Hi,
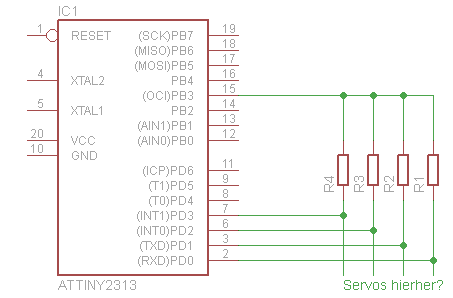
ich versuche mit dem Attiny2313 4 Servos anzusteuern.
habe mit Timern leider nicht besonders viel Erfahrung.
Jetzt hab ich hier im FOrum den Beitrag
http://www.mikrocontroller.net/articles/Modellbauservo_Ansteuerung#Signalerzeugung_f.C3.BCr_1_Servo_mittels_Timer_.28C.29
gefunden und habe ihn versucht auf die 4 Servos anzupassen. Mit halbem
Erfolg...
Hier mal mein Code:
1 | #define F_CPU 1000000UL
|
2 |
|
3 | #include <avr/io.h>
|
4 | #include <avr/interrupt.h>
|
5 | #include <util/delay.h>
|
6 |
|
7 | ISR( TIMER0_COMPA_vect ) // Interruptbehandlungsroutine
|
8 | {
|
9 | OCR0A = 2500-OCR0A;
|
10 | }
|
11 |
|
12 | ISR( TIMER0_COMPB_vect ) // Interruptbehandlungsroutine
|
13 | {
|
14 | OCR0B = 2500-OCR0B;
|
15 | }
|
16 |
|
17 | ISR( TIMER1_COMPA_vect ) // Interruptbehandlungsroutine
|
18 | {
|
19 | OCR1A = 2500-OCR1A;
|
20 | }
|
21 |
|
22 | ISR( TIMER1_COMPB_vect ) // Interruptbehandlungsroutine
|
23 | {
|
24 | OCR1B = 2500-OCR1B;
|
25 | }
|
26 |
|
27 | void init_pwm (void)
|
28 | {
|
29 |
|
30 | // Timer 0 PWM Init
|
31 |
|
32 | TCCR0A = (0 << WGM00) | (1 << WGM01) | (1 << COM0A0) | (1 << COM0B0);
|
33 | TCCR0B = (0 << WGM02) | (1 << CS00) | (1 << CS01) | (0 << CS02);
|
34 |
|
35 |
|
36 | // OC0A PWM Port
|
37 |
|
38 | DDRB |= (1 << PB2);
|
39 |
|
40 | OCR0A = 139;
|
41 |
|
42 |
|
43 | // OC0B PWM Port
|
44 |
|
45 | DDRD |= (1 << PD5);
|
46 |
|
47 | OCR0B = 139;
|
48 |
|
49 |
|
50 | // Timer 1 PWM Init
|
51 |
|
52 | TCCR1A = (1 << COM1A0) |(1 << COM1B0);
|
53 | TCCR1B = (1 << WGM12) | (1 << CS11);
|
54 | TIMSK = (1 << OCIE1A) | (1 << OCIE1B) |(1 << OCIE0A) | (1 << OCIE0B); // Timer-Compare Interrupt an
|
55 |
|
56 | // OC1A PWM Port
|
57 |
|
58 | DDRB |= (1 << PB3);
|
59 |
|
60 | OCR1A = 2250; //2250-2,0 ms
|
61 | //2312-1,5 ms
|
62 | //2374-1,0 ms
|
63 |
|
64 | // OC1B PWM Port
|
65 |
|
66 | DDRB |= (1 << PB4);
|
67 |
|
68 | OCR1B = 1125; //1185-1,0 ms
|
69 | //1156-1,5 ms
|
70 | //1125-2,0 ms
|
71 |
|
72 | }
|
73 |
|
74 | int main (void) {
|
75 |
|
76 | init_pwm();
|
77 | sei();
|
78 |
|
79 | while(1){
|
80 |
|
81 | }
|
82 |
|
83 |
|
84 | }
|
Timer1A funktioniert wie er soll. Timer1B eigenlich auch. Jedoch die
Frage, warum der OCR1B auf einen anderen Wert gesetzt werden muss, damit
ich das gleiche Ergebnis erhalte? Genauso beim Timer0. Den bekomme ich
nicht auf 20ms.
Ich könnte auch mit _delay_ms arbeiten, da der Tiny sonst nichts anderes
macht, aber wenn ich jetzt dabei bin, möchte ich natürlich eine richtige
PWM erzeugen.
Habe auch schon beispiele gesehen, bei denen ICR1 als angabe dient, die
Periodendauer anzugeben.. Bin im Moment etwas verwirrt.