2. Resonanzen können im Leerlauf dafür verantwortlich sein, dass hohe Drehzahl nicht erreichbar sind. Da der Motor im Leerlauf arbeitet, werden entsprechende Resonanzstellen nicht durch eine angehängte Mechanik bedämpft. 3. Resonanzstellen bei hohen Drehzahlen sind ausgeprägter, wenn mit hohem Phasenstrom bestromt wird. Höhere Anregung zum Schwingen, durch höhere Ströme. 4. Resonanstellen äussern sich auch stärker, wenn nicht mit Mikroschritt betrieben wird. Bei Mikroschrittbetrieb ist der Ansteuerung näher an einem Sinus, was weniger Oberwellen und somit weniger Anregung zum Schwingen bedeutet. 5. Herstellerdiagramme nur bedingt brauchbar für die Auslegung eines Praktischen antriebes. 6. Lösungen für mein Problem: Auf Servomotoren wechseln. Frage: Würd es etwas bringen (für das Erreichen höherer Drehzahlen), wenn ich meine Schrittmotoren mit Encodern ausrüsten würde ? (Die Steuerung würde das unterstützen).. Wennn ja... könnte ich mich in den Arsch beissen, da der Encocer und die Montage bei Nanotec direkt nur ca. 50 Euro pro Motor gekostet hätte. Mir ist jedoch immernoch unklar, wie man denn jetzt einen Schrittmotorantrieb zuverlässig auslegen kann, ohne das ganze Aufzubauen und zu testen. Schliesslich will ich ja nicht zig Motoren kaufen und probieren, sondern eine vernünftige Auslegung mit meinen mechanischen Anforderungen machen und dann muss das so laufen wie geplant.. Gruss
Wenn du irgendwo Resonanzen hast und dein ganzes System schwingt, kannst du die Resonanzfrequenzen ändern, indem du die Massen einzelner Achsen änderst. Dadurch verschiebst du die Resonanzfrequenz. Ganz weg bekommst du sie vielleicht nie, aber wenn sie in einen Drehzahlbereich geschoben wird, der uninteressant ist, hast du schon gewonnen. Über solche Themen gibt es ganze Bücher und Dissertationen, alle bestimmt schon mehr als 20 oder 30 Jahre alt. Guck mal nach Büchern über Zahnriemengetriebe. Dort wir meistens etwas über die Systemauslegung erklärt und die Probleme. Ob dich das bei der Motorauswahl unterstütz, weiß ich nicht. Ich habe die Motoren bisher einfach immer überdimensioniert und den Rest über die Software realisiert. Zu langsam anfahren ist nicht gut (schwingt) und zu schnell anfahren auch nicht (verliert Schritte). Gleiches gilt für das Bremsen. Da ich bisher nur mit Einzelstücken zu tun hatte, konnte ich mit meiner begrenzten Ahnung natürlich etwas rumprobieren bis es funktioniert hat. Irgendwann hat man auch ein gewisses Gefühl dafür und die meisten Sachen funktionieren im ersten Schritt.
> An der Versorgungsspannung muss ein Ladekondensator von mindestens > 4700 μF (10000 μF) vorgesehen sein, um ein Überschreiten der > zulässigen Betriebsspannung (z.B. beim Bremsvorgang) zu vermeiden. Versuche es mit 60V. Unterschätze den Leitungswiderstand nicht. Oft laufen Stepper mit Last besser als ohne Last. Bitte um ein gutes Foto!
Hallo "Indexer"! > Aus der Drehzahl/Drehmoment Kennlinie entnehme ich, dass ich bei 1125 > RPM noch 1 Nm Drehmoment haben sollte. Zur Brauchbarkeit der Kennlinien wurde ja bereits etwas gesagt. Je glatter die Kurve, desto praxisferner ist das ganze. Resonanzstellen werden da von einigen Herstellern vermutlich durch geschicktes Platzieren der Messpunkte weggebügelt. Bei den Kurven von Nanotec fehlt die Angabe, mit welchem Treiber und mit welcher Last gemessen wurde. Das hat z.T. einen deutlichen Einfluss auf die Kennlinie. > 1. Wie bestimme ich im Voraus, mit welcher Drehzahl ich einen > Schrittmotor (im quasi Leerlauf) dann tatsächlich betreiben kann? Rein theoretische Betrachtungen sind schwierig. Meist scheitert es schon daran, das die Belastung des Motors (Lastmoment) nicht hinreichend genau bestimmt werden kann. Da geht ja auch die Reibung sowie die dynamischen Anteile (Beschleunigungskräfte) mit ein. > 2. Wiso erreiche ich die höchste Drehzahl mit 40% Phasenstrom wobei bei > 100% Phasenstrom der Schrittmotor schon wesentlich früher nichtmehr > folgen kann? Macht keinen Sinn für mich. Bei den Drehzahlen erreicht der Motor den Nennstrom schon lange nicht mehr. Es ist also überspitzt gesagt (in gewissen Grenzen) egal, welchen Strom du einstellst. Das wirkt sich nur bei niedrigeren Drehzahlen aus. Den Unterschied macht hier das Ansteuervverfahren ("Adaptiver" Mikroschritt vs. 1/4-Schritt. > 3. Habe ich ein Problem mit meinem Aufbau, dass ich nicht auf die 1100 > RPM, wie im Datenblatt gezeigt komme? Bzw. wie schnell müsste der Motor > denn mit dieser Steuerung/Speisung/Verschaltung drehen? Das muss sich > doch bestimmen lassen.. ? Wenn du ohnehin "nur" 1Nm brauchst, warum nimmst du dann einen Motor mit so großer Massenträgheit? Ist deine Last entsprechend schwer und träge? Hast du das mal nachgerechnet? Sonst bist du u.U. mit einem Nema23 Motor mit ~2,0Nm Haltemoment besser bedient. Der dickere Motor braucht sonst einen Großteil seiner Leistung, um seinen eigenen Rotor zu beschleunigen. > Hintergrund: Der Motor treibt eine CNC Maschinenachse an. Für den > Eilgang habe ich mit den 1100 RPM gerechnet und natürlich die > Spindelsteigungen und alles darauf ausgelegt. Da ich jetzt nur knapp die > Hälfte fahren kann, dauert das komplette Abfahren der gesamten Achslänge > doppelt so lange und somit eeewig.. so ist das unbrauchbar.. Dann musst du mit der Spannung hochgehen, wenn du bei dem Motor bleiben willst. Ein bisschen Luft hast du ja bei dem Treiber noch. Mit freundlichen Grüßen Thorsten Ostermann
> Es ist also überspitzt gesagt (in gewissen Grenzen) egal, > welchen Strom du einstellst. Überspitzt gesagt: ja. Praktisch: nein (siehe unten) Resonanzen können sich wie folgt äußern: bei geringen Frequenzen (grob gesagt um die 400 Hz): hier hilft es, den Motor im Mikroschritt zu betreiben. Später treten nochmals andere Resonanzen auf: die kommen daher, dass der Polradwinkel jittert, d.h. durch die unterschiedliche Stellung und daraus resultierende Abdeckung schwankt die Induktivität der Spulen und damit die Stromanstiegsgeschwindigkeit. Die Frequenz ist jedoch so hoch, dass (wie Thorsten andeutete), der eingestellte Strom überhaupt nicht mehr erreicht wird, d.h. die Strombegrenzung wird nicht aktiv. Die Folge ist, dass dem "Schrittstrom" eine weitere niederfrequente Komponente hinzugefügt wird. Lösungen: 1. Den Sollstrom so niedrig einstellen, dass er wirklich erreicht wird und somit die o.g. "Extravaganzen" beschnitten werden. 2. Dämpferscheiben (z.B. die gelben Vexta Smart Damper) verwenden, wenn möglich auf einem Motor mit zweitem Wellenende. Die bewirken Wunder!
Hallo, die maximale Motordrehzahl ist erreicht, wenn die Induktionsspannung des Motor die maximale Umrichter-Spannung erreicht. Viele Grüße Ignaz
Und für diese bahnbrechende Erkenntnis musst du einen über 2 Jahre alten Thread wieder ausgraben? Mit freundlichen Grüßen Thorsten Ostermann
Ich finde, die 'Bahnbrechende Erkenntnis' bringt EINEN drehzahlbegrenzenten Effekt gut auf den Punkt. Bin auf diesen alten Thread gestoßen, weil meine gebraucht gekaufte Tron-CNC ebenfalls nur erstaunlich geringe Stepper Drehzahlen mitmacht, bevor Resonanzen auftreten. Die Mechapro Slider-SFX (entsprechend Motordatenblatt auf 2A begrenzt und 1/16 Microstepps) wird mit einem Ringkerntrafo von 2*15V in Reihe, also 30V) versorgt und die beiliegenden Nema23 1,3Nm 2A Stepper laufen nur bis 1200mm/min (= 300U/min) einwandfrei rund. Darüber gibt es Resonanzen bis hin zum scheinbaren blockieren der betreffenden Achse. Mir war vorher auch nicht klar, dass die Motoren die maximale Drehzahl irgendwie begrenzen würden. Dachte eher, die Ansteuerung würde schlapp machen. (zur Zeit Arduino UNo mit ESTLCAM) aber an der Ansteuerung scheint es nicht zu liegen. Auch wenn das Resonanzproblem mit der maximalen Spannung vermutlich nicht viel zu tun hat, würde gerne testweise mal die Spannung erhöhen indem ich ein anderes Netzteil anschließe, denn nach obiger 'Bahnbrechender Erkenntnis' sollte die max Drehzahl dadurch verdoppel werden, aber wie es aussieht bin ich schon an der Obergrenze der Slider SFX. Im Moment bin ich noch in der Phase von Testfräsungen mit einem 2mm Fräser auf einer Kress 1050, aber ich will irgendwann auch mal meine Festool Fräser mit 8mm benutzen und die brauchen einen ordentlichen Mindestvorschub dass das Holz und auch die Fräser nicht verbrennen. Denke mal die sollten mindestens 2000mm/min bekommen. Irgendwas muss ich also unternehmen. Andere Treiber könnte ich zwar mit höheren Spannungen versorgen, aber das Resonazproblem bleibt natürlich trotzdem. Wenn alle Stricke reißen müsste ich mir zumindest für die X und Y Achse Servomotoren mit der passenden Elektronik besorgen.
Angehängte Dateien:
-

toshiba_6560.png
380 KB
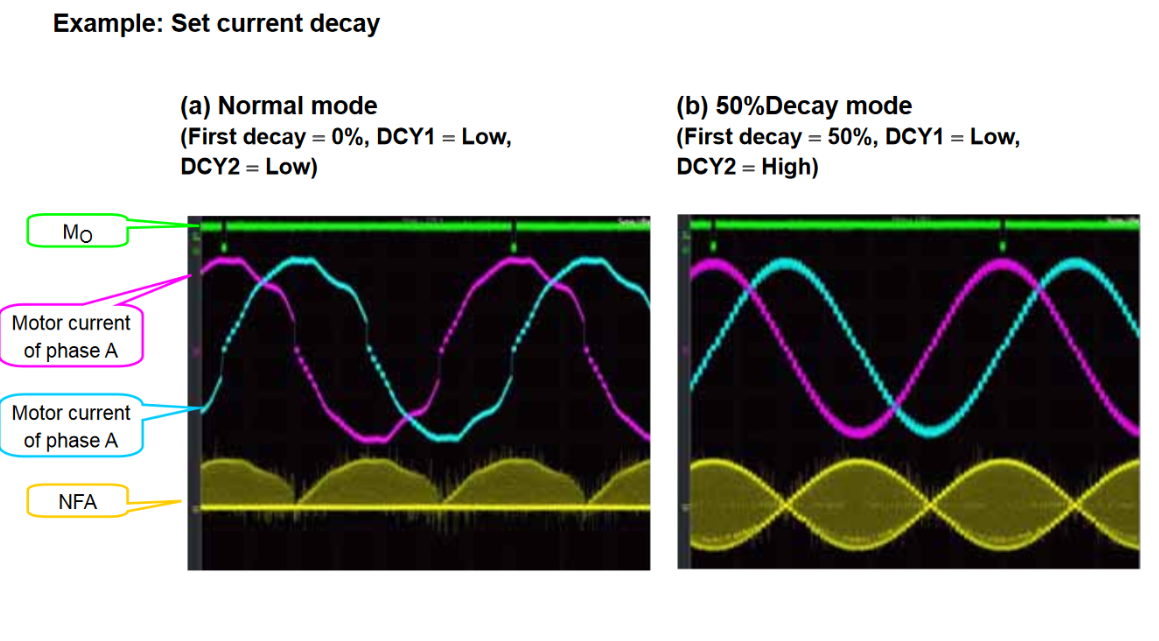
Servus, ohne daraus eine Wissenschaft zu machen: -ein Oszilloskop am Shunt dranhalten und den Sinus anstreben. Sonst mit den Microstep runter gehen, bzw Spannung erhöhen. https://www.youtube.com/watch?v=XJKodmZihbk An diesen Video sieht wunderbar, wie man durch spielen mit decay mode ein besseres Ergebnis erzielen kann. Aber dennoch war die Geschwindigkeit zu hoch gewählt und man hatte keine Last gehabt. mfg
Die 30V des Trafos sind Wechselspannung, nach Gleichrichtung und Glättung ergibt das ungefähr 42V. Viel mehr können die A3959 auf der Karte nicht. Wenn du deutlich mehr Drehzahl willst, musst du die Spannung tatsächlich in etwa verdoppeln. H-Brücken für 80V gibt es aber nicht mehr als Single-Chip Lösung, was sich auf den Preis der Endstufen und die Auswahl an Geräten auswirkt. Ich glaube aber nicht, dass die Motoren bei der Tron der begrenzende Faktor sind. Die Tron ist ja ein Projekt, was auf möglichst niedrige Herstellungskosten ausgelegt ist. Die Rundführungen und die Trapezgewindespindeln haben einen extrem niedrigen Wirkungsgrad. Trapezgewinde hat typisch ein eta von 0,3-0,4, d.h. 60-70% der Antriebsleistung gehen in Reibung verloren. Und da sind die Führungen noch nicht berücksichtigt. Durch einen Umbau auf Kugelrollspindeln sollte sich da also einiges rausholen lassen. Dann spielt natürlich auch die verwendete Software eine Rolle, die Einstellungen für die Rampen und die Art und Weise, wie die Taktsignale erzeugt werden - also im PC oder auf einem externen Controller, und wieviel Jitter die Signal haben. Mit freundlichen Grüßen Thorsten Ostermann
Hallo Karl-alfred, > Ich finde, die 'Bahnbrechende Erkenntnis' bringt EINEN > drehzahlbegrenzenten Effekt gut auf den Punkt. Aber das ist ja keine neue Erkenntnis. Dazu habe ich 2011 schon etwas geschrieben, und auch das war an sich nicht neu, sondern nur (hoffentlich) verständlich zusammengefasst: http://www.schrittmotor-blog.de/die-sache-mit-der-spannung/ Mit freundlichen Grüßen Thorsten Ostermann
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.