Hallo, also wenn ein Schrittmotor z.b. 2 Spulen hat --> 4 Anschlüsse und die Mittelanzapfung ist auf Masse, dann ist der unipolar und wenn an dieser Versorgungsspannung anliegt, dann ist dies ein bipolarer Schrittmotor, richtig? beim unipolaren: er hat 4 anschlüsse und 2 davon liegen immer auf Masse un die anderen auf einen Spannungswert --> Motor macht einen Schritt, dies macht eine Steuerung, d.h. schaltet ein und aus(2 anschlüsse jedoch immer auf masse) --> Motor dreht sich. Stimmt das was ich sage? Gibt es noch etwas hinzuzufügen? Was ist aber dann Chopperbetrieb benau? Diese ist doch eine Stromregelung für Schrittmotoren oder? ABer was bringt das bitte genau? Was für einen Sinn hat dies? Nach- und Vorteile? mfg guest
guest12 schrieb: > Diese ist doch eine > Stromregelung für Schrittmotoren oder? ABer was bringt das bitte genau? Damit ein Schrittmotor schnell dreht, muss man die Spulen mit hoher Spannung ansteuern, damit der Strom schnell genug ansteigt*. Dazu kann man sie an eine höhere Spannung anschliessen als für den Spulennennstrom nötig und einen Vorwiderstand verwenden, der dann eine Menge Leistung verbrät, oder der Treiber regelt den Strom eben durch Choppen herunter. Als Zugabe kann man dann durch Vorgabe geringerer Stromwerte auch Teilschritte ausführen, um die Auflösung zu steigern oder einen ruhigeren Lauf zu erzielen. * Man kommt sonst schnell in einen Bereich, indem der Strom innerhalb der für einen Schritt zur Verfügung stehenden Zeit nicht mehr bis zum Nennstrom ansteigen kann. Gruss Reinhard
guest12 schrieb: > Stimmt das was ich sage? Gibt es noch etwas hinzuzufügen? Nein... 'Jeder' Schrittmotor (...) hat zwei Wicklungen, deren Enden nach außen geführt sind. Das sind deine vier Anschlüsse. Mit diesen vier Anschlüssen kannst du den Motor bipolar betreiben. Dazu legst du an das eine Ende einer Spule eine positive Spannung, an das andere Masse und hast einen Stromfluss in eine Richtung durch die Wicklung. Dann kannst du die Anschlüsse der Spule vertauschen und hast einen Strom in die entgegengesetzte Richtung. Beim unipolaren Motor hat jede der beiden Wicklungen zusätzlich noch eine Mittelanzapfung, die herausgeführt ist. Macht insgesamt also sechs Anschlüsse. Prinzipiell kannst du die beiden Mittelanzapfungen offen lassen und den Motor bipolar betreiben, wie oben beschrieben. Außerdem könntest du die Mittelanzapfungen beide auf positive Spannung legen. Wenn du nun das eine Ende einer Wicklung an Masse legst, fließt ein Strom in eine Richtung, aber nur von der Mittelanzapfung zum Ende der Wicklung. Der Strom durchfließt quasi nur die halbe Wicklung - das andere Ende der Wicklung ist ja offen. Legst du das andere Ende der Wicklung an Masse, dann fließt der Strom in die andere Richtung. Er durchfließt dann quasi die andere Hälfte der Wicklung. > Was ist aber dann Chopperbetrieb benau? Diese ist doch eine > Stromregelung für Schrittmotoren oder? Ja, man schaltet die Spannung ein- und aus. D.h. man verschaltet das eine Wicklungsende abwechselnd auf Masse oder lässt es offen. > ABer was bringt das bitte genau? > Was für einen Sinn hat dies? Nach- und Vorteile? Weniger Verlustleistung im Stillstand, mehr Auflösung mit Mikroschritten, gleichförmigeres Drehmoment usw. Mehr Aufwand...
> --> 4 Anschlüsse und die Mittelanzapfung ist auf Masse Bei 4 Anschlüssen gibtz ers keine Mittelanzapfung. > Stimmt das was ich sage? Nein. > Was ist aber dann Chopperbetrieb benau? Stromregelung. Eine Spule wird nicht dauernd an eine (hohe) Spannung gelegt (egal welcher Polarität), sondern nur so lange bis der Strom in ihr bis zum zulässigen Maximum gestiegen ist, dann wird wieder abgeschaltet bis der Strom etwas fällt. Das löst KEINEN Schritt aus, denn der Durchschnittsstom bleibt ja hoch und damit auch das Magnetfeld, sondern erlaubt es, den Motor an einer höheren Spannung zu betreiben, als er dauerhaft verträgt, und das wiederum erlaubt, daß er schneller drehen kann.
Angehängte Dateien:
-

chopping.jpg
27 KB
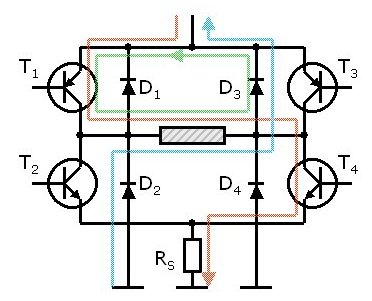
Danke. ich hab hier ein foto, wo man sehen kann wie sowas aussieht mit Chopping. Ich glaub wenn ihr mir das mit Hilfe dieses Bildes erklärt, dann verstehe ich es besser. Was ist das für eine Spule im Bild? Wo wird denn jetzt die Schaltung angeschlossen. Sind T1-T4 diese "4 Anschlüsse"? Ist das ein bipolarer Motor? Was bringt der Widerstand? Soll das der vorwiderstand sein von dem Reinhard Kern sprach? Was ist Inhibit Chopping bzw. Phasen Phopping? Welches der beiden ist common?
guest12 schrieb: > Was ist das für eine Spule im Bild? Das ist deine Motorwicklung > Was bringt der Widerstand? Soll das der vorwiderstand sein von > dem Reinhard Kern sprach? Nein, dass ist ein Shunt, damit man anhand des Spannungsabfalls über diesem Widerstand den Strom bestimmen kann. Der dient als Ist-Wert-Sensor für die Stromregelung.
Aber ich kann den Schrittmotor nicht erkennen: http://www.roboternetz.de/bilder/schrittmotorprinzip.gif Wo sind jetzt hier die 2 Spulen mit den 4 Anschlüssen insgesamt?
{kind=link}
Wolfgang schrieb: > guest12 schrieb: >> Was ist das für eine Spule im Bild? > Das ist deine Motorwicklung guest12 schrieb: > Wo sind jetzt hier die 2 Spulen mit den 4 Anschlüssen insgesamt? In dem Bild ist nur die Ansteuerung der einen Motorwicklung dargestellt. Für die andere Wicklung gibt es die ganze H-Brücke incl. Shunt noch ein zweites Mal.
Hi Vielleicht wird es hierdurch: http://de.nanotec.com/support/tutorials/schrittmotor-und-bldc-motoren-animation/ verständlicher. MfG Spess
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.